Система предупреждения столкновений транспортного средства и способ ее эксплуатации - RU2665208C2
Код документа: RU2665208C2
Чертежи




Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится, в целом, к системам предупреждения и предотвращения столкновения для автомобильных транспортных средств и, в частности, к регулируемому пороговому значению для начала работы системы при обнаружении опасности столкновения.
Уровень техники
Было разработано несколько различных типов систем содействия водителю, которые используют удаленное обнаружение и отслеживание других транспортных средств или объектов, которые могут приблизиться или столкнуться с оборудованным транспортным средством. Радиолокационные системы сканирования, оптические системы распознавания, использующие камеры, или сочетания данных систем обычно обнаруживают соответствующие объекты, определяют их относительную скорость и траекторию движения, а также рассчитывают вероятность и момент столкновения, которое может произойти в том случае, если транспортные средства продолжат двигаться по текущей траектории. Система содействия водителю может просто предупреждать водителя, как в случае системы предупреждения о столкновении с впереди идущим транспортным средством (FCW), позволяя водителю определять и выполнять необходимые маневры уклонения. К другим типам систем содействия водителю можно отнести, например, системы адаптивного круиз-контроля (АСС), которые могут автоматически запускать процедуру уклонения, включающую в себя снижение установленной средней скорости при обнаружении впереди идущего транспортного средства, и системы управления тормозами, которые могут прикладывать разные тормозные усилия на разные колеса для направления транспортного средства с установленной системой в сторону от возможного столкновения.
Решение о запуске процедуры по содействию водителю (включающей в себя выдачу предупреждения или автоматическое вмешательство, позволяющее избежать ожидаемого столкновения) может быть принято на основании того, насколько неизбежным является возможное столкновение. В стандартных системах FCW для определения оправданности выдачи предупреждения с точки зрения неизбежности возможного столкновения, используется пороговое значение времени до столкновения. Это пороговое значение основано на текущей скорости оборудованного транспортного средства и относительной скорости сближения с целевым объектом, который находится на траектории, ведущей к столкновению. В общем случае пороговое значение определяется с помощью расчетного времени до ожидаемого столкновения. Пороговое значение времени обычно может быть больше, когда транспортное средство движется с большей скоростью. При использовании заранее заданного порогового значения времени и относительной скорости сближения с целевым объектом аварийный сигнал будет генерироваться в тех случаях, когда целевой объект приблизится к транспортному средству на расстояние, равное относительной скорости, деленной на пороговое значение.
Величина порогового значения времени до столкновения обычно заранее определяется производителем транспортного средства таким образом, чтобы водитель с достаточной степенью вероятности смог выполнить необходимые действия по уклонению, при этом такое значение должно исключать вероятность выдачи ненужных предупреждений. Выбор порогового значения времени до столкновения зависит от различных параметров и условий движения, к которым можно отнести некоторые номинальные эксплуатационные характеристики оборудованного транспортного средства, например, характеристики торможения или управляемости, вес транспортного средства и т.д. Пороговые значения также основаны на оценке стандартных условий вождения, погодных и других переменных условий окружающей среды. В результате пороговые значения обычно обеспечивают достаточно высокую общую производительность в большинстве ситуаций. Однако изменение параметров транспортного средства по мере его износа и частые изменения погодных условий и состояния дороги влияют на время, необходимое для эффективного выполнения маневра уклонения. Например, различные параметры дорожного покрытия, зависящие от атмосферных осадков, температуры, неровности поверхности или наличия песка или гравия на поверхности дороги, могут увеличить время, необходимое для замедления или изменения направления движения транспортного средства. Такие факторы, как износ шин, также могут повлиять на поверхностное трение и возможность создания крутящего момента, необходимого для замедления или изменения направления движения транспортного средства. Таким образом, ситуация, в которой двухсекундное пороговое значение времени до столкновения будет достаточным при нормальных условиях, может быть недостаточным при особенно неблагоприятных условиях. Предпочтительным является увеличение порогового значения времени до столкновения в соответствии с текущими условиями, влияющими на маневренность транспортного средства.
