Нанометрическое позиционирующее устройство - RU2233736C2
Код документа: RU2233736C2
Чертежи
Описание
Изобретение относится к области машиностроения, а именно к прецизионным позиционирующим средствам, и может быть широко использовано, например, в прецизионных станках, высокоточных копирующих устройствах, а также в фотолитографических комплексах для электронной промышленности и иных областях техники, преимущественно, для обеспечения дискретности (шага) позиционирования объекта в нанометровом диапазоне при возможности обеспечения общего перемещения этого объекта (относительно базовой системы координат) на базе (в плане), по меньшей мере, 160× 160 мм2.
В настоящее время существуют различного рода микропозиционирующие устройства, в основном, основанные на использовании прецизионных линейных двигателей (разработки фирм ASM Lithography, Canon, Nikon, Планар) или пьезокерамических актюаторов (разработки фирм Burleigh, Toshiba, Physik Instrumente). Микропозиционеры первой группы позволяют достигнуть контролируемой точности позиционирования 35 нм, а микропозиционеры второй группы - 10 нм. К сожалению, в обеих группах устройств практически достигнута предельная точность позиционирования, что ограничивает дальнейший прогресс в развитии микроэлектроники, оптики, точной механики, прецизионного машиностроения, микро-, робототехнологий и т.д. Кроме того, дальнейшее повышение точности пьезокерамических позиционеров требует радикального улучшения уровня стабилизации используемого высокого напряжения питания и устранения микродефектов в пьезокерамике, получаемой спеканием. Наконец, диапазон перемещения и развиваемые при перемещении усилия в ряде случаев оказываются заметно ниже тех требований, которые возникают в таких быстро развивающихся отраслях как молекулярная биология, микроэлектроника, оптика и, конечно, прецизионное станкостроение.
Из уровня техники известен магнитомеханический преобразователь (нанометрический винт, сформированный на основе магнитострикционного преобразователя), включающий корпус и ступень точного позиционирования, содержащую установленный с возможностью возвратно-поступательного перемещения относительно корпуса исполнительный элемент, по меньшей мере, часть которого выполнена из магнитострикционного материала, и источник магнитного поля, выполненный в виде, по меньшей мере, одного постоянного магнита, установленного в зоне той, по меньшей мере, одной части исполнительного элемента, которая выполнена из магнитострикционного материала, с возможностью перемещения относительно последней (RU 2075797, 1997 г.).
Основным недостатком данного известного из уровня техники нанометрического устройства для позиционирования перемещаемого объекта является ограниченный диапазон перемещения упомянутого объекта с той точностью перемещения (дискретностью шага перемещения), которую позволяет обеспечить вышеуказанное известное из уровня техники устройство.
Наиболее близким по отношению к заявленному техническому решению является известное из уровня техники нанометрическое позиционирующее устройство, включающее неподвижный базовый элемент, на котором установлены с возможностью возвратно-поступательного перемещения относительно базового элемента и одна относительно другой ступени грубого и точного позиционирования объекта, при этом ступень грубого позиционирования кинематически связана с базовым элементом и ступенью точного позиционирования с возможностью обеспечения синхронного перемещения обеих ступеней относительно базового элемента в процессе грубого позиционирования объекта, а кинематическая связь упомянутых ступеней между собой осуществлена с возможностью автономного перемещения подвижного элемента ступени точного позиционирования относительно ступени грубого позиционирования и соответственно базового элемента в процессе точного позиционирования объекта (RU 20163 U, 2001 г.).
Основным недостатком данного известного из уровня техники нанометрического устройства для позиционирования перемещаемого объекта является ограниченный диапазон перемещения упомянутого объекта с той точностью перемещения (дискретностью шага перемещения), которую позволяет обеспечить вышеуказанное, известное из уровня техники устройство. Кроме того, данное известное из уровня техники устройство обладает ограниченными эксплуатационными возможностями ввиду того, что обеспечивает позиционирование объекта лишь по одной из осей координат, а также не содержит соответствующих контрольно-измерительных средств соответствующей точности измерения в заданном диапазоне перемещения объекта.
