Чувствительные к давлению хирургические системы и способы для витрэктомии - RU2651086C2
Код документа: RU2651086C2
Чертежи



Описание
Уровень техники
Настоящее изобретение относится к зондам, системам и способам для витрэктомии. Более конкретно, но не в качестве ограничения, настоящее изобретение относится к мониторингу зондов для витрэктомии и их режимов эксплуатации.
Микрохирургические операции часто требуют точности иссечения и/или удаления различных тканей организма. Например, некоторые офтальмологические хирургические операции требуют иссечения и удаления части стекловидного тела, прозрачного желеобразного материала, который заполняет задний сегмент глазного яблока. Жидкая часть стекловидного тела, или стекловидное тело, содержит многочисленные микроскопические фибриллы, которые во многих местах прикреплены к сетчатке. По этой причине иссечение и удаление стекловидного тела должно быть сделано с большой осторожностью, чтобы избежать тяжей на сетчатке, отделения сетчатки от сосудистой оболочки, разрыва сетчатки, или, в худшем случае, иссечения и удаления самой сетчатки. В частности, деликатные операции, такие как обработка подвижных тканей (например, иссечение и удаление стекловидного тела вблизи отслойки части сетчатки или разрыва сетчатки), рассечение основания стекловидного тела, а также иссечение и удаление мембран являются особенно трудными.
Использование микрохирургических режущих зондов в офтальмологической хирургии заднего сегмента является хорошо известным. Такие режущие зонды, как правило, содержат полый наружный режущий элемент, полый внутренний режущий элемент, подвижно расположенный внутри полого наружного режущего элемента и размещенный соосно с ним, а также порт, проходящий в радиальном направлении через наружный режущий элемент вблизи его дистального конца. Стекловидное тело и/или мембраны, аспирируются в открытый порт, а внутренний элемент приводится в действие, закрывая порт. При закрытии порта режущие поверхности на обоих внутреннем и наружном режущих элементах действуют совместно для того, чтобы иссечь стекловидное тело и/или мембраны, а срезанные ткани затем отсасывают через внутренний режущий элемент.
Многие осложнения могут возникнуть во время проведения операций, требующих применения таких микрохирургических режущих зондов. Некоторые из этих осложнений могут возникать из-за характера операций. Например, во время удаления стекловидного тела может произойти коллапс глазного яблока, если допустить слишком большое падение давления в стекловидной камере. Кроме того, осложнения могут возникнуть в связи с самими режущими зондами. Например, если пневматическая линия режущего зонда или инфузионная линия перегибаются или почти перегибаются, поддерживание постоянного контроля зонда может стать трудным в связи с тем, что меняется давление.
Настоящее изобретение направлено на разрешение вопросов, связанных с одним или несколькими недостатками прототипа.
Сущность изобретения
В одном иллюстративном аспекте настоящее изобретение относится к системе для обеспечения ирригации в глазное яблоко пациента во время медицинской операции. Система содержит инфузионную линию, выполненную с возможностью размещения источника текучей среды в сообщении по текучей среде с глазным яблоком пациента, и одного или более датчиков давления, соединенных с инфузионной линии и выполненных с возможностью измерения величин давления в 20 пределах инфузионной линии во время медицинской хирургической процедуры. Инфузионная линия содержит относительно более гибкий удлиненный элемент, имеющий проксимальный конец, дистальный конец и просвет, проходящий сквозь него от проксимального конца к дистальному концу. Просвет сконфигурирован для прохождения ирригационной жидкости в глазное яблоко пациента. Инфузионная линия дополнительно содержит относительно более жесткий контактирующий элемент на дистальном конце, который сконфигурирован для проникновения в стекловидную камеру глазного яблока пациента.
В дополнительном иллюстративном аспекте настоящее изобретение относится к хирургической системе для витрэктомии. Система содержит зонд для витрэктомии, имеющий режущую часть, которая имеет внутреннюю режущую трубку, наружную режущую трубку и наружный порт. Внутренняя режущая трубка выполнена с возможностью перемещения относительно наружной режущей трубки для резания стекловидного тела во время операции витрэктомии. Система также содержит двигатель, выполненный с возможностью перемещения внутренней режущей трубки относительно наружной режущей трубки для открытия и закрытия наружного порта, и один или более датчиков давления, соединенных с зондом для витрэктомии для измерения давления вблизи дистальной части зонда для витрэктомии и обеспечения обратной связи по давлению.
В другом приводимом в качестве примера аспекте настоящее изобретение относится к способу лечения офтальмологической патологии. Способ включает введение зонда, содержащего по меньшей мере один датчик давления, через склеру в стекловидную камеру пациента, измерение давления в стекловидной камере по меньшей мере одним датчиком давления для того, чтобы обеспечить измерение давления в стекловидной камере, и настройку параметра операции удаления стекловидного тела на основе измерения давления в стекловидной камере.
Следует понимать, что как приведенное выше общее описание, так и ниже следующие графические материалы и подробное описание являются приводимыми в качестве примера и поясняющими по характеру, и предназначены для обеспечения понимания настоящего описания, не ограничивающего объем настоящего изобретения. В этой связи, дополнительные аспекты, конструктивные особенности и преимущества настоящего изобретения будут очевидны для специалистов в данной области из нижеследующего.
Краткое описание графических материалов
Прилагаемые графические материалы иллюстрируют варианты реализации изобретения устройств и способов, раскрытых в настоящем описании, и вместе с описанием служат для пояснения принципов настоящего изобретения.
Фиг. 1 является иллюстрацией хирургической системы в соответствии с приводимыми в качестве примера аспектами настоящего изобретения.
Фиг. 2 иллюстрирует вид в поперечном разрезе зонда для витрэктомии в соответствии с приводимыми в качестве примера аспектами настоящего изобретения.
