Система автоматического управления торможением летательного аппарата на взлетно-посадочной полосе, летательный аппарат - RU2738927C2
Код документа: RU2738927C2
Чертежи







Описание
1. Область техники
[001] Настоящее изобретение относится к системам и способам для автоматической системы торможения, используемым для автоматического замедления летательного аппарата, а в частности, к системам и способам для автоматической системы торможения, используемым для автоматического замедления летательного аппарата, чтобы уменьшить дискомфорт пассажиров, уменьшить выработку тепловой энергии тормозной системой и уменьшить время занятости взлетно-посадочной полосы летательным аппаратом.
2. Уровень техники
[002] С ростом воздушного движения значительно увеличивается наземное движение летательных аппаратов в районах аэропортов. Маневры руления в современных аэропортах представляют собой сложные этапы независимо от того, требуется ли добраться от места погрузки до входа на взлетно-посадочную полосу для взлета или добраться от выхода с взлетно-посадочной полосы до места разгрузки.
[003] Известны предложения различных функций авиационного электронного оборудования для так называемой "навигации в аэропорту", чтобы способствовать перемещению летательного аппарата по земле, в контексте аэропорта. Например, на борту может быть отображена карта объектов в аэропорту, сопровождаемая соответствующей текстовой информацией. Это отображение может быть дополнено различными функциями, такими как масштабирование для увеличения секторов, задаваемых пилотом, или такими как функции, относящиеся к маршрутам. Также может быть отображено положение летательного аппарата, и могут быть выданы предупреждения, когда летательный аппарат начинает опасный маневр, такой как несанкционированный заход на посадку с приближением к взлетно-посадочной полосе, или не предусмотренный нормативными документами маневр, такой как вход на взлетно-посадочную полосу в обратном направлении.
Также могут быть отображены положения других летательных аппаратов, присутствующих на объекте, и могут быть предложены функции предотвращения столкновений на земле.
[004] Среди функций так называемой "навигации в аэропорту" управление выходами с взлетно-посадочной полосы после посадки для того, чтобы добраться до рулежной дорожки, является важной задачей, поскольку обеспечивает надлежащую работу аэропорта и надлежащую работу летательного аппарата. Занятость взлетно-посадочной полосы летательным аппаратом для посадки больше необходимого времени является источником задержек, связанных с ожиданием, что приводит к избыточному потреблению топлива летательным аппаратом на этапе захода на посадку и уменьшению интенсивности посадок.
[005] Занятость взлетно-посадочной полосы летательным аппаратом больше необходимого времени часто вызвана недостаточным управлением выходами с взлетно-посадочной полосы. На практике каждая посадочная полоса имеет несколько выходов, расположенных вдоль взлетно-посадочной полосы. Покидание взлетно-посадочной полосы посредством использования одного из первых выходов сокращает время занятости взлетно-посадочной полосы, а также количество топлива, которое сжигается на наземном этапе и которым нельзя пренебречь, учитывая, что при полете продолжительностью приблизительно один час количество керосина, потребленного при рулении, может составлять приблизительно 5% от общего количества потребленного керосина. Однако оптимизация выхода с взлетно-посадочной полосы не является простой задачей, поскольку она связана с многочисленными параметрами: состоянием поверхности взлетно-посадочной полосы, метеорологическими условиями, весом и состоянием летательного аппарата, в частности шин и системы торможения. Вот почему выход с взлетно-посадочной полосы никогда не планировался. Кроме того, не всегда желательно применять максимальное торможение, чтобы воспользоваться первым выходом, так как энергия замедления летательного аппарата будет в основном поглощаться тормозами, что может привести к увеличению износа тормозов и к возможной задержке времени отправления летательного аппарата, чтобы выполнить охлаждение тормозов ниже требуемого уровня перед взлетом, и оба этих фактора уменьшают прибыльность эксплуатации летательного аппарата.
[006] Текущее решение для пилота состоит в том, чтобы после касания земли носовым шасси выполнить сначала реверс тяги двигателей. Затем на втором этапе пилот управляет педалями тормоза, воздействующими на колеса. Выход с взлетно-посадочной полосы выбирается согласно эмпирической оценке пилота, который визуально оценивает первый выход, которого он может достичь на скорости, меньшей или равной максимальной скорости, допустимой для того, чтобы воспользоваться первым выходом в безопасных и комфортных условиях. Максимальная доступная скорость, чтобы воспользоваться выходом, является скоростью, выше которой использование этого выхода является рискованным с учетом угла, под которым расположен выход относительно взлетно-посадочной полосы. Этот угол может варьироваться по меньшей мере до 90 градусов, и максимальная скорость уменьшается по мере увеличения угла. Довольно часто пилот вынужден добавлять дополнительную тягу, чтобы добраться до более отдаленного выхода, потому что крайне трудно достичь выхода как раз в тот момент, когда достигается максимальная доступная скорость. Таким образом, очевидно, что условия безопасности имеют приоритет. В частности, в случае дополнительной тяги проблемы избыточного потребления керосина и чрезмерной занятости взлетно-посадочных полос в значительной степени не учитываются.
[007] Работе пилота также может способствовать система автоматического торможения, называемая "автоматом торможения", которая позволяет пилоту выбирать уровень замедления по возрастающей шкале от 1 до 2, от 1 до 3, или от 1 до 5 в зависимости от модели летательного аппарата. Систему инициируют сразу же после касания земли основным шасси, и система замедляет летательный аппарат до полной остановки в соответствии с уровнем замедления, выбранным пилотом. Система является фиксированной и не учитывает ни конкретных условий посадки, таких как состояние взлетно-посадочной полосы, ни погодных условий, ни скорости летательного аппарата, когда он совершает касание земли. Она не гарантирует тормозной дистанции, которая является переменной даже при заданном уровне замедления. Пилот должен компенсировать отсутствие гибкости системы автомата торможения посредством принятия решения, в ходе которого он визуально оценивает, можно ли воспользоваться выходом. Для этого он просто должен управлять педалями тормоза, чтобы отключить систему. Результат при этом такой же, как при торможении без использования системы автомата торможения: часто требуется добавить дополнительную тягу, чтобы добраться до более отдаленного выхода. В экономическом плане это решение не является лучшим.
[008] Кроме того, во время посадки пилот не имеет никакой возможности заранее проверить, что длина взлетно-посадочной полосы, оставшаяся перед летательным аппаратом, является достаточной для завершения без выкатывания за конец взлетно-посадочной полосы. Доступность такой информации позволяет пилоту достаточно заблаговременно оценить необходимость ухода на второй круг, чтобы попробовать совершить новый заход на посадку.
[009] Поэтому было бы желательно иметь способ и устройство, которые учитывают по меньшей мере некоторые из рассмотренных выше проблем, а также другие возможные проблемы. В частности, одна проблема заключается в определении способа и устройства для системы автомата торможения, которая автоматически замедляет летательный аппарат для повышения комфорта пассажиров, уменьшает выработку тепловой энергии тормозной системой и уменьшает время занятости взлетно-посадочной полосы летательным аппаратом.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0010] Иллюстративный вариант реализации раскрытия настоящего изобретения обеспечивает создание способа автоматического замедления летательного аппарата на взлетно-посадочной полосе. Функция торможения с учетом выхода ("brake-to-exit"), связанная с системой автомата торможения, определяет, может ли летательный аппарат совершить замедление до выбранной скорости выхода перед достижением целевого местоположения на взлетно-посадочной полосе. В случае если определено, что летательный аппарат может совершить замедление до выбранной скорости выхода перед достижением целевого местоположения, система автомата торможения автоматически замедляет летательный аппарат таким образом, что летательный аппарат достигает выбранной скорости в целевом местоположении.
[0011] Другой иллюстративный вариант реализации раскрытия настоящего изобретения обеспечивает создание системы управления автоматом торможения для управления тормозной системой для автоматического замедления летательного аппарата на взлетно-посадочной полосе. Система управления автоматом торможения использует функцию торможения с учетом выхода для определения, может ли летательный аппарат совершить замедление до выбранной скорости перед достижением целевого местоположения на взлетно-посадочной полосе. В случае если определено, что летательный аппарат может совершить замедление до выбранной скорости перед достижением целевого местоположения, система управления автоматом торможения управляет тормозной системой для автоматического замедления летательного аппарата таким образом, что летательный аппарат достигает выбранной скорости в целевом местоположении.
[0012] Еще один иллюстративный вариант реализации раскрытия настоящего изобретения обеспечивает создание летательного аппарата, содержащего систему управления автоматом торможения и систему обработки и индикации пилотажных данных, имеющую графический интерфейс пользователя. Система управления автоматом торможения управляет системой автомата торможения для автоматического замедления летательного аппарата на взлетно-посадочной полосе. Графический интерфейс пользователя в кабине экипажа показывает состояние функции торможения с учетом выхода системы управления автоматом торможения. Когда состояние функции торможения с учетом выхода инициировано, как обозначено графическим интерфейсом пользователя, система управления автоматом торможения определяет, может ли летательный аппарат совершить замедление до выбранной скорости перед достижением целевого местоположения на взлетно-посадочной полосе. В случае если определено, что летательный аппарат может совершить замедление до выбранной скорости перед достижением целевого местоположения, система управления автоматом торможения управляет тормозной системой для автоматического замедления летательного аппарата таким образом, что летательный аппарат достигает выбранной скорости в целевом местоположении.
[0013] Указанные признаки и функции могут быть реализованы независимо в различных вариантах раскрытия настоящего изобретения или могут быть скомбинированы в других вариантах реализации изобретения, дополнительные подробности которых могут быть очевидными при обращении к последующему описанию и чертежам.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0014] Признаки иллюстративных вариантов реализации изобретения, обеспечивающие новизну по сравнению с уровнем техники, изложены в прилагаемой формуле изобретения. При этом иллюстративные варианты реализации изобретения, а также предпочтительный режим их применения, дополнительные цели и признаки будут лучше поняты из следующего подробного описания иллюстративного варианта реализации раскрытия настоящего изобретения при рассмотрении вместе с сопровождающими чертежами, на которых:
[0015] на ФИГ. 1 показана иллюстрация летательного аппарата, имеющего систему торможения, включающую в себя функцию торможения с учетом выхода в соответствии с иллюстративным вариантом реализации изобретения;
[0016] на ФИГ. 2 показана иллюстрация блок-схемы летательного аппарата, имеющего систему автомата торможения, включающую в себя функцию торможения с учетом выхода в соответствии с иллюстративным вариантом реализации изобретения;
[0017] на ФИГ. 3 схематически показаны тормозная система и соответствующие органы управления в кабине экипажа, реализованные в соответствии с иллюстративным вариантом реализации изобретения;
[0018] на ФИГ. 4 показаны несколько состояний управления и логическая схема управления для системы автомата торможения, включающая в себя функцию торможения с учетом выхода, в соответствии с иллюстративным вариантом реализации изобретения;
[0019] на ФИГ. 5 показана иллюстрация примера профиля торможения возле выхода для системы автомата торможения, включающей в себя функцию торможения с учетом выхода, в соответствии с иллюстративным вариантом реализации изобретения;
[0020] на ФИГ. 6 показана иллюстрация примера профиля торможения на большом расстоянии от выхода для системы автомата торможения, включающей в себя функцию торможения с учетом выхода, в соответствии с иллюстративным вариантом реализации изобретения;
[0021] на ФИГ. 7 показана иллюстрация примера профиля торможения с расстоянием невозможности выхода для системы автомата торможения, включающей в себя функцию торможения с учетом выхода, в соответствии с иллюстративным вариантом реализации изобретения
[0022] на ФИГ. 8 показана иллюстрация структурной схемы процесса автоматического замедления летательного аппарата на взлетно-посадочной полосе с использованием системы управления автоматом торможения, имеющей функцию торможения с учетом выхода, в соответствии с иллюстративным вариантом реализации изобретения;
[0023] на ФИГ. 9 показана иллюстрация структурной схемы процесса автоматического замедления летательного аппарата на взлетно-посадочной полосе с использованием системы управления автоматом торможения, имеющей функцию торможения с учетом выхода, имеющую различные состояния управления в соответствии с иллюстративным вариантом реализации изобретения;
[0024] на ФИГ. 10 показана иллюстрация блок-схемы компьютерной системы, в которой может быть реализована функция торможения с учетом выхода для системы управления автоматом торможения в соответствии с иллюстративным вариантом изобретения;
[0025] на ФИГ. 11 показана иллюстрация блок-схемы способа изготовления и обслуживания летательного аппарата в соответствии с иллюстративным вариантом реализации изобретения; и
[0026] на ФИГ. 12 показана иллюстрация блок-схемы летательного аппарата, в котором может быть реализован иллюстративный вариант изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0027] В различных иллюстративных вариантах реализации изобретения признается и учитывается несколько различных соображений. Выражение "несколько" при использовании в настоящем документе со ссылкой на объекты означает один или более объектов. Например, выражение "несколько различных соображений" означает одно или более различных соображений.