Раскрытие изобретения
В одном аспекте настоящего изобретения предлагается вспомогательное устройство для транспортного средства, которое включает в себя систему содействия водителю, следящую за приближающимися объектами вокруг транспортного средства и выполненную с возможностью выполнять процедуру по содействию водителю при обнаружении опасности столкновения с приближающимся объектом в соответствии с пороговым значением времени до столкновения. Устройство контроля нагрузки обнаруживает, подсоединен ли прицеп к транспортному средству, и определяет первое поправочное значение в ответ на полученный результат, в этом случае при отсутствии прицепа первое поправочное значение будет практически равно нулю. Устройство контроля торможения определяет интенсивность торможения и результирующее изменение скорости транспортного средства, определяет ожидаемое изменение скорости транспортного средства в зависимости от интенсивности торможения, а также выбирает второе поправочное значение, зависящее от разности значений торможения при результирующем изменении скорости и ожидаемом изменении скорости. При этом второе поправочное значение будет практически равно нулю в том случае, если разность значений торможения ниже порогового значения. Устройство контроля рулевого управления определяет угол поворота транспортного средства и результирующее отклонение от курса транспортного средства, определяет ожидаемое отклонение от курса транспортного средства при этом угле поворота, а также выбирает третье поправочное значение, зависящее от разности углов поворота при результирующем отклонении от курса и ожидаемом отклонении от курса. При этом третье поправочное значение будет практически равно нулю в том случае, когда разность углов поворота ниже порогового значения. С учетом первого, второго и третьего поправочных значений корректор определяет величину порогового значения времени до столкновения.
Краткое описание чертежей
На Фиг. 1 показано оборудованное транспортное средство, отслеживающее поведение нескольких соседних целевых транспортных средств.
На Фиг. 2 показана регулируемая зона обнаружения вокруг транспортного средства, получаемая на основании переменного порогового значения времени до столкновения.
На Фиг. 3 показана схема одного предпочтительного варианта выполнения транспортного средства с системой по изобретению.
На Фиг. 4 показана блок-схема, показывающая один предпочтительный вариант осуществления способа по изобретению.