В основу заявленного изобретения была положена задача создания такого устройства для позиционирования перемещаемого объекта относительно базовой системы координат, которое обеспечивало бы (при перемещении упомянутого объекта на заданное /не менее 160 мм/ расстояние) возможность позиционирования этого объекта с нанометрической точностью по двум координатам, то есть обеспечивало бы шаг (дискретность) позиционирования перемещаемого объекта на заданное расстояние (относительно базовой системы координат) в нанометровом диапазоне, что в значительной степени повышает достоверность результатов известных из уровня техники методов и средств измерения при контрольных замерах положения, перемещаемого (подвижного) объекта исследования, а также расширяет эксплуатационные возможности устройства.
Поставленная задача обеспечивается тем, что в нанометрическом позиционирующем устройстве, содержащем неподвижный базовый элемент, на котором установлена с возможностью возвратно-поступательного перемещения относительно базового элемента ступень грубого позиционирования, на последней установлена с возможностью возвратно-поступательного перемещения относительно ступени грубого позиционирования ступень точного позиционирования с установочным элементом, ступень грубого позиционирования кинематически связана с базовым элементом и ступенью точного позиционирования с возможностью обеспечения перемещения обеих ступеней относительно базового элемента, а кинематическая связь упомянутых ступеней позиционирования между собой осуществлена с возможностью автономного перемещения установочного элемента ступени точного позиционирования относительно ступени грубого позиционирования и соответственно базового элемента, при этом ступени грубого и точного позиционирования установлены с возможностью упомянутого перемещения по двум осям координат, ступень грубого позиционирования выполнена в виде жесткой опорной плиты, на которой жестко закреплена рамка, внутри которой расположен установочный элемент ступени точного позиционирования, имеющего возможность перемещения и фиксации в заданном положении посредством попарно установленных на каждой стороне упомянутой рамки ступени грубого позиционирования позиционирующих элементов нанометрического диапазона, причем ступень грубого позиционирования выполнена обеспечивающей заданное перемещение с погрешностями меньшими, чем диапазон перемещения ступени точного позиционирования по каждой из двух упомянутых осей координат.
Оптимально позиционирующие элементы ступени точного позиционирования выполнять в виде магнитострикционных преобразователей, которые содержат средства создания и изменения параметров магнитного поля. Последние могут быть выполнены в виде постоянных магнитов. Возможно также выполнение средств создания и изменения параметров магнитного поля в виде катушек.
Кинематическая связь ступени грубого позиционирования с базовым элементом может быть выполнена в виде, по меньшей мере, двух прецизионных линейных двигателей, расположенных на базовом элементе с возможностью перемещения жесткой опорной плиты ступени грубого позиционирования вдоль соответствующих осей координат.
Нанометрическое позиционирующее устройство может быть снабжено средствами, обеспечивающими перемещение жесткой опорной плиты ступени грубого позиционирования на воздушной подушке.
Базовый элемент может быть снабжен средствами фиксации ступени грубого позиционирования, выполненными в виде системы вакуумного присоса.
Нанометрическое позиционирующее устройство также может быть снабжено измерительной системой контроля положения позиционируемого объекта, включающей, по меньшей мере, три контрольно-измерительных средства с точностью измерения не ниже точности позиционирования упомянутых позиционирующих элементов нанометрического диапазона ступени точного позиционирования, при этом одно из упомянутых измерительных средств размещено с возможностью осуществления линейного контроля положения позиционируемого объекта по одной из осей координат, а остальные - с возможностью осуществления линейно-полярного контроля, относительно другой ортогональной вышеупомянутой оси координат в плоскости базового элемента.
Нанометрическое позиционирующее устройство может быть снабжено и системой управления позиционирующими элементами, обеспечивающими перемещение установочного элемента ступени точного позиционирования на заданное расстояние, связанной с измерительной системой контроля положения позиционируемого объекта.
Целесообразно контрольно-измерительные средства измерительной системы контроля положения объекта выполнять в виде лазерных гетеродинных интерферометров и/или емкостных датчиков девиации положения ступеней относительно плоскости базового элемента.
