Устройства для хирургии глаза - RU2783788C2
Код документа: RU2783788C2
Чертежи







































Описание
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] В настоящей заявке испрашивается приоритет по одновременно рассматриваемым предварительным патентным заявкам США №№ 62/598,857, поданной 14 декабря 2017 г. и имеющей название «Devices and Methods for Ocular Surgery», и 62/696,769, поданной 11 июля 2018 г. и имеющей название «Devices and Methods for Ocular Surgery», раскрытия которые включены в настоящую заявку путем отсылки в их полном объеме во всех отношениях.
ОБЛАСТЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
[0002] Предлагаемая технология относится, в общем, к устройствам и способам для хирургии глаза в случае, когда одной подобной процедурой является удаление хрусталика из человеческого глаза. В частности, технология относится к захвату, фрагментации и экстракции хрусталиковой или другой ткани во время офтальмологической хирургической операции.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
[0003] Некоторые типы традиционной офтальмологической хирургии требуют измельчения хрусталиковой ткани и твердых внутриглазных объектов, например, интраокулярной линзы, на куски, чтобы их можно было извлечь из глаза. Например, извлечение хрусталиков при хирургии катаракты является одной из наиболее общих областей амбулаторной хирургии, насчитывающей более 3 миллионов случаев, выполняемых ежегодно только в США. Во время операции по удалению катаракты, наиболее распространенным способом извлечения хрусталика является факоэмульсификация, которая включает в себя использование ультразвуковой энергии для измельчения хрусталика и затем аспирации для удаления фрагментов хрусталика посредством инструмента. Другие способы фрагментации и извлечения хрусталика могут включать в себя использование таких инструментов, как крючки, ножи или лазер, чтобы измельчать хрусталик на фрагменты и затем извлекать через разрез в роговице с подходом изнутри. Внутриглазная фрагментация хрусталиковой ткани с подходом изнутри очень важна при хирургии катаракты, чтобы допускать удаление катаракт из разрезов в глазу, которые обычно не превышают 2,8-3,0 мм.
[0004] Однако, существующие инструменты и методы не обеспечивают фрагментацию хрусталика на всю толщину. Данные методы предусматривают подход к хрусталику от передней поверхности глаза, и поэтому силы рассечения, прилагаемые механическими инструментами, ограничены так, что они часто недостаточны для обеспечения сегментации на всю толщину. Кроме того, благодаря хирургическому доступу через разрез на краю роговицы, механический инструмент подводится под углом, по существу, параллельным плоскости, заданной капсулорексисом. В результате, обычный хирургический инструмент для извлечения посредством лассо, петли или проволоки не находится в ориентации, в которой устройство может обернуть хрусталик, чтобы обеспечить фрагментацию или извлечение. Кроме того, даже если бы обычный инструмент мог обернуть хрусталик, что он не может сделать, проволока лассо будет создавать риск приложения чрезмерной повреждающей силы к капсульному мешку, когда ее будут перемещать в заданное положение.
[0005] Подводящие энергию инструменты ограничены в части их способности разрезать секции хрусталика, которые физически близки к другим чувствительным анатомическим структурам, например, капсульному мешку. Например, лазер обычно не применяют для разрезания заднего края хрусталика, потому что он находится в непосредственной близости от заднего края капсульного мешка, при этом хрустали остается не полностью фрагментированным и нуждается в тщательной фрагментации с использованием вспомогательным методов.
[0006] По приведенным причинам, факоэмульсификация стала самым распространенным способом удаления хрусталика. Однако, факоэмульсификация имеет свои недостатки. Когда текучую среду и вещества отсасывают из капсульного мешка и передней камеры, другие текучие среды, например, физиологический раствор нагнетают для поддерживания постоянного объема или давления. Поток текучих сред в глазу во время нагнетания и аспирации может создавать турбулентный поток, который может вредно влиять на ткань внутри глаза, например, эндотелий роговицы. Ультразвуковая энергия, используемая при факоэмульсификация, может оказывать свое отрицательное воздействие на глазную ткань. Кроме того, факоэмульсификация требует дорогого и громоздкого капитального оборудования, ограничивающего места, где можно выполнять факоэмульсификацию.
[0007] Дополнительно, некоторые конфигурации аспирации и нагнетания требуют габаритных единиц капитального оборудования, как в случае факоэмульсификации, или могут нуждаться в определенных средствах, например, настенный источник вакуума, который может быть и недоступен во всех хирургических учреждениях, особенно, в слаборазвитых регионах. Желательной альтернативной будет также недорогая альтернатива с такими же или более высокими характеристиками, например, без потребности в дорогом пульте управления и электронной системе управления.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0008] В одном аспекте описано хирургическое устройство хирургическое устройство для разрезания хрусталика внутри капсульного мешка глаза. Устройство включает в себя стержень, продолжающийся от корпуса вдоль продольной оси устройства. Стержень имеет просвет и дистальный конец. Устройство включает в себя режущий элемент, перемещаемый по просвету стержня. Режущий элемент включает в себя первый рассекающий элемент и второй рассекающий элемент. Каждый из первого и второго рассекающих элементов имеет первый конец, второй конец и дистальную петлю, сформированную между первым и вторым концами. Устройство включает в себя исполнительный механизм, имеющий рабочее соединение с режущим элементом. Режущий элемент выполнен с возможностью перехода из первой, отведенной конфигурации в направлении ко второй развернутой конфигурации, при первом приведении в действие исполнительного механизма. При нахождении во второй развернутой конфигурации, дистальная петля каждого из первого и второго рассекающих элементов образует увеличенную раскрытую область, расположенную снаружи дистального конца стержня, при этом увеличенная раскрытая область имеет первую ножку, выдвинутую дистально относительно дистального конца стержня, и вторую ножку, расположенную проксимально относительно дистального конца стержня.
[0009] Когда режущий элемент находится во второй развернутой конфигурации, дистальные петли, образующие увеличенные раскрытые области каждого из первого и второго рассекающих элементов, могут быть выровненными, в общем, в плоскости параллельно друг другу. Второе приведение в действие исполнительного механизма или второго, другого исполнительного механизма может вынуждать дистальную петлю, образующую увеличенную раскрытую область одного из первого и второго рассекающих элементов, перемещаться в угловом направлении относительно плоскости, с переводом режущего элемента в третью, отклоненную конфигурацию. Второе приведение в действие исполнительного механизма или второго, другого исполнительного механизма может вынуждать дистальную петлю, образующую увеличенную раскрытую область как первого, так и второго рассекающих элементов, перемещаться в угловом направлении друг от друга, с переводом режущего элемента в третью, отклоненную конфигурацию.
[0010] Устройство может дополнительно включать в себя промежуточный рассекающий элемент, расположенный между первым и вторым рассекающими элементами. Промежуточный рассекающий элемент также может иметь первый конец, второй конец и дистальную петлю, сформированную между первым и вторым концами. Когда режущий элемент находится во второй развернутой конфигурации, дистальная петля промежуточного рассекающего элемента может образовать увеличенную раскрытую область, расположенную снаружи дистального конца стержня. Увеличенная раскрытая область промежуточного рассекающего элемента может иметь первую ножку, выдвинутую дистально относительно дистального конца стержня, и вторую ножку, расположенную проксимально относительно дистального конца стержня. Когда режущий элемент находится во второй развернутой конфигурации, дистальные петли, образующие увеличенные раскрытые области каждого из первого, второго и промежуточного рассекающих элементов могут быть выровненными, в общем, в плоскости параллельно друг другу. Второе приведение в действие исполнительного механизма или второго, другого исполнительного механизма может вынуждать дистальные петли, образующие увеличенные раскрытые области обоих, первого и второго рассекающих элементов, перемещаться в угловом направлении от промежуточного рассекающего элемента, с переводом режущего элемента в третью, отклоненную конфигурацию. Первый и второй рассекающие элементы могут перемещаться в диапазоне от приблизительно 15 градусов до приблизительно 45 градусов относительно плоскости, при этом плоскость является, по существу, вертикальной плоскостью.
[0011] Первые концы и вторые концы каждого из первого и второго рассекающих элементов могут быть передвигаемыми относительно стержня. Первые концы могут быть аксиально передвигаемыми вдоль продольной оси устройства. Вторые концы могут быть передвигаемыми в угловом направлении относительно продольной оси устройства. Первые концы каждого из первого и второго рассекающих элементов могут быть передвигаемыми относительно продольной оси устройства, и вторые концы каждого из первого и второго рассекающих элементов могут быть зафиксированы относительно продольной оси устройства. Первые концы могут быть аксиально передвигаемыми вдоль продольной оси устройства и передвигаемыми в угловом направлении относительно продольной оси устройства.
[0012] Исполнительный механизм может быть движком, передвигаемым вдоль продольной оси корпуса. Устройство может дополнительно включать в себя передвижной узел, расположенный внутри корпуса и соединенный для перемещения с движком относительно корпуса. Передвижной узел может включать в себя держатель первой петли, соединенный с первым рассекающим элементом, и держатель второй петли, соединенный со вторым рассекающим элементом. Перемещение движка на первое расстояние в дистальном направлении относительно корпуса может поступательно переместить передвижной узел в дистальном направлении, что вынуждает дистальные петли первого и второго рассекающих элементов образовать увеличенные раскрытые области и перевести режущий элемент в направлении ко второй развернутой конфигурации. Перемещение движка на второе расстояние в дистальном направлении, больше первого расстояния, может вынуждать дистальные петли, образующие увеличенные раскрытые области первого и второго рассекающих элементов, переместиться в угловом направлении друг от друга, с переводом режущего элемента в третью, отклоненную конфигурацию. Держатель первой петли может быть выполнен с возможностью поворота вокруг первой оси вращения в первом направлении, и держатель второй петли может быть выполнен с возможностью поворота вокруг второй оси вращения во втором направлении, противоположном первому направлению. Поворот держателя первой петли вокруг первой оси вращения может вынуждать дистальную петлю первого рассекающего элемента отклоняться в первом направлении, и поворот держателя второй петли вокруг второй оси вращения может вынуждать дистальную петлю второго рассекающего элемента отклоняться во втором, противоположном направлении. Перемещение движка на второе расстояние в дистальном направлении, больше первого расстояния, может повернуть первый и второй держатели петель вокруг их осей вращения, с переводом режущего элемента в направлении к третьей, отклоненной конфигурации. Устройство может дополнительно включать в себя клин, расположенный внутри дистальной концевой области корпуса. Перемещение движка на второе расстояние в дистальном направлении, больше первого расстояния, может поджимать первый и второй держатели петель к клину, что вынуждает держатель первой петли повернуться вокруг первой оси вращения в первом направлении, и вынуждает держатель второй петли повернуться вокруг второй оси вращения во втором, противоположном направлении, с приведением дистальных петель, образующих увеличенные раскрытые области первого и второго рассекающих элементов, к отклонению в разные стороны. Клин может быть неподвижным или может быть передвигаемым в проксимальном направлении, при приведении в действие второго, другого исполнительного механизма. Перемещение клина в проксимальном направлении может поджимать клин к первому и второму держателям петель, что вынуждает держатель первой петли повернуться вокруг первой оси вращения в первом направлении и вынуждает держатель второй петли повернуться вокруг второй оси вращения во втором, противоположном направлении, с приведением дистальных петель, образующих увеличенные раскрытые области первого и второго рассекающих элементов, к отклонению в разные стороны. Клин может быть передвигаемыми в проксимальном направлении, чтобы вызывать отклонение первого и второго держателей петель независимо от относительного местоположения передвижного узла вдоль продольной оси устройства.
[0013] Когда режущий элемент находится во второй, расширенной конфигурации, дистальные петли, образующие увеличенные раскрытые области первого и второго рассекающих элементов, могут иметь, в общем, овальную форму и иметь максимальную ширину от приблизительно 4,0 мм до приблизительно 20 мм и максимальную высоту от приблизительно 1,0 мм до приблизительно 15 мм. Дистальные петли, образующие увеличенные раскрытые области первого и второго рассекающих элементов, могут быть выполнены с возможностью отклонения в угловом направлении друг от друга, с переводом режущего элемента в третью, отклоненную конфигурацию, независимо от размера увеличенных раскрытых областей. Размер увеличенных раскрытых областей первого и второго рассекающих элементов до отклонения может быть выбираемым. Устройство может дополнительно включать в себя регулятор, выполненный с возможностью изменения относительного расстояния между клином и передвижным узлом. Меньшее относительное расстояние может обеспечивать меньшую раскрытую область первого и второго рассекающих элементов во второй, развернутой конфигурации до отклонения, и большее относительное расстояние может обеспечивать большую по размеру раскрытую область первого и второго рассекающих элементов до отклонения.
[0014] Во взаимосвязанном варианте осуществления описано хирургическое устройство для разрезания хрусталика внутри капсульного мешка глаза, которое включает в себя a стержень, продолжающийся от корпуса вдоль продольной оси устройства. Стержень имеет просвет и дистальный конец. Устройство включает в себя режущий элемент, перемещаемый по просвету стержня. Режущий элемент включает в себя, по меньшей мере, первый рассекающий элемент, имеющий первый конец, второй конец и дистальную петлю, сформированную между первым и вторым концами. Устройство включает в себя движок, имеющий рабочее соединение с режущим элементом и передвигаемый вдоль продольной оси корпуса. Устройство включает в себя механизм счета ходов, соединенный с движком и заключенный внутри корпуса. Режущий элемент выполнен с возможностью перехода из первой, отведенной конфигурации в направлении ко второй, развернутой конфигурации, при дистальном выдвижении движка. При нахождении во второй, развернутой конфигурации, дистальная петля, по меньшей мере, первого рассекающего элемента образует увеличенную раскрытую область, расположенную снаружи дистального конца стержня, при этом увеличенная раскрытая область имеет первую ножку, выдвинутую дистально относительно дистального конца стержня, и вторую ножку, расположенную проксимально относительно дистального конца стержня. Механизм счета ходов выполнен с возможностью слежения за дистальными выдвижениями и/или проксимальными выдвижениями движка.
[0015] Механизм счета ходов может быть выполнен с возможностью вызова акта блокировки, которое препятствует дистальному выдвижению движка после акта блокировки. Механизм счета ходов может включать в себя цилиндрический счетный барабан, содержащий множество наклонных кулачков; жесткий стопор; и пару наклонных направляющих движка, выполненных по форме и расположению с возможностью зацепления с множеством наклонных кулачков на счетном барабане, что вызывает вращение счетного барабана вокруг продольной оси устройства. Каждое дистальное выдвижение движка может повернуть цилиндрический счетный барабан на долю полного оборота вокруг продольной оси устройства. Цилиндрический счетный барабан может быть выполнен с возможностью поворота на вплоть до приблизительно 24 долей прежде, чем происходит акт блокировки. Акт блокировки может блокировать дистальное выдвижение движка и допускает проксимальное отведение движка. Движок может быть выполнен с возможностью выполнения от приблизительно 3 до приблизительно 30 ходов выдвижения в дистальном направлении прежде, чем происходит акт блокировки, и движок запирается в заднем положении.
[0016] Устройство может включать в себя элемент сигнализации блокировки. Элемент сигнализации блокировки может включать в себя окно сигнализации блокировки, продолжающееся сквозь корпус и обеспечивающее визуальную индикацию положения счетного барабана в корпусе относительно жесткого стопора механизма счета ходов. Счетный барабан может быть аксиально передвигаемым внутри корпуса и иметь внешнюю поверхность, имеющую цвет, который контрастирует с цветом корпуса. Когда счетный барабан располагается около окна сигнализации блокировки, цвет счетного барабана может наблюдаться через окно сигнализации блокировки, обеспечивая индикацию дистальных выдвижений движка, имеющихся в распоряжении до того, как произойдет акт блокировки. Счетный барабан может содержать последовательность меток на внешней поверхности и фиксироваться относительно окна сигнализации блокировки. Последовательность меток может указывать число дистальных выдвижений, выполненных движком.
[0017] Движок может дополнительно включать в себя затворное окно. Когда движок перемещают в направлении к дистальной концевой области корпуса, затворное окно движка и окно сигнализации блокировки корпуса могут совмещаться, открывая последовательность меток на барабане. Когда движок перемещают проксимально от дистальной концевой области корпуса, затворное окно движка и окно сигнализации блокировки корпуса не могут совмещаться, и последовательность меток на барабане не заметна.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0018] Приведенные и другие аспекты подробно описаны в дальнейшем со ссылкой на нижеследующие чертежи. Вообще говоря, фигуры выполнены не в масштабе в абсолютном или относительном смысле, но предназначены для иллюстрации. Кроме того, относительно размещение признаков или элементов может быть видоизменено с целью ясности изображения.
[0019] Фиг. 1 - схематический вид сбоку анатомии глаза, с демонстрацией введения стержня и рассекающего элемента через разрез в боковой поверхности роговицы.
[0020] Фиг. 2 - вид сверху рассекающего элемента в развернутом положении.
[0021] Фиг. 3 - вид в перспективе капсульного мешка с выполненным капсулорексисом, с рассекающим элементом в первой, отведенной конфигурации для введения.
[0022] Фиг. 4 - вид в перспективе капсульного мешка с выполненным капсулорексисом, с рассекающим элементом во второй, развернутой конфигурации для захвата.
[0023] Фиг. 5 - вид в перспективе капсульного мешка с выполненным капсулорексисом, с рассекающим элементом в третьем положении фрагментации.
[0024] Фиг. 6 - вид в перспективе хрусталика, показанного на фиг. 5, при этом рассекающий элемент не показан для ясности.
[0025] Фиг. 7 - вид в перспективе хрусталика, показанного на фиг. 5, при этом рассекающий элемент и капсульный мешок не показаны для ясности.
[0026] Фиг. 8 - вид в перспективе хирургического устройства, включающего в себя рукоятку, стержень и несколько рассекающих элементов.
[0027] Фиг. 9 - вид в перспективе хирургического устройства, показанного на фиг. 8, с рассекающими элементами в первой, отведенной конфигурации.
[0028] Фиг. 10 - вид в перспективе хирургического устройства, показанного на фиг. 8, с левым движком, выдвинутым вперед для развертывания левого рассекающего элемента в направлении ко второй, развернутой конфигурации.
[0029] Фиг. 11 - вид в перспективе хирургического устройства, показанного на фиг. 8, с левым движком, полностью выдвинутым вперед для развертывания левого рассекающего элемента во вторую, развернутую конфигурация.
[0030] Фиг. 12 - вид в перспективе хирургического устройства, показанного на фиг. 8, с правым движком, выдвинутым вперед для развертывания правого рассекающего элемента в направлении ко второй, развернутой конфигурации.
[0031] Фиг. 13 - вид в перспективе хирургического устройства, показанного на фиг. 8, с правым движком, полностью выдвинутым вперед для развертывания правого рассекающего элемента во вторую, развернутую конфигурация.
[0032] Фиг. 14 - вид в перспективе, подобный фиг. 13, показывающий рассекающие элементы относительно хрусталика.
[0033] Фиг. 15 - детализированный вид в перспективе дистального конца хирургического устройства, показанного на фиг. 8.
[0034] Фиг. 16 - вид в перспективе с разрезом рукоятки, с правым движком в его исходном положении.
[0035] Фиг. 17 - подробный вид в перспективе части рукоятки, показанной на фиг. 16.
[0036] Фиг. 18 - подробный вид в перспективе другой части рукоятки, показанной на фиг. 16.
[0037] Фиг. 19 - подробный вид в перспективе рукоятки, показанной на фиг. 16-18, с правым движком, частично продвинутым вперед.
[0038] Фиг. 20 - подробный вид в перспективе рукоятки, показанной на фиг. 16-18, с правым движком, продвинутым вперед дальше в дистальном направлении, чем в его положении на фиг. 19.
[0039] Фиг. 21 - подробный вид в перспективе рукоятки, показанной на фиг. 16-18, с правым движком, возвращенным в направлении к его исходному положению.