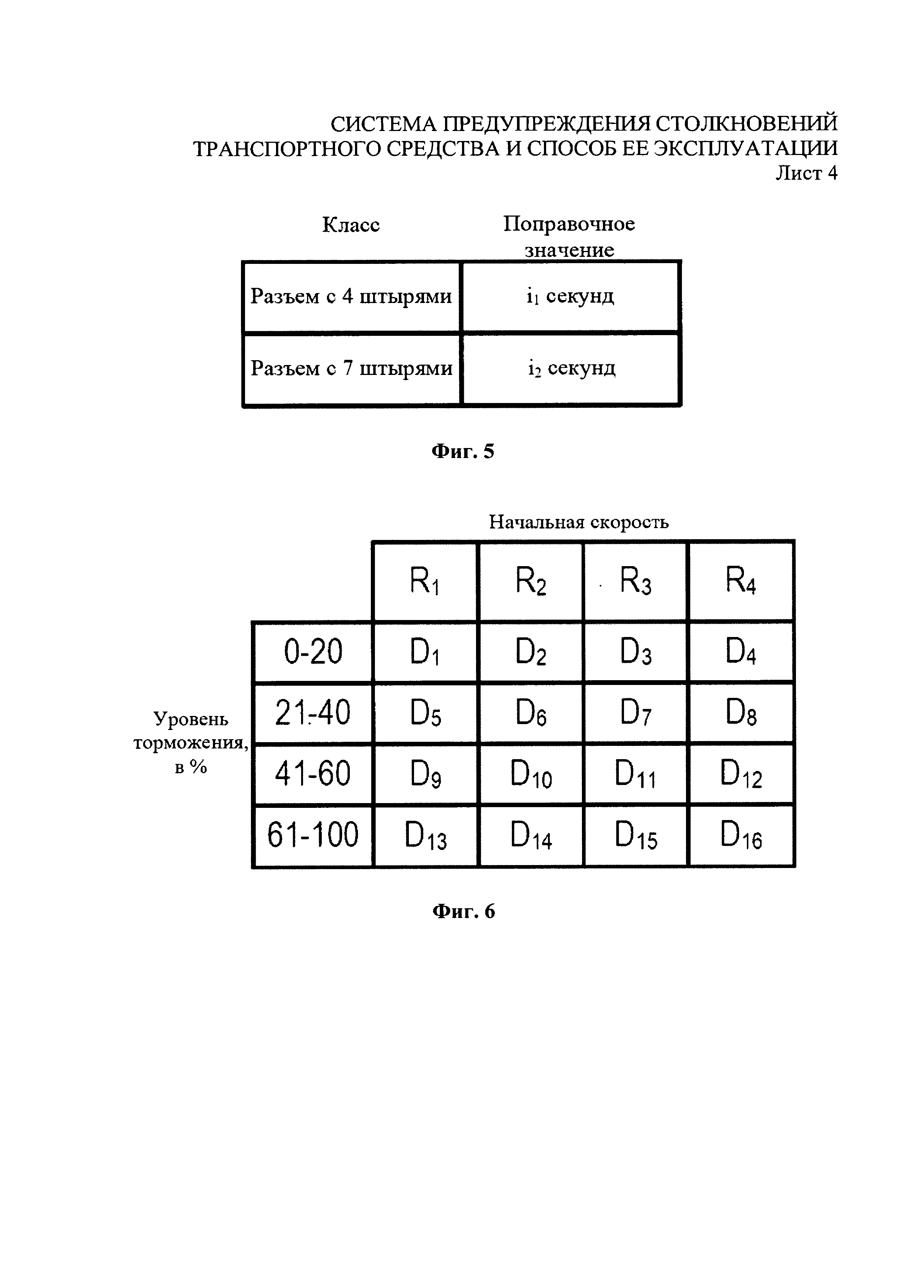
На Фиг. 5 показана справочная таблица для определения поправочного значения на основании класса прицепа, который может создавать нагрузку для оборудованного транспортного средства.
На Фиг. 6 показана справочная таблица для определения ожидаемого замедления, использующая номинальные условия движения в соответствии с различными сочетаниями следующих значений: интенсивность торможения и скорость оборудованного транспортного средства.
На Фиг. 7 показано соотношение между пороговым поправочным значением и разностью фактического замедления и ожидаемого замедления.
На Фиг. 8 показано соотношение между пороговым поправочным значением и разностью фактического отклонения от курса и ожидаемого отклонения от курса во время поворота.
Осуществление изобретения
Настоящее изобретение позволяет оценивать текущие условия движения с помощью систем и датчиков, которые обычно устанавливаются в транспортном средстве. Контролируемые параметры транспортного средства включают в себя нагрузку (например, количество пассажиров, наличие груза, наличие прицепа и т.д.) и взаимодействие транспортного средства с дорогой (например, изменения силы трения, вызванные износом шин, износом тормозов, наличием неровностей и посторонних предметов на дороге). Информация, полученная на основании данных параметров, используется для определения необходимости изменения настроек по умолчанию, например, порогового значения времени до столкновения, в системе содействия водителю (например, в системе предупреждения столкновений с впереди идущим транспортным средством, системе адаптивного круиз-контроля или системе управления с помощью тормозов).
На Фиг. 1 показано оборудованное транспортное средство 10, движущееся по многорядной дороге 11, и которое оснащено системой 12 обнаружения и отслеживания удаленных транспортных средств. В пределах зоны 13 обзора система 12 отслеживания следит за целевыми транспортными средствами 14, 15 и 16. Для каждого отслеживаемого объекта определятся набор параметров, описывающих тип и поведение каждого объекта, доступ к которому могут получить другие системы. Например, для целевого транспортного средства 14 генерируется набор 17 параметров, а для целевого транспортного средства 15 генерируется набор 18 параметров, при этом каждый набор может включать в себя расстояние до объекта, его направление движения, относительную скорость, абсолютную скорость, траекторию движения и т.д.