Изобретение иллюстрируется графическими материалами.
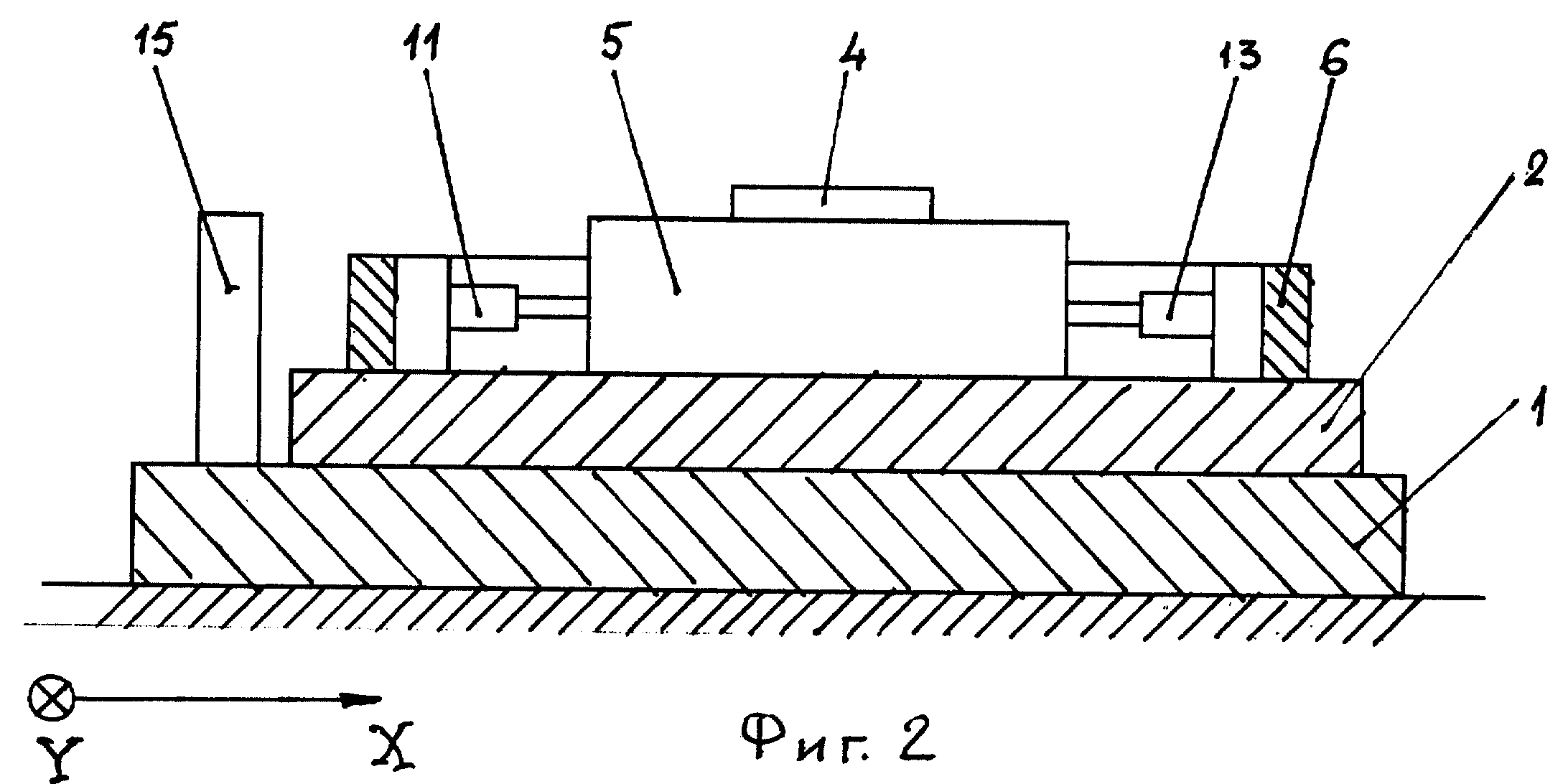
На фиг.1 показана схема нанометрического позиционирующего устройства (в плане); на фиг.2 - сечение А-А по фиг.1.