[0040] Фиг. 22 - подробный вид в перспективе рукоятки, показанной на фиг. 16-18, с правым движком, возвращенным в его исходное положение.
[0041] Фиг. 23 - вид сбоку другого варианта осуществления двух рассекающих элементов, продолжающихся из стержня для охвата хрусталика.
[0042] Фиг. 24A - вид в перспективе другого варианта исполнения хирургического устройства, включающего в себя рукоятку, стержень и несколько рассекающих элементов перед развертыванием.
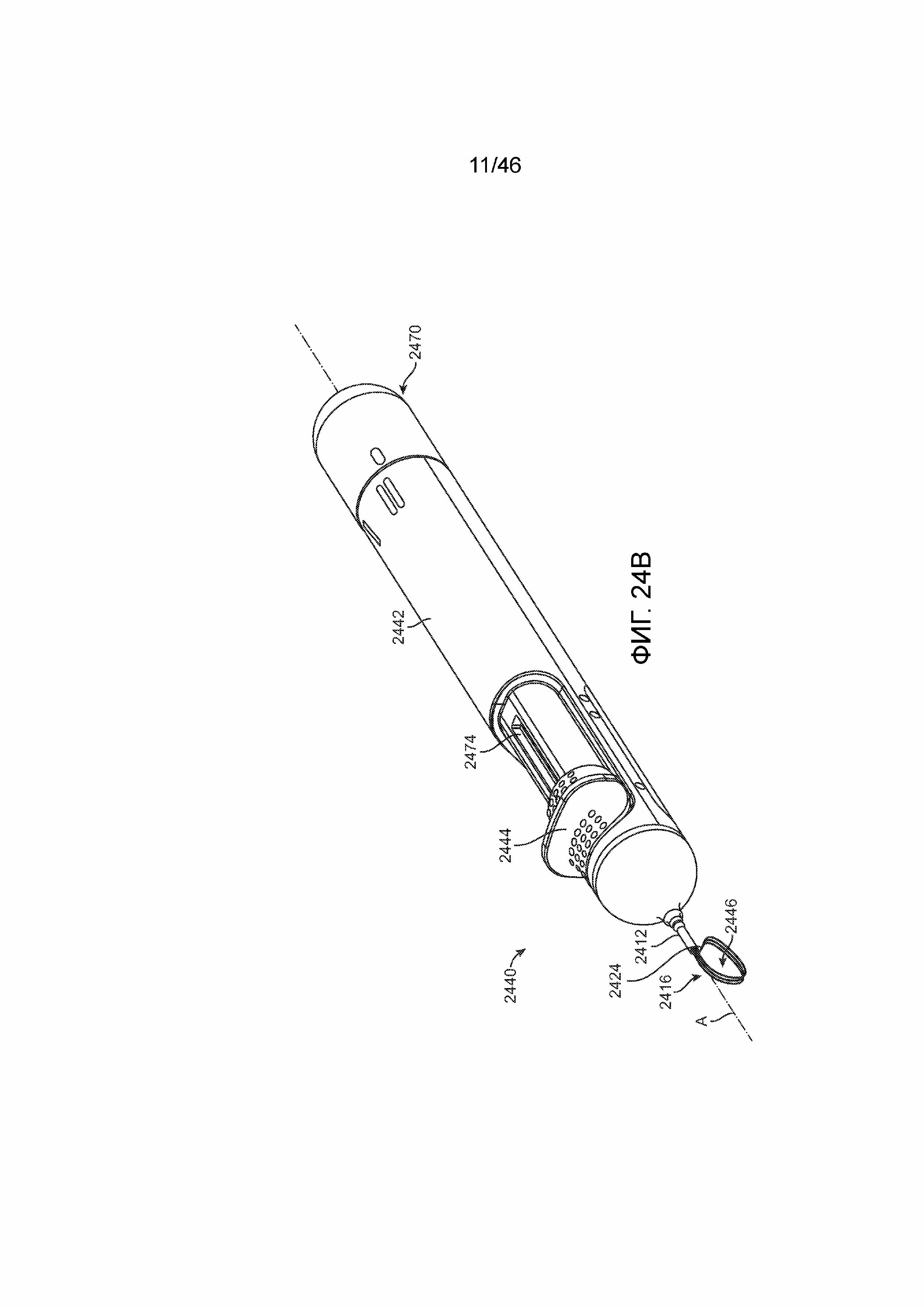
[0043] Фиг. 24B - вид в перспективе устройства, показанного на фиг. 24A, во второй, развернутой конфигурации.
[0044] Фиг. 24C - вид в перспективе устройства, показанного на фиг. 24B, в третьей, отклоненной конфигурации.
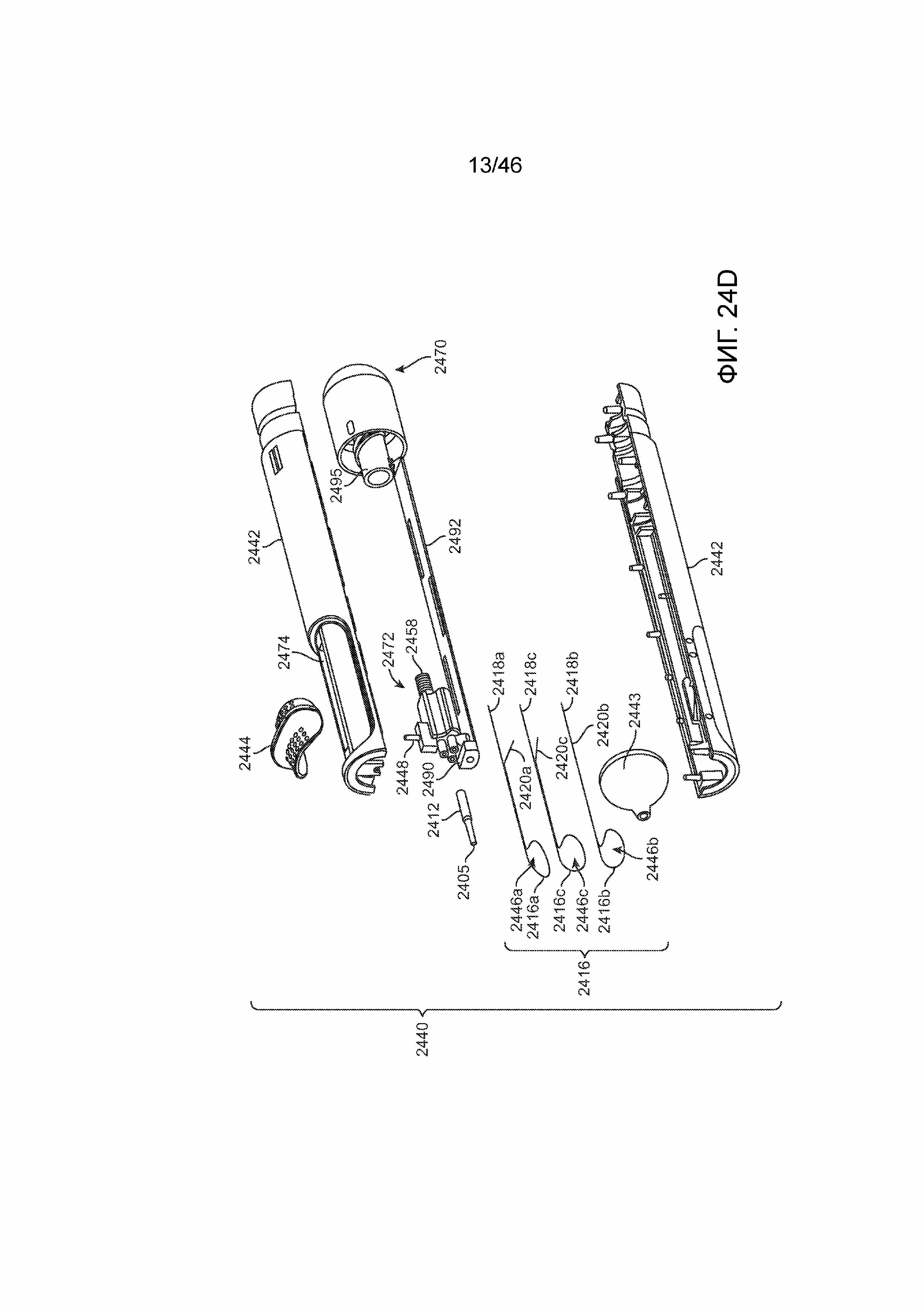
[0045] Фиг. 24D - покомпонентный вид устройства, показанного на фиг. 24A, содержащего три рассекающих элемента.
[0046] Фиг. 24E - покомпонентный вид другого варианта исполнения устройства, показанного на фиг. 24A, содержащего два рассекающих элемента.
[0047] Фиг. 25A - подробный вид в перспективе устройства, показанного на фиг. 24A, охватывающего хрусталик.
[0048] Фиг. 25B-25C - подробные виды в перспективе устройства, показанного на фиг. 25A, после натяжения и разрезания хрусталика.
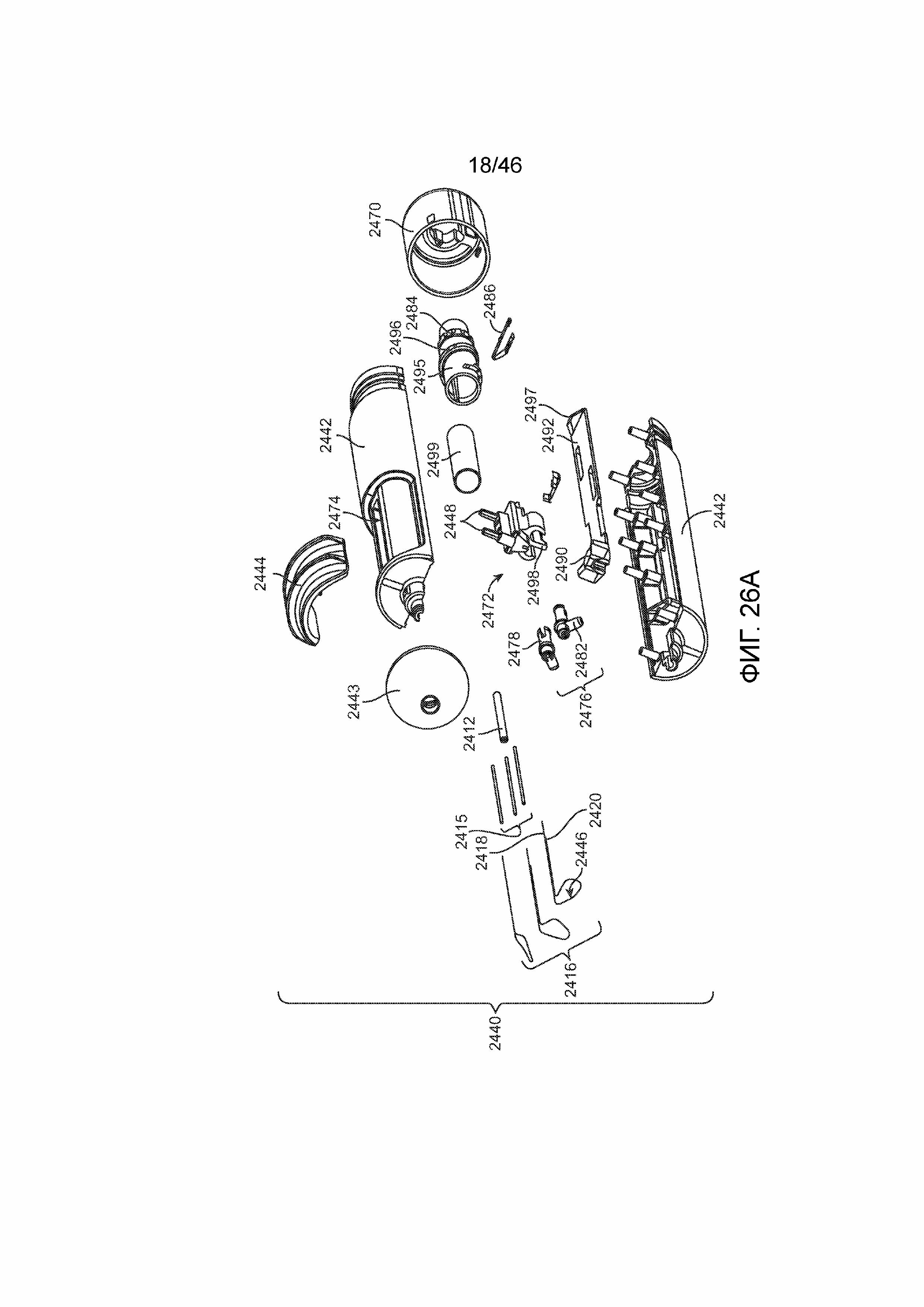
[0049] Фиг. 26A - покомпонентный вид устройства, показанного на фиг. 24A, включающего в себя механизм двухфазного размещения.
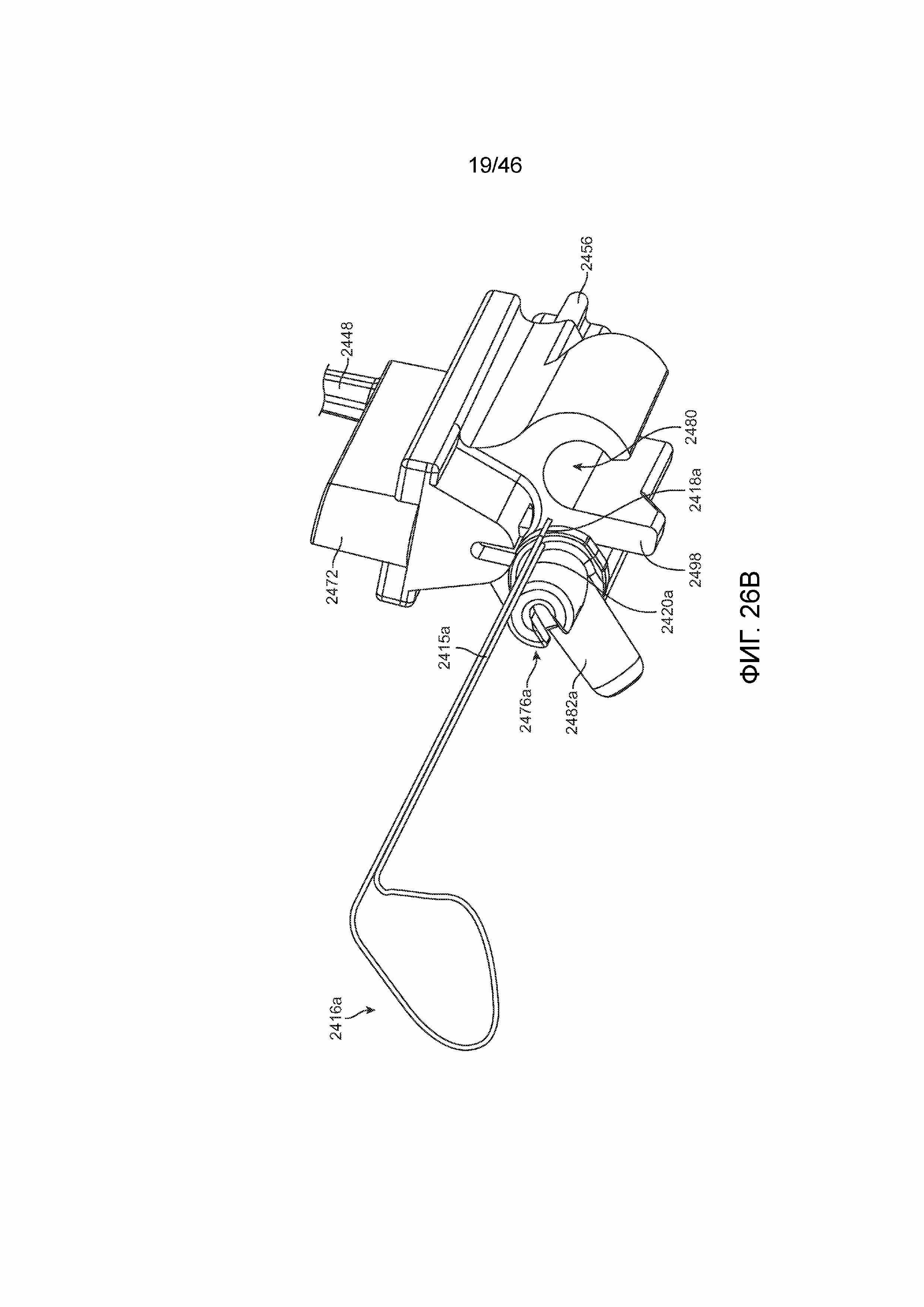
[0050] Фиг. 26B - частичный вид в перспективе устройства, показанного на фиг. 24A, изображающий передвижной узел и держатели петель.
[0051] Фиг. 26C - частичный вид с торца устройства, показанного на фиг. 24A.
[0052] Фиг. 26D - частичный вид в перспективе, изображающий держатель петли устройства, показанного на фиг. 24A, до отклонения.
[0053] Фиг. 26E - частичный вид в перспективе, изображающий держатель петли устройства, показанного на фиг. 24A, после отклонения.
[0054] Фиг. 26F - вид сверху в плане клина устройства, показанного на фиг. 24A.
[0055] Фиг. 26G-26H - изображения механизма регулировки развертывания устройства, показанного на фиг. 24A.
[0056] Фиг. 26I-26L - различные виды механизма регулировки развертывания.
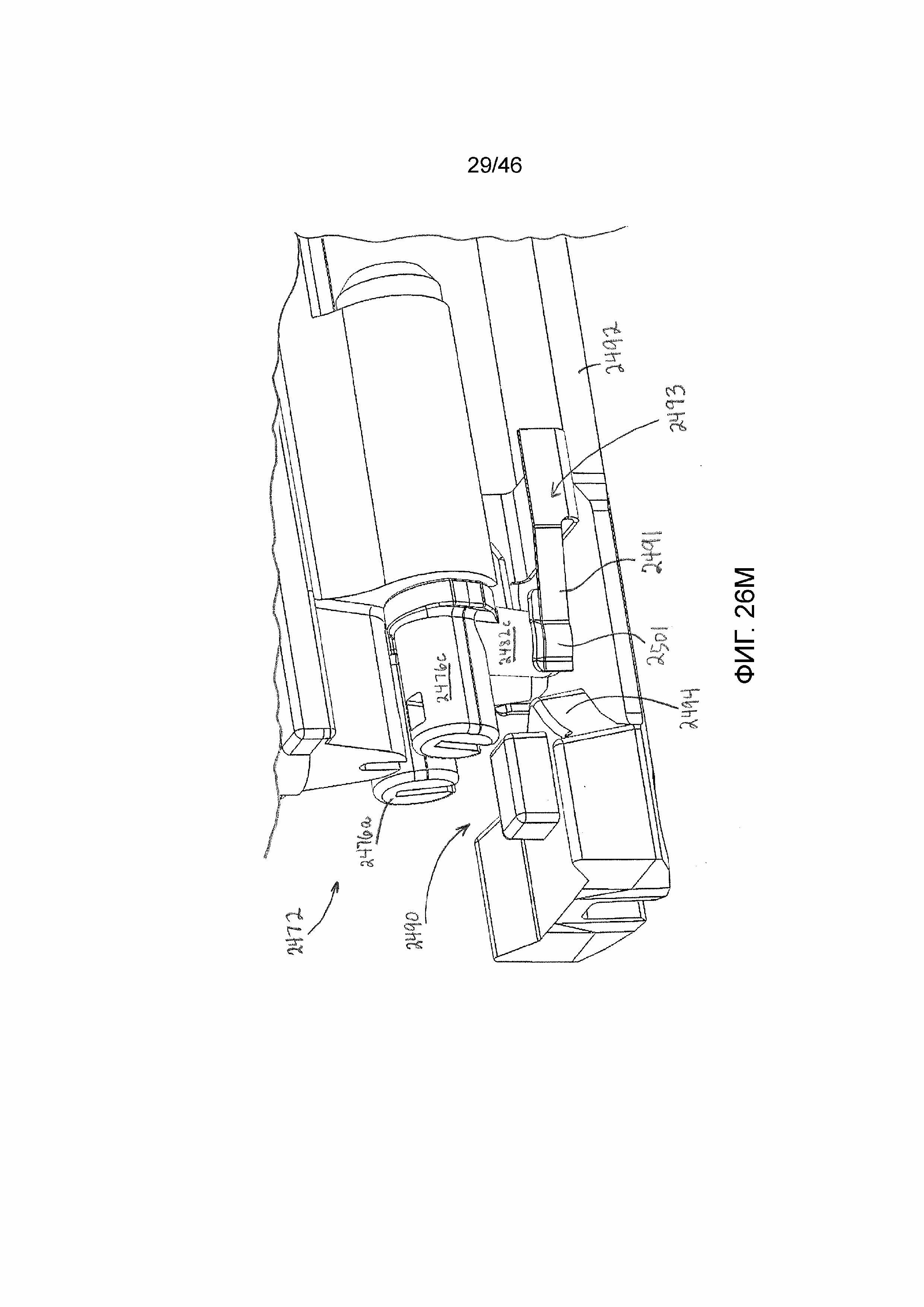
[0057] Фиг. 26M - частичный вид в перспективе держателя петли устройства, показанного на фиг. 24A, до отклонения, с изображением элемента обратной связи с пользователем.
