1
Изобретение относится к машиностроению , а именно к механизмам,обеспечивающим
линейные шаговые перемеще- иия по двум осям координат, и может 5ыть использовано в технологическом
автоматизированном оборудовании, предназначенном для выполнения операций обработки или сборки.
) Цель изобретения - повышение точ- 0 ости останова в заданных положениях.
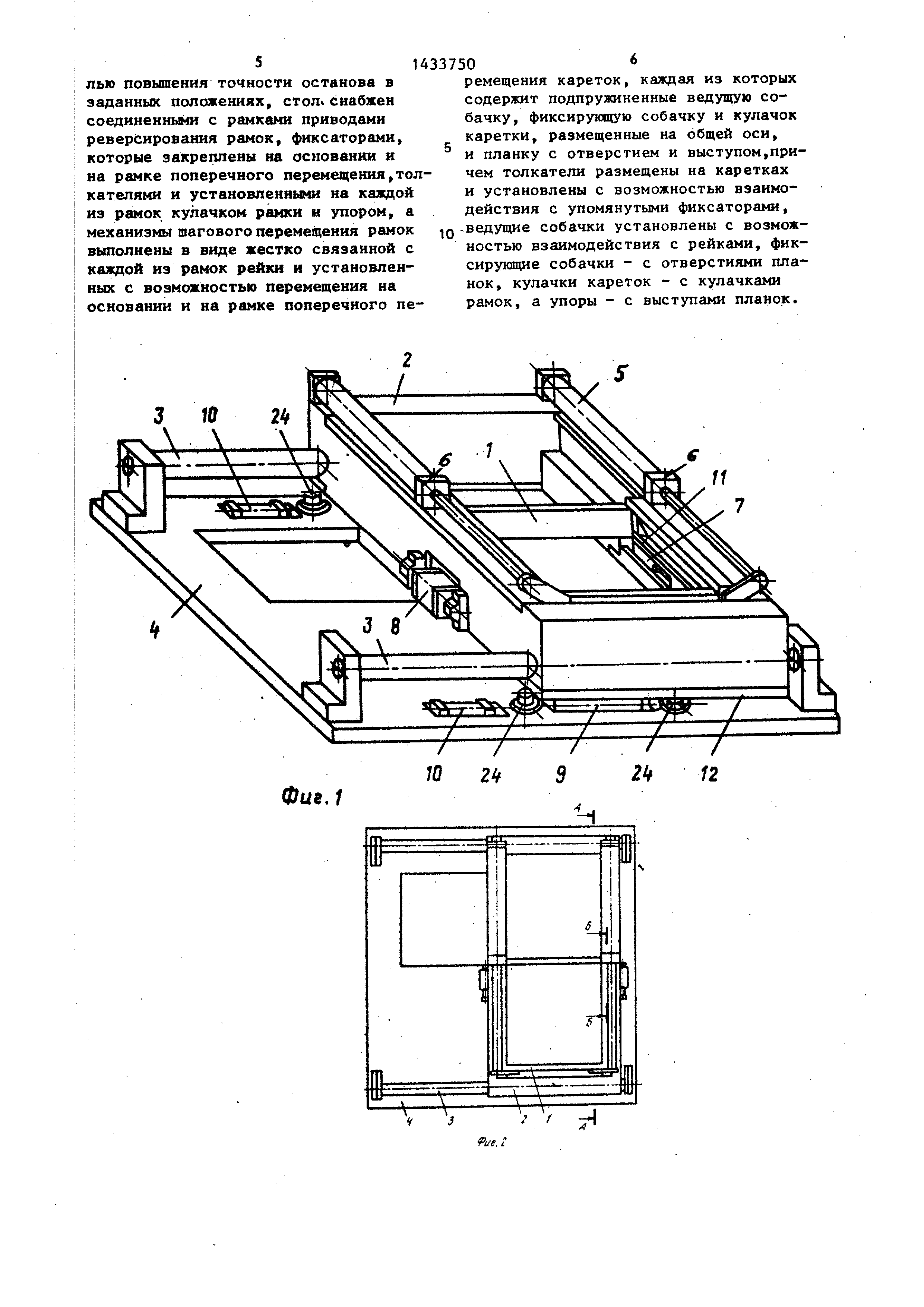