[0028] В различных иллюстративных вариантах реализации изобретения признается и учитывается, что известная система автоматического торможения на летательном аппарате включает в себя несколько режимов работы, которые могут быть выбраны оператором. В различных иллюстративных вариантах реализации изобретения признается и учитывается, что существующие режимы управления системой автоматического торможения могут приводить к увеличению дискомфорта пассажиров, выработке тормозной системой излишней тепловой энергии и увеличению времени занятости взлетно-посадочной полосы летательным аппаратом более, чем желательно.
[0029] Иллюстративные варианты реализации изобретения обеспечивают создание систем и способов для управления системой автоматического торможения. В соответствии с различными вариантами реализации изобретения логическая схема управления для режима работы управления системой автоматического торможения при торможении с учетом выхода осуществляется программным образом. Логическая схема управления, управляющая работой системы автоматического торможения, может быть отдельной от устройства, используемого для взаимодействия с системой автоматического торможения.
[0030] Иллюстративные варианты реализации изобретения обеспечивают создание систем и способов для управления системой автоматического торможения. В соответствии с различными вариантами реализации изобретения в кабине экипажа летательного аппарата могут быть предусмотрены различные устройства отображения и интерфейсы оператора. Устройства отображения могут обозначать режим торможения с учетом выхода системы автоматического торможения.
[0031] Управление устройствами отображения может выполняться посредством интерфейса оператора. Интерфейс оператора может быть устройством, с которым оператор взаимодействует для обеспечения ввода, указывающего режим работы системы автоматического торможения с учетом выхода. Например, в различных вариантах реализации изобретения интерфейс оператора может представлять собой интерфейс в виде сенсорного экрана. В качестве альтернативы, в других вариантах реализации изобретения интерфейс оператора может быть механическим устройством, выполненным с возможностью перемещения оператором для выбора выбираемого режима работы. Интерфейс оператора может быть выполнен отдельно и на удалении от устройства отображения.
[0032] Со ссылкой на чертежи, в частности, со ссылкой на ФИГ. 1, показан летательный аппарат в соответствии с иллюстративным вариантом реализации изобретения. Летательный аппарат 100 может быть коммерческим пассажирским летательным аппаратом, грузовым летательным аппаратом, винтокрылом, самолетом, военным летательным аппаратом или летательным аппаратом любого другого типа.
[0033] В этом иллюстративном примере летательный аппарат 100 имеет крыло 102 и крыло 104, прикрепленные к корпусу 106. Летательный аппарат 100 включает в себя двигатель 108, прикрепленный к крылу 102, и двигатель 110, прикрепленный к крылу 104.
[0034] Корпус 106 имеет хвостовую часть 112. Горизонтальный стабилизатор 114, горизонтальный стабилизатор 116 и вертикальный стабилизатор 118 прикреплены к хвостовой части 112 корпуса 106.
[0035] Летательный аппарат 100 может включать в себя систему 120 торможения для реализации различных функций торможения на летательном аппарате 100. Система 120 торможения может управлять замедлением летательного аппарата 100. Например, без ограничения, система 120 торможения может управлять приложением давления торможения к тормозам 122 летательного аппарата 100 для управления скоростью замедления летательного аппарата 100. В качестве еще одного примера, система 120 торможения может управлять тормозами 122 летательного аппарата 100 для замедления летательного аппарата 100 до выбранной скорости. В качестве еще одного примера, система 120 торможения может управлять работой тормозов 122 для замедления летательного аппарата 100 до выбранной скорости до того, как летательный аппарат 100 достигает целевого местоположения на взлетно-посадочной полосе, такого как местоположение выхода, в котором летательный аппарат 100 должен выйти с взлетно-посадочной полосы.
[0036] Летательный аппарат 100 является примером летательного аппарата, в котором может быть реализована система управления автоматом торможения для управления замедлением летательного аппарата согласно функции торможения с учетом выхода, в соответствии с иллюстративным вариантом реализации изобретения.
[0037] Эта иллюстрация летательного аппарата 100 представлена для иллюстрации одной среды, в которой могут быть реализованы различные иллюстративные варианты изобретения. Иллюстрация летательного аппарата 100 на ФИГ. 1 не подразумевает наложения архитектурных ограничений на способ, которым могут быть реализованы различные иллюстративные варианты изобретения. Например, летательный аппарат 100 показан в виде коммерческого пассажирского летательного аппарата. Различные иллюстративные варианты реализации изобретения могут применяться к другим типам летательных аппаратов, таким как частные пассажирские летательные аппараты, винтокрыл и летательные аппараты любых других подходящих типов.
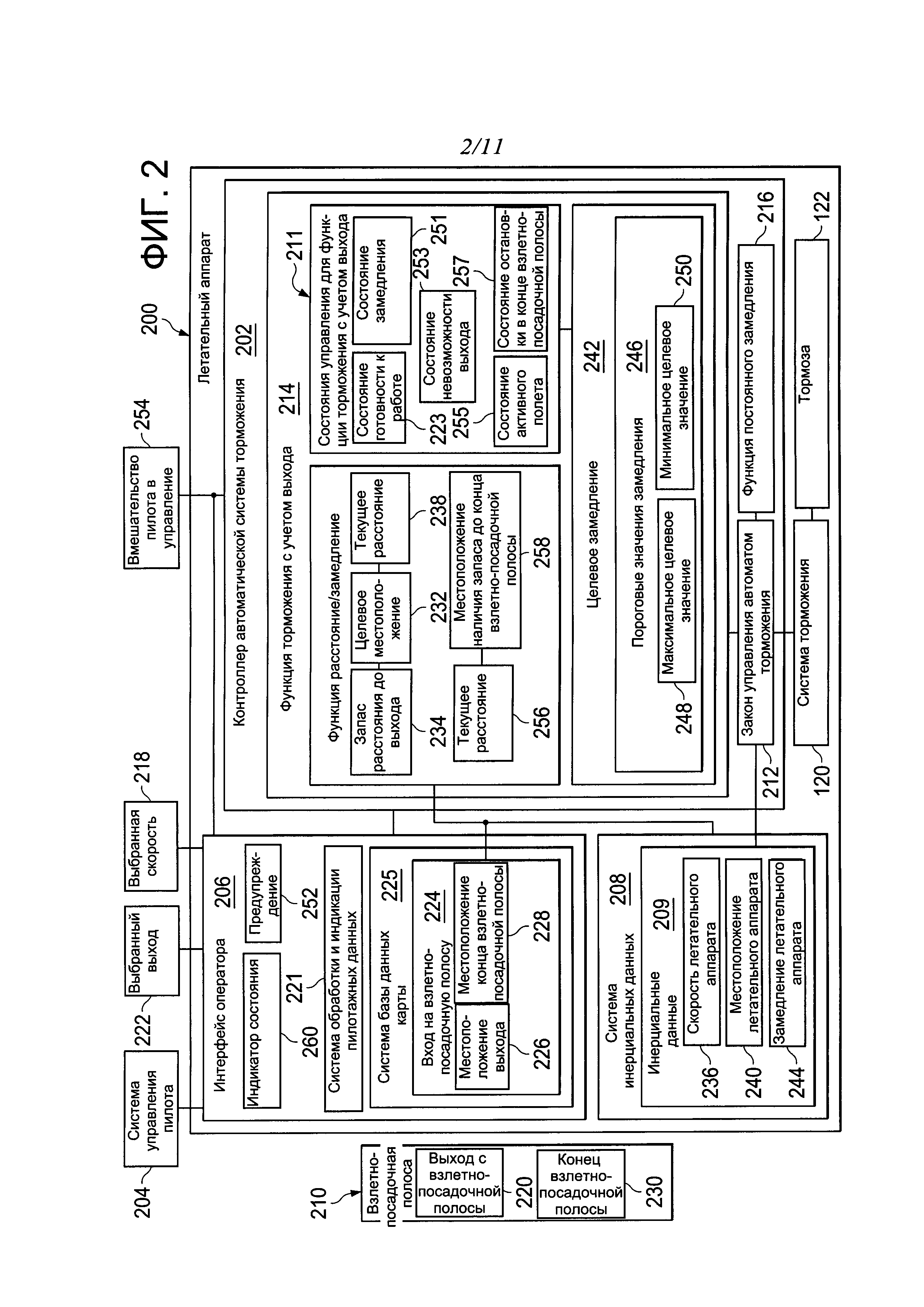
[0038] На ФИГ. 2 показана блок-схема летательного аппарата, имеющего систему управления автоматом торможения, включающую в себя функцию торможения с учетом выхода, в соответствии с иллюстративным вариантом реализации изобретения. В приведенных иллюстративных примерах одна и та же ссылочная позиция может использоваться более чем на одном чертеже. Это повторное использование ссылочной позиции на разных чертежах представляет один и тот же элемент на указанных разных чертежах. Летательный аппарат 200 представляет собой иллюстративный вариант реализации изобретения летательного аппарата 100, изображенного на ФИГ. 1.
[0039] Летательный аппарат 200 включает в себя несколько различных компонентов. Как показано на чертежах, летательный аппарат 200 включает в себя контроллер 202 автоматической системы торможения, систему 204 управления пилота, интерфейс 206 оператора и систему 208 инерциальных данных.
[0040] Контроллер 202 автоматической системы торможения управляет работой системы 120 торможения согласно одному из состояний 211 управления в отношении торможения с учетом выхода для автоматического замедления летательного аппарата 200 при движении вдоль взлетно-посадочной полосы 210. Контроллер 202 автоматической системы торможения включает в себя закон 212 управления автоматом торможения. Закон 212 управления автоматом торможения вырабатывает выходную команду автоматического торможения для системы 120 торможения и тормозов 122 для автоматического замедления летательного аппарата 200 при движении вдоль взлетно-посадочной полосы 210 согласно нескольким выбираемым функциям торможения, включающим в себя по меньшей мере одну такую функцию, как функция 214 торможения с учетом выхода и функция 216 постоянного замедления.
[0041] В этом иллюстративном примере контроллер 202 автоматической системы торможения может управляться согласно нескольким выбираемым функциям торможения, функции 214 торможения с учетом выхода и функции 216 постоянного замедления. Контроллер 202 автоматической системы торможения может быть реализован в виде программного приложения. Контроллер 202 автоматической системы торможения может включать в себя программную логическую схему управления для управления работой системы 120 торможения для автоматического замедления летательного аппарата 200 согласно выбранному рабочему режиму.
[0042] В этом иллюстративном примере функция 214 торможения с учетом выхода является одной из нескольких выбираемых функций торможения для управления контроллером 202 автоматической системы торможения. Когда контроллер 202 автоматической системы торможения реализован в виде программного приложения, функция 214 торможения с учетом выхода представляет собой программную логическую схему управления, используемую для управления работой системы 120 торможения для автоматического замедления летательного аппарата 200 таким образом, что летательный аппарат 200 стремится замедлиться до выбранной скорости 218 перед достижением выхода 220 с взлетно-посадочной полосы на взлетно-посадочной полосе 210.