[0058] Фиг. 26N - вид сверху в плане элемента обратной связи с пользователем, показанного на фиг. 26M.
[0059] Фиг. 27A-27C - изображения варианта исполнения механизма счета ходов.
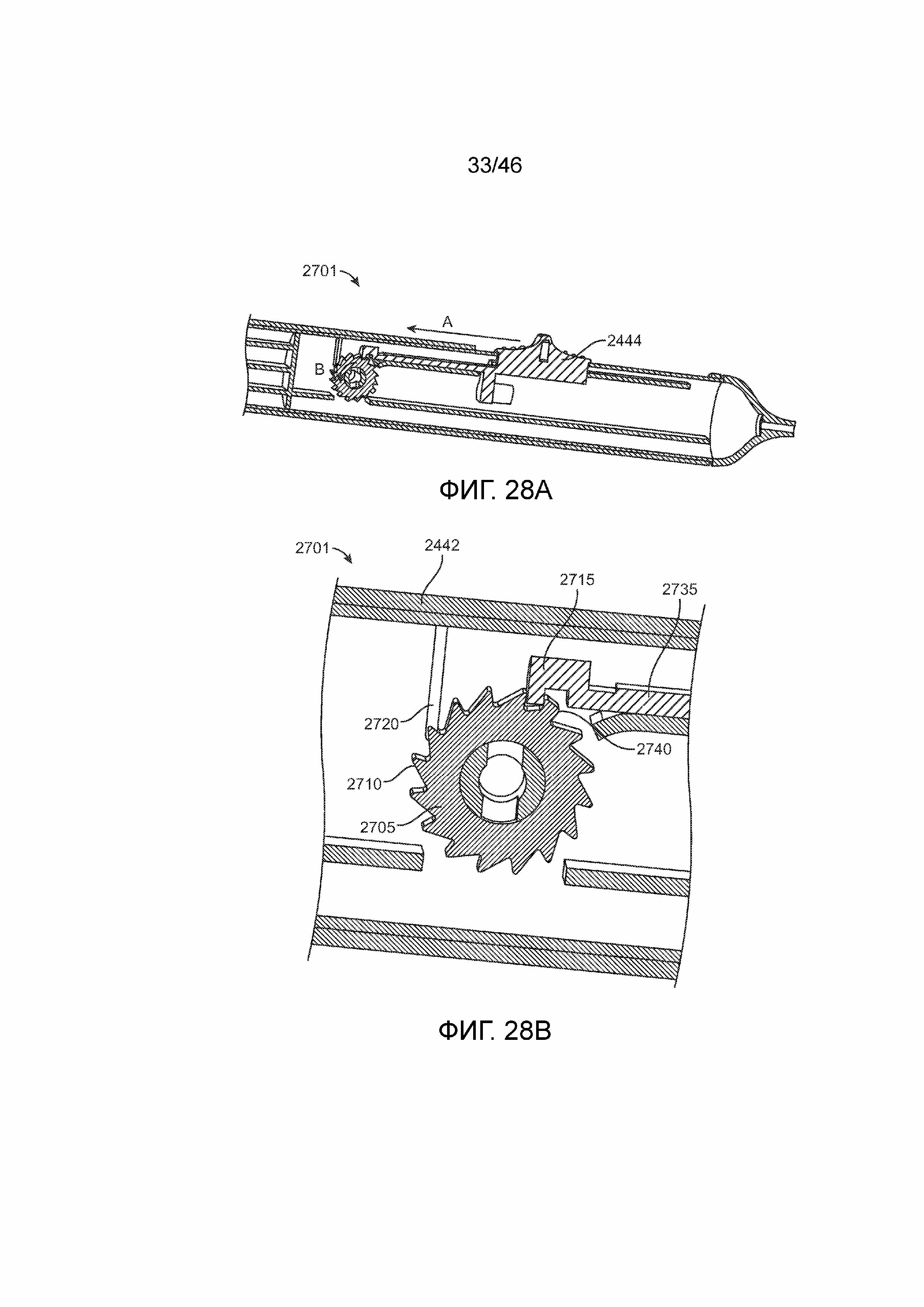
[0060] Фиг. 28A-28B - изображения другого варианта исполнения механизма счета ходов.
[0061] Фиг. 29A-29B - изображения другого варианта исполнения механизма счета ходов.
[0062] Фиг. 30A-30E - изображения другого варианта исполнения механизма счета ходов.
[0063] Фиг. 31A - вид в перспективе другого варианта исполнения устройства, включающего в себя механизм счета ходов.
[0064] Фиг. 31B - вид с частичным разрезом устройства, показанного на фиг. 31A.
[0065] Фиг. 31C - вариант исполнения счетного барабана.
[0066] Фиг. 31D - изображение наклонных направляющих движка, выполненных с возможностью зацепления со счетным барабаном, показанным на фиг. 31C.
[0067] Фиг. 31E - изображение счетного барабана, показанного на фиг. 31C относительно движка.
[0068] Фиг. 31F - изображение варианта исполнения сигнализации блокировки для устройства, показанного на фиг. 31A.
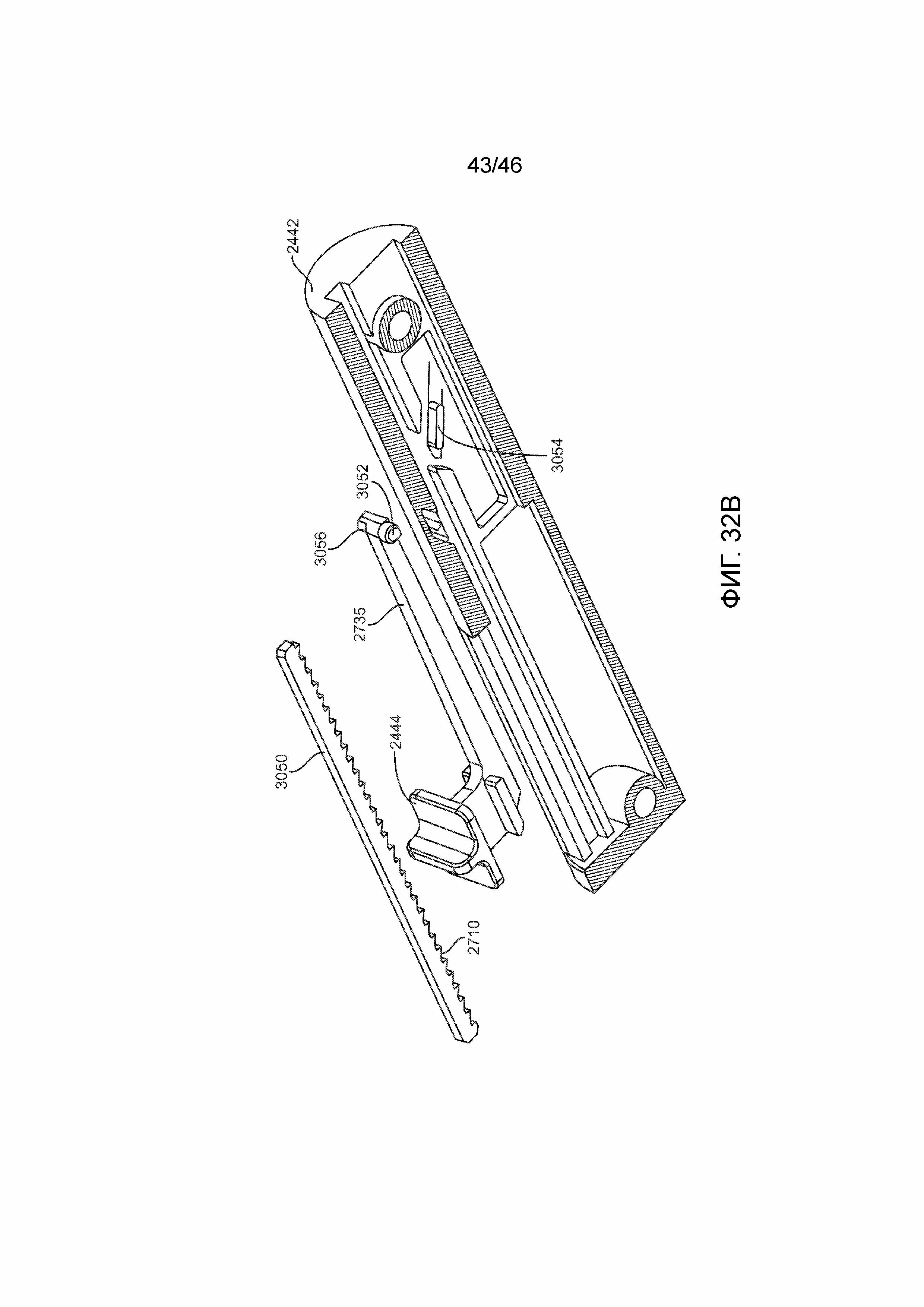
[0069] Фиг. 32A-32B - изображения другого варианта исполнения механизма счета ходов.
[0070] Фиг. 33A-33C - изображения вариантов исполнения рассекающих элементов, сформированных из длинной узкой полосы материала.
[0071] Следует понимать, что чертежи приведены только в виде примера и не предусматривают выполнения в масштабе. Следует понимать, что устройства, описанные в настоящей заявке, могут включать в себя признаки, не обязательно изображенные на каждой фигуре.
ПОДРОБНОЕ ОПИСАНИЕ
[0072] В настоящей заявке описаны способы и устройства для внутриглазной фрагментации и удаления хрусталика и других тканей во время внутриглазного оперативного вмешательства. Устройства, описанные в настоящей заявке, допускают извлечение ткани из передней камеры без повреждения других структур глаза. В различных осуществлениях описано офтальмологическое хирургическое устройство, которое использует режущие струны, петли, нити, лассо и тому подобное, которые предназначены для зацепления и фрагментации хрусталиковой ткани и помощи при ее удалении из глаза с минимально инвазивным подходом изнутри. В одном аспекте предложено ручное устройство, которое может также приводиться в действие (вручную) пользователем и не требует электронной системы управления. Устройства, описанные в настоящей заявке, выполнены с возможностью точно регулируемой и индивидуальной установки, которая может происходить в два этапа (т.е. развертывание и поворот или развертывание и отклонение) или в три этапа (т.е. развертывание, поворот и отклонение).
[0073] Далее на фигурах, фиг. 1 показывает нормальную анатомию глаза 1, включающего в себя роговицу 2, капсульный мешок 6 и хрусталик 8 внутри капсульного мешкам 6. Во время катарактальной процедуры, на краю роговицы 2 можно выполнить разрез 4, чтобы получить доступ к капсульному мешку 6. Хирург формирует капсулорексис 10 на передней поверхности капсульного мешка 6. Капсулорексис 10 можно выполнять любым подходящим способом, например, разрезанием скальпелем, подведением энергии фемтосекундным лазером или другим энергетическим режущим инструментом, разрезанием с роботизированным или автоматизированным управлением или любым другим подходящим способом. Капсулорексис 10 может быть иссечен или вырезан диаметром, приблизительно, от 2,0 мм до 8,0 мм. Капсулорексис 10 может быть выполнен с диаметром меньше, чем 2,0 мм, в частности, когда фрагменты хрусталика 8 (как подробнее описано ниже) имеют достаточно малые размеры для извлечения через капсулорексис 10 меньшего диаметра. Капсулорексис 10 можно выполнять отдельным набором инструментов, например, микроножницами, как это делается в большинстве случаев. Желательно обеспечить минимальный размер роговичного разреза. Например, роговичные разрезы, которые являются самогерметизирующимися и не требуют наложения швов для закрытия, являются оптимальными для минимально инвазивной хирургии с наименьшим риском осложнений. Устройства, описанные в настоящей заявке, предназначены для минимизации размера разреза, необходимого для выполнения фрагментации и удаления хрусталика.
[0074] Как показано также на фиг. 3, затем стержень 12 вводят через разрез 4 в роговицу 2. Как видно на фиг. 3, дистальный конец стержня 12 располагается выше (т.е. спереди от) капсулорексиса 10, на расстоянии от капсулорексиса 10, но располагается внутри окружности капсулорексиса 10, если смотреть снаружи глаза 1. Как видно на фиг. 1, стержень 12 обычно находится параллельно плоскости, заданной кромками капсулорексиса 10, после его введения через разрез 4 в роговице 2. В некоторых вариантах осуществления, дистальный конец рассекающего элемента 16 продолжается из выходного отверстия 5 в просвете 14 на дистальном конце стержня 12 в первой, отведенной конфигурации. В таких вариантах осуществления, изгиб 24 малого радиуса может располагаться снаружи стержня 12, уже изогнутый, по меньшей мере, частично в проксимальном направлении. Таким образом, даже в вариантах осуществления, в которых рассекающий элемент 16 изготовлен из сверхупругого материала, угол, под которым участки рассекающего элемента 16 изгибаются во время перехода из первой, отведенной конфигурации во вторую, развернутую конфигурацию, уменьшается. Кроме того, внутри просвета 14 стержня 12 требуется меньше пространства для удерживания части рассекающего элемента 16, чем для удерживания его целиком, что позволяет изготавливать стержень 12 меньшего диаметра. В соответствии с некоторыми вариантами осуществления, стержень 12 трубкой с овулярным поперечным сечением, со скругленным наконечником. Овулярное поперечное сечение дополняет возможность введения стержня 12 в глаз 1 через роговичный разрез 4. Кроме того, в случае, если существует несколько рассекающих элементов, их можно легче расположить рядом в просвете 14 стержня 12 с овулярным поперечным сечением. В качестве альтернативы, стержень 12 может иметь круглое поперечное сечение или поперечное сечение любой другой подходящей формы. Проксимальный конец рассекающего элемента 16 продолжается по просвету 14 стержня 12. В качестве альтернативы, весь рассекающий элемент 16 располагается внутри просвета 14 стержня 12 в первой, отведенной конфигурации. В качестве альтернативы используется, по меньшей мере, два рассекающих элемента 16, при этом каждый рассекающий элемент 16 первоначально находится в первой, отведенной конфигурации. Хотя в отношении данного конкретного варианта осуществления описывается один рассекающий элемент 16 для ясности, в свете дальнейшего раскрытия будет очевидно, что в одной процедуре удаления хрусталика можно обеспечить и использовать любое подходящее число рассекающих элементов 16, и что устройства и способы, описанные в настоящей заявке не ограничены применением любого конкретного числа рассекающих элементов 16. Родственные устройства, имеющие рассекающие элементы, подобные описанным в настоящей заявке, описаны в патенте США № 9,775,743 и патенте США № 9,629,747, каждый из которых в полном объеме включен путем отсылки в настоящую заявку.
[0075] В соответствии с некоторыми вариантами осуществления, рассекающий элемент 16 включает в себя первый конец 18 и второй конец 20. Как подробно описано ниже со ссылкой на фиг. 16-22, один из концов 18, 20 рассекающего элемента 16 может быть передвигаемым относительно стержня 12, тогда как другой из концов 18, 20 рассекающего элемента 16 может быть зафиксированным относительно стержня 12. Например, второй конец 20 рассекающего элемента 16 может быть зафиксированным относительно стержня 12, и первый конец 18 рассекающего элемента 16 может быть передвижным относительно стержня 12. Второй конец 20 может быть соединен со стержнем 12 или другой конструкцией посредством обжима, сварки, склеивания, механических запорных устройств или любой(ого) другой(ого) подходящей(его) конструкции или способа. В некоторых вариантах осуществления, рассекающий элемент 16 является с круглым, овальным или другим атравматическим поперечным сечением. В других вариантах осуществления, рассекающий элемент 16 является лентой. В настоящем документе, термин лента означает конструкцию, которая имеет ширину больше, чем толщину, если смотреть в продольном направлении.
[0076] В первой, отведенной конфигурации, в которой дистальный конец рассекающего элемента 16 продолжается дистально из стержня 12, рассекающий элемент 16 имеет размер и форму для прохождения через стандартный роговичный разрез 4, без повреждения глаза 1. Роговичный разрез 4 обычно не превышает 3,5 мм в ширину и выполняется небольшим ножом. Поэтому, внешний диаметр стержня 12, преимущественно, не превышает 3,5 мм. Когда применяется разрез 4 с другим размером, можно использовать стержень 12 с другим внешним диаметром, учитывая, что наиболее желательно формировать разрез 4 в виде линии не более 5 мм в длину. В других вариантах осуществления, рассекающий элемент 16 располагается полностью внутри просвета 14 стержня 12 таким образом, что он находится внутри внутреннего диаметра стержня 12, когда стержень 12 вводят через разрез 4, и затем выдвигается из стержня 12 после помещения в глаз. В качестве альтернативы можно применять дополнительные компоненты для укрытия рассекающего элемента 16 во время введения через роговичный разрез 4. Устройство может включать в себя тонкостенную, отводимую втулку или оболочку, которая ограничивает перемещение рассекающего элемента 16 от продольной оси A устройства в некоторые моменты использования (т.е. во время введения, развертывания и/или перед отклонением нескольких рассекающих элементов друг относительно друга). В некоторых вариантах осуществления, на дистальном конце стержня 12 может располагаться сужающаяся деталь, которая постепенно сужается от конца стержня 12 до поперечного сечения настолько меньшего размера, что она может облегчать введение через роговичный разрез 4. Сужающаяся деталь может также укрывать рассекающий элемент 16 для сжатия его во время введения. Сужающаяся деталь может дополнительно иметь прорезь спереди, через которую может продолжать рассекающий элемент 16, или вскрываться после того, как она прошла через разрез 4.
[0077] В соответствии с некоторыми вариантами осуществления, рассекающий элемент 16 изготовлен из гибкого или сверхупругого материала, например, никель-титанового сплава, который позволяет рассекающему элементу 16 изгибаться и деформироваться, когда его вводят в глаз 1 через роговичный разрез 4. Рассекающий элемент 16 может быть также сформирован из других материалов, например, полимеров, вместо металла. В данных вариантах осуществления, сжатая форма рассекающего элемента 16 может быть больше в одном или более направлений, чем роговичный разрез 4, и деформироваться для прохождения через разрез 4, когда стержень 12 перемещается к капсулорексису 10. В качестве альтернативы, рассекающий элемент 16 может не иметь первой, отведенной конфигурации и может быть введен через разрез 4 в такой же конфигурации, которая позднее используется для зацепления хрусталика 8. В таких вариантах осуществления, рассекающий элемент 16 сжимается, когда он проходит через роговичный разрез 4 и затем снова развертывается, после того, как он проходит в глаз 1. В еще одних вариантах осуществления, рассекающий элемент 16 может не иметь первой, отведенной конфигурации и может быть введен через разрез 4 в более крупной конфигурации, чем конфигурация, впоследствии используемая для зацепления хрусталика 8. В еще одних вариантах осуществления, рассекающий элемент 16 можно перегибать, поворачивать или иначе вводить через роговичный разрез 4 многими способами.