Нанометрическое позиционирующее устройство содержит неподвижный базовый элемент 1, на котором установлены с возможностью возвратно-поступательного перемещения (относительно базового элемента 1 и одна относительно другой) ступени 2 и 3, соответственно, грубого и точного позиционирования объекта 4. Ступень 2 грубого позиционирования кинематически связана с базовым элементом 1 и ступенью 3 точного позиционирования с возможностью обеспечения синхронного перемещения обеих ступеней 2 и 3 относительно базового элемента 1 (в процессе грубого позиционирования объекта 4). Кинематическая связь упомянутых ступеней 2 и 3 между собой осуществлена с возможностью автономного перемещения подвижного установочного элемента 5 (предназначенного для размещения позиционируемого объекта 4) ступени 3 точного позиционирования относительно ступени 2 грубого позиционирования и соответственно базового элемента 1 (в процессе точного позиционирования объекта 4). Ступени 2 и 3, соответственно, грубого и точного позиционирования установлены с возможностью возвратно-поступательного перемещения относительно базового элемента 1 и одна относительно другой по двум осям X и Y координат. Ступень 2 грубого позиционирования выполнена в виде жесткой опорной плиты, на которой жестко закреплена прямоугольная рамка. 6. Кинематическая связь ступени 2 грубого позиционирования с базовым элементом 1 осуществлена посредством, по меньшей мере, двух линейных двигателей (на чертежах условно не показанных), которые расположены с возможностью перемещения опорной плиты вдоль соответствующих осей координат. Данное перемещение (т.е. перемещение опорной плиты в процессе грубого позиционирования объекта 4) осуществляется на воздушной подушке. Базовый элемент 1 может быть снабжен средствами фиксации ступени грубого позиционирования (после завершения процесса грубого позиционирования), которые, как правило, выполнены в виде системы вакуумного присоса.
Ступень 3 точного позиционирования выполнена в виде установленного внутри жестко закрепленной на упомянутой опорной плите прямоугольной рамки 6 подвижного установочного элемента 5. Установочный элемент 5 перемещается и фиксируется в заданном положении посредством попарно установленных на каждой стороне прямоугольной рамки 6 позиционирующих элементов 7, 8, 9, 10, 11, 12, 13, 14 нанометрического диапазона перемещений. Кроме того, устройство снабжено измерительной системой контроля положения объекта 4, включающей, по меньшей мере, три измерительных средства 15, 16, 17 с точностью измерения не ниже точности позиционирования упомянутых позиционирующих элементов 7, 8, 9, 10, 11, 12, 13, 14 ступени 3 точного позиционирования. При этом одно измерительное средство 15 размещено с возможностью осуществления контроля положения объекта 4 по одной из осей (в частности X) координат, а остальные 16 и 17 - по другой оси (в частности Y) координат.
Позиционирующие элементы 7, 8, 9, 10, 11, 12, 13, 14 ступени 3 точного позиционирования могут быть выполнены различного типа, но, преимущественно, в виде магнитострикционных (магнитомеханических) преобразователей, средства создания и изменения магнитного поля которых выполнены в виде постоянных магнитов. Необходимо отметить, что особенностью используемых в заявленном устройстве магнитострикционных (магнитомеханических) преобразователей является то, что в качестве силового элемента (средства перемещения исполнительного элемента) используется стержень из материала с гигантской магнитострикцией (магнитостриктор), который помещен в магнитное поле магнитной системы, сформированной из постоянных магнитов. При изменении (по величине и/или направлению) напряженности магнитного поля магнитной системы происходит изменение линейных размеров магнитостриктора. По сравнению с широко известными магнитострикционными преобразователями (в которых магнитное поле генерируется посредством соленоида) использование в качестве источника магнитного поля постоянных магнитов позволяет в значительной мере сократить энергопотребление в рассматриваемом магнитомеханическом преобразователе, устранить его нагрев, повысить временную стабильность положения исполнительного элемента, во многих случаях обойтись без источника электропитания и, как следствие, получить позиционирующие устройства со следующими эксплуатационными параметрами:
- минимальный шаг перемещения (позиционирования) - 0,01 нм;
- диапазон перемещения - до 1000 мм;
- динамический диапазон - 1011;
- усилие на исполнительном органе при его перемещении - 104;
- потребляемая при работе привода мощность - до 5 Вт;
- отсутствие энергопотребления при фиксации положения исполнительного элемента.