Транспортное средство 10 также включает в себя систему 20 содействия водителю (DAS), которая добавляет наборы 17 и 18 параметров в список объектов, принятых от системы 12 отслеживания. В зависимости от конкретной цели системы 20 содействия водителю, могут быть выполнены различные процедуры по содействию водителю, соответствующие расстоянию до относительно приближающихся целевых транспортных средств. Система 20 может контролировать такие параметры, как расстояние до целевого транспортного средства, направление, относительную скорость и/или траекторию движения, получаемые от системы 12 отслеживания для определения того, находится ли какое-либо отслеживаемое транспортное средство на траектории, ведущей к столкновению, и вычисления расчетного времени до столкновения при получении положительного ответа. Система 20 содействия может определять границы зоны обнаружения для принятия решения о необходимости выполнения процедуры по содействию водителю при обнаружении соответствующего приближающегося объекта, находящегося на траектории, ведущей к столкновению.
Как показано на Фиг. 2, зона обнаружения может определяться с точки зрения порогового значения времени до столкновения, равного времени реакции водителя или системы управления, а также других эксплуатационных характеристик. Пороговое значение 21 времени до столкновения, равное 2 секундам, создает меньшую зону обнаружения, чем пороговое значение 22 времени до столкновения, равное 3 секундам. Фактический размер зоны обнаружения зависит от относительной скорости приближения целевого объекта, который находится на траектории, ведущей к столкновению. Однако в стандартных системах содействия водителю пороговые значения времени до столкновения определялись на основании фиксированного набора условий движения, включающего в себя нагрузку на транспортное средство и взаимодействие между транспортным средством и дорогой, даже несмотря на то, что данные условия не являются постоянными.
На Фиг. 3 показано устройство транспортного средства для динамического обновления порогового значения времени до столкновения. Транспортное средство 25 включает в себя удаленную систему 26 обнаружения и отслеживания объектов, которая содержит датчик 27 (например, электронный сканирующий радиолокатор) и контроллер 28 отслеживания объектов. Информация об отслеживаемых объектах передается в систему 30 содействия водителю, которая следит за объектами и может запустить процедуру по содействию водителю с помощью исполнительного механизма 31.
В одном варианте реализации система 30 DAS может включать в себя систему предупреждения столкновения с впереди идущим транспортным средством (FCW), в которой исполнительный механизм 31 представляет собой генератор воспринимаемых предупреждений, например, динамик, генерирующий предупреждающие звуки, или устройство отображения для создания мигающих индикаторов или отображения предупреждений. Воспринимаемый предупреждающий сигнал сообщает водителю о прогнозируемом столкновении таким образом, чтобы водитель мог предпринять действия по уклонению. В качестве альтернативы система 30 DAS может включать в себя систему адаптивного круиз-контроля (АСС), в которой действия по содействию выполняются с помощью исполнительного механизма 31 и могут включать в себя снижение заданной скорости, устанавливаемой системой АСС, что позволит предотвратить столкновение с целевым транспортным средством, обнаруженным на полосе, по которой движется оборудованное транспортное средство. При необходимости система АСС также может генерировать воспринимаемый предупреждающий сигнал. В еще одном варианте система 30 DAS может включать в себя систему управления тормозами для применения разной тормозной силы на каждое колесо, чтобы изменить траекторию движения транспортного средства и избежать спрогнозированного столкновения.