На фиг. 1 схематично изображен двух- Цоординатный стол; на фиг. 2 - то же,
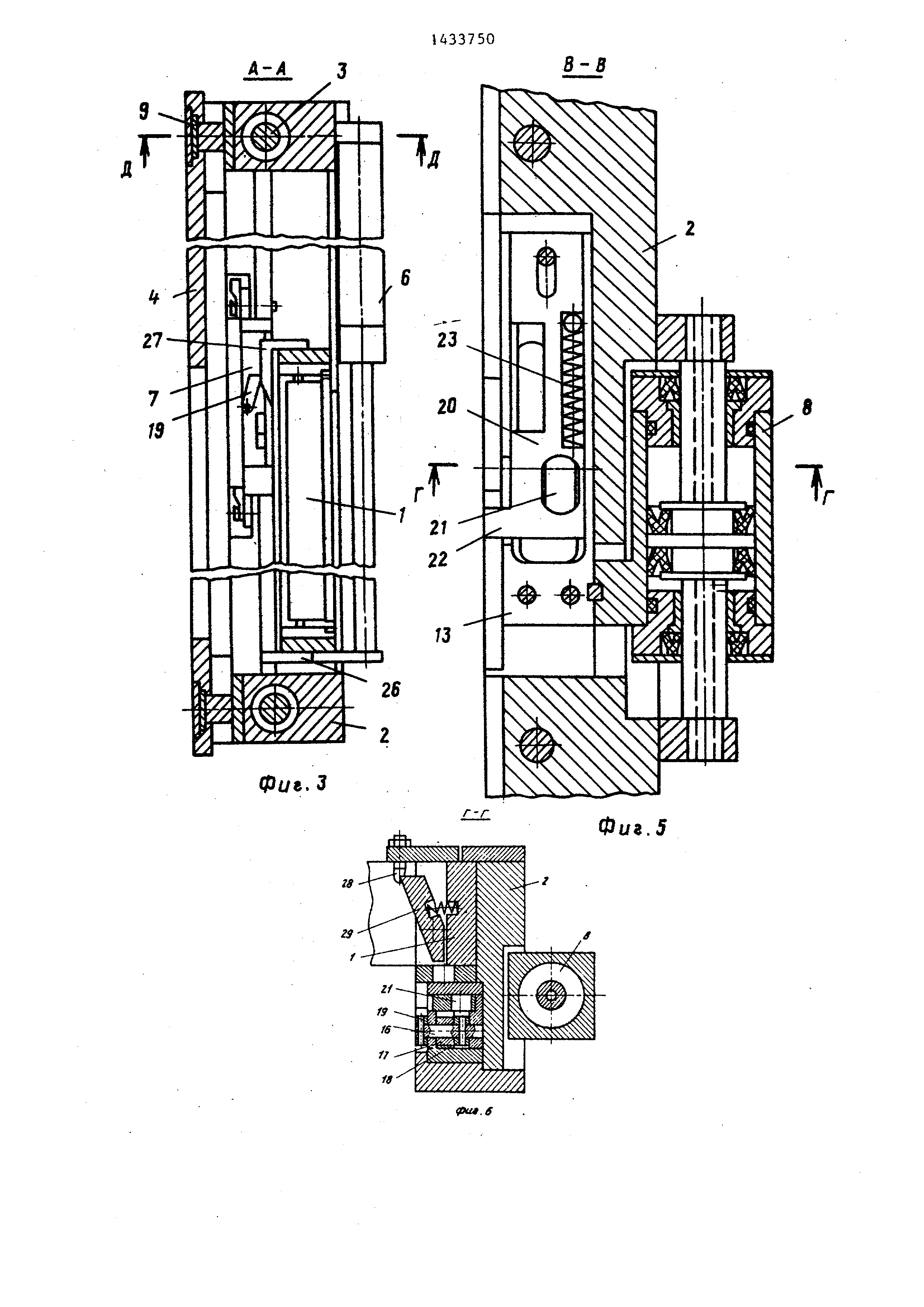
ид в плане; на фиг. 3 - разрез А-А Йа фиг. 2; на фиг. 4 - разре Б-Б на t5
г. 2 (механизм продольного переме- 1|цения рамки 1); на фиг. 5 - разрез
-В на фиг. 4 на фиг. 6 - разрез Г-Г ijia фиг. 5; на фиг. 7 - разрез Д-Д на
фиг. 2 (механизм поперечного переме- 20 1|цения рамки 2 с приводом реверсирова- Кшя) .