Фиг. 3 иллюстрирует вид в поперечном разрезе крупным планом дистальной части режущего инструмента зонда для витрэктомии по фиг. 2 в соответствии с приводимыми в качестве примера аспектами настоящего изобретения.
Фиг. 4 иллюстрирует зонд для витрэктомии и инфузионную линию по месту нахождения в глазном яблоке в соответствии с приводимыми в качестве примера аспектами настоящего изобретения.
Фиг. 5А является иллюстрацией инфузионной линии в соответствии с 5 приводимыми в качестве примера аспектами настоящего изобретения.
На фиг. 5В и 5С представлены диаграммы, иллюстрирующие взаимосвязь между давлениями и местоположениями на всем протяжении инфузионной линии согласно фиг. 5A.
На фиг. 6 представлена функциональная схема, иллюстрирующая способ лечения офтальмологического заболевания в соответствии с приводимыми в качестве примера аспектами настоящего изобретения.
Эти фигуры будут более понятны со ссылкой на последующее подробное описание.
Подробное описание изобретения
В целях содействия пониманию принципов настоящего изобретения ссылки будут сделаны на варианты реализации изобретения, проиллюстрированные на графических материалах, а для их описания будут использоваться конкретные формулировки. Тем не менее, следует понимать, что ограничение объема изобретения не предусмотрено. Любые изменения и дальнейшие модификации описанных устройств, инструментов, способов и любые дополнительные направления практического применения настоящего изобретения в полной мере рассматриваются как обычно встречающиеся специалисту в данной области, к которой относится изобретение. В частности, в полной мере, предполагается, что конструктивные особенности, компоненты и/или этапы, описанные по отношению к одному из вариантов реализации изобретения, могут быть объединены с конструктивными особенностями, компонентами и/или этапами, описанными по отношению к другим вариантам реализации настоящего изобретения. Для упрощения, в некоторых примерах, одинаковые ссылочные номера использованы на 30 всех чертежах для обозначения одинаковых или подобных частей.
Настоящее изобретение в целом относится к системам и способам контроля давления в различных точках, представляющих интерес в офтальмологической хирургии, в частности, во время операции, в ходе которой хирургу необходимо удалить стекловидное тело из глазного яблока пациента. Изменения давления, а также чрезмерно низкое или высокое давление, могут осложнить выполнение таких операций, помещая пациента в группу риска. В некоторых аспектах, описанных в настоящем документе, зонд для витрэктомии содержит датчики давления для контроля внутриглазного давления, давления внутри наконечника зонда, и давления окружающей среды. В некоторых дополнительных аспектах изобретения, описанных в настоящем документе, инфузионная линия содержит датчики давления по всей ее длине для того, чтобы определить наличие и местонахождение перегибов в линии.
Системы и способы, описанные в настоящем документе, могут позволить хирургу лучше контролировать важные параметры давления и быстро реагировать на перепады давления, которые возникают в ходе операции. За счет улучшения возможностей хирурга или обеспечения возможности системы реагировать на режим давления во время операции витрэктомии, результаты для пациентов могут 15 быть улучшены.
Фиг. 1 иллюстрирует хирургическую систему 100 для витрэктомии в соответствии с приводимым в качестве примера вариантом реализации изобретения. Хирургическая система 100 содержит консоль 102, которая имеет мобильный базовый корпус 103 и соединенный с ним экран дисплея 104, показывающий данные, относящиеся к работе и эксплуатационным характеристикам системы во время хирургической операции витрэктомии. Хирургическая система 100 содержит систему зонда для витрэктомии 110, которая будет описана более подробно ниже. Консоль 102 хирургической системы 100 содержит конструктивные особенности, которые могут обеспечить возможность управления системой зонда для витрэктомии 110. Например, пневматические и/или электрические линии обеспечения 102 могут соединять систему зонда 110 с корпусом 102. Линии обеспечения 102 облегчают управление и мониторинг системы зонда 110 также путем передачи данных между системой зонда 110 и консолью 102.
Консоль 102 дополнительно содержит один или более процессоров в сообщении с памятью, имеющей машинные команды для управления системой зонда 110, информацией, выводимой на экран 104, а также приемом и обработкой входных команд и данных. Хирургическая система 100 может содержать сетевой интерфейс для связи с сетью. Эти конструктивные особенности облегчают управление и мониторинг системы зонда 110 во время работы. Кроме того, эти конструктивные 35 особенности могут облегчить мониторинг, обработку данных и управление для одного или более датчиков давления, расположенных в системе зонда 110 или в ее пределах. В некоторых вариантах реализации изобретения хирургическая система 100 дополнительно содержит датчик давления 106, расположенный на корпусе 103 или около него, для определения давления окружающей среды. Таким давлением 5 окружающей среды может быть атмосферное давление.