[0043] Летательный аппарат 200 включает в себя систему 204 управления пилота. Оператор летательного аппарата 200 может инициировать функцию 214 торможения с учетом выхода посредством ввода параметров, таких как выбранная скорость 218 и выбранный выход 222, в систему 204 управления пилота. При инициировании функция 214 торможения с учетом выхода вводит состояние 223 готовности к работе, когда оператор летательного аппарата 200 задействует контроллер 202 автоматической системы торможения.
[0044] В этом иллюстративном примере выбранная скорость 218 соответствует скорости руления, или скорости на выходе с взлетно-посадочной полосы, летательного аппарата 200. Поскольку выбранная скорость 218 может быть выбрана оператором летательного аппарата 200, выбранная скорость 218 обеспечивает более высокую скорость руления, когда выход 220 с взлетно-посадочной полосы является высокоскоростным выходом возле зоны касания с взлетно-посадочной полосой 210. В одном иллюстративном варианте реализации изобретения выбранная скорость 218 является скоростью по умолчанию величиной примерно 15 узлов (27,8 км/ч).
[0045] В этом иллюстративном примере взлетно-посадочная полоса 210 соответствует входу 224 на взлетно-посадочную полосу системы 225 базы данных карты. Система 225 базы данных карты представляет собой базу данных или другую структуру данных, которая включает в себя информацию о местоположении для взлетно-посадочных полос, включающих в себя взлетно-посадочную полосу 210. Как показано на чертежах, вход 224 на взлетно-посадочную полосу включает в себя местоположение 226 выхода и местоположение 228 конца взлетно-посадочной полосы. Местоположение 226 выхода представляет собой информацию о местоположении, такую как информация о координатах в глобальной системе местоопределения, которая однозначно определяет местоположение выхода 220 с взлетно-посадочной полосы. Местоположение 228 конца взлетно-посадочной полосы представляет собой информацию о местоположении, такую как информация о координатах в глобальной системе местоопределения, которая однозначно определяет местоположение конца 230 взлетно-посадочной полосы.
[0046] На основании местоположения 226 выхода функция 214 торможения с учетом выхода определяет целевое местоположение 232. Целевое местоположение 232 представляет собой информацию о местоположении, такую как информация о координатах в глобальной системе местоопределения, которая однозначно определяет необходимое местоположение на взлетно-посадочной полосе 210, в котором летательный аппарат 200 должен достичь выбранной скорости 218.
[0047] В одном иллюстративном примере функция 214 торможения с учетом выхода определяет целевое местоположение 232 посредством вычитания запаса 234 расстояния до выхода из местоположения 226 выхода. Запас 234 расстояния до выхода представляет собой отрезок взлетно-посадочной полосы 210, который после замедления до выбранной скорости 218 позволяет оператору летательного аппарата 200 привыкнуть к скорости 236 летательного аппарата перед выходом с взлетно-посадочной полосы 210. Запас 234 расстояния до выхода выбирают на основании предпочтительного значения расстояния, на котором летательный аппарат должен находиться от выхода 220 с взлетно-посадочной полосы, чтобы скорость 236 летательного аппарата 200 достигла выбранной скорости 218.
[0048] В одном иллюстративном примере замедление до выбранной скорости 218 в целевом местоположении 232 позволяет избежать ошибок в вычислении и быстрых изменений замедления по мере того, как текущее расстояние 238 между летательным аппаратом 200 и местоположением 226 выхода приближается к нулю. Таким образом, замедление до выбранной скорости 218 в целевом местоположении 232 обеспечивает получение сглаженного профиля замедления по мере того, как летательный аппарат 200 приближается к целевому местоположению 232 на взлетно-посадочной полосе 210.
[0049] Текущее расстояние 238 является расстоянием между местоположением 240 летательного аппарата и целевым местоположением 232. Местоположение 240 летательного аппарата представляет собой информацию о местоположении, такую как информация о координатах в глобальной системе местоопределения, которая однозначно определяет местоположение летательного аппарата 200. Местоположение 240 летательного аппарата вычисляют в системе 208 инерциальных данных исходя из данных бортовых датчиков, например, глобальной системы местоопределения. На основании целевого местоположения 232 и местоположения 240 летательного аппарата, функция 214 торможения с учетом выхода вычисляет текущее расстояние 238.
[0050] Когда контроллер 202 автоматической системы торможения управляет работой системы 120 торможения согласно функции 214 торможения с учетом выхода, контроллер 202 автоматической системы торможения определяет, может ли летательный аппарат 200 совершить замедление до выбранной скорости 218 перед достижением целевого местоположения 232. Если контроллер 202 автоматической системы торможения определяет, что летательный аппарат 200 может совершить замедление до выбранной скорости 218 перед достижением целевого местоположения 232, контроллер 202 автоматической системы торможения управляет работой системы 120 торможения для автоматического замедления летательного аппарата 200 таким образом, что летательный аппарат 200 достигает выбранной скорости 218, когда летательный аппарат 200 достигает целевого местоположения 232.
[0051] Еще в одном иллюстративном примере контроллер 202 автоматической системы торможения автоматически замедляет летательный аппарат 200 с комфортабельным уровнем замедления посредством непрерывной корректировки целевого замедления 242 для обеспечения, что летательный аппарат 200 достигает выбранной скорости 218 в целевом местоположении 232.
[0052] Целевое замедление 242 представляет собой замедление, которое необходимо для замедления летательного аппарата 200 таким образом, что летательный аппарат 200 достигает выбранной скорости 218, когда местоположение 240 летательного аппарата достигает целевого местоположения 232. Функция 214 торможения с учетом выхода итеративно определяет и корректирует целевое замедление 242 на основании выбранной скорости 218, местоположения 240 летательного аппарата, скорости 236 летательного аппарата и текущего расстояния 238. Функция 214 торможения с учетом выхода обеспечивает выдачу целевого замедления 242 в закон 212 управления автоматом торможения в контроллере 202 автоматической системы торможения. На основании замедления 244 летательного аппарата и целевого замедления 242, закон 212 управления автоматом торможения вырабатывает выходную команду автоматического торможения для системы 120 торможения и тормозов 122 таким образом, что летательный аппарат 200 совершает замедление в комфортных условиях до выбранной скорости 218, когда местоположение 240 летательного аппарата достигает целевого местоположения 232.
[0053] В одном иллюстративном примере функция 214 торможения с учетом выхода обеспечивает замедление летательного аппарата 200 в комфортных условиях до выбранной скорости 218 посредством обеспечения выдачи пороговых значений 246 замедления для целевого замедления 242. Пороговые значения 246 замедления ограничивают диапазон предпочтительного замедления для летательного аппарата 200 на основании по меньшей мере одного такого параметра, как комфорт пассажиров, выработка тепловой энергии, время нахождения на взлетно-посадочной полосе или комбинации указанного.
[0054] Как показано на чертежах, пороговые значения 246 замедления включают в себя максимальное целевое значение 248 и минимальное целевое значение 250. Максимальное целевое значение 248 является максимальным пороговым значением для целевого замедления 242. В одном иллюстративном примере максимальное целевое значение 248 может быть замедлением величиной примерно 7,5 фут/с2 (7,5 футов в секунду в квадрате или 2,29 м/с2). Минимальное целевое значение 250 является минимальным пороговым значением для целевого замедления 242. В одном иллюстративном примере минимальное целевое значение 250 может быть замедлением величиной примерно 5 фут/с2 (5 футов в секунду в квадрате или 1,52 м/с2).
[0055] Еще в одном иллюстративном примере контроллер 202 автоматической системы торможения отслеживает местоположение 240 летательного аппарата и скорость 236 летательного аппарата для вычисления целевого замедления 242. Когда целевое замедление 242 превышает минимальное целевое значение 250 летательного аппарата 200, функция 214 торможения с учетом выхода вводит состояние 251 замедления. В состоянии 251 замедления функция 214 торможения с учетом выхода обеспечивает выдачу целевого замедления 242 в закон 212 управления автоматом торможения в контроллере 202 автоматической системы торможения. На основании замедления 244 летательного аппарата и целевого замедления 242, закон 212 управления автоматом торможения вырабатывает выходную команду автоматического торможения для системы 120 торможения и тормозов 122 таким образом, что летательный аппарат 200 совершает замедление в комфортных условиях до выбранной скорости 218, когда местоположение 240 летательного аппарата достигает целевого местоположения 232.
[0056] Хотя контроллер 202 автоматической системы торможения отслеживает местоположение 240 летательного аппарата и скорость 236 летательного аппарата в состоянии 223 готовности к работе, летательный аппарат 200 может испытывать пассивное замедление. При использовании в настоящем документе термин "пассивное замедление" означает часть замедления 244 летательного аппарата, осуществляемого вследствие по меньшей мере одного такого параметра, как лобовое сопротивление летательного аппарата, использование реверсивных устройств, интерцепторов и сочетания указанного, без применения тормозов 122. Пассивное замедление обычно меньше, чем минимальное целевое значение 250. Поскольку функция 214 торможения с учетом выхода не обеспечивает активного замедления летательного аппарата 200 до тех пор, пока целевое замедление 242 не достигнет минимального целевого значения 250, функция 214 торможения с учетом выхода обеспечивает для летательного аппарата 200 возможность воспользоваться большей длиной взлетно-посадочной полосы с перемещением туда, где выход 220 с взлетно-посадочной полосы расположен дальше от зоны касания с взлетно-посадочной полосой 210. Поскольку функция 214 торможения с учетом выхода не обеспечивает активного замедления летательного аппарата 200 до тех пор, пока целевое замедление 242 не достигнет минимального целевого значения 250, функция 214 торможения с учетом выхода уменьшает выработку тепловой энергии тормозами 122. Кроме того, поскольку летательный аппарат 200 пассивно замедляется при скорости, которая меньше минимального целевого значения 250, функция 214 торможения с учетом выхода уменьшает время занятости взлетно-посадочной полосы летательным аппаратом 200, поскольку функция 214 торможения с учетом выхода не обеспечивает активного замедления летательного аппарата 200 до тех пор, пока целевое замедление 242 не достигнет минимального целевого значения 250.
[0057] Еще в одном иллюстративном примере, если контроллер 202 автоматической системы торможения определяет, что летательный аппарат 200 не может совершить замедления до выбранной скорости 218 перед достижением целевого местоположения 232 или не может совершить замедления в комфортных условиях до выбранной скорости 218 без превышения максимального целевого значения 248 перед достижением целевого местоположения 232, функция 214 торможения с учетом выхода вводит состояние 253 невозможности выхода. Интерфейс 206 оператора отображает предупреждение 252 о том, что летательный аппарат 200 не может совершить замедления в комфортных условиях до выбранной скорости 218 перед достижением целевого местоположения 232. В состоянии 253 невозможности выхода функция 214 торможения с учетом выхода обеспечивает выдачу целевого замедления 242, установленного на минимальное целевое значение 250, в закон 212 управления автоматом торможения в контроллере 202 автоматической системы торможения. Закон 212 управления автоматом торможения вырабатывает выходную команду автоматического торможения для системы 120 торможения и тормозов 122 таким образом, что летательный аппарат 200 совершает замедление в комфортных условиях до выбранной скорости 218, когда местоположение 240 летательного аппарата достигает целевого местоположения 232.
[0058] Таким образом, когда функция 214 торможения с учетом выхода определяет, что летательный аппарат 200 не может совершить замедления до выбранной скорости 218 перед достижением целевого местоположения 232, функция 214 торможения с учетом выхода игнорирует местоположение 226 ранее назначенного выбранного выхода 222 и выдает предупреждение оператору летательного аппарата 200 о том, что летательный аппарат 200 не способен совершить выход со взлетно-посадочной полосы 210 на выходе 220 с взлетно-посадочной полосы. Предупреждение может быть выдано в виде предупреждения 252, отображаемого на интерфейсе 206 оператора летательного аппарата 200. Интерфейс 206 оператора может быть устройством, посредством которого оператор летательного аппарата 200 взаимодействует с контроллером 202 автоматической системы торможения. Например, в различных вариантах реализации изобретения интерфейс оператора может представлять собой интерфейс в виде сенсорного экрана. В качестве альтернативы, в других вариантах реализации изобретения предупреждение 252 может быть выдано в кабине экипажа летательного аппарата 200 в виде предупреждения, например, посредством светового или другого индикатора.