Каждый тип системы содействия водителю может использовать зоны обнаружения различных размеров, соответствующих выполняемым ими функциям. Однако раньше в каждом случае конкретные пороговые значения не учитывали изменяемость условий движения, которые могли негативно влиять на маневренность, для изменения скорости или направления движения транспортного средства с целью предотвращения возможного столкновения. Следовательно, транспортное средство 25 использует модуль 35 обновления для контроля различных аспектов условий движения и обновления порогового значения времени до столкновения, используемого системой 30 DAS. В представленном варианте значения порогового значения времени до столкновения, определяемые традиционным способом, включают в себя значения по умолчанию, хранящиеся на запоминающем устройстве 36. Значения по умолчанию передаются на корректирующий блок 37, который получает различные поправочные значения (т.е. приращения), описанные ниже, которые прибавляются к значению по умолчанию и выдаются системе 30 DAS в виде скорректированного значения. Каждый отдельный аспект условий движения, описанный ниже, представляет собой ухудшение или снижение маневренности транспортного средства. Таким образом, каждое из них позволяет определить увеличивающее поправочное значение, которое нужно прибавить к исходному пороговому значению для увеличения порогового значения времени и, следовательно, для увеличения соответствующей зоны обнаружения (при пересечении границ которой будет запускаться процедура по содействию водителю). Аналогичным образом эти приращения пересматриваются или обнуляются при изменении состояния транспортного средства (например, при замене изношенных шин) или условий движения.
Первый аспект условий движения представляет собой нагрузку транспортного средства (т.е. массу, перевозимую транспортным средством). Устройство 40 контроля нагрузки может оценивать различные аспекты нагрузки, включая проверку наличия прицепа 41 у транспортного средства 25. Подобное обнаружение может быть выполнено путем отслеживания состояния разъема 42 для прицепа. Таким образом, при использовании прицепа 41 для определения его наличия может быть проверена целостность электрической цепи в разъеме 42 для прицепа. Кроме того, устройство 40 контроля нагрузки может различными способами определять класс или размер подсоединенного прицепа, например, с помощью идентификации типа разъема (например, разъем с четырьмя штырями будет соответствовать небольшим прицепам, а разъем с семью штырями будет соответствовать большим прицепам). Если прицеп не будет обнаружен, то поправочное значение, выдаваемое устройством 40 контроля нагрузки для корректирующего блока 37, будет практически равно нулю.
Модуль 35 обновления также включает в себя устройство 43 контроля торможения, которое отслеживает тормозные характеристики таким образом, чтобы обнаруживать любое отклонение от номинальных тормозных характеристик, которые являются основой для значений по умолчанию. Устройство 43 контроля торможения определяет интенсивность торможения с помощью одного или нескольких датчиков 44, например, с помощью датчика положения педали тормоза для индикации величины перемещения педали тормоза. Устройство 43 контроля торможения также определяет изменение скорости транспортного средства в случае торможения с учетом определенной интенсивности торможения. Устройство 43 может быть подключено к блоку 45 управления трансмиссией (РСМ) для определения любых необходимых значений параметров, касающихся скорости транспортного средства. Изменения, относящиеся к скорости, могут, например, представлять собой величину замедления, фактическое снижение скорости или расстояние, пройденное за определенный промежуток времени. Устройство 43 также определяет ожидаемое изменение параметра, относящегося к скорости транспортного средства, которое произойдет при номинальных условиях движения. Устройство 43 контроля торможения определяет разность между фактическим и ожидаемым значением параметра, относящегося к скорости, и выбирает пороговое поправочное значение (т.е. приращение) на основании полученной разности. Предпочтительно, чтобы поправочное значение было практически равно нулю, если разность значений торможения ниже заранее заданного порогового значения разности торможения. При превышении данного значения к пороговому значению времени до столкновения добавляется большее поправочное значение в соответствии с монотонно возрастающей функцией, сохраненной на устройстве 43 контроля торможения.
Модуль 35 обновления также включает в себя устройство 46 контроля рулевого управления, которое реагирует на любые условия движения, негативно влияющие на способность транспортного средства избежать возможного столкновения. Устройство 46 контроля рулевого управления определяет угол поворота транспортного средства путем подключения к одному или нескольким датчикам 47, например, к датчику угла поворота рулевого колеса. Устройство 46 контроля рулевого управления также определяет результирующее отклонение от курса транспортного средства (т.е. поперечное ускорение, получаемое из значения угла поворота, под действием которого транспортное средство отклоняется в сторону). Устройство 46 контроля рулевого управления также определяет ожидаемое отклонение от курса транспортного средства в соответствии с полученным углом поворота и другими параметрами, например, в соответствии с текущей скоростью транспортного средства. Сигналы со значениями отклонения от курса могут быть получены от блока 45 РСМ или непосредственно от датчика угла рыскания, относящегося к датчикам 47. Устройство 46 контроля рулевого управления выбирает поправочное значение в зависимости от разности между измеренным отклонением от курса и ожидаемым. Если разность углов поворота ниже порогового значения, то поправочное значение будет практически равно нулю. При разности значений, превышающей пороговое значение, на корректирующий блок 37 поступает монотонно увеличивающееся поправочное значение.