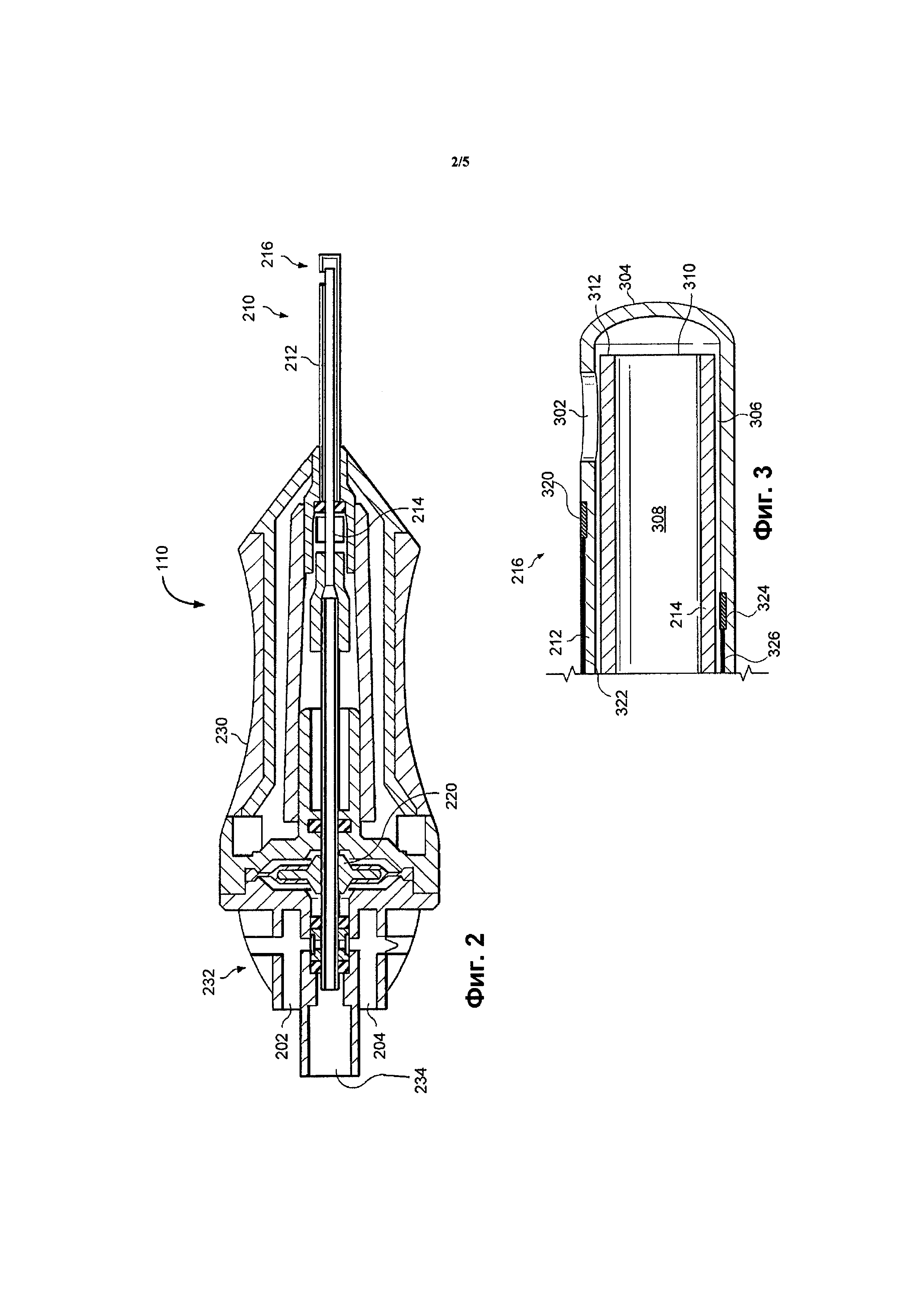
На фиг. 2 проиллюстрирован вид в поперечном сечении системы зонда для витрэктомии 110, ранее представленной на фиг. 1. В этом примере система зонда 110 представляет собой систему с пневмоприводом, которая функционирует посредством приема сжатого воздуха с изменяющимся давлением через первый и 10 второй порты 202 и 204 по линиям обеспечения 112, проиллюстрированным на фиг. 1. Система зонда 110 содержит в качестве ее основных компонентов режущий инструмент 210 и привод зонда, проиллюстрированный в рамках настоящего документа в виде пневматической диафрагмы, совершающей возвратно-поступательное движение 220, частично заключенные в корпус зонда 230. Корпус зонда 230 содержит концевую часть 232 на проксимальном конце зонда с первым и вторым портами для подачи воздуха 202, 204 и одним всасывающим портом 234. Режущий инструмент 210 содержит наружную режущую трубку 212 и внутреннюю режущую трубку 214. Как можно видеть, режущий инструмент 210 проходит от корпуса 230 и содержит дистальную часть 216.
Фиг. 3 представляет собой вид в поперечном сечении, который представляет дополнительные подробности относительно дистальной части 216 режущего инструмента 210, который показан на фиг. 2 и обсуждался выше. Дистальная часть 216 содержит наружный порт 302, который во время использования принимает ткани, такие как офтальмологические ткани. Наружный порт 302 смещен от закрытого конца 304 дистальной части 216. Наружный порт 302 находится в сообщении по текучей среде с внутренним каналом 306, наружной режущей трубки 212. Внутренняя режущая трубка 214 расположена во внутреннем канале 306 наружной режущей трубки 212. Внутренняя режущая трубка 214 имеет внутреннее отверстие 308, открытый конец 310 и режущую поверхность 312. Внутреннее отверстие 308 находится в сообщении по текучей среде с аспирационной линией, соединенной с всасывающим портом 234, показанным на фиг. 2. Аспирационная линия является частью линий обеспечения 112 по фиг. 1. Всасывающий порт 234 соединяет аспирационную линию с вакуумным пространством (обеспечивающим давление аспирации), которое может быть обеспечено за счет использования 35 консоли 102 или другого устройства, и используется для того, чтобы втянуть ткани в наружный порт 302 в тех случаях, когда внутренняя режущая поверхность 312 расположена в стороне от порта 302. Внутренняя режущая трубка 214 перемещается внутри внутреннего канала 306 наружной режущей трубки 212 для того, чтобы вырезать ткани, которые втягиваются в наружный порт 302 с помощью аспирационной линии. Офтальмологические ткани, принятые наружным портом 302, могут содержать стекловидное тело или мембраны.