[0078] Как видно на фиг. 4, рассекающий элемент 16 или элементы выталкивают дистально относительно просвета 14 стержня 12. Как изложено выше, один конец 20 рассекающего элемента 16 может быть зафиксирован так, что другой конец 18 рассекающего элемента 16 выталкивают дистально относительно просвета 14 стержня 12. В результате, рассекающий элемент 16 перемещается из первой, отведенной конфигурации во вторую конфигурацию захвата.
[0079] Рассекающий элемент 16 может быть изготовлен из любого подходящего материала. Например, как описано выше, можно использовать такие материалы с памятью формы, как никель-титановый сплав, чтобы обеспечить возможность перехода рассекающего элемента 16 в его предварительно заданную форму во второй развернутой конфигурации, с высокой степенью упругости. В одном варианте осуществления, никель-титановый сплав можно применять в его сверхупругом состоянии, когда никель-титановый сплав преобразует свою кристаллическую структуру для перехода из первой, отведенной конфигурации во вторую развернутую конфигурацию. В других вариантах осуществления, рассекающий элемент 16 изготовлен из никель-титанового сплава, который имеет предварительно сжатую форму для перехода из первой, отведенной конфигурации во вторую конфигурацию захвата после достижения температуры перехода, которая выше комнатной температуры, но ниже температуры тела. Таким образом, рассекающий элемент 16, изготовленный из никель-титанового сплава может входить в глаз при комнатной температуре ниже его температуры перехода, при которой он будет удерживать сжатую форму. Когда рассекающий элемент 16 помещен в глаз 1 и нагревается до температуры тела, никель-титановый сплав может нагреться выше его температуры перехода и начать возвращаться в свою предварительно заданную вторую развернутую конфигурацию. Данное изменение формы может происходить в течение некоторого периода времени, который позволяет хирургу поместить рассекающий элемент в капсульный мешок 6 и ориентировать его в то время, пока форма изменяется так, что петля может задать секущую плоскость через хрусталик. В качестве альтернативы можно рассмотреть возможности любого другого числа биосовместимых материалов, например, нержавеющей стали или неметаллических полимерных материалов. В некоторых вариантах осуществления, никель-титановый сплав может быть активно нагреваемым хирургическим устройством 40, и данном случае температуру перехода рассекающего элемента 16 можно выбирать выше комнатной температуры, но ниже температуры, которая может повредить ткань капсульного мешка 6 или другую ткань глаза 1. Вместо никель-титанового сплава можно применить другие материалы с памятью формы, пластики с памятью формы. В качестве альтернативы можно рассмотреть возможности любого другого числа биосовместимых материалов, например, нержавеющей стали, титана, силикона, полиимида, полиэфирблокамида марки PEBAX®, нейлона, поликарбоната или любого другого подходящего материала. Кроме того, можно применить несколько материалов, соединенных встык по длине или плоскопараллельными слоями, или концентрические трубки материалов.
[0080] Как также показано на фиг. 1 и 4, во второй развернутой конфигурации, рассекающий элемент 16 имеет форму, специально предназначенную для захвата хрусталика. В соответствии с некоторыми вариантами осуществления, вторая, развернутая конфигурация является предварительно заданной формой рассекающего элемента 16, например, за счет применения упругих или сверхупругих материалов для изготовления рассекающего элемента.
[0081] Как наиболее ясно видно на фиг. 4, во второй развернутой конфигурации, рассекающий элемент 16 приблизительно соответствует петле неправильной формы, которая имеет форму, в общем подобную поперечному сечению хрусталика 8, и которая выполнена по форме и размеру, чтобы охватывать хрусталик 8 внутри капсульного мешка 6. Как изложено выше, в некоторых вариантах осуществления, рассекающий элемент 16 изготовлен из отрезка проволоки круглого сечения. Вторая, развернутая конфигурация рассекающего элемента 16 имеет точка 22 схождения, в который первый конец 18 и второй конец 20 рассекающего элемента 16 сходятся обратно, образуя форму с таким периметром, что устройство 40 приблизительно соответствует замкнутой петле 21. «Схождение» означает размещение первого конца 18 и второго конца 20 рассекающего элемента 16 в непосредственной близости друг к другу. Точка 22 схождения может располагаться на дистальном конце стержня 12 или вблизи него. Во второй развернутой конфигурации, рассекающий элемент включает в себя дистальный участок 28, который продолжается дистально от точки 22 схождения, и проксимальный участок 26, который продолжается проксимально от точки 22 схождения. Точка 22 схождения в данном примерном варианте осуществления находится в точке над поверхностью хрусталика и внутри круга, ограниченного капсулорексисом 10 в верхней части капсульного мешка 6. В некоторых вариантах осуществления, проксимальный участок 26 рассекающего элемента 16 может включать в себя изгиб 24 малого радиуса, как показано на фиг. 1. Изгиб 24 малого радиуса изгибает второй конец 20 рассекающего элемента 16 в проксимальном направлении так, что второй конец 20 продолжается проксимально от точки 22 схождения. В качестве альтернативы, рассекающий элемент 16 может проходить по другой траектории, чтобы обеспечивать переход на данную траекторию без такого малого радиуса кривизны. Например, траектории, которые находятся снаружи вне нормальной плоскости на фиг. 1, например, можно применить кривые или осциллирующие линии, чтобы уменьшить общий радиус изгиба проксимального участка 26 рассекающего элемента 16. Это может улучшить способность рассекающего элемента 16 изменять форму до других сжатых конфигураций меньшего размера, как описано ниже.
[0082] Первый конец 18 и/или второй конец 20 выталкивается из просвета 14 стержня 12 в то время, как другой конец зафиксирован относительно стержня 12, как описано выше. В качестве альтернативы, оба конца 18, 20 рассекающего элемента 16 являются передвигаемыми относительно стержня 12 и выполнены с возможностью сдвига относительно просвета 14 стержня 12. В качестве альтернативы, стержень 12 может быть сдвигающимся компонентом, а рассекающий элемент 16 остается неподвижным. Когда конец или концы 18, 20 (иногда называемые «ножками») выталкиваются наружу из просвета 14, рассекающий элемент 16 переходит во вторую развернутую конфигурацию. Когда рассекающий элемент 16 совершает переход, изгиб 24 малого радиуса позволяет проксимальной секции рассекающего элемента выдвигаться проксимально из дистального конца стержня 12 в местоположение, отстоящее от и в одну боковую сторону (т.е. смещаться) от продольной центральной линии просвета 12, в направлении к капсульному мешку 6. Таким образом, рассекающий элемент 16 способен выдвигаться вниз к капсулорексису 10 и растягиваться в длину внутри капсульного мешка 6, который больше диаметра капсулорексиса 10, как видно на фиг. 1. В соответствии с некоторыми вариантами осуществления, изгиб 24 малого радиуса приводит к тому, что второй конец 20 составляет угол, по меньшей мере, 120 градусов относительно продольной центральной линии стержня 12 и относительно дистального направления, как видно на фиг. 1. Как дистальный участок 28, так и проксимальный участок 26 рассекающего элемента 16 во второй развернутой конфигурации являются немного искривленными и, в общем, приближаются к размеру и форме боковых сторон капсульного мешка 6, чтобы входит в капсульный мешок 6 без причинения повреждения (например, разрыва или прокалывания капсульного мешка, чрезмерного растяжения капсульного мешка или повреждения внутренней поверхности ткани капсульного мешка).
[0083] Как также показано на фиг. 2, форма рассекающего элемента 16 во второй развернутой конфигурации образует плоскость, которая является, в общем, плоской или горизонтальной относительно верхней поверхности хрусталика, в соответствии с некоторыми вариантами осуществления. Как еще показано на фиг. 1 и 3, при правильной ориентации, рассекающий элемент 16 удерживается так, что он раскрывается через капсулорексис 10 в капсульный мешок 6. Когда рассекающий элемент 16 продолжает развертываться, плоскость, образуемую рассекающим элементом 16, можно поворачивать, чтобы рассекающий элемент проходил по промежутку между капсульным мешком и хрусталиком. Плоскость включает в себя продольную ось просвета 14 стержня 12. В качестве альтернативы, форма рассекающего элемента 16 во второй развернутой конфигурации является к тому же трехмерной формой, которая не лежит в одной плоскости. Например, рассекающий элемент 16 может попеременно укладываться в плоскость и выходить из нее или может значительно выгибаться из плоскости в одном или другом направлении. Поворот можно обеспечивать поворотом от руки стержня 12 хирургического устройства 40 пользователем или можно быть обеспечивать механизмами, встроенными в хирургическое устройство 40, как подробнее описано ниже. Как также показано на фиг. 4, рассекающий элемент 16 проследовал большую часть пути из первой, отведенной конфигурации во вторую развернутую конфигурацию и частично повернут относительно хрусталика 8. Рассекающий элемент 16 можно повернуть так, чтобы плоскость формы располагалась, в основном, вертикально или под любыми другими многочисленными углами. Механизмы и способы для выполнения такого поворота описаны ниже подробнее. Кроме того, можно применить несколько рассекающих элементов 16, которые поворачиваются под множеством разных углом. В других вариантах осуществления, поворот не происходит, пока рассекающий элемент 16 не переходит во вторую развернутую конфигурацию. В соответствии с некоторыми вариантами осуществления, поворот начинается в то время, когда рассекающий элемент 16 переходит во вторую развернутую конфигурацию. Например, поворот может начинаться после того, как раскрытая область 46 петли и внутри рассекающего элемента 16 развертывается до размера, при котором через раскрытую область 46 между двумя точками на проксимальном участке 26 и дистальном участке 28 простирается 5-6-мм хорда. В другом примере, поворот может начинаться, когда хорда длиннее или короче, чем 5-6 мм.
[0084] Вторая, развернутая конфигурация рассекающего элемента 16 может иметь, в общем, овулярную форму, как показано на фиг. 1, с шириной 7,0-15 мм и высотой 3,0-10 мм, в соответствии с некоторыми вариантами осуществления. В соответствии с другими вариантами осуществления, ширина рассекающего элемента 16 может быть 4,0-20 мм, при высоте 1,0-15 мм. В некоторых вариантах осуществления размер второй развернутой конфигурации рассекающего элемента 16 может быть намеренно меньше размера хрусталика в некоторых местах или по всему профилю. Это может улучшить способность рассекающего элемента 16 оставаться вплотную к хрусталику 8 и уменьшать взаимодействие с капсульным мешком 6. Например, вторая, развернутая конфигурация рассекающего элемента 16 может иметь ширину 12 и и высоту 4,0 мм. Это может допускать просвет между рассекающим элементом 16 и хрусталиком 8 по ширине овала, при сохранении контакта вдоль высоты овала, что может снижать вероятность повреждения задней поверхности капсульного мешка 6. То есть, посредством придания второй развернутой конфигурации рассекающего элемента 16 такой формы, чтобы зацеплять участок хрусталика 8, вместо того, чтобы перемещаться в положение, в котором он охватывает самую толстую часть хрусталика 8, рассекающий элемент 16 доводится до меньшего размера и зацепляет меньшую часть капсульного мешка 6, чем в конфигурации, в которой вторая, развернутая конфигурация рассекающего элемента 16 способна охватить самую толстую часть хрусталика 8. В других вариантах осуществления, вторая, развернутая конфигурация рассекающего элемента 16 является предварительно заданной, чтобы иметь, в общем, конкретный просвет вокруг хрусталика 8. В соответствии с некоторыми вариантами осуществления, вторая, развернутая конфигурация рассекающего элемента 16 имеет иную форму, чем, в общем, овал.
[0085] Рассекающий элемент 16 может иметь особенности или геометрию, которая дополнительно предотвращает повреждение капсульного мешка элементом. Например, рассекающий элемент 16 является круглой проволокой достаточного диаметра, чтобы снизить вероятность разрыва или повреждения капсульного мешка 6, в соответствии с некоторыми вариантами осуществления. Диаметр такой круглой проволоки может составлять 0,004-0,012 дюймов (0,1-0,3 мм), но может быть также любым другим, который предотвращает избыточное напряжение при размещении в капсульном мешке 6, например, диаметр 0,001-0,030 дюймов (0,25-076 мм). В качестве альтернативы, профиль рассекающего элемента 16 может быть овулярным с большей шириной или высотой или может быть лентой, чтобы дополнительно распределять усилие, прилагаемое рассекающим элементом 16 к капсульному мешку 6, по большей площади поверхности, что уменьшает или исключает зоны высокого давления, прилагаемого рассекающим элементом к капсульному мешку 6.
[0086] В некоторых вариантах осуществления, на участки внешней поверхности рассекающего элемента 16 может быть нанесено покрытие, чтобы улучшить некоторые аспекты устройства. Например, как подробнее описано ниже, рассекающий элемент 16 пересекает промежуток между капсульным мешком 6 и хрусталиком 8. Когда рассекающий элемент 16 перемещается между данными анатомическими структурами, возможно, полезно было бы иметь более гидрофильную или гидрофобную поверхность, чтобы рассекающий элемент 16 поворачивался и перемещался свободнее. В одном варианте осуществления, рассекающий элемент 16 может быть покрыт гидрофобным материалом, например, фторполимером; таким как политетрафторэтилен (PTFE). Покрытие может быть нанесено окунанием, по технологии осаждения из газовой фазы под воздействием плазмы, с помощью термоусадочных оболочек или любым другим подходящим способом. Покрытие может ослаблять трение между рассекающим элементом 16 и хрусталик 8 и/или капсульным мешком 6, чтобы допускать более свободное перемещение рассекающего элемента 16. Другие способы ослабления трения могут включать в себя использование механической шлифовки абразивом, плазменную обработку или любой другой подходящий способ. В качестве альтернативы, рассекающий элемент 16 может быть покрыт другими материалами, например, активными фармацевтическими средствами, которые предназначены для высвобождения в глаз во время процедуры. Например, на поверхность рассекающего элемента 16 можно нанести стероид типа триамцинолона, чтобы, во время процедуры он высвобождался в глаз. Можно рассмотреть возможность применения любого другого числа покрытий и лекарств.
[0087] Рассекающий элемент 16 можно изготавливать с использованием любых других подходящих геометрий или материалов. В примерном варианте осуществления, рассекающий элемент 16 является круглой проволокой. Проволока выполнена с возможностью прохода, так называемым, тупым путем по промежутку между хрусталиком 8 и капсульным мешком 6. Проволока может иметь различные размеры или диаметры вдоль длины рассекающего элемента 16. В качестве альтернативы, рассекающий элемент 16 может иметь множество любых других профилей. Например, рассекающий элемент 16 может быть трубкой, узкой полосой, лентой, проволокой с шестигранным профилем или иметь многие другие подходящие формы. Кроме того, профиль рассекающего элемента 16 может изменяться по его длине. Например, рассекающий элемент 16 может включать в себя одну или более мягких зон вдоль его профиля, в которых повреждение капсульного мешка 4 вызывает особое беспокойство. Мягкие зоны могут включать в себя разные материалы, например, но без ограничения, мягкие эластомерные материалы типа силикона, которые приклеены или нанесены в виде покрытия на соответствующие зоны рассекающего элемента 16. Мягкие зоны могут распределять усилие по большей площади и обеспечивать смягченное и более атравматичное соприкосновение с капсульным мешком 6. В других вариантах осуществления, мягкие зоны представляют собой изменения геометрического профиля рассекающего элемента в некоторых зонах. Например, зоны, которые спрямлены или расширены, даже если состоят из одинакового материала, распределяют усилие по большей площади. Кроме того, жесткость или гибкость рассекающего элемента можно изменять вдоль рассекающего элемента 16 посредством изменения толщины материала или диаметра проволоки в некоторых зонах. В качестве альтернативы, рассекающий элемент 16 можно дополнить втулками или другими материалами, чтобы локально повысить жесткость в некоторых зонах. В еще одних вариантах осуществления, рассекающий элемент 16 может иметь вырезы или ребрами вдоль его длины, которые изменяют его гибкость или жестких в некоторых зонах.
[0088] В других вариантах осуществления, форма рассекающего элемента 16 во второй развернутой конфигурации не задана предварительно. Вместо этого, форма рассекающего элемента 16 во второй развернутой конфигурации определяется материалом или геометрическими свойствами рассекающего элемента 16, введенного в зацепление с хрусталиком 8. Рассекающий элемент 16 может быть достаточно гибким, упругим, мягким или округленным по его длине и одновременно сохранять достаточную жесткость, чтобы допускать поворот для зацепления хрусталика 8, так что на капсульный мешок 6 действует минимальное усилие, даже когда рассекающий элемент 16 находится внутри капсульного мешка 4 и полностью раскрыт. В других вариантах осуществления, рассекающий элемент 16 может быть мягким эластомером, например, силиконом, который может быть достаточно мягким и иметь достаточно большой диаметр, чтобы рассекающий элемент 16 не воздействовал чрезмерным усилием на капсульный мешок 6. В еще одних вариантах осуществления, рассекающий элемент 16 может быть достаточно скругленным вдоль некоторых участков и кромок, чтобы усилие, прилагаемое к капсульному мешку 6, распределялось по большей площади, и потому разрывающее давление можно снизить. В еще одних вариантах осуществления, рассекающий элемент 16 может состоять из соединения нескольких элементов, например, в цепочечную конструкцию, что допускает гибкое перемещение между несколькими элементами. В еще одних вариантах осуществления, рассекающий элемент 16 может иметь прорези вдоль участков его длины, которые могут локально повышать его гибкость. Например, рассекающий элемент 16 может включать в себя трубку с вырезами вдоль его длины в зонах, в которых капсульный мешок 6 может приходить в контакт с рассекающим элементом 16, чтобы упомянутые зоны были более гибкими и потому менее склонными к воздействию чрезмерным усилием на капсульный мешок 6. В еще одних вариантах осуществления, участки рассекающего элемента 16 во второй развернутой конфигурации не имеют предварительно заданной формы, а другие участки рассекающего элемента 16 имеют предварительно заданную форму. Например, участок рассекающего элемента 16 спереди хрусталика может быть изготовлен из круглой проволоки с памятью формы и имеет форму, сжатую до предварительно заданной формы, которая способствует проведению рассекающего элемента 16 в глаз. Например, такой участок может включать в себя изгиб 24 малого радиуса проксимального участка 26. Участок рассекающего элемента 16 позади хрусталика 8 может быть изготовлен из отличающегося, более гибкого материала, который легче согласуется с формой глаза. Таким образом, участок рассекающего элемента 16 во второй развернутой конфигурации, который допускает введение рассекающего элемента через капсулорексис и включает в себя изгиб малого радиуса, находится спереди хрусталика 8, и участок рассекающего элемента 16 во второй развернутой конфигурации, который контактирует с капсульным мешком 6, состоит из более гибкого материала, еще менее способного повредить капсульный мешок 6.
[0089] В соответствии с некоторыми вариантами осуществления, дополнительные направляющие трубки или компоненты могут выравнивать или направлять траекторию рассекающего элемента 16 через капсулорексис 10 и/или вокруг хрусталика 8. Например, в вариантах осуществления, в которых рассекающий элемент 16 во второй развернутой конфигурации не имеет предварительно заданной формы, вдоль зон дистального участка 28 или проксимального участка 26 рассекающего элемента 16 может присутствовать направляющий элемент, чтобы ограничивать его до конкретной формы. Трубка может продолжаться от точки 22 схождения в направлении к дистальному участку 28, и трубка может концентрично ограничивать гибкий рассекающий элемент 16 таким образом, чтобы он более или менее следовал искомой траектории во время введения в капсульный мешок 6 и размещения вокруг хрусталика 8. Затем направляющую трубку можно отводить, оставляя гибкий рассекающий элемент 16 на месте вокруг хрусталика 8.