Модуль 35 обновления также включает в себя устройство 48 контроля тягового усилия, подключенного к блоку 45 РСМ, и/или дополнительные датчики для определения скоростей колес по крайней мере на одном приводном колесе и по крайней мере на одном неприводном колесе. Устройство 48 контроля тягового усилия определяет рассогласованность между скоростью приводного колеса и скоростью неприводного колеса. Оно также определяет крутящий момент, передаваемый на приводное колесо, для определения ожидаемого рассогласования. Подаваемый крутящий момент предпочтительно можно получить от блока 45 РСМ. Устройство 48 контроля тягового усилия выбирает поправочное значение на основании разности между обнаруженным и ожидаемым рассогласованием между скоростями колес. Если эта разность ниже порогового значения, то поправочное значение будет практически равно нулю. В случае превышения порогового значения на корректирующий блок 37 подается монотонно увеличивающееся поправочное значение.
В предпочтительном варианте осуществления корректирующий блок 37 генерирует сумму номинального порогового значения, полученного от устройства 36 хранения значений по умолчанию, и поправочных значений, полученных от устройства 40 контроля нагрузки, устройства 43 контроля торможения, устройства 46 контроля рулевого управления и устройства 48 контроля тягового усилия. В качестве альтернативы корректирующий блок 37 может напрямую принимать от каждого устройства контроля значения разности между фактическими эксплуатационными характеристиками и ожидаемыми эксплуатационными характеристиками и использовать их для определения соответствующего порогового значения времени до столкновения с помощью модели, содержащей значения по умолчанию.
Предпочтительный пример способа по изобретению представлен на Фиг. 4. На этапе 50 процедура обновления порогового значения инициируется, используя пороговое значение времени до столкновения по умолчанию. Затем процесс периодически выполняет корректировку порогового значения в соответствии с изменениями условий во время движения транспортного средства. На этапе 51 выполняется проверка, позволяющая определить наличие прицепа. Если он есть, то на этапе 52 на основании класса прицепа выбирается поправочное значение. При отсутствии дополнительной нагрузки (т.е. при отсутствии обнаруженного прицепа) способ переходит к следующему аспекту условий движения. В данном случае на этапе 53 выполняется проверка, позволяющая определить, тормозит ли транспортное средство. Если транспортное средство во время выполнения текущего процесса не тормозит, то на этапе 57 проверяется следующий аспект. Если транспортное средство тормозит, то на этапе 54 определяется уровень или интенсивность торможения, а на этапе 55 измеряется итоговое изменение скорости. На этапе 56 интенсивность торможения используется для определения ожидаемого изменения скорости, а разность между измеренным и ожидаемым изменениями скорости используется для выбора поправочного значения, увеличивающего пороговое значение времени до столкновения.
На этапе 57 выполняется проверка, поворачивает ли в данный момент транспортное средство. Если да, то на этапе 58 измеряется угол поворота, а на этапе 60 рассчитывается итоговое отклонение от курса. На этапе 61 на основании угла поворота и других параметров, например, скорости транспортного средства, определяется ожидаемое отклонение от прямого курса для номинальных условий движения, а разность между измеренным и ожидаемым отклонением от курса используется для выбора поправочного значения. На этапе 62 выполняется проверка для определения того, движется ли транспортное средство (т.е. управляется посредством передачи крутящего момента на колеса). Если да, то на этапе 63 измеряются скорости каждого отдельного колеса и получается передаваемый крутящий момент. На основании ожидаемых значений разности между скоростями приводного и неприводного колеса при передаваемом крутящем моменте на этапе 64 выбирается поправочное значение.