[0059] Продолжая рассматривать текущий пример, когда функция 214 торможения с учетом выхода определяет, что летательный аппарат 200 не может совершить замедления до выбранной скорости 218 перед достижением целевого местоположения 232, функция 214 торможения с учетом выхода обеспечивает выдачу целевого замедления 242, установленного на минимальное целевое значение 250, в закон 212 управления автоматом торможения в контроллере 202 автоматической системы торможения. Закон 212 управления автоматом торможения вырабатывает выходную команду автоматического торможения для системы 120 торможения и тормозов 122 таким образом, что летательный аппарат 200 совершает замедление в комфортных условиях до выбранной скорости 218 в месте, расположенном на взлетно-посадочной полосе 210 за пределами целевого местоположения 232. Таким образом, функция 214 торможения с учетом выхода обеспечивает замедление летательного аппарата 200 до выбранной скорости 218 таким образом, который приводит к уменьшению дискомфорта пассажиров, выработки тепловой энергии тормозами 122 и времени занятости взлетно-посадочной полосы, которое летательный аппарат 200 находится на взлетно-посадочной полосе 210.
[0060] Еще в одном иллюстративном примере после замедления летательного аппарата 200 до выбранной скорости 218, функция 214 торможения с учетом выхода вводит состояние 255 активного полета. При нахождении в состоянии 255 активного полета функция 214 торможения с учетом выхода поддерживает выбранную скорость 218 до приема сигнала вмешательства 254 пилота в управление, приводящего к отключению контроллера 202 автоматической системы торможения. Вмешательство 254 пилота в управление представляет собой любое действие, предпринимаемое оператором летательного аппарата 200, который вмешивается в управление системой 120 торможения посредством контроллера 202 автоматической системы торможения. Вмешательство 254 пилота в управление может представлять собой, например, но без ограничения, ручное управление тормозами 122, увеличение тяги двигателей, таких как двигатели 108 и 110, показанные на ФИГ. 1, и выключение функции 214 торможения с учетом выхода.
[0061] Посредством поддержания выбранной скорости 218 до приема сигнала вмешательства 254 пилота в управление, функция 214 торможения с учетом выхода обеспечивает поддержание летательным аппаратом 200 выбранной скорости 218 посредством, например, компенсирования любой остаточной тяги двигателей, таких как двигатели 108 и 110, показанные на ФИГ. 1. Таким образом, функция 214 торможения с учетом выхода обеспечивает продолжение движения летательного аппарата 200 вдоль взлетно-посадочной полосы 210 с выбранной скоростью 218 с уменьшением времени занятости взлетно-посадочной полосы, которое летательный аппарат 200 находится на взлетно-посадочной полосе 210.
[0062] Еще в одном иллюстративном примере контроллер 202 автоматической системы торможения автоматически замедляет летательный аппарат 200 посредством определения текущего расстояния 256 между местоположением 240 летательного аппарата и местоположением 228 конца взлетно-посадочной полосы. Если функция 214 торможения с учетом выхода определяет, что летательный аппарат 200 прошел местоположение 258 наличия запаса до конца взлетно-посадочной полосы, функция 214 торможения с учетом выхода вводит состояние 257 остановки в конце взлетно-посадочной полосы. При нахождении в состоянии 257 остановки в конце взлетно-посадочной полосы функция 214 торможения с учетом выхода управляет законом 212 управления скоростью и системой 120 торможения для автоматического замедления летательного аппарата 200 от выбранной скорости 218 с получением целевого замедления 242 или за пределами этого параметра таким образом, что летательный аппарат 200 выполняет остановку до выбега за конец 230 взлетно-посадочной полосы.
[0063] Функция 214 торможения с учетом выхода вычисляет текущее расстояние 256 на основании местоположения 240 летательного аппарата, полученного от системы 208 инерциальных данных. Местоположение 258 наличия запаса до конца взлетно-посадочной полосы представляет собой место, расположенное на взлетно-посадочной полосе 210, достаточно удаленное от конца 230 взлетно-посадочной полосы, выбранное таким образом, что летательный аппарат 200 замедляется до полной остановки до выбега за конец 230 взлетно-посадочной полосы. При отсутствии вмешательства 254 пилота в управление, приводящего к отключению системы 120 торможения, функция 214 торможения с учетом выхода управляет работой системы 120 торможения таким образом, что летательный аппарат 200 замедляется до полной остановки, когда летательный аппарат 200 прошел местоположение 258 наличия запаса до конца взлетно-посадочной полосы. Таким образом, функция 214 торможения с учетом выхода предотвращает непреднамеренный выбег летательного аппарата 200 за конец 230 взлетно-посадочной полосы.
[0064] Еще в одном иллюстративном примере интерфейс 206 оператора включает в себя индикатор 260 состояния. Индикатор 260 состояния является индикацией, отображаемой на интерфейсе 206 оператора и показывающей по меньшей мере состояние функции 214 торможения с учетом выхода. Когда индикатор 260 состояния указывает на выбор функции 214 торможения с учетом выхода, функция 214 торможения с учетом выхода управляет работой системы 120 торможения для автоматического замедления летательного аппарата 200 таким образом, что летательный аппарат 200 достигает выбранной скорости 218 в целевом местоположении 232.
[0065] Иллюстрация летательного аппарата 200 по ФИГ. 2 не подразумевает наложения каких-либо физических или архитектурных ограничений на способ, которым может быть реализован иллюстративный вариант изобретения. Могут быть использованы компоненты, отличающиеся от проиллюстрированных, в дополнение или вместо них. Некоторые компоненты могут быть необязательными. Также, указанные блоки показаны для иллюстрации некоторых функциональных компонентов. Один или более из этих блоков могут быть скомбинированы, разделены или скомбинированы и разделены на другие блоки при реализации в иллюстративном варианте реализации изобретения.
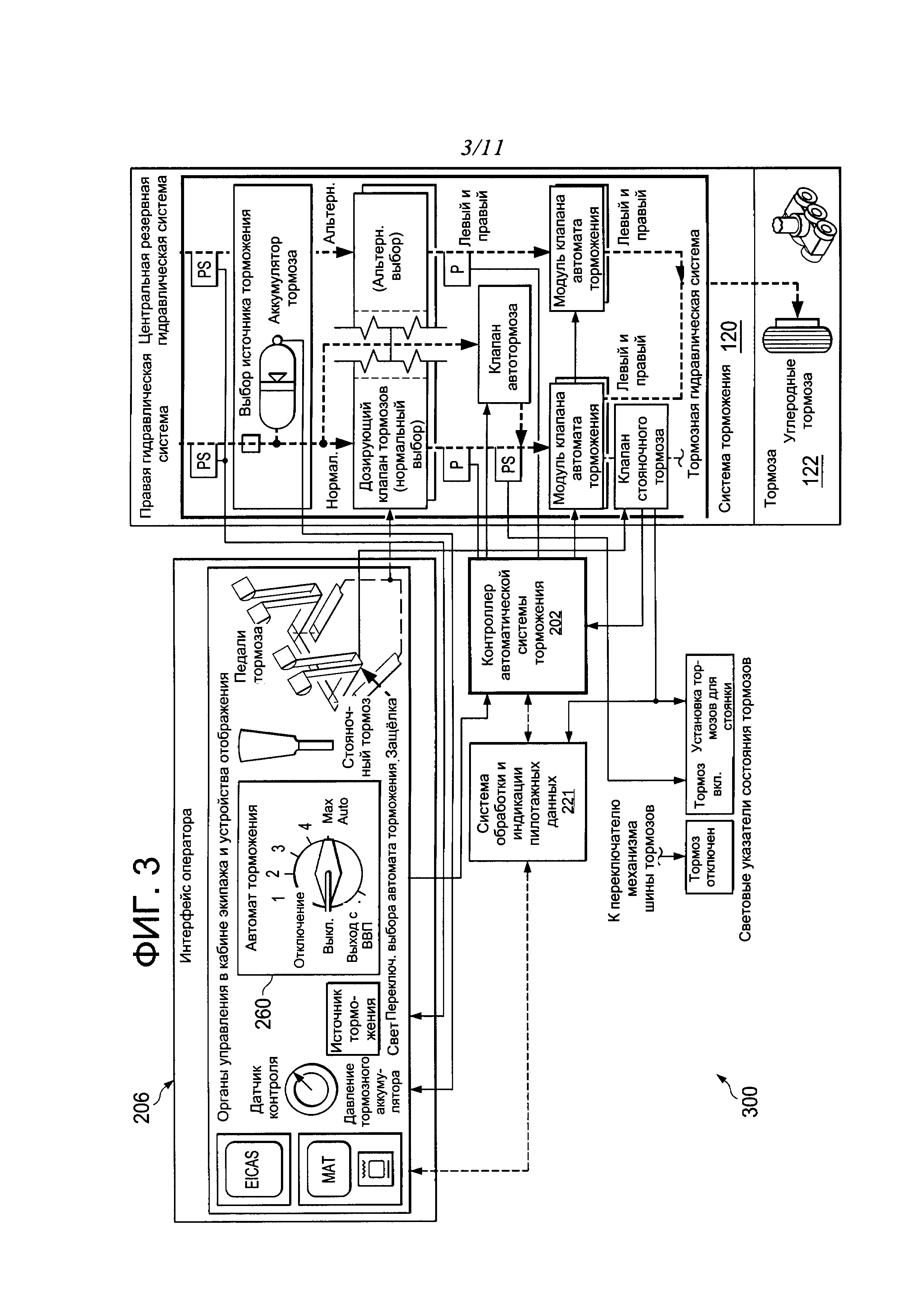
[0066] На ФИГ. 3 схематически показаны гидравлическая тормозная система и соответствующие органы управления в кабине экипажа, реализованные в соответствии с иллюстративным вариантом реализации изобретения. Схемой 300 проиллюстрированы поток данных и взаимодействия между различными компонентами тормозной системы летательного аппарата 200 по ФИГ. 2.
[0067] Схема 300 является схематическим изображением гидравлической тормозной системы. Однако схема 300 не подразумевает наложения архитектурных ограничений на способ, которым могут быть реализованы различные иллюстративные варианты реализации изобретения. Например, контроллер 202 автоматической системы торможения, включающий в себя функцию 214 торможения с учетом выхода, также может быть применен в летательном аппарате, имеющем электрическую тормозную систему.
[0068] В этом иллюстративном примере интерфейс 206 оператора включает в себя органы управления в кабине экипажа и устройства отображения для автоматического замедления летательного аппарата, такого как летательный аппарат 200 по ФИГ. 2, до выбранной скорости, такой как выбранная скорость 218 по ФИГ. 2, в целевом местоположении, таком как целевое местоположение 232 по ФИГ. 2.
[0069] Как показано на чертежах, интерфейс 206 оператора включает в себя индикатор 260 состояния. Когда индикатор 260 состояния указывает на выбор функции 214 торможения с учетом выхода, как показано на ФИГ. 2, функция 214 торможения с учетом выхода обеспечивает выдачу целевого замедления 242 в закон 212 управления автоматом торможения в контроллере 202 автоматической системы торможения. На основании замедления 244 летательного аппарата и целевого замедления 242, закон 212 управления автоматом торможения вырабатывает выходную команду автоматического торможения для системы 120 торможения и тормозов 122 таким образом, что летательный аппарат 200 совершает замедление в комфортных условиях до выбранной скорости 218, когда местоположение 240 летательного аппарата достигает целевого местоположения 232.