[0090] В еще одних вариантах осуществления, предварительно заданная форма рассекающего элемента 16 во второй развернутой конфигурации может быть создана в течение любой части хирургической процедуры. Например, хирург может использовать методы визуализации для измерения анатомических особенностей глаза, например, хрусталика 8 или капсульного мешка 6. В таком случае, хирург может использовать данную информацию, чтобы образовать или изменять форму рассекающего элемента 16. В качестве альтернативы, для изменения формы рассекающего элемента 16 во второй развернутой конфигурации можно использовать такое оборудование, как формообразующий штамп или автоматическую машину для фасонной гибки проволоки, в сочетании с измеренными данными. В одном варианте осуществления, хирург использует средство визуализации, например, оптический компьютерный томограф (OCT), для выполнения измерения хрусталика 8, и затем данная информация подается в автоматическую установку для фасонной гибки проволоки, которая образует индивидуальный рассекающий элемент 16 для пациента. В еще одних вариантах осуществления, хирург может дополнять или изменять форму рассекающего элемента 16 в то время, когда, по меньшей мере, участок рассекающего элемента 16 находится внутри глаза. Например, хирург может начать размещение рассекающего элемента 16 в капсульном мешке 6 и определить, что его форму можно улучшить. Затем хирург может ввести отдельный инструмент, например, щипцы, в глаз или использовать встроенный инструмент, связанный со стержнем 12, чтобы дополнить или изменить форму рассекающего элемента 16.
[0091] В соответствии с некоторыми вариантами осуществления, между капсульным мешком 6 и хрусталиком 8 вводится текучая среда после того, как сделан капсулорексис 10, так что между хрусталиком 8 и капсульным мешком 6 создается промежуток в, по меньшей мере, некоторых зонах. Это можно назвать разделением текучей средой или созданием промежутка. В соответствии с некоторыми вариантами осуществления, текучая среда создает промежуток для того, чтобы поворачивать рассекающий элемент 16 во второй развернутой конфигурации внутри капсульного мешка 6 и вокруг хрусталика 8. В примерном варианте осуществления можно вводить такие текучие среды, как вязкоупругая гиалуроновая кислота или физиологический раствор, поскольку данные материалы широко применяются во время хирургической операции глаз, являются хорошо переносимыми внутри глаза и легко доступными. Возможно введение одной или более других или дополнительных текучих сред, например, окрашенных текучих сред, фармацевтических жидкостей стероидного типа, текучих сред с лекарствами, биологически поглощаемых текучих сред, смазывающих веществ, гидрогелей, микросфер, порошковых веществ, флюоресцентных контрастных веществ, жидких пен или любых других подходящих текучих сред. Кроме того, дополнительно или взамен можно вводить один или более газов, например, воздух, кислород, аргон, озон или подобные газы. В качестве альтернативы, в других вариантах осуществления, между хрусталиком 8 и капсульным мешком 6 может не и требоваться промежуток с текучей средой, и рассекающий элемент 16 может выполнять механическое разделение или тупое разделение хрусталика 8 и капсульного мешка 6, когда элемент поворачивается вокруг хрусталика 8. Разделение текучей средой и тупое разделение могут выполняться в комбинации друг с другом или по отдельности. Текучую среду можно вводить посредством канюли или иглы в капсульный мешок 6, с использованием отдельного инструмента. В соответствии с другими вариантами осуществления, в элементы хирургического устройства 40, например, рассекающий элемент 16, могут быть встроены средства для разделения текучей средой. Например, рассекающий элемент 16 может быть изготовлен в виде гибкой трубки с множеством отверстий по его длине, которые допускают протекание сквозь них текучей среды. В таком варианте осуществления, текучая среда может подаваться в просвет рассекающего элемента 16 и затем вытекать из множества отверстий. Это может улучшить способность рассекающего элемента 16 проходить между капсульным мешком 6 и хрусталиком 8 потому, что текучую среду можно вводить через рассекающий элемент 16 непрерывно или в отдельные моменты времени, когда требуется разделение. В еще одних вариантах осуществления, введение текучей среды можно включать в другие аспекты хирургического устройства 40. Например, текучую среду можно подавать по просвету 14 стержня 12. В качестве альтернативы, к стержню 12 может быть присоединен компонент, отдельный от стержня 12, например, телескопическая трубка или другая трубка, чтобы обеспечить введение текучей среды. В некоторых вариантах осуществления, текучую среду, которую подают через посредство компонента устройства, например, стержня 12 или рассекающего элемента 16, можно использовать для других хирургических целей. Например, текучую среду можно вливать через стержень 12, чтобы поддерживать камеру глаза 1, без потребности в отдельной канюле или без потребности в вязкоупругом веществе. Ирригацию и аспирацию можно обеспечить посредством одного компонента или посредством нескольких отдельных компонентов. Например, такие текучие среды, как физиологический раствор можно вливать в глаз через просвет вышеописанного варианта осуществления рассекающего элемента 16 и всасывать через просвет стержня 12. В соответствии с некоторыми вариантами осуществления можно выполнять другие методы ирригации или аспирации.
[0092] На фиг. 5, рассекающий элемент 16 показан уже полностью выдвинутым во вторую развернутую конфигурацию и повернутым вокруг продольной оси стержня 12 и/или иначе повернутым или перемещенным в некоторую ориентацию внутри капсульного мешка 6, в которой рассекающий элемент 16 охватывает хрусталик 8, без воздействия избыточным усилием на капсульный мешок 6. После этого, рассекающий элемент 16 используют для разрезания хрусталика 8 посредством натяжения одного или обоих концов 18, 20 рассекающего элемента 16, например, посредством вытягивания одного или обоих концов 18, 20 через просвет 14 стержня 12. Рассекающий элемент 16 можно переместить иным образом, противоположном вышеописанному, для развертывания рассекающего элемента 16 из первой во вторую конфигурацию, чтобы сжать и разрезать хрусталик 8. Когда рассекающий элемент 16 натягивают, он воздействует направленным внутрь усилием на хрусталик 8 и начинает его разрезание и/или фрагментацию благодаря усилию, прилагаемому к хрусталику 8 по небольшой площади поверхности рассекающего элемента 16 малого диаметра. Рассекающий элемент 16 продолжают натягивать, пока хрусталик 8 не рассекается частично или полностью. В некоторых вариантах осуществления рассекающий элемент 16 натягивают, пока хрусталик 8 не рассекается полностью. В других вариантах осуществления, натяжение рассекающего элемента 16 только частично фрагментирует хрусталик 8, и остаток хрусталика 8 можно фрагментировать повторным использованием рассекающего элемента или дополнительными инструментами. На фиг. 6 показан фрагментированный хрусталик 8 внутри капсульного мешка 6. Плоскость рассечения является, в основном, вертикальной, но следует понимать, что существует множество возможных любых углов и ориентаций для траектории рассекающего элемента 16. На фиг. 7 показан хрусталик без капсульного мешка.
[0093] В некоторых вариантах осуществления, хирургическое устройство 40 может включать в себя несколько рассекающих элементов 16, как описано ниже, чтобы создавать несколько фрагментов хрусталика за один раз. Например, несколько рассекающих элементов 16 могут формировать сетку, которая способна разрезать хрусталик 8 на большое число фрагментов; при этом рассекающие элементы 16 могут находиться под косыми или острыми углами друг относительно друга таким образом, что они формируют перекрестную картину расположения. В других вариантах осуществления, хирургическое устройство 40 можно использовать на хрусталике 8 последовательно. Например, после создания одного рассечения, хрусталик 8 (или рассекающий элемент 16) можно повернуть на 90 градусов, чтобы, после этого, плоскость первого рассечения стала перпендикулярной плоскости доставки устройства. Затем рассекающий элемент 16 можно повторно ввести в капсульный мешок 6, как описано выше, и использовать для создания нового рассечения через два фрагмента хрусталика, в результате чего образуются в сумме четыре фрагмента. Процесс можно повторять столько раз, сколько необходимо для образования любого числа фрагментов хрусталика с любым требуемым размером. Окончательный требуемый размер фрагментов хрусталика может зависеть от способа извлечения из глаза 1. В некоторых вариантах осуществления, в капсульном мешке 6 можно дополнительно использовать факоэмульсификацию для удаления фрагментов хрусталика. Это может быть особенно полезно при тяжелых или ядерных формах катаракт, когда полная фрагментация хрусталика увеличивает площадь поверхности и уменьшает размер фрагментов, которые следует эмульгировать методом факоэмульсификации. В других вариантах осуществления, фрагменты хрусталика можно извлекать, как описано ниже.
[0094] В некоторых вариантах осуществления, фрагменты хрусталика можно выталкивать из капсульного мешка 6 посредством подачи текучей среды в капсульный мешок 6 под небольшим давлением. Поток и/или давление текучей среды могут перемещать фрагменты хрусталика в переднюю камеру глаза 1, чтобы можно было использовать другие инструменты и способы для извлечения хрусталика. Например, можно использовать пинцет или захватывающий инструмент, чтобы захватывать фрагменты хрусталика и вытягивать их из глаза 1 через роговичный разрез 4. В некоторых вариантах осуществления, для улавливания фрагментов хрусталика и вытягивания их из глаза 1 можно использовать рассекающий элемент 16. Рассекающий элемент 16 можно вернуть во вторую развернутую конфигурацию и разместить вокруг фрагмента хрусталика. Затем рассекающий элемент 16 можно натягивать или иначе смыкать, пока хрусталик 8 не закрепится внутри рассекающего элемента, но фрагмент хрусталика не разрезается. Затем фрагмент хрусталика можно вытянуть рассекающим элементом 16 из глаза 1. Для обеспечения того, чтобы хрусталик 8 не разрезался рассекающим элементом 16, можно использовать дополнительные компоненты, например, подкладки, ленты или полоски с большей площадью поверхности, которые схватывают, но не разрезают фрагмент хрусталика. Данные компоненты могут продолжаться из стержня 12 или могут быть отдельными компонентами, которые вводят в глаз 1 через разрез 4 и присоединяют к рассекающему элементу 16.
[0095] Как показано на фиг. 8-9, один вариант осуществления хирургического устройства 40 включает в себя два рассекающих элемента 16, продолжающихся из дистального конца стержня 12, с рукояточным механизмом 42, прикрепленным к проксимальному концу стержня 12. На фиг. 15 также показаны два рассекающих элемента 16, находящихся в первой, отведенной конфигурации на дистальном конце стержня 12. Рукоятка 42 содержит два продольно передвигаемых движка 44a, 44b, которые соединены с двумя рассекающими элементами 16, как описано ниже. Движки 44a, 44b в данной исходной конфигурации находятся в их отведенном проксимальном положении. Стержень 12 и рассекающие элементы 16 в первой, отведенной конфигурации вводят через разрез 4 в роговице 2 к капсулорексису 10, как описано выше. В настоящем документе, термин «рукоятка» включает в себя как рукоятки, предназначенные для ручного захвата и приведения в действие хирургом, так и роботизированную рукоятку, которая соединена с хирургическим роботом и предназначена для роботизированного управления и приведения в действие.
[0096] На фиг. 16-17 представлен также один вариант осуществления рукоятки 42 хирургического устройства 40, показанный на виде в разрезе в конфигурации, соответствующей первой, отведенной конфигурации рассекающих элементов 16. Движок 44 может передвигаться вдоль верхней поверхности рукоятки 42. Палец 48 продолжается из движка 44 в рукоятку 42 через паз в верхней поверхности рукоятки 42. Палец 48 соединен со спиральным кулачком 50 или другой кулачковой конструкцией, расположенной проксимально от пальца 48, который(ая) продольно (т.е. без возможности продольного перемещения) зафиксирован(а) к пальцу 48, но может свободно поворачиваться вокруг собственной оси относительно пальца 48. Это можно обеспечить механически, посредством сцепляющего штифта, втулки или другого подходящего механизма. В поверхности спирального кулачка 50 задана криволинейная канавка 52 кулачка. Спиральный кулачок 50 заключен в камере внутри рукоятки 42, которая позволяет спиральному кулачку 50 сдвигаться продольно, но, по существу, не дает перемещаться радиально. Передняя часть 56 продолжается дистально от пальца 48 и может поворачиваться относительно пальца 48. Передняя часть 56, предпочтительно, поворотно (т.е. без возможности поворота) зафиксирована к спиральному кулачку 50. В некоторых вариантах осуществления, передняя часть 56 является просто дистальным концом спирального кулачка 50. Между пальцем 48 и передним проходом 60 из рукоятки 42 располагается возвратная пружина 58, работающая на отталкивание пальца 48 в направлении к первой, отведенной конфигурации. Проксимальный конец возвратной пружины 58 может быть отцентрированным по передней части 56 и зацеплять ее. Проксимальный конец первого конца 18 рассекающего элемента 16 может быть зафиксирован к передней части 56 любым подходящим образом, например, накручиванием на переднюю часть, по фрикционной посадке, сваркой, пайкой или по посадке с натягом. В качестве альтернативы, проксимальный конец первого конца 18 может быть зафиксирован к пальцу 48. Кулачковый штырек 62 образован в рукоятке 42 и/или зафиксирован относительно нее, и находится в зацеплении с криволинейной канавкой 52 кулачка. Когда спиральный кулачок 50 перемещается относительно остальной части рукоятки 42, при этом кулачковый штырек 62 остается там же на рукоятке 42. В случае, когда применены два рассекающих элемента 16, два таких узла, которые описаны выше (движок 44, палец 48, кулачок 50, передняя часть 56, возвратная пружина 58 и соединение с первым концом 18 рассекающего элемента 16) используются в параллельном расположении внутри рукоятки 42. Такие узлы могут быть идентичны между собой, могут быть боковыми зеркальными изображениями друг друга или могут отличаться один от другого другими способами, которые позволяют, по существу, одному и тому же узлу управлять двумя отдельными рассекающими элементами 16 нижеописанным образом. Описание движения движков 44a, 44b и рассекающих элементов 16 является одинаковым для обоих движков 44 и рассекающих элементов 16, если не указано иначе, и описания обоих равнозначны, если не указано иначе.
[0097] На фиг. 10 показано, что один из рассекающих элементов 16 переведен во вторую развернутую конфигурацию сдвиганием соответствующего движка 44b в дистальном направлении. Один конец 20 рассекающего элемента 16 может быть присоединен к стержню 12, рукоятке 42 или другой конструкции, зафиксированной относительно рукоятки 42, и сохраняется в зафиксированном положении в то время, как первый конец 18 выполнен с возможностью поступательного перемещения и поворота, при перемещении элементов внутри рукоятки 42. Как изложено выше, первый конец 18 прикреплен к передней части 56. Как показано также на фиг. 18, когда движок 44 перемещается дистально, палец 48 сжимает возвратную пружину 58, дистально перемещает переднюю часть 56 и дистально толкает спиральный кулачок 50. Возвратная пружина 58 сжимается и передает проксимальное усилие на палец 48. Если пользователь отпускает движок 44, то движок 44, палец 48 и механизмы, поступательно (т.е. без возможности поступательного перемещения) зафиксированные к пальцу 48, выталкиваются дистально в сторону исходного положения движка 44. Когда движок 44 выдвигается дистально, спиральный кулачок 50 поступательно перемещается внутри рукоятки 42. Криволинейная канавка 52 кулачка может быть, по существу, продольной в течение данного первого сегмента движения движка 44, так что зацепление между криволинейной канавкой 52 кулачка и кулачковым штырьком 62 не вызывает поворота спирального кулачка 50. Следовательно, рассекающий элемент 16 остается, по существу, в одной и той же поворотной ориентации относительно продольной оси стержня 12. Когда движок 44 выдвигается дистально, он дистально выталкивает первый конец 18 рассекающего элемента 16. В результате, рассекающий элемент 16 изменяет форму до второй развернутой конфигурации таким же образом, как описано выше в отношении фиг. 1-4.
[0098] Как показано также на фиг. 11, движок 44 можно дополнительно выдвигать дистально после того, как рассекающий элемент 16 изменит форму до второй развернутой конфигурации. Криволинейная канавка 52 кулачка оказывается в таком зацеплении с кулачковым штырьком 62, чтобы поворачивать спиральный кулачок 50, как видно на фиг. 18-20. Величина дистального перемещения движка 44 управляет величиной поворота спирального кулачка 50. Таким образом, линейное перемещение движка 44 преобразуется в поворотное движение рассекающего элемента 16. Поскольку спиральный кулачок 50 и передняя часть 56 поворотно зафиксированы друг к другу, то поворот спирального кулачка 50 вызывает поворот передней части 56 и, следовательно, поворот рассекающего элемента 16 во второй развернутой конфигурации. Рассекающий элемент 16 поворачивается, и соответственно поворачивается плоскость, заданная формой рассекающего элемента 16. Рассекающий элемент 16 поворачивается из его исходного положения, которое может быть, по существу, параллельным плоскости, заданной кромками капсулорексиса 10, в положение, которое находится, приблизительно, под углом 0-40 градусов от вертикальной ориентации. В течение этого поворота, рассекающий элемент 16 перемещается между капсульным мешком 6 и хрусталиком 8, захватывая хрусталик 8 в раскрытой области 46 внутри периметра рассекающего элемента 16. Рассекающий элемент 16 может, по существу, и не зацеплять капсульный мешок 6 и/или хрусталик 8 или может быть выполнен с возможностью зацепления либо хрусталика 8, либо с капсульным мешком 6. В качестве альтернативы, рассекающий элемент 16 может вызывать тупое разделение между капсульным мешком 6 и хрусталиком 8.
[0099] На фиг. 20 показано также, что движок 44 полностью перемещен вперед, и поворот спирального кулачка 50 и рассекающего элемента 16 завершен. Рассекающий элемент 16 охватывает хрусталик 8 внутри капсульного мешка 6 и имеет конфигурацию для приложения режущего усилия, направленного внутрь относительно хрусталика 8, таким образом, как описано выше в отношении фиг. 4-5.
[0100] Как показано также на фиг. 12-13, второй рассекающий элемент 16 можно после этого развертывать во вторую развернутую конфигурацию и поворачивать в положение для охвата хрусталика 8, таким же образом, как описано выше в отношении фиг. 9-11 и 16-20. Как показано также на фиг. 14, оба рассекающих элемента 16 зацепляют хрусталик 8, так что, когда рассекающие элементы 16 будут натягиваться или иначе смыкаться, рассекающие элементы 16 разрежут хрусталик 8 на три частично или полностью отдельных фрагмента. Как показано также на фиг. 21, натяжение может обеспечиваться проксимальным сдвигом движков 44, с вытягиванием, тем самым, первого конца 18 каждого рассекающего элемента 16 в проксимальном направлении и его натяжением. В некоторых вариантах осуществления, проксимальное усилие, прилагаемое к пальцу 48 возвратной пружиной 58, может быть достаточно большим, чтобы разрезать хрусталик 8 без приложения дополнительного усилия пользователем. В других вариантах осуществления, пользователь обеспечивает дополнительное усилие, которое фрагментирует хрусталик 8. Это может быть необходимо, в частности, при ядерной или тяжелой форме катаракт. Каждый рассекающий элемент 16 зацепляет заднюю поверхность хрусталика 8 вдоль линии, отстоящей от другого рассекающего элемента 16, и зацепляет переднюю поверхность хрусталика 8 вдоль, по существу, такой же линии, в соответствии с некоторыми вариантами осуществления.
[0101] На фиг. 22, движок 44 перемещается проксимально для возврата в исходное положение. Рассекающий элемент 16 поворачивается обратно в его исходную плоскость введения и затем отводится к стержню 12. Как показано также на фиг. 15, рассекающие элементы 16 могут вернуться, по существу, в их исходную конфигурацию после рассечения хрусталика. Криволинейная канавка 52 кулачка спирального кулачка 50 может быть замкнутой петлей, как показано. В качестве альтернативы, криволинейная канавка 52 кулачка может иметь однонаправленную траекторию, при этом движок 44 следует поступательно перемещать полностью дистально и затем проксимально для его перемещения в исходное положение. В некоторых вариантах осуществления, в криволинейную канавку 52 кулачка могут быть встроены однонаправленные защелки или рычаги, которые блокируют поворот или перемещение спирального кулачок 50 в некоторых направлениях, и которые могут содержаться в отдельных положениях криволинейной канавки 52 кулачка или вдоль всей криволинейной канавки 52 кулачка.