Измерительные средства 15, 16, 17 измерительной системы контроля положения объекта 4 могут быть выполнены, преимущественно, в виде лазерных гетеродинных интерферометров, а также не исключается возможность использования в ней (для устранения продольных девиаций) устройства емкостного типа для измерения перекоса ступени (т.е. разности расстояний концов опорной линейки ступени от реперных поверхностей).
Необходимо учитывать, что создание измерительной системы контроля положения объекта 4 (позволяющей обеспечить измерение координат ступени 3 точного позиционирования в динамическом диапазоне ~108). Необходимую точность измерения можно получить лишь с помощью лазерных интерферометрических измерителей перемещения. Лазерный интерферометр измерения перемещений - это линейная измерительная система для абсолютных измерений длины путем сравнения ее с длиной волны стабилизированного по частоте лазера. В самых общих чертах принцип работы лазерного интерферометра измерения перемещений состоит в том, что один из его отражателей закрепляется на перемещаемом объекте. При движении объекта меняется разность фаз интерферирующих пучков, что приводит к характерной периодической модуляции амплитуды светового потока на выходе интерферометра. Период наблюдаемой интерференционной картины равен в точности половине длины волны излучения используемого лазера. Таким образом, измерение перемещения с помощью интерферометра сводится к подсчету целого числа пройденных интерференционных полос и определению дробной части порядка. Таким образом, система контроля позиционирования должна состоять из двух измерителей перемещения. Один измеритель, работающий либо по принципу интерферометра без переноса спектра сигнала, либо как высокоточная стандартная измерительная линейка, измеряет целое число порядков интерференции. Второй интерферометр (гетеродинный) измеряет дробную часть порядка.
В заявленном устройстве (наностоле) позиционирование (перемещение) осуществляется с помощью двух ступеней - ступени 2 грубого позиционирования и расположенной на ней ступени 3 точного позиционирования. Одним из существенных вопросов при перемещении установочного подвижного элемента 5 ступени 3 точного позиционирования является вопрос продольной девиации этой ступени 3 при ее движении вдоль каждой из осей координат X, Y. Поэтому предполагается положение ступени 3 точного позиционирования по поперечным пространственным координатам контролировать емкостными датчиками с системой обратной связи с отклонением от прямолинейности перемещения не более 50 нм и с воспроизводимостью положения - 2,5 нм, а по продольной - интерферометрическим измерителем дробной части порядка с точностью не хуже, чем 3 нм. Предполагается также, что все устройство будет работать либо в вакууме, либо будет обеспечено постоянство показателя преломления атмосферы с точностью 10-8.
Эффективным методом устранения возможных продольных девиаций ступеней 2 и 3 заявленного устройства является использование устройства емкостного типа для измерения перекоса ступени - разности расстояний концов опорной линейки ступени от реперных поверхностей. Емкостный метод измерения разности расстояний обеспечивает измерение малых расстояний с высокой точностью.
Преобразователь “разность расстояний - емкость” должен содержать две электропроводящие поверхности, закрепленные на неподвижной реперной поверхности и удаленные от этой поверхности (например, с помощью диэлектрической прокладки) на расстояние порядка 1 мм, а также опорную поверхность шириной и длиной больше расстояния между указанными выше реперными проводящими поверхностями, расположенными на выбранной направляющей.
Таким образом, формируется пара конденсаторов, образованных электропроводящей поверхностью опорной линейки с одной стороны и реперными поверхностями с другой. Причем информационным параметром является расстояние между этими поверхностями. При перекосе опорной линейки эти расстояния изменяются по-разному, что должно приводить к появлению сигнала перекоса с учетом его знака.