При использовании для резания тканей внутренняя режущая трубка 214 сначала перемещается в сторону от наружного порта 302, а давление вакуума втягивает ткани в порт 302 и внутренний канал 306. Затем внутренняя режущая трубка 214 перемещается по направлению к наружному порту 302 и отрезает ткани внутри внутреннего канала 306 режущей поверхностью 312. Отрезанные ткани втягиваются через внутреннее отверстие 308 внутренней режущей трубки 214 при помощи системы аспирации. Затем внутренняя режущая трубка 214 перемещается в сторону от наружного порта 302 и процесс резания повторяется.
Согласно обеим фиг. 2 и 3 внутренняя режущая трубка 214 приводится в действие давлением воздуха, направленного на противоположные стороны диафрагмы 220. В одном примере операции, если давление воздуха увеличивается в первом порту 202, диафрагма 220 будет перемещаться в дистальном направлении, вытесняя при этом внутреннюю режущую трубку 214 относительно наружной режущей трубки 212, таким образом, закрывая принимающий ткани наружный порт 302 наружной режущей трубки 212. Это срезает любой материал стекловидного тела, который может быть аспирирован в принимающий ткани наружный порт 302. Сброс давления в первом порту 202 и увеличения давления во втором порту 204 перемещает диафрагму 220 в проксимальном направлении, открывая при этом принимающий ткани наружный порт 302, в результате чего он может всасывать новый материал стекловидного тела, подлежащий резанию. Стоит отметить, что другие варианты реализации изобретения включают альтернативные приводы зонда. Например, некоторые варианты реализации изобретения включают привод в виде поршневого двигателя вместо диафрагмы. В этом типе варианта реализации изобретения режущий инструмент 210 расположен таким образом, что перемещение поршня также перемещает внутреннюю режущую трубку 214 режущего инструмента 210. Еще другие варианты реализации изобретения включают привод с другими типами пневматических или электрических двигателей, которые приводят в движение внутреннюю режущую трубку 214.
Система зонда для витрэктомии 110, которая показана на фиг. 2 и 3, дополнительно содержит множество датчиков давления. Первый датчик давления 320 является соединенным (например, встроенным) с наружной режущей трубкой 212 и выполнен с возможностью определения и измерения давления снаружи наружной режущей трубки 212. В проиллюстрированном варианте реализации изобретения датчик давления сконфигурирован между наружным портом 302 и корпусом системы 230. В других вариантах реализации изобретения датчик давления 320 может быть расположен на наружной поверхности закрытого конца 304. Как правило, датчик давления 320 расположен на наружной поверхности наружной режущей трубки 212 с целью измерения давления за пределами трубки 212. Это наружное давление может быть давлением окружающей среды, или атмосферным давлением, или может представлять собой давление в стекловидной камере, и может быть использовано для определения внутриглазного давления, в зависимости от расположения датчика 320 и режущего инструмента 210. Как показано, датчик давления 320 представляет собой оптоволоконный датчик давления, соединенный с электроникой в корпусе зонда 230, который показан на фиг. 2, и/или консоли 102, которая показана на фиг. 1, с помощью линии датчика 322. Линия датчика 322 может быть электрической или оптоволоконной линией в зависимости от типа датчика давления, используемого для датчика давления 320.
Как датчик давления 320, так и линия датчика 322 расположены заподлицо внутри выемок, сформированных в наружной режущей трубке 212 таким образом, что поверхность наружной режущей трубки 212 остается на одном уровне. В некоторых вариантах реализации изобретения эта выемка выполнена на наружной стороне режущей трубки 212, в то время как в других она сформирована на внутренней стороне, и имеет отверстие для датчика 320 для того, чтобы получить доступ к наружному давлению.
Второй датчик давления 324 содержится в режущем инструменте 210 для того, чтобы измерить давление внутри наружной трубки 212 режущего инструмента 210. Как проиллюстрировано, второй датчик давления 324 расположен на внутренней поверхности наружной режущей трубки 212. Линия второго датчика 326 соединяет второй датчик давления 324 с электроникой, как описано выше в связи с датчиком давления 320. В некоторых вариантах реализации изобретения датчик давления 324 может быть расположен внутри стенок внутренней режущей трубки 214, либо на наружной поверхности или же на внутренней поверхности. Датчик давления 324 позволяет осуществлять измерение давления внутри режущего инструмента 210. Использование датчиков давления 320 и 324 позволяет определить разность давлений. И один и другой датчики давления 320 и 324 могут представлять собой оптоволоконный датчик давления в данном варианте реализации изобретения, в то время как в других вариантах реализации 5 изобретения используются другие типы датчиков давления.
Фиг. 4 иллюстрирует вид в частичном поперечном разрезе глазного яблока 400, подвергающегося операции, включающий систему зонда для витрэктомии 410 и инфузионную линию или инфузионную канюлю 420. Как система зонда 410, так и инфузионная линия 420 могут быть соединены с консолью, подобной консоли 102 на фиг. 1. Как проиллюстрировано на фиг. 4, система зонда 410 и инфузионная линия 420 введены через склеру 402 в стекловидную камеру 404 глазного яблока 400. Инфузионная линия 420 представляет собой специализированный тип зонда, который используется для подачи замещающей жидкости или ирригационной жидкости в стекловидную камеру 404 во время операции витрэктомии. Уровень давления ирригационной жидкости может быть увеличен или уменьшен с помощью хирургической системы. Система зонда 410 является аналогичной системе зонда для витрэктомии 110, которая показана на фиг. 1, 2 и 3. В проиллюстрированном варианте реализации изобретения система зонда 410 содержит множество датчиков давления, включая датчик давления 412, датчик давления 414 и датчик давления 416. Каждый из датчиков давления 412-416 измеряет давление в различных местоположениях. Как проиллюстрировано, датчик давления 412 сконфигурирован на корпусе системы зонда 410 для измерения давления окружающей среды или атмосферного давления. Как обсуждалось выше в связи с фиг. 1, в некоторых вариантах реализации изобретения датчик давления окружающей среды, такой как датчик давления 412, установлен на наружной поверхности консоли 102, соединенной электрически и/или пневматически с системой зонда 410.