На этапе 65 к значениям по умолчанию добавляется каждое из поправочных значений, полученное от различных устройств контроля. Если результирующее пороговое значение времени до столкновения изменилось по сравнению со значением, используемым ранее, то на этапе 66 происходит необходимое обновление значений системы содействия водителю.
На Фиг. 5 представлена таблица, которая может быть сохранена на устройстве контроля нагрузки для сопоставления обнаруженного разъема для прицепа и изменения соответствующего поправочного значения. Таким образом, для небольшого прицепа, имеющего разъем с четырьмя штырями, предусмотрено поправочное значение, равное i1 секунд, а для большого прицепа, имеющего разъем с семью штырями, предусмотрено поправочное значение, равное i2 секунд.
На Фиг. 6 показана таблица, хранящаяся на устройстве контроля торможения, которая может быть использована для определения ожидаемого изменения параметров, относящихся к скорости. Таким образом, в строках таблицы указаны соответствующие диапазоны интенсивности или уровней торможения (в виде процента от максимальной величины торможения). В столбцах таблицы указаны соответствующие диапазоны R1-R4 для начальной скорости транспортного средства. В ячейках таблицы указаны соответствующие значения D1-D16 для ожидаемого замедления или снижения скорости. Данные значения могут быть откалиброваны производителем транспортного средства заранее путем измерения величин снижения скорости или замедления, полученных при номинальных условиях за счет использования соответствующих значений интенсивности торможения при предварительно установленных диапазонах начальной скорости. После получения разности между ожидаемым замедлением из соответствующей ячейки и измеренным замедлением данная разность используется для получения поправочного значения с помощью функции преобразования, представленной на Фиг. 7. При уровнях ниже порогового значения 70 торможения функция 71 преобразования может иметь нулевое значение на участке 72. По мере увеличения разности значений торможения поправочное значение увеличивается на участке 73 до тех пор, пока на участке 74 не будет достигнуто максимальное значение. Уклон и/или форма функции 71 преобразования индивидуальна для каждого транспортного средства и может изменяться в зависимости от различных параметров конструкции транспортного средства, однако предпочтительно, чтобы она монотонно увеличивалась от нулевого до максимального значения.
На Фиг. 8 показан другой пример функции преобразования, в которой разность значений отклонения от курса (рыскания) используется для генерирования поправочного значения, имеющего нулевое значение до порогового значения 75, после которого она монотонно увеличивается до максимального значения.
За счет того что пороговое значение времени до столкновения, используемое системой содействия водителю, основано на фактических условиях движения транспортного средства и использовании транспортного средства, настоящее изобретение обеспечивает своевременное уведомление водителя таким образом, чтобы он успел среагировать на возникновение опасности столкновения и ему было проще его избежать.
Реферат
Предложена система содействия водителю для автомобильного транспортного средства, которая следит за приближающимися объектами вокруг транспортного средства и выполняет процедуру по содействию водителю при обнаружении опасности столкновения с приближающимся объектом в соответствии с пороговым значением времени до столкновения. Пороговое значение времени до столкновения включает в себя номинальное значение или значение по умолчанию, которое корректируется в соответствии с несколькими измеряемыми параметрами транспортного средства и условиями движения. Соответствующие поправочные значения, полученные с помощью устройства контроля нагрузки, устройства контроля торможения и устройства контроля рулевого управления, прибавляют к пороговому значению, если измеренные эксплуатационные параметры транспортного средства отличаются от ожидаемых значений. Процедура по содействию водителю может предусматривать подачу воспринимаемого предупреждения для предупреждения столкновений с впереди идущим транспортным средством, снижение скорости при использовании системы адаптивного круиз-контроля или включение тормозов при использовании системы управления тормозами. Повышается безопасность движения. 2 н. и 8 з.п. ф-лы, 8 ил.
Комментарии