[0102] В соответствии с некоторыми вариантами осуществления, рассекающие элементы 16 могут быть выполнены с возможностью синхронного перемещения, при приведении в действие единственного движка 44, вместо соединения каждого рассекающего элемента 16 с другим движком 44a, 44b, как описано выше. В таком случае, рассекающие элементы 16 могут быть выполнены с возможностью одновременного развертывания, раскрытия и/или поворота. В качестве альтернативы, поворот рассекающих элементов 16 может выполняться со сдвигом во времени таким образом, что один рассекающий элемент 16 раскрывается первым и поворачивается первым, раньше другого рассекающего элемента 16. Это можно обеспечить созданием связи отличающихся криволинейной канавки 52 кулачка и кулачкового штырька 62 с каждым рассекающим элементом 16. В еще одних вариантах осуществления, два движка 44a, 44b могут быть выполнены так, что левый движок 44b будет перемещать вперед оба движка 44, а правый движок 44a будет перемещать вперед только правый движок 44a (или наоборот). Правый движок 44a может быть выполнен с возможностью перемещения назад обоих движков 44a, 44b, и левый движок может перемещать назад только левый движок 44b. Таким образом, пользователь может решать, перемещать ли движки 44a, 44b независимо или синхронно.
[0103] В соответствии с некоторыми элементами, рассекающие элементы 16 поворачиваются в одном направлении. Например, первый рассекающий элемент 16 раскрывается и затем поворачивается в капсульный мешок 6 в направлении по часовой стрелке. Затем раскрывается второй рассекающий элемент и также поворачивается в капсульный мешок 6 в направлении по часовой стрелке. В данном варианте осуществления, первый рассекающий элемент 16 может повернуться до угла, на 10-40 градусов заходящего за вертикальную плоскость, и второй рассекающий элемент 16 может повернуться до угла, на 10-40 градусов не доходящего до вертикальной плоскости.
[0104] В еще одних вариантах осуществления можно использовать один или более дополнительных или отличающихся механизмов для развертывания рассекающих элементов 16. Например, для развертывания одного или обоих рассекающих элементов 16 можно применить механизм подачи колесом прокрутки или другой поворотный механизм. В некоторых вариантах осуществления, перемещению, совершаемому пользователем, соответствует перемещение рассекающего элемента 16 с большей или меньшей скоростью, так что заданная величина перемещения компонентов сопряжения с пользователем перемещает рассекающий элемент 16 на большую или меньшую величину вследствие применения зубчатых передач разномасштабных шкивов или любого другого числа компонентов. В некоторых вариантах осуществления, некоторые части хирургического устройства 40 могут иметь механический привод от таких компонентов, как электродвигатели, линейные индукторные двигатели, пневматические устройства, гидравлические устройства, магниты или что-то подобное. Хирургическое устройство 40 может быть включенным в состав одного или более роботизированных узлов большего размера. Например, роботизированное устройство, которое спроектировано с возможностью выполнения катарактальной процедуры, может включать в себя вариант осуществления хирургического устройства 40. Это может позволить хирургам выполнять части описанного способа с помощью робота. В некоторых вариантах осуществления это может предусматривать возможность альтернативных методов и способов, например, осуществление подхода к капсульному мешку 4 через склеру. В соответствии с некоторыми вариантами осуществления, по меньшей мере, введение стержня 12, имеющего сквозной просвет 14, через роговичный разрез 4 по направлению к капсулорексису 10 и выдвижение рассекающего элемента 16 из дистального конца просвета 14, чтобы, в результате, рассекающий элемент 16 отогнулся от оси стержня 12 через капсулорексис 10 развернулся до размера, превышающего размер капсулорексиса 10, и захватил, по меньшей мере, часть хрусталика 8, выполняются с роботизированным управлением.
[0105] В некоторых вариантах осуществления, рассекающий элемент 16 не обязательно должен приблизительно соответствовать петле первоначально, когда его помещают в капсульный мешок 6. Например, рассекающий элемент 16 может быть цельным куском круглой проволоки, который подается в капсульный мешок 6 из стержня 12, без отгибания обратно на себя для формирования петли. В таком варианте осуществления, дистальная оконечность рассекающего элемента 16 является затупленной, чтобы предотвратить прокалывание или повреждение ткани внутри глаза 1. Дистальная оконечность рассекающего элемента 16 может быть выполнена так, что, после подхода к стенке капсульного мешка 6, она может изгибаться либо с предварительно заданным изгибом в его конструкции, либо путем прохода вдоль внутренней поверхности капсульного мешка 6. Затем рассекающий элемент 16 может пересекать промежуток между хрусталиком 8 и капсульным мешком 6 таким образом, что проходит вокруг окружности хрусталика 8. Затем рассекающий элемент 16 может вернуться обратно в поле зрения пользователя в верхний участок капсульного мешка 6, где пользователь может захватить рассекающий элемент 16 элементами на рукоятке 42, например, захватами или полностью отдельным инструментом. В этой точке, рассекающий элемент 16 охватывает хрусталик 8 внутри капсульного мешка 6 и приблизительно соответствует петле. Когда один или оба конца рассекающего элемента 16 натягивают и/или вытягивают, направленное внутрь режущее усилие прикладывается к хрусталику 8 таким образом, что он фрагментируется. Рассекающий элемент 16 по данному варианту осуществления может иметь поперечное сечение, которое позволяет ему изгибаться, предпочтительно, в некоторых направлениях легче, чем в других направлениях, чтобы рассекающий элемент 16 мог изгибаться, как требуется, для прохождения вокруг хрусталика 8, но, тем не менее, следовать по подходящей траектории вокруг хрусталика 8, без ухода с траектории в ткань. Это решение может включать в себя использование поперечного сечения с предпочтительным моментом изгиба, типа «I-образного» профиля, который изгибается, предпочтительно, в некоторых плоскостях. В качестве альтернативы, трубка с вырезами, допускающими изгиб, может быть выполнена с возможностью изгиба в некоторых плоскостях посредством размещения вырезов в данной плоскости. Следовательно, рассекающий элемент 16 может изгибаться вокруг хрусталика 8, в основном, дистально-проксимальным образом. Это может улучшить способность рассекающего элемента 16 проходить по искомой основной траектории относительно капсульного мешка 6 и хрусталика 8. В некоторых вариантах осуществления, рассекающий элемент 16 может быть совершенно гибким, так что его дистальная оконечность не ограничена прохождением по какой-либо предварительно заданной траектории. Дистальная оконечность может быть выполнена с возможностью включения в нее магнита или электромагнитных компонентов, к которым можно прилагать силу с помощью внешнего электромагнитного поля. В таком случае, внешнее устройство можно использовать для управления местоположением дистальной оконечности рассекающего элемента 16 таким образом, чтобы ее можно было направлять вокруг капсульного мешка 6 по искомой траектории. В данном варианте осуществления можно рассматривать возможность любого числа разных траекторий или плоскостей фрагментации. Хирургическое устройство 40 может включать в себя различные средства визуализации, чтобы создать для дистальной оконечности рассекающего элемента 16 искомую траекторию, которая не повреждает капсульный мешок 6.
[0106] В некоторых вариантах осуществления, рассекающий элемент 16 может разветвляться на несколько участков и/или несколько петель. Например, в исходной конфигурации рассекающий элемент 16 может иметь такую форму или профиль, как описано выше. Однако, при переводе во вторую развернутую конфигурацию, рассекающий элемент 16 может разветвляться по его длине на два элемента, которые могут иметь одинаковые или подобные формы, или разные формы, каждая их которых охватывает целый хрусталик 8 или его часть. Это может позволять рассекающему элементу 16 разрезать хрусталик 8 на несколько фрагментов, без применения двух отдельных рассекающих элементов 16.
[0107] В некоторых вариантах осуществления, один или оба рассекающих элемента 16 могут быть выполнены с возможностью подведения энергии одного или более видов, чтобы способствовать тупому разделению или фрагментации хрусталика 8. Например, один или оба рассекающих элемента 16 могут включать в себя один или более участков, выполненных с возможностью включения в них одного или более участков, выполненных с возможностью нагревания за счет использования резистивного электропровода, который нагревается, когда по нему проходит ток. Повышенная температура может улучшать разделение капсульного мешка 6 и хрусталика 8, а также способствовать рассечению хрусталика 8. В качестве альтернативы можно использовать любое число других методов, например, радиочастотную абляцию, прижигание электрическим током, энергию ультразвуковой вибрации или что-то подобное.
[0108] Энергия ультрафиолетового (УФ) излучения может убивать клетки, которые могут быть одной из причин вторичного помутнения капсулы после экстракции первичной катаракты. Облучение капсулы энергией УФ излучения в то время, когда хрусталик отделяют от капсулы хрусталика и рассекают, может снизить скорость побочного вторичного помутнения. Энергию УФ излучения можно подводить через один или более рассекающих элементов 16 устройства. В некоторых вариантах осуществления, рассекающий элемент 16 может быть неметаллической нитью, которую можно использовать для передачи УФ излучения по рассекающему элементу 16. Например, рассекающий элемент 16 может быть сформирован из прозрачного гибкого полимера или другого материала, который может пропускать УФ излучение. Таким образом, рассекающий элемент 16 может действовать как световод для передачи энергии УФ излучения во время захвата и рассечения хрусталика 8. В других вариантах исполнения, рассекающие элементы 16 могут быть сформированы из металла, например, нитиноловой проволоки, и заключены в оболочку из прозрачного полимерного материала, которую можно использовать как световод для пропускания энергии УФ излучения по оболочке, чтобы облучать капсулу.
[0109] В некоторых вариантах осуществления, рукоятка 42 может включать в себя элементы доставки текучей среды. Например, как описано выше, рассекающий элемент 16 или стержень 12 могут допускать впрыскивание текучих среды с помощью соответствующих компонентов. Рукоятка 42 может включать в себя проходы и пути для текучей среды, которые соединяют упомянутые компоненты с внешними источниками текучих сред посредством трубок, встроенных коннекторов или чего-то подобного. В качестве альтернативы, рукоятка 42 может включать в себя внутренние системы впрыска под давлением, которые принуждают текучую среду протекать по стержню 12. Текучая среда может храниться в цилиндре с поршнем, при этом поршень нажимается вперед приводными компонентами в рукоятке 42. Например, отдельный движок или кнопка может соединяться с поршнем и располагаться так, что, когда движок перемещается пользователем, поршень поступательно перемещается и вытесняет текучую среду из цилиндра в систему впрыска. Это может позволять пользователю управлять подачей текучей среды посредством рассекающего элемента 16, стержня 12 или любой другого компонента рукоятку 42 компонент в некоторые моменты времени в ходе процедуры, например, создания промежутка между капсульным мешком 6 и хрусталиком 8. В качестве альтернативы, хирургическое устройство 40 может быть выполнено так, чтобы текучая среда автоматически впрыскивалась хирургическим устройством 40 в течение некоторых периодов в рамках нормального приведения устройства в действие. Например, пружина может быть выполнена с возможностью воздействия усилием на стержень таким образом, чтобы, когда спиральный кулачок 50 перемещается по его канавке, поршень вытеснял некоторое количество текучей среды.
[0110] На фиг. 23 представлен вид сбоку альтернативного варианта осуществления рассекающих элементов 16. Два рассекающих элемента 16 продолжаются из дистального конца стержня 12. В данном варианте осуществления, рассекающие элементы 16 располагаются с обертыванием вокруг хрусталика 8, начиная с дистального конца 8a хрусталика 8, а не вокруг боковых сторон of хрусталик 8 как описано выше. Рассекающие элементы 16 можно выдвигать по одному за раз из дистального конца стержня 12 в дистальном направлении к дистальному концу 8a хрусталика 8 и в капсульный мешок. Рассекающий элемент 16 может приблизительно соответствовать проволочной петле, которая выполнена с возможностью придания ей предварительно заданной формы и искривлений, чтобы допускать ее прохождение вокруг хрусталика 8, без воздействия избыточным усилием на капсульный мешок. Такое выполнение может включать в себя поперечные изгибы, а также прямые и обратные искривления, которые формируют различные трехмерные геометрии, когда рассекающий элемент 16 раздвигается из устройства доставки. Для входа в капсульный мешок и захвата хрусталика 8, рассекающие элементы 16 выполнены с возможностью образования разной формы, когда они развертываются. Вместо расположения в плоскости, данные рассекающие элементы 16 отгибаются вниз от стержня 12 во второй конфигурации, как видно на фиг. 23. Когда применяется несколько рассекающих элементов 16, каждый может быть выполнен с возможностью отгибания на отличающийся угол, по сравнению с другим или другими элементами. Один конец рассекающего элемента 16 можно выдвигать, тогда как другой остается относительно зафиксированным к устройству доставки, или оба конца можно выдвигать одновременно, как описано выше. Как описано выше, рассекающий элемент может иметь различные профили, материалы или гибкости по его длине.
[0111] Один из рассекающих элементов 16 можно выдвигать для пересечения промежутка между капсульным мешком и хрусталиком 8 и затем можно перемещать вниз и проксимально вокруг хрусталика 8. Второй рассекающий элемент 16 можно выдвигать, как показано, и можно применить любое число других рассекающих элементов 16. В некоторых вариантах осуществления, выдвигающийся вперед рассекающий элемент 16 можно применять в комбинации с вышеописанным выдвигающимся вбок рассекающим элементом 16, чтобы создать пересекающиеся плоскости фрагментации таким образом, что два рассекающих элемента 16 могут разрезать хрусталик на 4 отдельных фрагмента. Кроме того, плоскости фрагментации могут находиться под любым числом углов друг относительно друга, и рассекающие элементы 16 могут выдвигаться вокруг хрусталика 8 с любого числа направлений, например, в вариантах осуществления, сочетающих выдвижение вперед и выдвижение вбок.
[0112] Фиг. 24A-24E, фиг. 25A-25C, фиг. 26A-26N, фиг. 27A-27C, фиг. 28A-28B, фиг. 29A-29B, фиг. 30A-30E, фиг. 31A-31F изображают взаимосвязанные варианты исполнения устройства 2440 для фрагментации хрусталика 8 внутри капсульного мешка 6 и для удаления хрусталиковой ткани из глаза 1. Одинаковые или сходные числовые позиции могут относиться к одинаковым или сходным конструкциям. Аспекты, описанные в отношении одинаковых или сходных конструкций, могут быть равным образом применимы к конструкциям, описанным в любом месте настоящей заявки. Признаки, аспекты и способы применения каждого из устройств и способов, описанных в настоящей заявке, могут быть равным образом применимы к вариантам исполнения нижеописанных устройств и способов.
[0113] Как и в случае других вариантов исполнения, описанных в любом месте настоящей заявки и показанных на фиг. 24A-24E, устройство 2440 может включать в себя корпус 2442, имеющий передний конус 2443. Дистальный стержень 2412 может продолжаться из корпуса 2442 вдоль продольной оси устройства, при этом стержень 2412 имеет просвет и дистальный конец. Устройство может включать в себя режущий элемент 2416, перемещаемый по просвету стержня 2412. Режущий элемент и стержень 2412 выполнены с возможностью введения через разрез 4 в роговице 2. Например, дистальный стержень 2412 может иметь внешний диаметр, выполненный в размер для продолжения через самогерметизирующийся разрез в роговице 2. Стержень 2412 может иметь внешний диаметр, выполненный с возможностью введения внутрь передней камеры, который составляет от приблизительно 0,5 мм до приблизительно 2,5 мм. В некоторых вариантах осуществления, стержень 2412 может иметь постоянный внешний диаметр по его длине от переднего конуса 2443 до дистальной оконечности стержня 2412. Внешний диаметр стержня 2412 может также быть непостоянным внешним диаметром по длине стержня. Например, в некоторых вариантах осуществления, стержень 2412 может сужаться к дистальному выходному отверстию 2405, так что внешний диаметр около дистальной оконечности меньше, чем внешний диаметр около переднего конуса 2443. В еще одним вариантах исполнения, стержень 2412 может иметь скошенную кромку вблизи дистального выходного отверстия 2405. К обращенному вперед, дистальному концу корпуса 2442 может быть присоединена гофрированная трубка 2445 (смотри фиг. 24E). Гофрированная трубка 2445 может иметь цилиндрическую форму и охватывать проксимальный конец дистального стержня 2412, продолжающийся через передний конус 2443. Гофрированная трубка 2445 может быть относительно мягким элементом. Дистальный конец гофрированной трубки 2445 выполнен с возможностью зацепления и уплотнения с внешней поверхностью глаза, окружающей разрез 4 после введения стержня 2412 через разрез 4. Гофрированная трубка 2445 может обеспечивать визуальное указание глубины проникновения. Стержень 2412 достигает надлежащей глубины проникновения после того, как дистальный конец гофрированной трубки 2445 приходит в контакт с внешней поверхностью глаза. Гофрированная трубка 2445 может, тем самым, дополнительно предотвращать слишком глубокое введение стержня 2412 в глаз сверх некоторой искомой глубины. В некоторых вариантах осуществления, во внешней поверхности гофрированной трубки 2445 может быть сформировано множество канавок 2447, придающих данной трубке кольчатый вид. Канавки 2447 позволяют гофрированной трубке 2445 сжиматься вдоль продольной оси, при приложении усилия, и раздвигаться вдоль продольной оси для удлинения после снятия усилия.
[0114] Режущий элемент устройства 2440 включает в себя один или более рассекающих элементов 2416, выдвигаемых через просвет дистального стержня 2412. Каждый рассекающий элемент 2416 может включать в себя первый конец, второй конец и дистальную петлю, сформированную между первым и вторым концами, как подробнее описано ниже. По меньшей мере, участок каждого рассекающего элемента 2416 может вмещаться внутри соответствующего одного или более вторичных трубчатых элементов или оболочек, или втулок 2415 (смотри фиг. 24E или 26A), которые, в свою очередь, вмещаются в просвет дистального стержня 2412. Режущий элемент выполнен с возможностью перехода из первой, отведенной конфигурации в сторону второй развернутой конфигурации, при приведении в действие исполнительного механизма на устройстве 2440. Во второй развернутой конфигурации, дистальная петля каждого из рассекающих элементов образует увеличенную раскрытую область. Увеличенные раскрытые области могут располагаться снаружи дистального конца стержня 2412 и иметь первую ножку, выдвигаемую дистально относительно дистального конца стержня, и вторую ножку, расположенную проксимально относительно дистального конца стержня. Дистальные петли, образующие увеличенные раскрытые области каждого из рассекающих элементов 2416, могут быть выровнены, в общем, параллельно друг другу в плоскости (например, вертикальной плоскости), когда режущий элемент находится во второй развернутой конфигурации. Второе приведение в действие исполнительного механизма или второго, другого исполнительного механизма может вынуждать дистальные петли, образующие увеличенные раскрытые области, по меньшей мере, одного или более рассекающих элементов, совершать угловое перемещение относительно плоскости, для перевода, тем самым, режущего элемента в третью, отклоненную конфигурацию. Второе приведение в действие исполнительного механизма или второго, другого исполнительного механизма может вынуждать дистальные петли увеличенных раскрытых областей каждого рассекающего элемента совершать угловое перемещение друг от друга, например, перемещение двух рассекающих элементов в положение под углом друг к другу, что переводит режущий элемент в третью, отклоненную конфигурацию.
[0115] Рассекающие элементы 2416 выполнены с возможностью развертывания внутри глаза таким образом, что петли или раскрытые области увеличиваются на дистальном конце рассекающих элементов 2416 и достигают размера для охвата, по меньшей мере, участка хрусталика 8, расположенного внутри капсульного мешка 6. Раскрытые области, образованные дистальными петлями рассекающих элементов 2416, выполнены с возможностью развертывания из первой, отведенной конфигурации для введения (фиг. 24A) во вторую развернутую конфигурацию (фиг. 24B) и в третью, отклоненную конфигурацию (фиг. 24C). При перемещении из стянутого положения (фиг. 24A) к ненапряженной форме развернутого положения (фиг. 24B), каждый из одного или более рассекающих элементов 2416 может формировать дистальную петлю, имеющую ненапряженную (свободную) форму, которая образует раскрытую область 2446, заданную в ориентации, которая максимально увеличивает раскрытую область 2446. Следует понимать, что использование термина «петля» в отношении режущего конца ненапряженной, свободной формы рассекающих элементов 2416 не ограничивает наличие конкретной, например, круглой формы у раскрытой области 2446. Форма петли может быть овальной, эллиптической или другой неправильной формой, негеометрической формой. Петля не нуждается также в том, чтобы быть полностью замкнутой.