Датчики давления 414 и 416 расположены на режущем инструменте системы зонда 410. Эти датчики давления аналогичны датчикам давления 320 и 324, проиллюстрированным на фиг. 3. Как показано, датчик давления 414 расположен в системе зонда 410 для того, чтобы измерять давление снаружи режущего инструмента, то есть давление внутри стекловидной камеры 404. Датчик давления 416 расположен внутри режущего инструмента для того, чтобы измерять внутреннее давление, то есть внутреннее по отношению к режущему инструменту, что может быть использовано для получения характеристики вакуума, подаваемого через аспирационную линию в систему зонда 410. В дополнение к соответственно определенным показателям давлений, датчики давления 414 и 416, вместе с датчиком давления 412, могут быть использованы в совокупности для того, чтобы определять разность давлений, в частности характерное значение давления внутриглазного давления. Давления, которые могут быть измерены с помощью системы зонда 410, способствуют улучшению управления хирургической системой 100 по фиг. 1 путем предоставления дополнительной информации, которая может быть обработана с помощью хирургической системы 100 и использована для автоматизированного регулирования количества проходящей жидкости и давления.
Например, путем измерения и определения внутриглазного давления в глазном яблоке 400 хирургическая система 100 может быть в состоянии предотвратить коллапс глазного яблока 400 из-за чрезмерного удаления стекловидного тела из стекловидной камеры 404 или неадекватного замещения стекловидного тела физиологическим раствором или другой подходящей для замещения жидкостью через инфузионную линию 420 во время операции витрэктомии путем увеличения скорости потока замещающей жидкости, уменьшения аспирационного давления или скорости резания, или корректировки этих и других параметров. Кроме того, показатели внутреннего давления или разности давлений могут предоставить данные хирургической системы, касающиеся эксплуатационных параметров системы зонда 410 при удалении стекловидного тела.
Разность давлений может быть использована для определения внутриглазного давления. Как правило, внутриглазное давление, или ВГД, представляет собой показание манометрического давления, которое определяется как разность между абсолютным давлением в глазном яблоке (которое измерено с помощью датчика 414) и атмосферным давлением (которое измерено с помощью датчика 412). Таким образом, в некоторых приводимых в качестве примера вариантах реализации изобретения показания давления определяются датчиками 412 и 414 одновременно или почти одновременно таким образом, что реальное внутриглазное давление может быть рассчитано в зависимости от измеренных давлений.
Инфузионная линия 420 содержит гибкий удлиненный элемент 422, имеющий более жесткий контактирующий элемент 424, прикрепленный на дистальном конце. Инфузионная линия 420 подает из источника текучей среды замещающую текучую среду, которая протекает через центральный просвет с целью поддержания надлежащего внутриглазного давления в связи с тем, что части стекловидного тела 404 удаляются. Как проиллюстрировано, инфузионная линия 420 также содержит множество датчиков давления, включая датчик давления 426 и датчик давления 428. Датчик давления 426 расположен в инфузионной линии 420 таким образом, что он остается во время хирургической операции за пределами глазного яблока 400. В то время как датчик давления 426 расположен за пределами глазного яблока 400, датчик давления 428 расположен на дистальной части жесткого контактирующего элемента 424 для того, чтобы определить внутреннее давление в глазном яблоке, которое может быть использовано для определения внутриглазного давления во время хирургической операции. Как и в случае с датчиками давления 412, 414 и 416 системы зонда 410, датчики давления 426 и 428 являются оптоволоконными 10 датчиками давления в проиллюстрированном варианте реализации изобретения. Жесткий контактирующий элемент 424 также имеет просвет, проходящий сквозь него, через который протекает замещающая текучая среда в стекловидную камеру 404.
Как проиллюстрировано на фиг. 4, некоторые варианты реализации изобретения могут содержать датчики избыточного давления. Например, датчик давления 428 инфузионной линии 420 можно рассматривать в качестве датчика избыточного давления в связи с наличием датчика давления 414 системы зонда 410. В некоторых вариантах реализации изобретения может быть представлен только один датчик давления для измерения внутреннего давления в глазном яблоке при комбинированном использовании системы зонда 410 и инфузионной линии 420 таким образом, что либо система зонда 410, либо инфузионная линия 420 содержит датчик давления внутри стекловидной камеры 404. Аналогичным образом, в некоторых вариантах реализации изобретения присутствует только один датчик давления окружающей среды. В других вариантах реализации изобретения данные для одного давления получены при использовании множества датчиков давления.
Данные от каждого датчика давления могут быть представлены напрямую или же для определения одного значения может быть использовано математическое суммирование показаний датчиков давления. Использование результатов измерений давления, полученных от датчиков давления, проиллюстрированных на фиг. 4 может позволить хирургу осуществлять более информированное управление 30 системой зонда 410 и инфузионной линией 420 во время хирургической операции.