[0070] Как показано на чертежах, функция 214 торможения с учетом выхода принимает инерциальные данные 209 от системы 208 инерциальных данных, показанной в блочной форме на ФИГ. 2. На основании приема инерциальных данных 209 от системы 221 обработки и индикации пилотажных данных, функция 214 торможения с учетом выхода может определить целевое замедление 242 для летательного аппарата 200, текущее расстояние 238 и текущее расстояние 256, все из которых показаны на ФИГ. 2. На основании данных, принятых от системы 221 обработки и индикации пилотажных данных, системы 225 базы данных карты и системы 208 инерциальных данных, контроллера 202 автоматической системы торможения, управление согласно функции 214 торможения с учетом выхода, обеспечивает замедление летательного аппарата 200 до выбранной скорости 218, показанной в блочной форме на ФИГ. 2, перед достижением целевого местоположения на взлетно-посадочной полосе, такого как целевое местоположение 232 на взлетно-посадочной полосе 210, при этом оба объекта показаны в блочной форме на ФИГ. 2.
[0071] На ФИГ. 4 показано несколько состояний управления и логическая схема управления для системы автомата торможения, включающая в себя функцию торможения с учетом выхода, в соответствии с иллюстративным вариантом реализации изобретения. Как показано на чертежах, состояния управления, проиллюстрированные на ФИГ. 4, представляют собой состояния управления 211 для функции 214 торможения с учетом выхода, при этом оба объекта показаны в блочной форме на ФИГ. 2.
[0072] Инициирование 406 применения автоматического тормоза инициируют, когда система 120 торможения по ФИГ. 2 может быть использована для посадки. Когда задействовано инициирование 406 применения автоматического тормоза, оператор может инициировать функцию 214 торможения с учетом выхода, или функцию 216 постоянного замедления. Как показано на ФИГ. 2, оператор может инициировать функцию 214 торможения с учетом выхода посредством ввода выбранной скорости 218 и выбранного выхода 222 в интерфейсе 206 оператора.
[0073] После того как оператор летательного аппарата применил систему автоматического торможения, такую как система 120 торможения по ФИГ. 2, и указал местоположение выхода с взлетно-посадочной полосы, такое как местоположение 226 выхода с взлетно-посадочной полосы 210, при этом оба объекта показаны на ФИГ. 2, инициируют функцию 214 торможения с учетом выхода, как показано инициированием 406 применения автоматического тормоза, и ожидают касания земли летательным аппаратом 200. Затем функция 214 торможения с учетом выхода вводит состояние 223 готовности к работе.
[0074] В состоянии 223 готовности к работе функция 214 торможения с учетом выхода обеспечивает возможность пассивного замедления летательного аппарата 200 до тех пор, пока целевое замедление 242 не превысит минимального целевого значения 250, при этом оба объекта показаны в блочной форме на ФИГ. 2. Контроллер 202 автоматической системы торможения отслеживает местоположение 240 летательного аппарата и скорость 236 летательного аппарата для вычисления целевого замедления 216. Когда целевое замедление 216 превышает минимальное целевое значение 250 летательного аппарата 200, функция 214 торможения с учетом выхода вводит состояние 251 замедления. В состоянии 251 замедления функция 214 торможения с учетом выхода обеспечивает выдачу целевого замедления 242 в закон 212 управления автоматом торможения в контроллере 202 автоматической системы торможения. На основании замедления 244 летательного аппарата и целевого замедления 242, закон 212 управления автоматом торможения вырабатывает выходную команду автоматического торможения для системы 120 торможения и тормозов 122 таким образом, что летательный аппарат 200 совершает замедление в комфортных условиях до выбранной скорости 218, когда местоположение 240 летательного аппарата достигает целевого местоположения 232. Посредством пассивного замедления летательного аппарата 200, функция 214 торможения с учетом выхода позволяет летательному аппарату 200 воспользоваться большей длиной взлетно-посадочную полосы, где выход 220 с взлетно-посадочной полосы расположен дальше от зоны касания с взлетно-посадочной полосой 210.
[0075] При нахождении в состоянии 223 готовности к работе функция 214 торможения с учетом выхода итеративно определяет целевое замедление 242, необходимое для замедления летательного аппарата 200 до выбранной скорости 218 в целевом местоположении 232. Когда функция 214 торможения с учетом выхода определяет, что целевое замедление 242 превышает минимальное целевое значение 250 летательного аппарата 200, функция 214 торможения с учетом выхода вводит состояние 251 замедления.
[0076] В состоянии 251 замедления функция 214 торможения с учетом выхода управляет системой 120 торможения для замедления летательного аппарата 200 таким образом, что летательный аппарат 200 достигает выбранной скорости 218 в целевом местоположении 232. При нахождении в состоянии 251 замедления функция 214 торможения с учетом выхода итеративно определяет целевое замедление 242 и выдает команды в закон 212 управления автоматом торможения для корректировки применения тормозов 122 посредством системы 120 торможения таким образом, что летательный аппарат 200 достигает выбранной скорости 218 в целевом местоположении 232.
[0077] Если функция 214 торможения с учетом выхода определяет, что целевое замедление 242 превышает максимальное целевое значение 248, функция 214 торможения с учетом выхода вводит состояние 253 невозможности выхода. Согласно этому иллюстративному примеру состояние 253 невозможности выхода задействуют, когда функция 214 торможения с учетом выхода определяет, что летательный аппарат 200 не может совершить замедления в комфортных условиях до выбранной скорости 218 перед достижением целевого местоположения 232.
[0078] Когда функция 214 торможения с учетом выхода вводит состояние 253 невозможности выхода, интерфейс 206 оператора отображает предупреждение 252 о том, что летательный аппарат 200 не может совершить замедления в комфортных условиях до выбранной скорости 218 перед достижением целевого местоположения 232. В состоянии 253 невозможности выхода функция 214 торможения с учетом выхода обеспечивает выдачу целевого замедления 242, установленного на минимальное целевое значение 250, в закон 212 управления автоматом торможения в контроллере 202 автоматической системы торможения. Закон 212 управления автоматом торможения вырабатывает выходную команду автоматического торможения для системы 120 торможения и тормозов 122 таким образом, что летательный аппарат 200 совершает замедление в комфортных условиях до выбранной скорости 218, когда местоположение 240 летательного аппарата достигает целевого местоположения 232. Когда летательный аппарат 200 достигает выбранной скорости 218, функция 214 торможения с учетом выхода вводит состояние 255 активного полета. При нахождении в состоянии 255 активного полета функция 214 торможения с учетом выхода поддерживает выбранную скорость 218 до приема сигнала вмешательства 254 пилота в управление, приводящего к отключению контроллера 202 автоматической системы торможения. Вмешательство 254 пилота в управление представляет собой любое действие, предпринимаемое оператором летательного аппарата 200, который вмешивается в управление системой 120 торможения посредством контроллера 202 автоматической системы торможения. Вмешательство 254 пилота в управление может представлять собой, например, но без ограничения, ручное управление тормозами 122, увеличение тяги двигателей, таких как двигатели 108 и 110, показанные на ФИГ. 1, и выключение функции 214 торможения с учетом выхода.
[0079] Функция 214 торможения с учетом выхода непрерывно отслеживает текущее расстояние 238 между местоположением 240 летательного аппарата и местоположением 228 конца взлетно-посадочной полосы. Если функция 214 торможения с учетом выхода определяет, что летательный аппарат 200 прошел местоположение 258 наличия запаса до конца взлетно-посадочной полосы, функция 214 торможения с учетом выхода переходит в состояние 257 остановки в конце взлетно-посадочной полосы.
[0080] При нахождении в состоянии 257 остановки в конце взлетно-посадочной полосы функция 214 торможения с учетом выхода управляет законом 212 управления скоростью и системой 120 торможения для автоматического замедления летательного аппарата 200 от выбранной скорости 218 с получением целевого замедления 242 или за пределами этого параметра таким образом, что летательный аппарат 200 выполняет остановку до выбега за конец 230 взлетно-посадочной полосы.
[0081] Функция 214 торможения с учетом выхода вычисляет текущее расстояние 256 на основании местоположения 240 летательного аппарата, полученного от системы 208 инерциальных данных. Местоположение 258 наличия запаса до конца взлетно-посадочной полосы представляет собой место, расположенное на взлетно-посадочной полосе 210, достаточно удаленное от конца 230 взлетно-посадочной полосы, выбранное таким образом, что летательный аппарат 200 замедляется до полной остановки до выбега за конец 230 взлетно-посадочной полосы. При отсутствии вмешательства 254 пилота в управление, приводящего к отключению системы 120 торможения, функция 214 торможения с учетом выхода управляет работой системы 120 торможения таким образом, что летательный аппарат 200 замедляется до полной остановки, когда летательный аппарат 200 прошел местоположение 258 наличия запаса до конца взлетно-посадочной полосы. Таким образом, функция 214 торможения с учетом выхода предотвращает непреднамеренный выбег летательного аппарата 200 за конец 230 взлетно-посадочной полосы. Во время любого состояния управления функции 214 торможения с учетом выхода, любое действие, предпринимаемое оператором летательного аппарата 200, который вмешивается в управление системой 120 торможения приводит к тому, что функция 214 торможения с учетом выхода прекращает управление системой 120 торможения. Функция 214 торможения с учетом выхода завершает работу, что обеспечивает возможность ручного управления тормозами 122. В этом иллюстративном примере действие, предпринимаемое оператором летательного аппарата 200, который вмешивается в управление системой 120 торможения, может быть вмешательством 254 пилота в управление, показанным на ФИГ. 2. Вмешательство 254 пилота в управление может представлять собой, например, но без ограничения, ручное управление тормозами 122 и увеличение тяги двигателей, таких как двигатели 108 и 110, показанные на ФИГ. 1.
[0082] На ФИГ. 5 показан пример профиля торможения возле выхода для системы автомата торможения, включающей в себя функцию торможения с учетом выхода, в соответствии с иллюстративным вариантом реализации изобретения. Профиль 500 торможения является первым примером профиля торможения, использующего функцию торможения с учетом выхода, такую как функция 214 торможения с учетом выхода, показанная в блочной форме на ФИГ. 2.
[0083] При инициировании функция 214 торможения с учетом выхода ожидает касания земли на взлетно-посадочной полосе 210. Затем функция 214 торможения с учетом выхода вводит состояние 223 готовности к работе.
[0084] В состоянии 223 готовности к работе замедление 244 происходит пассивно вследствие по меньшей мере одного такого параметра, как лобовое сопротивление летательного аппарата, использование реверсивных устройств, интерцепторов и сочетания указанного, без применения тормозов 122. При нахождении в состоянии 223 готовности к работе функция 214 торможения с учетом выхода итеративно определяет целевое замедление 242, необходимое для замедления летательного аппарата 200 до выбранной скорости 218 в целевом местоположении 232. Когда функция 214 торможения с учетом выхода определяет, что целевое замедление 242 превышает минимальное целевое значение 250, функция 214 торможения с учетом выхода вводит состояние 251 замедления.
[0085] В состоянии 251 замедления функция 214 торможения с учетом выхода управляет замедлением 244 таким образом, что скорость 236 летательного аппарата 200 достигает выбранной скорости 218 в целевом местоположении 232. При нахождении в состоянии 251 замедления, функция 214 торможения с учетом выхода итеративно определяет целевое замедление 242 и отправляет команды в закон 212 управления автоматом торможения для корректировки применения тормозов 122 посредством системы 120 торможения таким образом, что летательный аппарат 200 достигает выбранной скорости 218 в целевом местоположении 232.
[0086] В одном иллюстративном примере замедление до выбранной скорости 218 в целевом местоположении 232 позволяет избежать ошибок в вычислении и быстрых колебаний замедления по мере того, как текущее расстояние 238 между летательным аппаратом 200 и выходом 220 с взлетно-посадочной полосы приближается к нулю. Таким образом, замедление до выбранной скорости 218 в целевом местоположении 232 обеспечивает получение сглаженного профиля замедления 510 по мере того, как летательный аппарат 200 приближается к целевому местоположению 232.