[0116] Устройства описаны как пригодные для разрезания всего хрусталика внутри капсульного мешка, но могут применяться для других целей, без отступления от различных аспектов описанных устройства и способов. Рассекающие элементы, описанные в настоящей заявке, могут располагаться и продолжаться между капсульным мешком и передней стороной хрусталика, благодаря естественному развертыванию петли в направлении к развернутой форме. При разрезании хрусталика, петли могут продолжаться вокруг задней и передней поверхностей, чтобы формировать полный разрез хрусталика. Петли можно также перемещать между задней поверхностью хрусталика и капсульного мешка, чтобы отделять хрусталик от капсульного мешка перед разрезанием хрусталика на фрагменты. Устройства, описанные в настоящей заявке, особенно полезны при атравматичном протягивании между мешком и хрусталиком, когда хрусталик еще находится в целом состоянии.
[0117] В варианте исполнения, рассекающий элемент 2416 может включать в себя три рассекающих элемента 2416a, 2416b, 2416c, из которых промежуточная петля или рассекающий элемент 2416b располагается, в общем, между первым и вторым рассекающими элементами 2416a, 2416c (смотри фиг. 24D). Промежуточный рассекающий элемент может аналогичным образом включать в себя первый конец, второй конец и дистальную петлю, сформированная между первым и вторым концами. Когда режущий элемент переводят в направлении ко второй развернутой конфигурации, дистальная петля промежуточного рассекающего элемента может образовать увеличенную раскрытую область, расположенную снаружи дистального конца стержня 2412. Увеличенная раскрытая область может иметь первую ножку, выдвигаемую дистально относительно дистального конца стержня, и вторую ножку, расположенную проксимально относительно дистального конца стержня. В данном варианте исполнения, рассекающие элементы 2416a, 2416b, 2416c выполнены с возможностью развертывания из первой, отведенной конфигурации (фиг. 24A) во вторую развернутую конфигурацию (фиг. 24B) и в третью, отклоненную конфигурацию (фиг. 24C). Увеличенные раскрытые области каждого из первого, второго и промежуточного рассекающих элементов могут быть выровнены, в общем, параллельно друг другу в плоскости, при нахождении во второй развернутой конфигурации. В третьей, отклоненной конфигурации, внешние два рассекающих элемента 2416a, 2416c могут быть перемещены под углом от промежуточного рассекающего элемента 2416b. Второе приведение в действие исполнительного механизма или второго, другого исполнительного механизма может вынуждать увеличенные раскрытые области как первого, так и второго рассекающих элементов совершать угловое перемещение от промежуточного рассекающего элемента, что переводит режущий элемент в третью, отклоненную конфигурацию. Рассекающие элементы 2416a, 2416b, 2416c можно приводить в движение для перемещения из стянутого положения к ненапряженной форме отклоненного положения, например, посредством движка 2444 или другого приводного механизма, расположенного на корпусе 2442. Рассекающие элементы 2416a, 2416b, 2416c можно также приводить в движение для перемещения в направлении к третьей, отклоненной конфигурации посредством движка 2444 и/или другого приводного механизма, расположенного на корпусе 2442. Как подробнее описано ниже, устройство 2440 может включать в себя двухфазное развертывание, в ходе которого развертывание петель во вторую развернутую конфигурацию может выполняться независимо от отклонения в третью, отклоненную конфигурацию.
[0118] Как описано в других местах в настоящей заявке, рассекающие элементы 2416 могут быть сформированы из сверхупругого металлического и/или полимерного материала. Корпус 2442 устройства 2440 может быть сформирован из относительно жесткого(их), облегченного(ых) материала(ов). Стержень 2412, соединенный с дистальной концевой областью корпуса 2442, может иметь просвет, продолжающийся через него к дистальному выходному отверстию 2405. Стержень 2412 может иметь овальное поперечное сечение со скругленным наконечником. Овальное поперечное сечение улучшает возможность введения стержня 2412 в глаз 1 через роговичный разрез 4. Овальное поперечное сечение допускает также параллельное расположение множества рассекающих элементов 2416a, 2416b, 2416c внутри просвета. В качестве альтернативы, стержень 2412 может иметь круглое поперечное сечение или поперечное сечение любой другой подходящей формы.
[0119] Дистальный конец рассекающих элементов 2416 может продолжаться из выходного отверстия 2405 из просвета, при нахождении в первой, отведенной конфигурации (смотри фиг. 24A). В таких вариантах осуществления, изгиб 24 малого радиуса может располагаться снаружи стержня 2412, будучи уже отогнутым, по меньшей мере, частично, в проксимальном направлении (смотри фиг. 24B). Таким образом, даже в вариантах исполнения, в которых рассекающий элемент 2416 изготовлен из сверхупругого материала, уменьшен угол, под которым участок рассекающего элемента 2416 изгибается во время перехода из первой, отведенной конфигурации во вторую развернутую конфигурацию. Кроме того, внутри просвета стержня 2412, для удерживания части рассекающего элемента 2416 может требоваться меньше места, чем для удерживания его целиком, что позволяет делать стержень 2412 меньше в диаметры. В качестве альтернативы, рассекающие элементы 2416 могут целиком располагаться внутри просвета стержня 2412 в первой, отведенной конфигурации. Дистальный конец рассекающего элемента 2416, неважно, внутри или снаружи просвета в первой, отведенной конфигурации, выполнен с размером и по форме для прохождения через чисто роговичный разрез 4 без повреждения глаза 1. В общем, чисто роговичные разрезы 4 имеют размер меньше, чем приблизительно 3,5 мм, хотя данный размер может изменяться. Максимальный внешний диаметр дистальной концевой области стержня 2412, включающей в себя рассекающие элементы 2416 в первой, отведенной конфигурации, может быть меньше, чем приблизительно 3,5 мм, так что их можно вводить через чисто роговичный разрез, например, с размером, приблизительно, от 1,5 мм до 3,5 мм.
[0120] Как описано в других местах в настоящей заявке, и как показано на фиг. 26A, каждый из рассекающих элементов 2416 может включать в себя первый конец 2418 и второй конец 2420, по меньшей мере, один из которых подвижен относительно стержня 2412. Например, один конец (например, первый конец 2418) рассекающих элементов 2416 может быть зафиксирован относительно стержня 2412, и другой конец (например, второй конец 2420) рассекающих элементов 2416 может быть передвигаемым относительно стержня 2412. Когда передвигаемый конец выталкивается дистально (т.е. аксиально вдоль продольной оси устройства), рассекающие элементы 2416 поступательно перемещаются из первой, отведенной конфигурации в сторону второй развернутой конфигурации. Когда передвигаемый конец отводится проксимально, если имеет возможность, рассекающие элементы 2416 поступательно перемещаются из второй развернутой конфигурации к первой, отведенной конфигурации. Следует понимать, что оба конца 2418, 2420 могут быть передвигаемыми относительно стержня 2412, как описано в других местах в настоящей заявке, и как подробнее описано ниже. Применяемые термины «первый», «второй» или «третий» не предполагают ограничения и могут быть взаимозаменяемыми в настоящей заявке, если прямо не указано иначе.
[0121] Рассекающие элементы 2416 после выдвижения из просвета стержня 2412 могут иметь дистальную концевую область или дистальную петлю, которая приблизительно соответствует раскрытой области или образует ее, в общем, в виде петли неправильной формы, имеющей поперечное сечение естественного хрусталика 8. Это позволяет увеличенной раскрытой области 2446 рассекающих элементов 2416 охватывать хрусталик 8 внутри капсульного мешка 6. Когда конец или концы 2418, 2420 выталкиваются дистально из просвета, рассекающие элементы 2416 переходят во вторую развернутую конфигурацию. Когда рассекающие элементы 2416 выходят из стержня 2412, изгиб 24 малого радиуса позволяет проксимальной секции рассекающих элементов 2416 выдвигаться проксимально из дистального конца стержня 2412 в местоположение, отстоящее от и в одну боковую сторону от продольной центральной линии просвета 2412 (т.е. продольной оси A устройства 2440), в направлении к капсульному мешку 6. Таким образом, рассекающие элементы 2416 способны выдвигаться вниз через капсулорексис 10 и растягиваться в длину внутри капсульного мешка 6, который больше диаметра капсулорексиса 10. Например, рассекающие элементы 2416 можно перемещать относительно стержня 2412 из первой, отведенной конфигурации в направлении ко второй развернутой конфигурации, в которой больший участок каждого рассекающего элемента 2416 выдвинут из дистального конца просвета 2450. По меньшей мере, участки рассекающих элементов 2416 располагаются внутри просвета, при нахождении в первой, отведенной конфигурации. Следует понимать, что некоторые из рассекающих элементов 2416 могут продолжаться снаружи просвета, но что рассекающие элементы 2416 и стержень 2412 по-прежнему имеют размеры для введения в переднюю камеру глаза через небольшой роговичный разрез (например, чисто роговичный разрез). Перемещение из первой, отведенной конфигурации в направлении ко второй развернутой конфигурации может вынуждать, по меньшей мере, один из концов 2418, 2420 выдвигаться дистально относительно дистального конца стержня 2412, чтобы сформировать раскрытую область 2446, при этом раскрытые области 2446 ограничены их соответствующими рассекающими элементами 2416 и дистальным концом 2405 стержня 2412. По меньшей мере, участок рассекающих элементов 2416, ограничивающих раскрытую область 2446, продолжается проксимально относительно дистального конца 2405 стержня 2412. Вторая, развернутая конфигурация рассекающих элементов 2416 имеет такие размер и форму, чтобы допускать продвижение рассекающих элементов 2416 между капсульным мешком 6 и хрусталиком 8 глаза в то время, когда хрусталик остается в капсульном мешке 6, чтобы захватывать участок хрусталика 8 внутри раскрытой области 2446. Когда рассекающие элементы 2416 продолжают развертываться, плоскость, формируемую рассекающими элементами 2416, можно поворачивать так, чтобы рассекающие элементы пересекали промежуток между капсульным мешком 6 и хрусталиком 8. Плоскость формы можно повернуть, в основном, в вертикальное положение или под любым числом других углов относительно вертикали. Поворот может выполняться пользователем путем ручного поворота стержня 2412 хирургического устройства 2440. Поворот может выполняться механизмами, встроенными в хирургическое устройство 2440, как описано в других местах в настоящей заявке.
[0122] Как упоминалось выше, устройство 2440 включает в себя исполнительный механизм для натяжения рассекающих элементов 2416, чтобы уменьшать размер раскрытых областей 2446 и разрезать хрусталик 8. Исполнительный механизм может быть движком 2444, передвигаемым относительно корпуса 2442, например, вдоль продольной оси корпуса. Движок 2444 является передвигаемым по верхней поверхности корпуса 2442. Следует понимать, что применение термина «движок» не предполагает ограничения, и в настоящей заявке предполагаются другие конфигурации исполнительного механизма. Например, приводной механизм может быть кнопкой, переключателем, головкой или другим элементом сопряжения. Как лучше всего показано на фиг. 26A-26C, движок 2444 может иметь рабочее соединение с передвижным узлом 2472, расположенным во внутреннем объеме корпуса 2442, посредством одного или более пальцев 2448, которые продолжаются вверх через паз 2474 в верхней поверхности корпуса 2442. Палец(пальцы) 2448 могут соединяться с нижней поверхностью движка 2444. Движок 2444 и передвижной узел 2472 является передвигаемыми во внутреннем объеме корпуса 2442 вдоль продольной оси A корпуса 2442. Как показано на фиг. 26A, к передвижному узлу 2472, содержащему отвод 2482 и проксимальный штырек 2478, может быть присоединено множество держателей 2476 петель. Отвод 2482 может продолжаться наружу от проксимального штырька 2478. Проксимальный штырек 2478 может быть, в общем, цилиндрическим и выполненным с возможностью вмещения через соответствующий канал 2480 передвижного узла 2472 (смотри фиг. 26B), и выполненным с возможностью поворота вокруг его соответствующей оси вращения внутри канала 2480.
[0123] Как упоминалось, проксимальный штырек 2478 выполнен с возможностью поворота вокруг его соответствующей оси вращения внутри его соответствующего канала 2480. Передвижной узел 2472 может быть соединен с первым и вторым держателями 2476a, 2476c петель, расположенными с каждой стороны продольной оси A устройства 2440 (смотри фиг. 26C-26E). Поворот держателей 2476a, 2476c петель вокруг их соответствующих осей R1, R2 вращения и, следовательно, поворотное перемещение отводов 2482a, 2482c может быть зеркальным отображением. Фиг. 26D изображает держатели 2476a, 2476c петель до отклонения. Отводы 2482a, 2482c держателей 2476a, 2476c петель располагаются в, по существу, вертикальном положении, так что они располагаются, по существу, параллельно друг другу. Во время отклонения, держатель 2476a петли, расположенный с одной стороны от продольной оси A, поворачивается в первом направлении вокруг его оси R1 вращения (например, по часовой стрелке), и держатель 2476c петли, расположенный с противоположной стороны от продольной оси A, поворачивается во втором направлении вокруг его оси R2 вращения (например, против часовой стрелки). Отводы 2482a, 2482c отклоняются наружу из, по существу, вертикального исходного положения (например, ортогонального продольной оси A) в, по существу, невертикальное положение. Величина поворота, достигаемого каждым из отводов 2482a, 2482c, может изменяться, но, обычно, составляет от приблизительно 15 градусов до приблизительно 45 градусов относительно вертикального исходного положения.
[0124] Поворот держателей 2476 петель вызывает соответствующий поворот дистальных петель, образующих увеличенные раскрытые области 2446 рассекающих элементов 2416, и, тем самым, переводит режущий элемент в отклоненную конфигурацию. Отклоненная конфигурация режущего элемента может изменяться. Как описано в настоящей заявке, дистальный петли, образующие увеличенные раскрытые области могут перемещаться в угловом направлении друг от друга, с переводом режущего элемента в отклоненную конфигурацию, при этом угловое перемещение происходит относительно плоскости продольной оси устройства (или продольной оси стержня или продольной оси просвета, через который продолжается режущий элемент). Когда режущий элемент находится в развернутой конфигурации, так что раскрытые области, образованные дистальными петлями, развернуты или иначе увеличены из их исходной конфигурации введения (обычно называемой отведенной конфигурацией), дистальный петли, образующие раскрытые области, могут располагаться, в основном, параллельно друг в другу в плоскости, например, вертикальной плоскости, относительно продольной оси стержня. Следует понимать, что, когда дистальный петли и их увеличенные раскрытые области, в общем, совмещены с плоскостью параллельно друг другу, один или более участков такой дистальной петли могут продолжаться наружу из плоскости. Это означает, что увеличенные раскрытые области, образованные дистальными петлями, могут принимать форму, которая не является плоской (смотри, например, рассекающий элемент 16, показанный на фиг. 2), но увеличенные раскрытые области рассекающих элементов могут располагаться, по существу, параллельно друг другу и, по существу, в плоскости относительно устройства, при нахождении во второй развернутой конфигурации. Также следует понимать, что увеличенные раскрытые области не обязательно должны быть полностью увеличенными, чтобы быть отклоненными друг относительно друга. Таким образом, когда в настоящей заявке упоминается вторая, развернутая конфигурация, дистальные петли, при этом, не обязательно должны быть развернуты в их максимально развернутую конфигурацию. Вторая, развернутая конфигурация может включать в себя увеличенную конфигурацию, в которой увеличенные раскрытые области, образованные дистальными петлями, развернуты меньше, чем максимальное развертывание, перед тем, как их отклоняют друг относительно друга. Фиг. 24B показывает рассекающие элементы 2416, имеющие увеличенные раскрытые области 2446, которые уже развернуты, в общем, в двух направлениях (т.е. вдоль осей X и Y) и еще не отклонены, так что они все еще, в общем, прижаты друг к другу (т.е. вдоль оси Z). Фиг. 24C показывает рассекающие элементы 2416 в отклоненной конфигурации, в которой одна или более из дистальных петель, образующих увеличенные раскрытые области, перемещены в угловом направлении друг от друга (например, вдоль оси Z). В некоторых вариантах осуществления, режущий элемент содержит два рассекающих элемента, и дистальные петли, образующие увеличенные раскрытые области двух рассекающих элементов, отклоняются на расстояние в направлении оси Z. Один участок увеличенной раскрытой области каждой дистальной петли (т.е. участок, совмещенный с продольной осью просвета стержня 2412) может оставаться, в общем, прижатым к соседней дистальной петле, тогда как другой участок увеличенной раскрытой области (т.е. участок ниже продольной оси просвета стержня 2412) может быть отклонен от соседней дистальной петли. Этот участок петли, который повернут и, тем самым, отклонен, может располагаться под углом относительно плоскости продольной оси стержня. Угол может изменяться, например, от приблизительно 15 градусов относительно плоскости до приблизительно 45 градусов относительно плоскости.
[0125] Один или более рассекающих элементов 2416 могут иметь зафиксированный первый конец 2418 и передвигаемый второй конец 2420. Например, передвигаемые вторые концы 2420 рассекающих элементов 2416a, 2416c допускают перемещение вдоль продольной оси A устройства 2440 таким образом, что они могут быть размещены во вторую развернутую конфигурацию (смотри фиг. 26B-26C). Передвигаемые вторые концы 2420a, 2420c двух внешних рассекающих элементов 2416a, 2416c дополнительно способны к угловому перемещению относительно продольной оси A. Второй конец 2420b промежуточного рассекающего элемента 2416b (показанного на фиг. 24D) может быть зафиксирован так, что он не поворачивается или перемещается в угловом направлении относительно продольной оси A. Например, зафиксированный первый конец 2418a первого рассекающего элемента 2416a может быть зафиксирован так, что он остается неподвижным во время приведения в действие, и передвигаемый второй конец 2420a первого рассекающего элемента 2416a может быть выполнен с возможностью перемещения относительно продольной оси A устройства 2440 вдоль, по меньшей мере, двух плоскостей. Аналогично, зафиксированный первый конец 2418c второго рассекающего элемента 2416c может быть зафиксированный может быть зафиксирован так, что он остается неподвижным во время приведения в действие, и передвигаемый второй конец 2420c второго рассекающего элемента 2416c может быть выполнен с возможностью перемещения относительно продольной оси A устройства 2440 вдоль, по меньшей мере, двух плоскостей. Зафиксированный первый конец 2418b промежуточного рассекающего элемента 2416b может быть зафиксирован так, что он остается неподвижным во время приведения в действие, и передвигаемый второй конец 2420b промежуточного рассекающего элемента 2416b может быть выполнен с возможностью перемещения относительно продольной оси A устройства 2440. Однако, промежуточный рассекающий элемент 2416b может быть выполнен с возможностью перемещения вдоль единственной плоскости и не может быть способным к поворотному или угловому перемещению относительно продольной оси A. По существу, все три рассекающих элемента 2416a, 2416b, 2416c могут быть выполнены с возможностью развертывания, при приведении в действие движка 2444, например, посредством перемещения их соответствующих передвигаемых вторых концов 2420a, 2420b, 2420c вдоль продольной оси A устройства 2440. Внешние два рассекающих элемента 2416a, 2416c могут иметь передвигаемые вторые концы 2420a, 2420c, дополнительно способные к угловому перемещению относительно продольной оси A. Передвигаемый второй конец 2420b промежуточного рассекающего элемента 2416b может быть зафиксирован так, что он не перемещается. Следует понимать, что относительные отклоняющиеся перемещения множества рассекающих элементов 2416 могут изменяться, и данный случай является примером того, как может происходить отклонение. Каждый из множества рассекающих элементов 2416 может иметь конец, способный к поступательному перемещению вдоль продольной оси A устройства, а также к поворотным и/или угловым перемещениям относительно продольной оси A.