Наиболее приемлемым методом преобразования электрической емкости в напряжение может быть мостовой трансформаторный метод измерения емкости с тесной взаимно индуктивной связью между измерительными плечами. В этом случае точность измерений обеспечивается стабильностью коэффициента трансформации между плечевыми обмотками, а этот параметр зависит только от отношения чисел витков в обмотках и, следовательно, никак не может измениться под влиянием внешних условий.
Наиболее целесообразным режимом работы трансформаторной измерительной цепи является резонансный режим. При этом:
- повышается коэффициент преобразования моста в величину добротности раз;
- улучшается устойчивость к электромагнитным помехам за счет частотной избирательности резонансного режима.
Применение резонансной измерительной цепи обусловливает использование преобразователя переменного напряжения в постоянное в синхронном режиме работы - амплитудного синхронного фазочувствительного детектора. При этом существенно улучшаются метрологические характеристики измерительной цепи, прежде всего, линейность характеристики преобразования. Кроме того, улучшается устойчивость к воздействию внешних неблагоприятных факторов, например, утечек тока по поверхностям изоляторов за счет подавления активной составляющей проводимости измерительной цепи, а также помехоустойчивость.
Рабочая частота генератора, в этом случае, поддерживается близкой к резонансной частоте моста с помощью системы фазовой автоподстройки частоты, сигнал ошибки в которой формируется за счет использования фазоманипулированного пилот - сигнала.
Измерительный трансформатор конструктивно может быть выполнен в виде трансформатора с короткозамкнутым витком связи, что обеспечит достаточно высокую развязку входных и выходных цепей моста по проходной емкости. Резонансный режим обеспечит высокий и постоянный коэффициент преобразования в заданном диапазоне изменений измеряемой разности емкостей.
С целью обеспечения резонансного режима во всем диапазоне изменений емкостей датчиков и снижения требований к качеству заводской настройки измерительный генератор и мостовая цепь могут быть охвачены системой фазовой автоподстройки частоты. Выходная обмотка мостовой цепи, в данном случае, будет нагружена на ключевой синхронный детектор, что обеспечит необходимую линейность характеристики схемы во всем диапазоне изменений емкостей датчиков и достаточно высокую устойчивость к воздействию внешних электромагнитных помех. Необходимая крутизна характеристики тракта будет обеспечена масштабирующим усилителем на базе операционного усилителя. Коэффициент масштабирования и, следовательно, крутизна преобразования могут быть установлены при настройке схемы изменением значения регулировочного резистора.
Новизна заявленного технического решения заключается:
- в использовании уникальных силовых нанопозиционеров для обеспечения выхода точной ступени наностола на заданные координаты;
- в использовании высокоточного гетеродинного интерферометра для надежного измерения дробной части полосы при определении положения точной ступни наностола;
- в использовании высокочувствительного емкостного датчика перемещения для устранения продольных девиаций при перемещении точной ступени наностола, что может значительно уменьшить реальное время точной юстировки.
Ступень 2 грубого позиционирования объекта обеспечивает перемещение (упомянутого объекта) в диапазоне 160 мм в плоскости базового элемента 1 (по любой из осей координат X или Y) с точностью приблизительно 3 мкм, что позволяет позиционировать объект 4 с динамическим диапазоном 5×104. Ступень 1 точного позиционирования (а именно: ее подвижный установочный элемент 5) перемещается в плоскости X, Y на базе приблизительно 10-20 мкм2 с возможностью обеспечения дискретного перемещения в пределах - 0,1 нм. Указанная точность дискретного перемещения подвижного установочного элемента 5 ступени 3 точного позиционирования объекта 4 обеспечивается посредством четырех пар суперпрецизионных силовых, преимущественно, магнитострикционных приводов (т.е. позиционирующих элементов 7, 8, 9, 10, 11, 12, 13, 14 нанометрического диапазона). Это обеспечивает возможность работы заявленного устройства с динамическим диапазоном 2×105. При этом ступень 3 точного позиционирования обеспечивает точность позиционирования объекта 4 (в плоскости базового элемента 1) не хуже 5 нм по каждой из осей (X, Y) координат.