Двухкоординатный стол содержит 1 продольного перемещения и рам-
licy 2 поперечного перемещения. Рамка 1 25 установлена с возможностью перемещения
по продольньм направляющим рамки i, а рамка 2 - по поперечньм направляющим 3, закрепленным на основании 4. В рамку 2 встроены пневмоцилиндры 5
реверсирования рамки 2, штоками которых являются направлякнцие 3. На рамке
1 закреплены пневмоцилиндры 6 реверсирования рамки 1.
Для осуществления шагового перемещения рамки 1, в рамке 2 установлены
с возможностью продольного перемещения две каретки 7 с пневмоцилиндрами
8. Для шагового перемещения рамки 2 на основании 4 установлены с возможностью
перемещения две каретки 9 с пневмоцилиндрами 10.
Для взаимодействия с каретк;ами 7 и 9 на рамках 1 и 2 с нижней стороны закреплены рейки 11 и 12.
Каждая из кареток 7 состоит из корпуса 13, верхней крьшши 14 и нижней
крышки 15. В корпусе 13 на общей оси 16 размещены ведущая собачка 17, фиксирующая
собачка 18, ас наружной части корпуса - кулачок 19 каретки, причем фиксирующая собачка 18 и кулачок
19 каретки закреплены на оси 16. Кроме того, в корпусе 13 размещены планка
20 с отверстием 21, имеющая выве
314
денный из корпуса 13 выступ 22, и пржина 23. Устройство кареток 9 аналогично устройству кареток 7.
Для более четкой фиксации рамок 1 и 2 в заданных координатах, в рамке
2 и на основании 4 смонтированы подпружиненные фиксаторы 24, а на нижни
крышках 15 кареток 7 и 9 расположены толкатели 25, установленные с возмож
ностью взаимодействия с фиксаторами 24. Для управления каретками 7 и 9
на рамках 1 и 2 с нижней стороны установлены упоры 26 и кулачки 27 рамки . Для установки объекта укладки в
рамке 1, последняя снабжена фиксиру- Ю1ЦИМИ пальцами 28 и подпружиненными планками 29.
Двухкоординатный стол работает следующим образом.
В рамку 1 механически или вручную через окно в основании 4 помещается объект укладки, например кассета,
фиксируется на пальцах 28 и закрепляется планками 29. После отработки одной позиции в кассете, каретки 7
при помощи пневмоцилиндров 8 перемещаются назад до упора, при этом толкатели
25 перемещаются относительно фиксаторов 24 и вьшодят их из отверс тий реек 11, а ведущие собачки 17
входят в зацепление со следующими отверстиями реек 11. После переключения хода пневмоцилиндров 8 каретки
7 перемещаются вперед и при помощи ведущих собачек 17, зацепленных с
рейками 11, перемещают рамку 1 впере на один шаг. В конце хода кареток 7
вперед толкатели 25 освобождают фиксаторы 24, которые, западая в отверстия
реек 11, фиксируют рамку 1 относительно рамки 2. Последующие перемещения
рамки 1 на один шаг производятся аналогичным образом.