[0087] Когда летательный аппарат 200 достигает выбранной скорости 218, функция 214 торможения с учетом выхода вводит состояние 255 активного полета. При нахождении в состоянии 255 активного полета функция 214 торможения с учетом выхода поддерживает выбранную скорость 218. Функция 214 торможения с учетом выхода обеспечивает поддержание летательным аппаратом 200 выбранной скорости 218 посредством, например, компенсирования любой остаточной тяги двигателей, таких как двигатели 108 и 110, показанные на ФИГ. 1.
[0088] При отсутствии вмешательства пилота в управление, такого как вмешательство 254 пилота в управление, функция 214 торможения с учетом выхода переходит в состояние 257 остановки в конце взлетно-посадочной полосы, когда летательный аппарат 200 прошел местоположение 258 наличия запаса до конца взлетно-посадочной полосы. При нахождении в состоянии 257 остановки в конце взлетно-посадочной полосы функция 214 торможения с учетом выхода автоматически замедляет летательный аппарат 200 от выбранной скорости 218 таким образом, что летательный аппарат 200 выполняет остановку перед концом 230 взлетно-посадочной полосы.
[0089] На ФИГ. 6 показан пример профиля торможения на удалении от выхода для системы автомата торможения, включающей в себя функцию торможения с учетом выхода в соответствии с иллюстративным вариантом реализации изобретения. Профиль 600 торможения является первым примером профиля торможения, использующего функцию торможения с учетом выхода, такую как функция 214 торможения с учетом выхода, показанная в блочной форме на ФИГ. 2.
[0090] При инициировании функция 214 торможения с учетом выхода ожидает касания земли на взлетно-посадочной полосе 210. Затем функция 214 торможения с учетом выхода вводит состояние 223 готовности к работе.
[0091] В состоянии 223 готовности к работе замедление 244 происходит пассивно вследствие по меньшей мере одного такого параметра, как лобовое сопротивление летательного аппарата, использование реверсивных устройств, интерцепторов и сочетания указанного, без применения тормозов 122. При нахождении в состоянии 223 готовности к работе функция 214 торможения с учетом выхода итеративно определяет целевое замедление 242, необходимое для замедления летательного аппарата 200 до выбранной скорости 218 в целевом местоположении 232. Поскольку замедление 244 происходит пассивно и его величина меньше минимального целевого значения 250, профиль 600 торможения позволяет летательному аппарату 200 воспользоваться большей длиной взлетно-посадочной полосы 210, где местоположение выхода 220 с взлетно-посадочной полосы расположено дальше от зоны касания с взлетно-посадочной полосой 210. Посредством пассивного замедления летательного аппарата 200, профиль 600 торможения уменьшает выработку тепловой энергии тормозами 122. Кроме того, поскольку летательный аппарат 200 замедляется медленнее, чем минимальное целевое значение 250, функция 214 торможения с учетом выхода уменьшает время нахождения летательного аппарата 200 на взлетно-посадочной полосе 210.
[0092] При нахождении в состоянии 223 готовности к работе функция 214 торможения с учетом выхода итеративно определяет целевое замедление 242, необходимое для замедления летательного аппарата 200 до выбранной скорости 218 в целевом местоположении 232. Когда функция 214 торможения с учетом выхода определяет, что целевое замедление 242 превышает минимальное целевое значение 250, функция 214 торможения с учетом выхода вводит состояние 251 замедления.
[0093] В состоянии 251 замедления функция 214 торможения с учетом выхода управляет замедлением 244 таким образом, что скорость 236 летательного аппарата 200 достигает выбранной скорости 218 в целевом местоположении 232. При нахождении в состоянии 251 замедления функция 214 торможения с учетом выхода итеративно определяет целевое замедление 242 и отправляет команды в закон 212 управления автоматом торможения для корректировки применения тормозов 122 посредством системы 120 торможения таким образом, что летательный аппарат 200 достигает выбранной скорости 218 в целевом местоположении 232.
[0094] Профиль 600 торможения позволяет использовать большую длину взлетно-посадочной полосы 210 посредством обеспечения того, что замедление 244 не превышает минимального целевого значения 250. Согласно профилю 600 торможения, минимальное целевое значение 250 определено на основании по меньшей мере одного такого параметра, как комфорт пассажиров, выработка тепловой энергии, время нахождения на взлетно-посадочной полосе или комбинации указанного. Согласно профилю 600 торможения, минимальное целевое значение 250 соответствует целевому замедлению 242 величиной примерно 5 фут/с2 (5 футов в секунду в квадрате или 1,52 м/с2).
[0095] В этом иллюстративном примере выбранная скорость 218 соответствует скорости руления летательного аппарата 200, и может быть скоростью по умолчанию величиной примерно 15 узлов (27,8 км/ч). Выход 220 с взлетно-посадочной полосы представляет собой место, расположенное на взлетно-посадочной полосе 210, в котором летательный аппарат 200 должен совершить выход с взлетно-посадочной полосы 210 согласно выбранному выходу 222. Затем функция 214 торможения с учетом выхода определяет целевое местоположение 232 посредством вычитания запаса 234 расстояния до выхода из местоположения 226 выхода.
[0096] В одном иллюстративном примере замедление до выбранной скорости 218 в целевом местоположении 232 позволяет избежать ошибок в вычислении и быстрых колебаний замедления по мере того, как текущее расстояние 238 между летательным аппаратом 200 и выходом 220 с взлетно-посадочной полосы приближается к нулю. Таким образом, замедление до выбранной скорости 218 в целевом местоположении 232 обеспечивает получение сглаженного профиля замедления 610 по мере того, как летательный аппарат 200 приближается к целевому местоположению 232.
[0097] Когда летательный аппарат 200 достигает выбранной скорости 218, функция 214 торможения с учетом выхода вводит состояние 255 активного полета. При нахождении в состоянии 255 активного полета функция 214 торможения с учетом выхода поддерживает выбранную скорость 218. Функция 214 торможения с учетом выхода обеспечивает поддержание летательным аппаратом 200 выбранной скорости 218 посредством, например, компенсирования любой остаточной тяги двигателей, таких как двигатели 108 и 110, показанные на ФИГ. 1.
[0098] При отсутствии вмешательства пилота в управление, такого как вмешательство 254 пилота в управление, функция 214 торможения с учетом выхода переходит в состояние 257 остановки в конце взлетно-посадочной полосы, когда летательный аппарат 200 прошел местоположение 258 наличия запаса до конца взлетно-посадочной полосы. При нахождении в состоянии 257 остановки в конце взлетно-посадочной полосы функция 214 торможения с учетом выхода автоматически замедляет летательный аппарат 200 от выбранной скорости 218 таким образом, что летательный аппарат 200 выполняет остановку перед концом 230 взлетно-посадочной полосы.
[0099] На ФИГ. 7 показан пример профиля торможения возле выхода для системы автомата торможения, включающей в себя функцию торможения с учетом выхода в соответствии с иллюстративным вариантом реализации изобретения. Профиль 700 торможения является примером профиля торможения, использующего функцию торможения с учетом выхода, такую как функция 214 торможения с учетом выхода, показанная в блочной форме на ФИГ. 2.
[00100] При инициировании функция 214 торможения с учетом выхода ожидает касания земли на взлетно-посадочной полосе 210. После этого функция 214 торможения с учетом выхода вводит состояние 223 готовности к работе.
[00101] В состоянии 223 готовности к работе замедление 244 происходит пассивно вследствие по меньшей мере одного такого параметра, как лобовое сопротивление летательного аппарата, использование реверсивных устройств, интерцепторов и сочетания указанного, без применения тормозов 122. При нахождении в состоянии 223 готовности к работе функция 214 торможения с учетом выхода итеративно определяет целевое замедление 242, необходимое для замедления летательного аппарата 200 до выбранной скорости 218 в целевом местоположении 232. Когда функция 214 торможения с учетом выхода определяет, что целевое замедление 242 превышает минимальное целевое значение 250, функция 214 торможения с учетом выхода вводит состояние 251 замедления.
[00102] В состоянии 251 замедления функция 214 торможения с учетом выхода управляет замедлением 244 таким образом, что скорость 236 летательного аппарата 200 достигает выбранной скорости 218 в целевом местоположении 232. При нахождении в состоянии 251 замедления функция 214 торможения с учетом выхода итеративно определяет целевое замедление 242 и отправляет команды в закон 212 управления автоматом торможения для корректировки применения тормозов 122 посредством системы 120 торможения таким образом, что летательный аппарат 200 достигает выбранной скорости 218 в целевом местоположении 232.
[00103] Функция 214 торможения с учетом выхода определяет, что летательный аппарат 200 не может совершить замедления до выбранной скорости 218 перед достижением целевого местоположения 232, или не может совершить замедления в комфортных условиях до выбранной скорости 218 без превышения максимального целевого значения 248 перед достижением целевого местоположения 232. Таким образом, функция 214 торможения с учетом выхода вводит состояние 253 невозможности выхода.
[00104] В состоянии 253 невозможности выхода интерфейс 206 оператора отображает предупреждение 252 о том, что летательный аппарат 200 не может совершить замедления в комфортных условиях до выбранной скорости 218 перед достижением целевого местоположения 232. В состоянии 253 невозможности выхода функция 214 торможения с учетом выхода обеспечивает выдачу целевого замедления 242, установленного на минимальное целевое значение 250, в закон 212 управления автоматом торможения в контроллере 202 автоматической системы торможения. Закон 212 управления автоматом торможения вырабатывает выходную команду автоматического торможения для системы 120 торможения и тормозов 122 таким образом, что летательный аппарат 200 совершает замедление в комфортных условиях до выбранной скорости 218, когда местоположение 240 летательного аппарата достигает целевого местоположения 232.
[00105] На ФИГ. 8 показана структурная схема процесса автоматического замедления летательного аппарата на взлетно-посадочной полосе с использованием системы управления автоматом торможения, имеющей функцию торможения с учетом выхода в соответствии с иллюстративным вариантом реализации изобретения. Процесс 800 является процессом управления торможением с учетом выхода, таким как функция 214 торможения с учетом выхода по ФИГ. 2, для контроллера автоматической системы торможения, такой как контроллер 202 автоматической системы торможения по ФИГ. 2.
[00106] Процесс 800 начинают с отслеживания скорости и положения летательного аппарата для вычисления целевого замедления (этап 802). Целевое замедление может представлять собой, например целевое замедление 242, показанное в блочной форме на ФИГ. 2.
[00107] Затем согласно процессу 800 определяют, может ли летательный аппарат совершить замедление в комфортных условиях до выбранной скорости перед достижением целевого местоположения на взлетно-посадочной полосе (этап 804). Выбранная скорость может быть, например, выбранной скоростью 218, соответствующей скорости руления летательного аппарата 200. Выбранная скорость может быть скоростью по умолчанию величиной примерно 15 узлов (27,8 км/ч). В этом иллюстративном примере согласно процессу 800 определяют целевое местоположение 232 посредством вычитания запаса 234 расстояния до выхода из местоположения 226 выхода.
[00108] В случае если определено, что летательный аппарат может совершить замедление до выбранной скорости перед достижением целевого местоположения на взлетно-посадочной полосе ("да" на этапе 804), согласно процессу 800 автоматически замедляют летательный аппарат таким образом, что летательный аппарат достигает выбранной скорости в целевом местоположении (этап 806). Посредством замедления до выбранной скорости 218 в целевом местоположении 232, процесс 800 обеспечивает получение сглаженного профиля замедления по мере того, как летательный аппарат 200 приближается к целевому местоположению 232 с уменьшением таким образом дискомфорта пассажиров, выработки тепловой энергии тормозной системой, и времени занятости взлетно-посадочной полосы летательным аппаратом.