Вполне реально, что используемая в заявленном устройстве измерительная система контроля положения позиционируемого объекта 4 (т.е. система контроля /в плоскости Х-Y/, положения ступеней 2 и 3 грубого и точного /соответственно/ позиционирования объекта 4), при использовании двухкоординатной измерительной системы на базе гетеродинных лазерных интерферометров (а также ранее упомянутых емкостных датчиков девиации) позволяет проводить измерение и контроль положения (в плоскости X, Y) ступени 3 точного позиционирования во всем диапазоне изменения координат по указанным координатным осям с точностью приблизительно 1 нм.
Как ранее указывалось, в качестве ступени 2 грубого позиционирования объекта 4 используется жесткая опорная плита, перемещающаяся (в процессе грубого позиционирования объекта 4) относительно базового элемента 1 на “воздушной подушке” (реализуемой любыми известными из уровня техники устройствами) посредством, по меньшей мере, двух прецизионных линейных двигателей. Точность перемещения, обеспечиваемая известными из уровня техники прецизионными линейными двигателями, составляет (на базе перемещения 0,1-1 м) приблизительно 2-3 мкм. По достижении заданных координат ступень 2 грубого позиционирования жестко фиксируется на опорной плоскости базового элемента 1, например, посредством любой известной из уровня техники системы вакуумного присоса.
Затем осуществляется окончательная юстировка (позиционирование) кинематически связанной со ступенью 2 грубого позиционирования (которая /т.е. ступень 2/, в данный момент времени, жестко зафиксирована относительно базового элемента 1) ступени 3 точного позиционирования объекта 4.
Как ранее указывалось, ступень 3 точного позиционирования в вышеупомянутый “данный момент времени” синхронно перемещалась совместно с жесткой опорной плитой ступени 2 грубого позиционирования.
Далее осуществляется заданное суперпрецизионное перемещение подвижного установочного элемента 5 (ступени 3 точного позиционирования) по двум координатным осям (Х-Y). При этом упомянутое перемещение подвижного установочного элемента 5 вдоль любой из осей координат (X или Y) осуществляется посредством только тех двух пар позиционирующих элементов (например, пар элементов 7, 8 и 9, 10, соответственно, при перемещении установочного элемента 5 вдоль оси Y), которые размещены оппозитно одна относительно другой, при условии, что остальные две пары позиционирующих элементов (в данном случае, пары элементов 11, 12 и 13, 14) в момент совершения указанного перемещения (т.е. вдоль оси Y) контактно не взаимодействуют с упомянутым подвижным установочным элементом 5. При перемещении установочного подвижного элемента 5 вдоль оси X вышеупомянутые пары позиционирующих элементов функционируют в обратном (в части взаимодействия с подвижным установочным элементом 5) порядке. Указанный процесс регламентируется программным путем с использованием электронно-вычислительных машин.
В случае использования в качестве позиционирующих элементов 7, 8, 9, 10, 11, 12, 13 и 14 магнитострикционных преобразователей (нанопозиционеров), изменение длины каждого из 8-ми упомянутых преобразователей осуществляется посредством изменения напряженности магнитного поля в зоне каждого магнитострикционного элемента соответствующего магнитострикционного преобразователя. Из двух пар позиционирующих элементов, размещенных оппозитно, одна, расположенная с одной стороны установочного элемента 5, может быть выполнена в виде пружин (вместо магнитострикционных преобразователей).
Управление процессом изменения параметров магнитного поля (в частности, напряженности) в зоне каждого магнитострикционного элемента соответствующего преобразователя контролируется посредством компьютера с заданной программой, которая (для достижения заранее заданного положения ступени 3 точного позиционирования) должна использовать данные по ее (т.е. ступени 3) координатам, измеряемым посредством специальной интерферометрической измерительной системы контроля положения позиционируемого объекта 4, которая, как ранее указывалось, основана на базе, по меньшей мере, трех гетеродинных интерферометров, обеспечивающих измерение координат по обеим осям (X, Y) с необходимой (заданной) точностью.