Фиг. 5A дополнительно иллюстрирует инфузионную линию 420, ранее изображенную на фиг. 4. Как было описано ранее, инфузионная линия 420 содержит относительно более гибкий удлиненный элемент 422, имеющий относительно более жесткий контактирующий элемент 424, прикрепленный на его дистальном конце. Как было описано выше, инфузионная линии 420 используется для подачи замещающей текучей среды в связи с тем, что стекловидное тело удаляется из глазного яблока во время хирургической операции. Как проиллюстрировано на фиг. 5A, инфузионная линия 420 содержит датчики давления 426 и 428, также рассмотренные ранее. В дополнение к датчикам давления 426 и 428 инфузионная линия 420 дополнительно содержит множество датчиков внутреннего давления, размещенных по длине гибкого удлиненного элемента 422. Как проиллюстрировано, эти датчики внутреннего давления содержат датчики давления 502, 504, 506, 508 и 510. Другие варианты реализации изобретения могут содержать большее или меньшее количество датчиков давления. Датчики давления 502-510 расположены на внутренней поверхности гибкого удлиненного элемента 422 или внутри нее таким образом, что они не препятствуют потоку замещающей текучей среды в глазное яблоко пациента, подвергающегося хирургической операции. В то время как датчики давления 502-510 представляют собой оптоволоконные датчики давления, как проиллюстрировано, в других вариантах реализации изобретения могут быть использованы другие типы датчиков давления. Электрические и/или оптические линии обеспечения (присутствует, но конкретно не проиллюстрированы на фиг. 4 и 5А) проходят по длине инфузионной линии 420 для того, чтобы обеспечить питание датчиков давления и двухсторонний обмен данными.
Датчики давления расположены в выемках, сформированных в гибком удлиненном элементе 422. Выемки могут быть сформированы на внутренней или наружной поверхности гибкого удлиненного элемента 422. Сформированные на внутренней или наружной поверхности датчики давления имеют доступ через множество соединенных отверстий в просвете, проходящем сквозь гибкий удлиненный элемент 422, по которому проходит замещающая текучая среда. Например, каждая выемка выполнена в виде выреза на внутренней поверхности внутренней стенки трубки. В некоторых вариантах реализации изобретения выемка подобрана по размеру для приема датчика давления таким образом, что датчик давления находится на одном уровне с внутренней стенкой. В таком положении датчик давления может оказывать минимальное воздействие на проходящий через просвет поток. В других вариантах реализации изобретения выемка является меньшей, чем толщина датчика или большей, чем толщина датчика. Выемка может иметь квадратную форму или любую другую форму, подходящую для приема и размещения датчика давления. Продолговатые выемки предназначены для электрических и/или оптических линий обеспечения. В тех случаях, когда 35 используются оптоволоконные датчики давления, на проксимальном конце инфузионной линии предусмотрен оптоволоконный соединительный элемент для соединения с возможностью связи оптических линий обеспечения от датчиков давления до консоли обработки данных, такой как консоль 102. В некоторых вариантах реализации изобретения используются электрические соединительные элементы вместе с электрическими датчиками давления, такими как пьезоэлектрические датчики давления или датчики давления на основе микроэлектромеханических систем (MЭМС) для мониторинга и передачи показателей давления в точках интереса.
В проиллюстрированной инфузионной линии 420 датчики давления расположены на равных расстояниях друг от друга по длине гибкого удлиненного элемента 422. Промежуток между отдельно расположенными датчиками давления может быть в диапазоне от около 2 дюймов до около 5 дюймов. В некоторых вариантах реализации изобретения это расстояние может находиться в диапазоне от около 2 до около 36 дюймов. Повторяемые одинаковые расстояния между датчиками давления могут обеспечить возможность обнаружения, с помощью консоли, такой как консоль 102 на фиг. 1, местоположения с проблемой потока, такой как препятствие, во время использования инфузионной линии 420. Это может быть сделано путем определения разности давлений по длине инфузионной линии 420. В целом, падение давления по всей инфузионной линии 420 равно разнице давлений, измеренных наиболее проксимальным и наиболее дистальным датчиками. Таким образом, общее падение давления в инфузионной линии 420 может быть вычислено, как давление, измеренное датчиком 502 минус давление, измеренное датчиком 510. Некоторые величины потерь давления от датчика 502 до датчика 510 могут быть допускаемыми или ожидаемыми. Для того чтобы определить проблемные колебания давления может быть использовано изменение порогового значения давления таким образом, что, если величина изменения, измеренная между любыми двумя рядом расположенными или отдельно расположенными датчиками давления, является равной пороговому значению изменения давления или превышает его, срабатывает уведомление.
Например, во время операции, в которой инфузионной линии 420 используется для подачи замещающей текучей среды, гибкий удлиненный элемент 422 может стать скрученным, перекрученным, или иным образом нежелательно расположенным таким образом, что будет частично или полностью препятствовать потоку замещающей текучей среды в камеру стекловидного тела глазного яблока. Как 35 проиллюстрировано, гибкий удлиненный элемент 422 имеет перегиб 512, расположенный между местоположениями датчиков давления 504 и 506. Такие случаи могут вызвать опасное низкое давление внутри глазного яблока, что создает угрозу коллапса. В тех случаях, когда поток временно затруднен, а затем восстановлен, связанный с этим скачок давления может вызвать опасное высокое давление внутри глазного яблока. Включение в состав расположенных через одинаковые промежутки датчиков давления 502-510 обеспечивает измерение и контроль давления по длине гибкого удлиненного элемента 422. Таким образом, варианты реализации изобретения инфузионной линии 422 включают один или более датчиков внутреннего давления для того, чтобы обеспечить полезной информацией хирурга о состоянии линии 420 при использовании инфузионной линии 420.
На фиг. 5В и 5С представлены приводимые в качестве примера графики давления, которое измерено с помощью датчиков давления 502-510 в соответствии с их расстоянием вдоль гибкого удлиненного элемента 422. Как проиллюстрировано на фиг. 5В, х-ось графика представляет расстояние по длине гибкого удлиненного элемента 422, а ось у представляет давление. На графике проиллюстрировано давление внутри гибкого удлиненного элемента в установленный момент времени в положениях соответствующих датчиков давления 502-510, с давлением, измеренным в соответствии с датчиком, указанным в скобках. В связи с перегибом 512 давление в линии 420 является более высоким на проксимальной стороне, чем на дистальной стороне. Таким образом, датчики давления 502 и 504 измеряют значительно более высокое давление, чем измеряют датчики давления 506, 508, 510. Это может быть интерпретировано как указание на присутствие и основное местоположение перегиба 512.