[00109] Выполняют возврат к этапу 804, в случае если определено, что летательный аппарат не может совершить замедления до выбранной скорости перед достижением целевого местоположения на взлетно-посадочной полосе ("нет" на этапе 804), согласно процессу 800 обеспечивают выдачу предупреждения о том, что летательный аппарат не может совершить замедление до выбранной скорости перед достижением целевого местоположения (этап 808). Предупреждение может представлять собой, например, предупреждение 252, показанное в блочной форме на ФИГ. 2. Затем согласно процессу 800 автоматически замедляют летательный аппарат таким образом, что летательный аппарат достигает выбранной скорости в месте, расположенном за пределами целевого местоположения (этап 810).
[00110] Согласно процессу 800 определяют, принят ли сигнал вмешательства пилота в управление (этап 812). Вмешательство пилота в управление может представлять собой, например, вмешательство 254 пилота в управление, показанное в блочной форме на ФИГ. 2. В случае приема сигнала вмешательства пилота в управление ("да" на этапе 812), согласно процессу 800 отключают функцию торможения с учетом выхода (этап 814), после чего процесс завершают.
[00111] Выполняют возврат к этапу 812, если сигнал вмешательства пилота в управление не принят ("нет" на этапе 812), согласно процессу 800 определяют, прошел ли летательный аппарат местоположение наличия запаса до конца взлетно-посадочной полосы (этап 816). Местоположение наличия запаса до конца взлетно-посадочной полосы может представлять собой, например, местоположение 258 наличия запаса до конца взлетно-посадочной полосы, показанное в блочной форме на ФИГ. 2. Если летательный аппарат не прошел местоположение наличия запаса до конца взлетно-посадочной полосы ("нет" на этапе 816), согласно процессу 800 итеративно выполняют возврат к этапу 812.
[00112] Если летательный аппарат прошел местоположение наличия запаса до конца взлетно-посадочной полосы ("да" на этапе 816), согласно процессу 800 автоматически замедляют летательный аппарат от выбранной скорости с предпочтительным замедлением летательного аппарата таким образом, что летательный аппарат выполняет остановку до выбега за взлетно-посадочную полосу (этап 818). Затем согласно процессу 800 отключают функцию торможения с учетом выхода (этап 814), после чего процесс завершают.
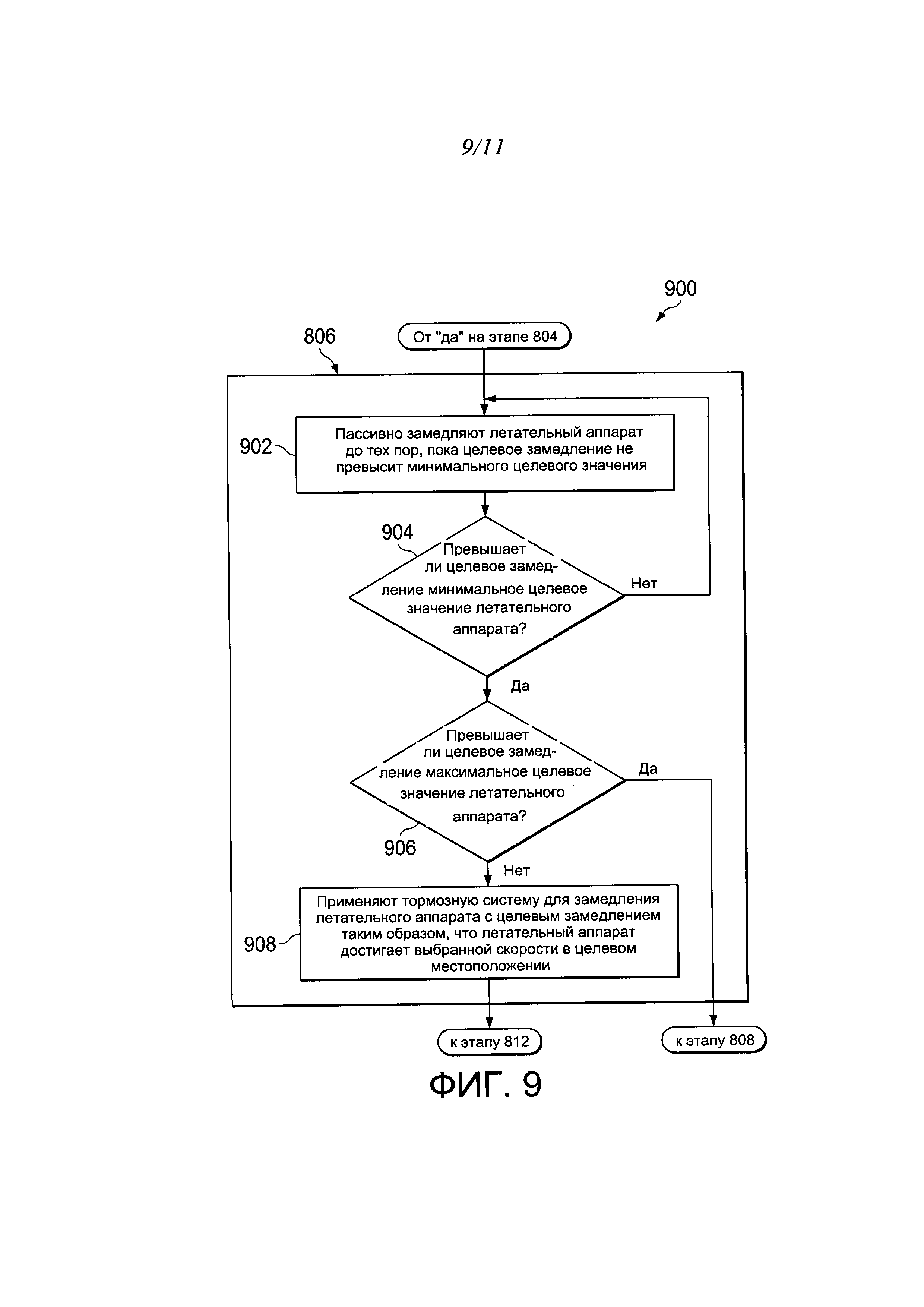
[00113] На ФИГ. 9 показана структурная схема процесса автоматического замедления летательного аппарата на взлетно-посадочной полосе с использованием системы управления автоматом торможения, имеющей функцию торможения с учетом выхода, имеющую различные состояния управления в соответствии с иллюстративным вариантом реализации изобретения. Процесс 900 представляет собой более подробную структурную схему этапов 802-806 процесса 800.
[00114] В случае если определено, что летательный аппарат может совершить замедление до выбранной скорости перед достижением целевого местоположения на взлетно-посадочной полосе, согласно процессу 900 пассивно замедляют летательный аппарат до тех пор, пока целевое замедление не превысит минимального целевого значения (этап 902). Посредством пассивного замедления летательного аппарата 200, процесс 900 позволяет летательному аппарату 200 воспользоваться большей длиной взлетно-посадочной полосы, где местоположение 226 выхода расположено дальше от зоны касания с взлетно-посадочной полосой 210. Кроме того, поскольку летательный аппарат 200 замедляется с меньшей скоростью, чем минимальное целевое значение 250, процесс 900 уменьшает время занятости взлетно-посадочной полосы летательным аппаратом 200.
[00115] Согласно процессу 900 затем определяют, превышает ли целевое замедление минимальное целевое значение летательного аппарата (этап 904). Посредством пассивного замедления летательного аппарата 200 до тех пор, пока целевое замедление не превысит минимального целевого значения, процесс 900 обеспечивает уменьшение дискомфорта пассажиров и выработки тепловой энергии тормозами 122. Если целевое замедление не превышает минимального целевого значения ("нет" на этапе 904), согласно процессу 900 итеративно выполняют возврат к этапу 902.
[00116] Если целевое замедление превышает минимальное целевое значение ("да" на этапе 904), согласно процессу 900 определяют, превышает ли целевое замедление максимальное целевое значение (этап 906). Максимальное целевое значение может представлять собой, например, максимальное целевое значение 248, показанное в блочной форме на ФИГ. 2.
[00117] Если целевое замедление превышает максимальное целевое значение ("да" на этапе 906), согласно процессу 900 применяют тормозную систему для замедления летательного аппарата с целевым замедлением таким образом, что летательный аппарат достигает выбранной скорости в целевом местоположении (этап 908). Согласно процессу 900 возобновляют процесс 800 на этапе 812 по ФИГ. 8. Если целевое замедление не превышает максимального целевого значения ("нет" на этапе 906), согласно процессу 900 возобновляют процесс 800 на этапе 812 по ФИГ. 8.
[00118] Структурные схемы и блок-схемы в различных изображенных иллюстративных вариантах реализации изобретения иллюстрируют архитектуру, функциональность и работу некоторых возможных вариантов осуществления устройств и способов в иллюстративном варианте реализации изобретения. В этом отношении, каждый блок в структурных схемах или блок-схемах может представлять модуль, сегмент, функцию и/или часть операции или этапа.
[00119] В некоторых альтернативных вариантах осуществления иллюстративного варианта реализации изобретения функция или функции, обозначенная или обозначенные в блоках, могут быть реализованы в порядке, отличном от показанного на чертежах. Например, в некоторых случаях два блока, показанные последовательно, могут быть выполнены по существу одновременно, или блоки могут иногда выполняться в обратном порядке в зависимости от задействованной функциональности. Кроме того, другие блоки могут быть добавлены в дополнение к блокам, показанным в структурной схеме или блок-схеме.
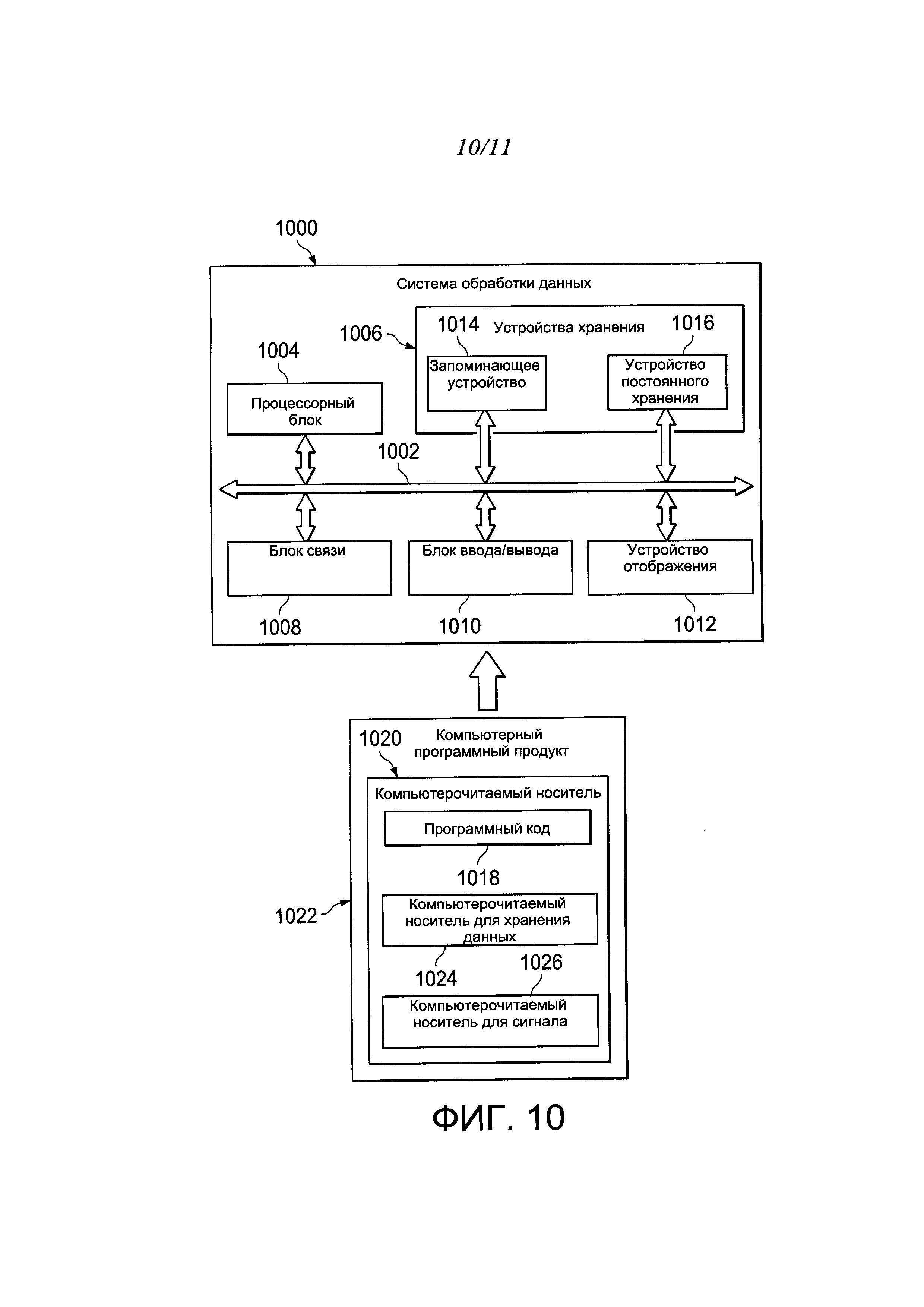
[00120] Со ссылкой на ФИГ. 10 показана иллюстрация блок-схемы системы обработки данных в соответствии с иллюстративным вариантом реализации изобретения. Система 1000 обработки данных может быть использована для реализации по меньшей мере одного из системы 221 обработки и индикации пилотажных данных и контроллера 202 автоматической системы торможения по ФИГ. 2. Система 1000 обработки данных может быть использована для обработки данных, таких как данные из системы 208 инерциальных данных по ФИГ. 2, вычисления расстояний, таких как текущее расстояние 238 и текущее расстояние 256, определения целевого замедления, такого как целевое замедление 216 по ФИГ. 2, и управления системой автоматического торможения согласно целевому замедлению, такой как система 120 торможения по ФИГ. 2. Как показано на чертежах, система 1000 обработки данных включает в себя инфраструктуру 1002 связи которая обеспечивает сообщение между процессорным блоком 1004, устройствами 1006 хранения, блоком 1008 связи, блоком 1010 ввода/вывода и устройством 1012 отображения. В некоторых случаях инфраструктура 1002 связи может быть реализована в качестве системы на основе шины.