После выполнения последнего шага и отработки последней в ряду позиции
кассеты, каретки 7 также перемещаютс назад до упора. При этом планки 20
выступами 22 вступают во взаимодействие с упорами 26 и останавливаются
Остальные элементы кареток 7 продолжают перемещения относительно планок
20, при этом сжимаются пружины 23, ведущие собачки 17 прижимаются планками
20 и выходят из зацепления рейками 11, фиксирукицие собачки 18 ока-
зьшаются возле отверстий 21 в планках 20 освобождаются и входят в зацепление с планками 20 через отверс
5
0
5
Q
Q
35
40
45
50
55
Тин 21 и фиксируют их. Кроме того, при движении кареток 7 назад фиксаторы 24 выводятся из зацепления «с
рейками 11. Таким образом, связь рамки 1 с рамкой 2 через каретки 7 прерьтается. После этого включаются
пневмоцилиндры 6 реверсирования рамки 1 и последняя перемещается по
направляющим рамки 2 в исходное положение .
В это время производится переме;-
щение на один шаг рамки 2 в поперечном направлении манипуляции кареток
9, аналогичных манипуляциям кареток 7 при помощи пневмоцилиндров 10. При
возвращении рамки 1 в исходное положение , кулачки 27 рамки, воздействуя
на кулачки 19 каретки и через оси 16- на фиксирукщие собачки 18, выводят
их из зацепления с планками 20. Освобожденные планки 20 при помощи пружин
23 перемещаются в исходное положение , при этом освобождаются ведущие
собачки 17 и фиксируются фиксирующие собачки 18. Ведущие собачки 17
входят в зацепление с рейками 11, восстанавливая связь рамки 1 с рамкой 2
через каретки 7. Пневмоцилиндр 6 реверсирования отключают от пневмосети,
после чего рамка 1 готова для выполнения следукицего цикла. При последующем
перемещении кареток 7 на один шаг вперед цикл повторяется.
При заполнении последнего ряда одновременно или последовательно с ма-
якпуляцкями реверса рамки 1 производят манипуляции с реверсированием
рамки 2 при помощи кареток 9 и пневмоцилиндров 5, аналогичные манипуляциям
рамки 1 .При возвращении рамки 2 в исходное положение пневмоцклиндры
5 реверсирования отключают от пневмо- сети.
Таким образом, стол последовательно имеет фиксированные остановы во всех заданных положениях.
Формула изобретения
Двухкоординатный стол с шаговым
перемещением, содержащий основание, установленные с возможностью перемещения
относительно одна другой и основания посредством приводов рамки продольного и поперечного перемещений
, причем приводы включают механизмы шагового перемещения рамок,о т- лйчающийся тем, что, с целью
повышения точности останова в заданных положениях, стол снабжен
соединеншши с рамкани приводами реверсирования рамок, фиксаторами, которые закреплены на основании и
на рамке поперечного перемещения,толкателями и установленными на каждой из рамок кулачком рамки и упором, а
механизмы шагового перемещения рамок выполнены в виде жестко связанной с
каждой из рамок рейки и установленных с возможностью перемещения на основании и на рамке поперечного пеvV
Л:
Фие./
37506
ремещения кареток, каждая из которых
содержит подпружиненные ведущую собачку , фиксирующую собачку н кулачок
каретки, размещенные на общей оси, и планку с отверстием и выступом,причем
толкатели размещены на каретках и установлены с возможностью взаимодействия с упомянутыми фиксаторами,
ведущие собачки установлены с возможностью взаимодействия с рейками, фиксирующие
собачки - с отверстиями планок , кулачки кареток - с кулачками рамок, а упоры - с выступами планок.
10
6
ff
Г Г
Фиг.5



Комментарии