На фиг. 5С представлен приводимый в качестве примера график разности давлений, рассчитанный из измерений давления, которое воспринимается датчиками давления 502-510. Каждое измерение разности давлений является равным разности между измерением данным датчиком давления и измерением ближайшим, более проксимальным датчиком. Таким образом, результатом измерения датчиком разности давлений, связанного с датчиком давления 504, является давление, которое измеряется датчиком давления 504 минус давление, которое измеряется датчиком 502. Как проиллюстрировано, значительная разность давлений наблюдается с помощью датчика давления 506. Это давление отражает разность между проксимальной стороной гибкого удлиненного элемента 422 и дистальной стороной перегиба 512. Эта разность давлений может указывать на присутствие и основное местоположение перегиба 512.
Оба измерения давления, которые представлены на фиг. 5В и 5С могут быть использованы во время хирургической операции. Эта информация может подаваться непрерывно или периодически в процессор данных, присутствующий в консоли 102, показанной на фиг. 1. Консоль 102 может быть выполнена с возможностью обеспечения визуального и/или звукового сигналов тревоги в тех случаях, когда формируется перегиб 512 или препятствие для потока по длине гибкого удлиненного элемента 422, что позволяет разрешить проблему потока, которая определяется с помощью датчиков давления, прежде, чем она причинит вред глазу пациента.
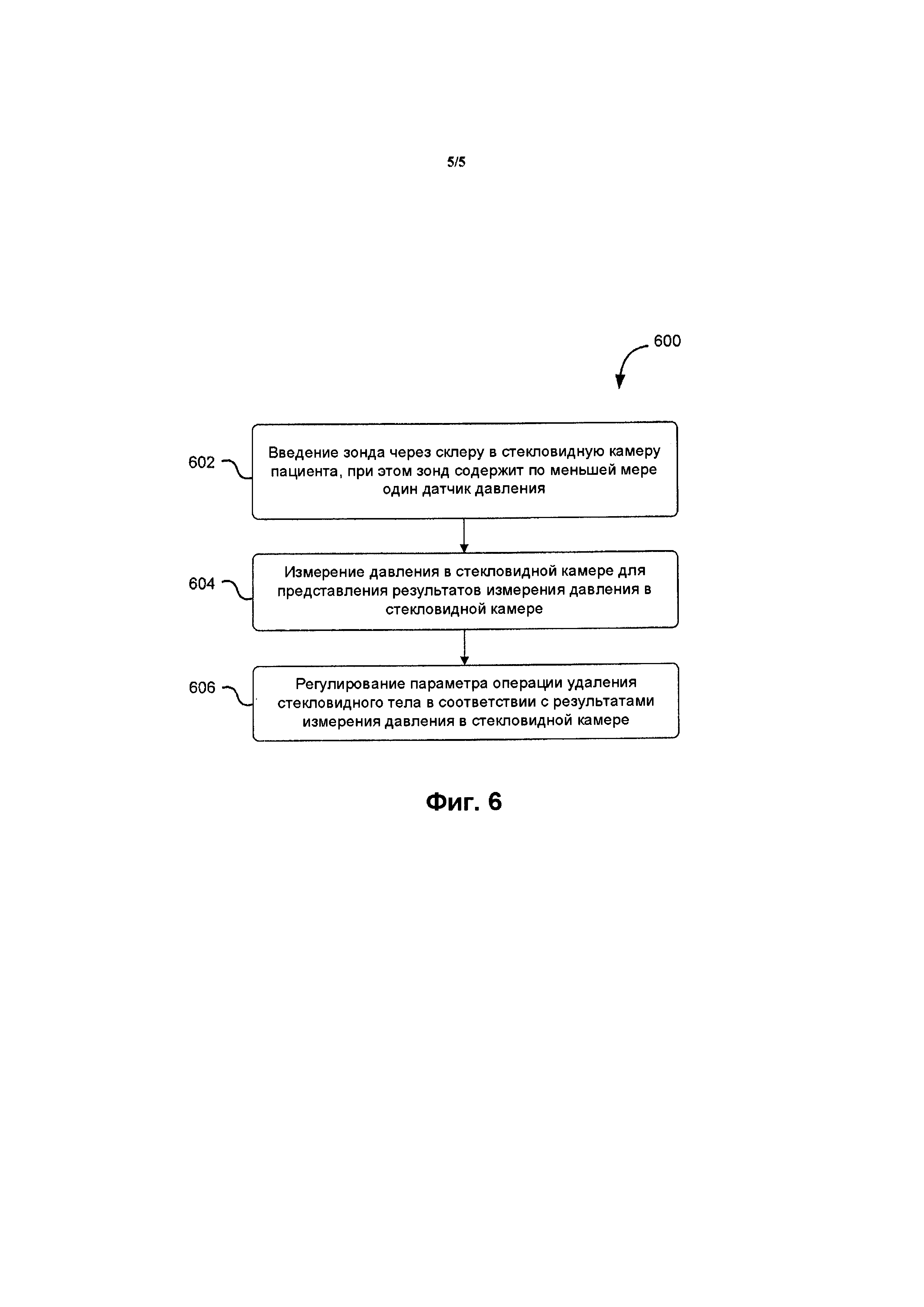
На фиг. 6 представлена функциональная схема способа 600 для лечения офтальмологической патологии. Как проиллюстрировано, способ 600 включает ряд перечисленных этапов, но варианты реализации изобретения способа 600 могут 15 включать дополнительные этапы до, после, и между перечисленными этапами. Проиллюстрированный вариант реализации изобретения начинается на этапе 602, на котором хирург вводит зонд, который содержит по меньшей мере один датчик давления через склеру в стекловидную камеру пациента. На этапе 604, давление в стекловидной камере измеряется с помощью датчика давления для того, чтобы обеспечить измерение давления в стекловидной камере. На этапе 606 операция удаления стекловидного тела корректируется в соответствии с результатами измерения давления в стекловидной камере.