[00121] Процессорный блок 1004 выполнен с возможностью исполнения инструкций для программного обеспечения для выполнения нескольких операций. Процессорный блок 1004 может содержать множество процессоров, мультипроцессорное ядро и/или некоторые другие типы процессора, в зависимости от конкретной реализации. В некоторых случаях процессорный блок 1004 может быть выполнен в виде аппаратного блока, такого как схемная система, специализированная интегральная схема (application specific integrated circuit, ASIC), программируемое логическое устройство или аппаратный блок какого-либо другого соответствующего типа.
[00122] Инструкции для операционной системы, приложений и/или программ, управляемых процессорным блоком 1004, могут быть расположены в устройствах 1006 хранения. Устройства 1006 хранения могут сообщаться с процессорным блоком 1004 через инфраструктуру 1002 связи. При использовании в настоящем документе, устройство хранения, также называемое компьютерочитаемым устройством хранения, представляет собой любую часть аппаратных средств, способных хранить информацию на временной и/или постоянной основе. Эта информация может включать в себя, но без ограничения, данные, программный код и/или другую информацию.
[00123] Запоминающее устройство 1014 и устройство 1016 постоянного хранения являются примерами устройств 1006 хранения. Запоминающее устройство 1014 может представлять собой, например, оперативное запоминающее устройство или любое иное подходящее энергозависимое или энергонезависимое устройство хранения. Устройство 1016 постоянного хранения может содержать любое количество компонентов или устройств. Например, устройство 1016 постоянного хранения может содержать жесткий диск, флэш-память, перезаписываемый оптический диск, перезаписываемую магнитную ленту или какую-либо комбинацию представленных выше средств. Носители, используемые устройством 1016 постоянного хранения, могут быть съемными или несъемными.
[00124] Блок 1008 связи обеспечивает сообщение системы 1000 обработки данных с другими системами и/или устройствами обработки данных. Блок 1008 связи может обеспечивать связь с использованием физических и/или проводных линий связи.
[00125] Блок 1010 ввода/вывода обеспечивает возможность приема входных сигналов от других устройств, соединенных с системой 1000 обработки данных, и выдачи выходных сигналов, подлежащих отправке в другие устройства, соединенные с системой 1000 обработки данных. Например, блок 1010 ввода/вывода может обеспечивать возможность приема входных сигналов пользователя с помощью клавиатуры, мыши и/или какого-либо иного подходящего устройства ввода. В качестве еще одного примера блок 1010 ввода/вывода может обеспечивать возможность отправки выходных сигналов на принтер, соединенный с системой 1000 обработки данных.
[00126] Устройство 1012 отображения выполнено с возможностью отображения информации пользователю. Устройство 1012 отображения хранения может содержать, например, без ограничения, монитор, сенсорный экран, лазерный дисплей, голографический дисплей, устройство виртуального экрана и/или устройство отображения какого-либо другого типа.
[00127] В этом иллюстративном примере процессы различных иллюстративных вариантов реализации изобретения могут быть выполнены процессорным блоком 1004 с использованием реализуемых компьютером инструкций. Эти инструкции могут быть отнесены к программному коду, используемому компьютером программному коду или компьютерочитаемому программному коду и могут быть считаны и исполнены одним или более процессорами в процессорном блоке 1004.
[00128] В этих примерах программный код 1018 находится в функциональной форме на компьютерочитаемом носителе 1020, который выполнен с возможностью снятия по выбору и может быть загружен или перемещен в систему 1000 обработки данных для исполнения процессорным блоком 1004. Программный код 1018 и компьютерочитаемый носитель 1020 совместно образуют компьютерный программный продукт 1022. В этом иллюстративном примере компьютерочитаемый носитель 1020 может представлять собой компьютерочитаемый носитель 1024 для хранения данных или компьютерочитаемый носитель 1026 для сигнала.
[00129] Компьютерочитаемый носитель 1024 для хранения данных является физическим или материальным устройством хранения, используемым для хранения программного кода 1018, а не средством распространения или передачи программного кода 1018. Компьютерочитаемый носитель 1024 для хранения данных может, например, без ограничения, представлять собой оптический или магнитный диск или устройство постоянного хранения, соединенное с системой 1000 обработки данных.
[00130] В качестве альтернативы, программный код 1018 может быть передан в систему 1000 обработки данных с использованием компьютерочитаемого носителя 1026 для сигнала. Компьютерочитаемый носитель 1026 для сигнала может, например, представлять собой распространяемый сигнал данных, содержащий программный код 1018. Этот сигнал данных может представлять собой электромагнитный сигнал, оптический сигнал и/или сигнал какого-либо иного типа, которые могут быть переданы по физическим и/или беспроводным линиям связи.
[00131] Иллюстрация системы 1000 обработки данных по ФИГ. 10 не предназначена для наложения архитектурных ограничений на способ, которым могут быть реализованы иллюстративные варианты реализации изобретения. Различные иллюстративные варианты реализации изобретения могут быть реализованы в системе обработки данных, которая включает в себя компоненты в дополнение к компонентам, показанным для системы 1000 обработки данных, или используемые вместо этих компонентов. Кроме того, компоненты, изображенные на ФИГ. 10, могут отличаться от приведенных иллюстративных примеров.
[00132] Иллюстративный вариант реализации раскрытия настоящего изобретения может быть описан в контексте способа 1100 изготовления и обслуживания летательного аппарата, как показано на ФИГ. 11, и летательного аппарата 1200, как показано на ФИГ. 12. Со ссылкой на ФИГ. 11 показана иллюстрация блок-схемы способа изготовления и обслуживания летательного аппарата в соответствии с иллюстративным вариантом реализации изобретения. Во время подготовки к производству способ 1100 изготовления и обслуживания летательного аппарата может включать в себя разработку спецификации и проектирование (1102) летательного аппарата 1200 по ФИГ. 12 и материально-техническое снабжение 1104.
[00133] Во время производства может иметь место изготовление 1106 компонентов и сборочных узлов и интеграция 1108 систем летательного аппарата 1200. После этого летательный аппарат 1200 может пройти этапы сертификации и доставки 1110 для ввода в эксплуатацию 1112. При эксплуатации 1112 заказчиком летательный аппарат 1200 подпадает под регламентное техобслуживание и текущий ремонт 1116, которые могут включать в себя модернизацию, перенастройку, переоборудование и иные техобслуживание и текущий ремонт.
[00134] Каждый из процессов способа 1100 изготовления и обслуживания летательного аппарата может быть выполнен или осуществлен системным интегратором, третьей стороной и/или оператором. В указанных примерах оператором может быть заказчик. Для целей настоящего описания системный интегратор может включать в себя, без ограничения, любое количество производителей летательных аппаратов и субподрядчиков по основным системам; третья сторона может включать в себя, без ограничения, любое количество продавцов, субподрядчиков и поставщиков; а оператор может представлять собой авиакомпанию, лизинговую компанию, военную организацию, обслуживающую организацию и т.д.
[00135] Со ссылкой на ФИГ. 11 показана иллюстрация блок-схемы летательного аппарата, в котором может быть реализован иллюстративный вариант реализации изобретения. В этом примере летательный аппарат 1200 изготавливают способом 1100 изготовления и обслуживания летательного аппарата по ФИГ. 11, и он может включать в себя корпус 1202 с множеством систем 1204 и внутреннюю часть 1206. Примеры систем 1204 включают в себя одну или более таких систем как движительная система 1208, система 1210 электроснабжения, гидравлическая система 1212 и система 1214 управления окружающей средой. Может быть включено любое количество других систем. Хотя показан пример, относящийся к аэрокосмической отрасли, различные иллюстративные варианты реализации изобретения могут быть применены в других отраслях промышленности, таких как автомобильная промышленность. Устройства и способы, раскрытые в настоящем документе, могут быть воплощены во время по меньшей мере одного из этапов способа 1100 изготовления и обслуживания летательного аппарата по ФИГ. 11.
[00136] Один или более иллюстративных вариантов реализации изобретения могут быть использованы во время изготовления 1106 компонентов и сборочных узлов. Например, контроллер 202 автоматической системы торможения, включающей в себя функцию 214 торможения с учетом выхода, может быть установлен во время изготовления 1106 компонентов и сборочных узлов по ФИГ. 11.
[00137] Описание различных иллюстративных вариантов реализации изобретения представлено в целях иллюстрации и описания, оно не является исчерпывающим или ограниченным вариантами реализации изобретения в раскрытой форме. Многие модификации и вариации окажутся очевидны специалистам в данной области техники. Кроме того, различные иллюстративные варианты реализации изобретения могут обеспечить различные функции по сравнению с другими иллюстративными вариантами реализации изобретения. Выбранный вариант или выбранные варианты реализации изобретения выбраны и описаны для того, чтобы наилучшим образом объяснить принципы вариантов реализации изобретения, практическое применение и дать возможность другим обычным специалистам в данной области техники понять раскрытие различных вариантов реализации изобретения с различными модификациями, которые подходят для конкретного рассматриваемого применения.
Реферат
Группа изобретений относится к системе управления автоматом торможения для управления тормозной системой с автоматическим замедлением летательного аппарата на взлетно-посадочной полосе и летательному аппарату, содержащему такую систему. Система выполнена с возможностью определения способности летательного аппарата совершить замедление до выбранной скорости перед достижением целевого местоположения на взлетно-посадочной полосе и выполнения автоматического замедления до этой скорости при наличии такой возможности. Летательный аппарат содержит систему управления автоматом торможения для управления тормозной системой с автоматическим замедлением летательного аппарата на взлетно-посадочной полосе, графический интерфейс пользователя с возможностью индикации состояния функции торможения. Обеспечивается возможность принятия решения о замедлении летательного аппарата и выполнение автоматического замедления. 2 н. и 15 з.п. ф-лы, 12 ил.
Комментарии