Таким образом, выход ступени 3 точного позиционирования заявленного устройства (иначе, наностола) на заданные координаты (в плоскости Х-Y) осуществляется следующим путем.
После перемещения грубой ступени в требуемое положение с точностью ~3 мкм, контролируемой с помощью двух интерферометров по оси Х и одного по оси Y (с целью устранения возможных перекосов) плита грубой ступени фиксируется на опорной поверхности базового стола. После этого стрикторы, магнитные системы которых обеспечивают необходимое изменение локальных значений напряженности магнитного поля у поверхности каждого стриктора в соответствии с компьютерной программой, использующей данные по координатам точной ступени, полученные с помощью соответствующих интерферометрических измерений, завершают окончательную юстировку точной ступени с дискретом до ~0,1 нм в диапазоне перемещений 10-20 мкм при непрерывном интерферометрическом контроле, обеспечивая точность позиционирования не хуже 5 нм.
Таким образом, заявленное позиционирующее устройство может быть промышленно реализовано для обеспечения позиционирования различных объектов с точностью позиционирования (дискретностью шага позиционирования) не более 5 нм. Этим обеспечивается достижение принципиально новых технологических возможностей в области микроэлектроники, оптического приборостроения, прецизионного машиностроения и т.п. Следовательно, заявленное техническое решение может стать основой для создания нового поколения суперпрецизионного оборудования для технологических процессов резания, гравирования, фрезерования и т.д., а также оборудования для фотолитографических и рентгенолитографических комплексов, используемых в микроэлектронной и полиграфической промышленности.
Использование нанопозиционера может стать основой для развития нового поколения прецизионных станков для технологических процессов резки, гравирования, фрезерования и т.д., а также столов позиционирования в сверхточных фотограмметрических установках, в голографических установках нового поколения, в делительных машинах для производства дифракционных решеток, в комплексах фото- и рентгенолитографии, а также смогут позволить радикально повысить степень интеграции элементов (в т.ч. “ЧИП”ов), например, в микропроцессорах.
Реферат
Изобретение относится к области машиностроения, а именно к прецизионным позиционирующим средствам, и может быть использовано, например, в прецизионных станках, высокоточных копирующих устройствах, а также в электронной промышленности и других областях техники, преимущественно, для обеспечения дискретности позиционирования объекта в нанометрическом диапазоне при возможности обеспечения общего перемещения этого объекта. Устройство содержит базовый элемент, на котором установлена с возможностью возвратно-поступательного перемещения относительно базового элемента ступень грубого позиционирования. На последней установлена с возможностью возвратно-поступательного перемещения относительно ступени грубого позиционирования ступень точного позиционирования с установочным элементом. Ступень грубого позиционирования кинематически связана с базовым элементом и ступенью точного позиционирования с возможностью обеспечения перемещения обеих ступеней относительно базового элемента, а кинематическая связь упомянутых ступеней позиционирования осуществлена с возможностью автономного перемещения установочного элемента ступени точного позиционирования относительно ступени грубого позиционирования и соответственно базового элемента. Ступени грубого и точного позиционирования установлены с возможностью упомянутых перемещений по двум осям координат. Ступень грубого позиционирования выполнена в виде жесткой опорной плиты, на которой жестко закреплена рамка, внутри которой расположен установочный элемент ступени точного позиционирования, имеющий возможность перемещения и фиксации в заданном положении посредством попарно установленных на каждой стороне упомянутой рамки позиционирующих элементов нанометрического диапазона перемещений. При этом ступень грубого позиционирования выполнена обеспечивающей заданное перемещение с погрешностями меньшими, чем диапазон перемещения ступени точного позиционирования по каждой из двух упомянутых осей координат. Использование изобретения обеспечивает дискретность позиционирования перемещаемого объекта на заданное расстояние в нанометровом диапазоне, что повышает достоверность результатов измерения при контрольных замерах положения и расширяет эксплуатационные возможности устройства. 7 з.п. ф-лы, 2 ил.

Комментарии