Для того чтобы лучше понять эффективность способа 600 будет сделана ссылка на системы, проиллюстрированные на фиг. 1, 2, 3, 4, и 5A-C, и описанные выше. Например, этап 602 может быть выполнен, когда хирург вводит систему зонда 410 и инфузионной линии 420. Любой или оба из этих двух компонентов, система зонда 410 и инфузионная линия 420, содержат по меньшей мере один датчик давления для достижения измерения давления. Как проиллюстрировано на фиг. 4, система зонда 410 содержит три датчика давления, в то время как инфузионная линия 420 содержит два. Этап 604 может быть выполнен с использованием либо одного или же обоих датчиков давления 428 и 414 для того, чтобы получить измерение давления или измерения внутри стекловидной камеры 404. Полученные данные давления от датчиков давления 428 и/или 414 могут быть переданы на консоль 102, выполненную с возможностью обработки данных.
Консоль 102 передает данные давления хирургу для того, чтобы должным образом регулировать скорость удаления стекловидного тела в соответствии с измеренным давлением в стекловидной камере на этапе 606. В некоторых вариантах реализации изобретения консоль 102 может автоматически регулировать параметры, связанные с операцией удаления стекловидного тела, такие как давление всасывания и/или скорость режущего инструмента. Дополнительно консоль 102 может автоматически регулировать поток замещающей текучей среды, поступающей в стекловидную камеру 404 через инфузионную линию 420. Поток замещающей текучей среды можно также регулировать с помощью хирурга на основании полученных результатов измерений 10 давления.
В дополнение к измерению давления в стекловидной камере различные датчики давления системы зонда 410 и/или инфузионной линии 420 могут быть использованы для измерения других давлений, включая давление окружающей среды и давление всасывания. Эти дополнительные измерения давления могут быть использованы при вычислении разности давлений, такой как внутриглазное давление, что может быть использовано в качестве альтернативы или в дополнение к измерению давления в стекловидной камере. Таким образом, давление, измеренное в любом или во всех местах расположения датчиков давления, может обеспечить хирурга или консоль 102 информацией для мониторинга и 20 корректировки параметров операции в процессе ее выполнения.
Системы и способы, описанные в настоящем документе, могут быть использованы для обеспечения более высокой производительности системы зонда для витрэктомии и хирургических систем, позволяя получить результаты измерения давления от множества областей, представляющих интерес во время хирургической операции. Эта дополнительная информация может позволить хирургу лучше задавать параметры, такие как скорость удаления и/или скорость потока замещающей текучей среды, для поддержания давлений внутри стекловидной камеры 404 на соответствующих уровнях. Аналогичным образом, информация о давлении может позволить автоматическую регулировку этих и других режимов работы с помощью консоли 102. Это может привести к более эффективному лечению и более точным данным, тем самым улучшая общий клинический результат.
Специалистам в данной области будет понятно, что варианты реализации изобретения, охватываемые настоящим описанием, не ограничиваются конкретными приводимыми в качестве примера вариантами реализации изобретения, описанными выше. В этой связи, несмотря на то, что иллюстративные варианты реализации изобретения были показаны и описаны, широкий спектр модификаций, изменений, комбинаций и замен предполагается в вышеприведенном описании. Понятно, что такие изменения могут быть сделаны для вышеизложенного, не отступая от сущности и объема настоящего изобретения. Соответственно, следует принимать во внимание, что прилагаемая формула изобретения понимается в широком смысле и в соответствии с настоящим изобретением.
Реферат
Группа изобретений относится к медицине. Система для обеспечения ирригации в глазу пациента во время медицинской хирургической процедуры содержит инфузионную линию, выполненную с возможностью размещения источника текучей среды в сообщении по текучей среде с глазом пациента. Причем инфузионная линия содержит гибкий удлиненный элемент, имеющий проксимальный конец, дистальный конец и просвет, проходящий сквозь него от проксимального конца к дистальному концу, при этом просвет сконфигурирован для прохождения ирригационной текучей среды в глаз пациента; контактирующий элемент на дистальном конце, причем контактирующий элемент выполнен более жестким по сравнению с указанным гибким удлиненным элементом и сконфигурирован для проникновения в стекловидную камеру глаза пациента; и по меньшей мере три датчика давления, расположенные внутри инфузионной линии и выполненные с возможностью измерения одной или более величин давления в инфузионной линии во время медицинской хирургической процедуры, при этом по меньшей мере три датчика давления выполнены с возможностью определения разности давлений, связанной c помехой на пути потока вдоль инфузионной линии между двумя из по меньшей мере трех датчиков давления таким образом, что помеха на пути потоку может быть расположена между двумя датчиками давления, связанными с разностью давлений, указывающей помеху на пути потока. Способ лечения офтальмологической патологии включает введение зонда через склеру в стекловидную камеру глаза пациента; введение инфузионной линии; измерение давления в стекловидной камере и настройку параметра операции удаления стекловидного тела на основе результатов измерения давления в стекловидной камере. Применение данной группы изобретений позволит повысить эффективность лечения. 3 н. и 17 з.п. ф-лы, 6 ил.
Комментарии