[0126] Как показано на фиг. 26B-26E, поворотное перемещение держателей 2476 петель вокруг их соответствующих осей вращения R1, R2 обеспечивает поворотное угловое смещение, которое вынуждает внешние рассекающие элементы 2416a, 2416c отклониться от промежуточного рассекающего элемента 2416b. Один или более рассекающих элементов могут не представляться на фигурах для ясности. В варианте исполнения, зафиксированные первые концы 2418a, 2418b, 2418c каждого из трех рассекающих элементов 2416a, 2416b, 2416c могут быть присоединены к области корпуса 2442 или другого неподвижного компонента устройства 2440. Передвигаемые вторые концы 2420a, 2420c внешних двух рассекающих элементов 2416a, 2416c могут быть присоединены к дистально обращенным поверхностям их соответствующих держателей 2476 петель. Например, первый из держателей петель, 2476a, может соединяться с передвигаемым вторым концом 2420a первого рассекающего элемента 2416a, и второй держатель 2476c петли может соединяться с передвигаемым вторым концом 2420c второго рассекающего элемента 2416c (смотри фиг. 26C). Когда держатели 2476a, 2476c петель поворачиваются вокруг их осей вращения R1, R2, концы 2420a, 2420c поступательно перемещаются вместе с ними вокруг осей вращения R1, R2 в направлении к третьей, отклоненной конфигурации. Фиг. 26C изображает третью, отклоненную конфигурацию, в которой держатель 2476a первой петли повернут по часовой стрелке (по стрелке C) таким образом, что отвод 2482a отклоняется влево от вертикали, и держатель 2476c второй петли повернут против часовой стрелки (по стрелке CC) таким образом, что отвод 2482c отклоняется вправо от вертикали. Передвигаемые концы 2420a, 2420c рассекающих элементов 2416a, 2416c передвигаются вместе с держателями 2476a, 2476c петель в направлении продольной оси A устройства 2440, вынуждая петли отклоняться наружу от продольной оси A. Передвигаемый второй конец 2420b промежуточного рассекающего элемента 2416b (не показанного на фиг. 26C) может быть присоединен к передвижному узлу 2472 таким образом, что перемещения держателей 2476 петель не влияет на его положение относительно продольной оси A.
[0127] В некоторых вариантах осуществления, устройство 2440 может дополнительно включать в себя тонкостенную втулку 2415 небольшого диаметра, которая выполнена с возможностью перемещения относительно продольной оси устройства (смотри фиг. 24E). По меньшей мере, участок множества рассекающих элементов 2416 может продолжаться сквозь втулку 2415. Когда втулка 2415 выдвинута дистально по большей длине рассекающих элементов 2416, втулка 2415 препятствует отклонению рассекающих элементов 2416 друг от друга и/или от продольной оси A устройства 2440, даже когда их петли развернуты. Когда втулка 2415 отводится в направлении к проксимальному концу устройства 2440, рассекающие элементы 2416 могут свободно отклоняться. Отведение втулки 2415 может выполняться вручную пользователем. В качестве альтернативы, отведение втулки 2415 может происходить автоматически в течение фаз размещения рассекающих элементов 2416. Рассекающие элементы 2416 выполнены с возможностью развертывания из первой отведенной конфигурации во вторую, развернутую конфигурацию. Втулка 2415 может располагаться вокруг отрезка длины рассекающих элементов 2416 таким образом, который позволяет их соответствующим петлям достигать увеличенного состояния, но предотвращает отклонение или угловое перемещение рассекающих элементов 2416 относительно продольной оси. Приведение в движение рассекающих элементов 2416 из второй, развернутой конфигурации в направлении к третьей, отклоненной конфигурации может также отводить втулку 2415. Отведение втулки 2415 может происходить поэтапно (отведение, затем отклонение) таким образом, что возможно отклонение рассекающих элементов 2416 относительно продольной оси. Каждый рассекающий элемент 2416 может быть жестко присоединен к его соответствующей втулке 2415. В случае, когда устройство включает в себя единственный рассекающий элемент 2416, то возможно наличие единственной втулки 2415. В случае, когда устройство включает в себя два рассекающих элемента 2416, возможно наличие двух втулок 2415, по одной для каждого рассекающего элемента 2416 и так далее. Каждая втулка 2415 допускает продольное, боковое и поворотное движение ее рассекающего элемента 2416. Продольное движение допускает вытягивание и развертывание дистальных петель за пределы дистального отверстия 2405 стержня 2412. Боковое и поворотное движение допускает отклонение или веерное раскрытие дистальных петель. Втулки 2415 для каждого рассекающего элемента 2416 способствуют предотвращению «скручивания» проволок, когда рассекающими элементами 2416 манипулируют, и обеспечивают достаточную торсионную жесткость для вытягивания и отклонения.
[0128] Отводы 2482 держателей 2476 петель могут поджиматься в отклоненную конфигурацию клином 2490, расположенным на передвижном узле 2492 клина. Клин 2490 может располагаться в дистальной концевой области корпуса и иметь наклонную поверхность 2494, обращенную к проксимальному концу устройства 2440. Перемещение отводов 2482 к клину 2490 вынуждает отводы 2482 разжиматься друг от друга и отклоняться наружу (смотри фиг. 26D-26F). Как описано выше, держатели 2476 петель могут быть присоединены к передвижному узлу 2472, который может сдвигаться вдоль продольной оси A устройства 2440 с помощью движка 2444. Дистальное перемещение передвижного узла 2472 может вынуждать отводы 2482 держателей 2476 петель упираться в клин 2490 и сдвигаться вдоль наклонных поверхностей 2494. Отводы 2482 могут поворачиваться вокруг их соответствующих осей вращения таким образом, что они отклоняются друг от друга, когда они сдвигаются вдоль наклонной поверхности 2494 в дистальном направлении в направлении более толстого участка клина 2490. В некоторых вариантах осуществления, клин 2490 является перемещаемым в проксимальном направлении и может передвигаться вплотную к передвижному узлу 2472, чтобы отклонять отводы 2482 держателей 2476 петель.
[0129] Размещение может быть поэтапным размещением, включающим в себя этап развертывания, за которым следует этап отклонения. Размещение может быть также поэтапным размещением, включающим в себя этап развертывания, за которым следует этап поворота, и после него следует этап отклонения. Если устройство включает в себя отводимую втулку 2415, регулирующую отклонение рассекающих элементов, то поэтапное размещение может дополнительно включать в себя этап отведения втулки перед или сочетаться с этапом отклонения. Скользящее перемещение движка 2444 относительно корпуса 2442 перемещает передвижной узел 2472 на первое расстояние, чтобы обеспечить развертывание петель из первой отведенной конфигурации в направлении ко второй, развернутой конфигурации. Скользящее перемещение движка 2444 относительно корпуса 2442 перемещает передвижной узел 2472 на второе расстояние дальше первого расстояния, чтобы обеспечить отклонение петель (т.е. третью, отклоненную конфигурацию). Поворот развернутых петель описан в другом месте в настоящей заявке, как выполняемый механическим элементом внутри самого устройства, или может выполняться пользователем.
[0130] Механизм отклонения может дополнительно включать в себя элемент, выполненный с возможностью обеспечения обратной связи с пользователем в отношении того, где в первой фазе размещения располагается движок 2444. Например, как лучше всего показано на фиг. 26M и 26N, элемент 2493 обратной связи с пользователем может быть фиксирующей пружиной отклонения, выполненной с возможностью контакта с держателями 2476 петель непосредственно перед тем, как отводы 2482 начинают отклоняться. Элемент 2493 обратной связи с пользователем может быть присоединен около дистальной концевой области корпуса 2442, несколько проксимально от наклонной поверхности 2494, обращенной в направлении проксимального конца устройства 2440. Элемент 2493 обратной связи с пользователем может включать в себя две пружины 2491, поджатые в направлении к центральной линии передвижного узла 2492 клина, при этом дистальные концы пружин 2491, расположенные несколько проксимально от наклонной поверхности 2494 клина 2490. Когда передвижной узел 2472 движка перемещается аксиально в дистальном направлении относительно передвижного узла 2492 клина, отводы 2482 передвижного узла 2472 движка сдвигаются между пружин 2491. Дистальные концы пружин 2491 можгут располагаться ближе друг к другу, чем проксимальные концы пружин 2491, таким образом, что пружины 2491 отгибаются от центральной линии передвижного узла 2492 клина и друг от друга, когда отводы 2482 прошли между ними в дистальном направлении. Каждая пружина 2491 может включать в себя фиксирующее углубление 2501 около внутренней поверхности их дистальной концевой области. Фиксирующее углубление 2501 формирует вогнутость, имеющую размер и форму для вмещения внешнего диаметра его соответствующего отвода 2482. При достижении местоположения фиксирующего углубления 2501, отводы 2482 заскакивают в их фиксирующие углубления 2501, что обеспечивает тактильную и/или звуковую обратную связь, которая указывает пользователю, что отводы 2482 вскоре придут в контакт с наклонными поверхностями 2494 клина 2490, если движок 2444 сдвигать дальше в дистальном направлении. После дальнейшего дистального выдвижения движка 2444, отводы 2482 проходят за пределы фиксирующих углублений 2501 пружин 2491 и упираются в проксимально обращенные наклонные поверхности 2494 клина 2490, чтобы начинать их поворот.
[0131] В некоторых конфигурациях, первоначальное, протяженное дистально-направленное перемещение движка 2444 обеспечивает вторую, развернутую конфигурации и окончательное, короткое дистально-направленное перемещение движка 2444 сверх того обеспечивает третью, отклоненную конфигурацию. Данное поэтапное размещение может развертывать петли, при первом приведении в действие (т.е. сдвигании движка 2444 на первое расстояние), и может отклонять петли, при втором приведении в действие (т.е. сдвигании движка 2444 на второе расстояние больше первого расстояния). В некоторых конфигурациях, третья, отклоненная конфигурация обеспечивается проксимально-направленным перемещением клина 2490 в направлении отводов 2482. В данной конфигурации, относительно положение передвижного узла 2472 движка и, следовательно, отводов 2482 держателей 2476 петель может оставаться зафиксированным вдоль продольной ось A, и клин 2490 на передвижном узле 2492 клина может перемещаться в проксимальном направлении к отводам 2482. Например, петли или раскрытые области 2446 могут развертываться при первом приведении в действие (т.е. сдвигании движка 2444 на первое расстояние в дистальном направлении), и петли или раскрытые области 2446 могут отклоняться при втором приведении в действие (т.е. отодвигании клина 2490 в проксимальном направлении). Следует понимать, что второе приведение в действие может выполняться с использованием движка 2444 или исполнительного механизма, независимого от движка 2444, как подробнее описано ниже. Это позволяет достигать отклоненной конфигурации, несмотря на полное развертывание петель, при одновременном обеспечении, по-прежнему, двухэтапного, двухфазного размещения. По существу, даже когда размер развертывания ограничен до размера, меньшего, чем максимальное развертывание, отдельные петли рассекающих элементов 2416 могут по-прежнему, отклоняться друг от друга. Таким образом, дистальный петли рассекающих элементов выполнены с возможностью отклонения в угловом направлении друг от друга, с переводом режущего элемента в третью, отклоненную конфигурацию, независимо от размера увеличенных раскрытых областей.
[0132] Устройство 2440 позволяет пользователю полностью регулировать и выбирать, в какой точке во время выдвижения проволок петли начнут разделяться в угловом направлении друг от друга. Как описано в других местах в настоящей заявке, вторая, развернутая конфигурация рассекающих элементов 2416 может иметь, в общем, овальную форму с максимальной шириной от приблизительно 4,0 мм до приблизительно 20 мм и высотой от приблизительно 1,0 мм до приблизительно 15 мм. В некоторых вариантах осуществления, вторая, развернутая конфигурация рассекающих элементов 2416 может регулируемой вручную пользователем таким образом, что размер раскрытой области 2446, который может достигаться после полного размещения, является меньше максимального размера раскрытой области 2446, когда рассекающий элемент 2416 не ограничен. Вторую, развернутую конфигурацию рассекающих элементов 2416 можно ограничить до намеренно меньшего размера, чем хрусталик 8 в некоторых зонах или вдоль всего профиля. Это может улучшить способность рассекающих элементов 2416 оставаться вплотную к хрусталику 8 и ослабить взаимодействие с капсульным мешком 6. Ограничение размера раскрытой области 2446 рассекающих элементов 2416 до размера, который меньше максимального измерения, допускает также использование рассекающих элементов 2416 в качестве манипуляторов ткани, чтобы захватывать небольшие фрагменты хрусталикового материала и удалять их из капсульного мешка. Это может устранить потребность применения второго устройства удаления.
[0133] Максимальный размер раскрытой области 2446, достижимый рассекающими элементами 2416, при приведении в действие движка 2444 и до отклонения, может регулироваться вручную пользователем. Фиг. 26G-26L изображают механизм регулировки развертывания, включающий в себя регулятор 2470, расположенный на корпусе 2442. В некоторых вариантах осуществления, регулятор 2470 может быть поворотной головкой, кнопкой, переключателем, движком или другим элементом, выполненным с возможностью приведения в действие пользователем. Следует понимать, что применение терминов «головка» или «движок» не предполагает ограничения, и что, в настоящей заявке, возможными считаются любые из множества устройств пользовательского ввода, которые могут приводиться в действие пользователем, чтобы обеспечивать выдвижение и/или отклонение рассекающих элементов 2416. Размер увеличенных раскрытых областей рассекающих элементов до отклонения может быть выбираемым пользователем, например, посредством использования регулятора, выполненного с возможностью изменения относительного расстояния между клином и передвижным узлом. Меньшее относительное расстояние между клином и передвижным узлом может давать, в результате, меньшую раскрытую область рассекающих элементов, при принудительном переводе во вторую развернутую конфигурацию до отклонения, и большее относительное расстояние между клином и передвижным узлом может давать, в результате, большую по величине раскрытую область рассекающих элементов, при принудительном переводе во вторую развернутую конфигурацию до отклонения.
[0134] В варианте исполнения, регулятор 2470 поворотно соединен с проксимальным концом кулачка 2495 таким образом, что поворот регулятора 2470 вынуждает кулачок 2495 поворачиваться. Регулятор 2470 может быть соединен непосредственно с проксимальным концом кулачка 2495 или с установочным штырем 2499, продолжающимся через кулачок 2495 (смотри фиг. 26J). Проксимальный конец кулачка 2495 может включать в себя механизм, который обеспечивает поэтапный поворот с созданием последовательности тактильных или звуковых щелчков, обеспечивающих обратную связь с пользователем, чтобы выполнять некоторую степень поворота. В некоторых вариантах осуществления, механизм может включать в себя множество фиксирующих углублений 2484, расположенных вблизи проксимального конца кулачка 2495 и выполненных с возможностью взаимодействия с пружиной 2486, например, плоской пружиной. Пружина 2486 может иметь конец, выполненный с возможностью изгиба вверх от продольной оси таким образом, что он сдвигается по проксимальному концу вращающегося кулачка 2495, и изгиба вниз для введения внутрь каждого фиксирующего углубления 2484. Пружина 2486 может обеспечивать фиксирующее усилие, когда пользователь поворачивает резьбу. Кулачок 2495 может иметь спиральную канавку 2496 кулачка на внешней поверхности, которая выполнена с возможностью зацепления кулачкового штырька 2497, расположенного на проксимальном конце передвижного узла 2492 клина. Когда регулятор 2470 поворачивают в первом направлении, кулачковый штырек 2497 передвижного узла 2492 клина движется по спиральной канавке 2496 кулачка вокруг кулачка 2495, сдвигая, тем самым, передвижной узел 2492 клина вдоль продольной оси A устройства 2440. Клин 2490 на дистальном конце передвижного узла 2492 клина перемещается в направлении проксимального конца устройства 2440. Когда клин 2490 отодвинут в более проксимальное местоположение вдоль продольной оси A устройства, петли или раскрытые области 2446 рассекающих элементов 2416 будут отклоняться раньше во время хода развертывания. Это означает, что раскрытая область 2446 соответствующих рассекающих элементов 2416 будет меньше во время отклонения. Противоположное перемещение может происходить, когда регулятор 2470 поворачивают во втором, противоположном направлении. Клин 2490 можно выдвинуть в более дистальное местоположение вдоль продольной оси A устройства, так что петли рассекающих элементов 2416 будут отклоняться позднее во время хода развертывания, что дает, в результате, большую по величине раскрытую область 2446 во время отклонения. Передвижной узел 2472 движка может дополнительно включать в себя стопор 2498 развертывания, выполненный с возможностью упора в клин 2490, предотвращая, тем самым, дополнительный относительный сдвиг между передвижным узлом 2472 и клином 2490 (смотри фиг. 26K). Таким образом, положение клина 2490 может, в конечном счете, ограничивать общее достигаемое развертывание ввиду невозможности перемещения за стопор 2498 развертывания.
[0135] Как описано выше, в конструкцию можно включить одну или более отводимых втулок 2415 (смотри фиг. 24E), которые поддерживают рассекающие элементы 2416 в такой ограниченной конфигурации, что они не отклоняются от продольной оси устройства до того, пока пользователь не пожелает, чтобы произошло отклонение. Отводимая втулка 2415 может жестко соединяться с каждым рассекающим элементом 2416, как описано в другом месте настоящей заявки, и способствовать продольному и поворотному движению элементов 2416. Отводимая втулка 2415, таким образом, не допускает, чтобы несколько проволок создавали ненужное растягивание хрусталика во время позиционирования. Отводимую втулку 2415 можно использовать в сочетании с отдельным расширяющим элементом (например, клином 2490), чтобы обеспечивать возможность регулировки степени отклонения, как подробно описано выше. В качестве альтернативы, отводимую втулку 2415 можно использовать в сочетании с множеством рассекающих элементов 2416, которым предварительно придается форма для отклонения, при отодвигании втулки 2415, и освобождаются от ограничивающего усилия. В данном варианте исполнения, в конструкцию не включен ни один отдельный расширяющий элемент (например, клин 2490). Каждый из множества рассекающих элементов 2416 может предварительно формироваться в третью, отклоненную конфигурацию. Во время развертывания петель в направлении ко второй, развернутой конфигурации, втулка 2415 может располагаться в дистально продолженном положении, чтобы удерживать множество рассекающих элементов 2416 ограниченными в направлении к продольной оси A устройства. Затем втулку 2415 можно отвести, чтобы позволить множеству рассекающих элементов 2416 автоматически отклоняться в направлении к ненапряженной отклоненной конфигурации.
[0136] Как описано в других местах в настоящей заявке, рассекающие элементы 2416 могут быть проволокой, имеющей круглое или овальное поперечное сечение. Например, устройство может включать в себя множество рассекающих элементов 2416, сформированных из трех отдельных проволок (например, 0,006-дюймовой (0,15-мм) нитиноловой проволоки). Рассекающие элементы 2416 могут также быть лентой лента или длинным узким листом материала. Например, устройство может включать в себя множество рассекающих элементов 2416, сформированных из узкая полоса 2905 материала (смотри фиг. 33A-33C). В варианте исполнения, показанном на фиг. 33A, дистальная концевая область узкой полосы 2905 может иметь множество сжатых элементов 2910, сформированных в ней, каждый из которых имеет форму для образования режущей петли, когда находится в свободном состоянии, как описано в других местах в настоящей заявке. Проксимальная концевая область узкой полосы 2905 может оставаться в виде единственной узкой полосы материала. В другом варианте исполнения, показанном на фиг. 33B-33C, множество сжатых элементов 2910 может быть сформировано в средней области узкой полосы 2905 таким образом, что как проксимальная концевая область, так и дистальная концевая область являются плоскими, примыкающими узкими полосами материала, перемежаемыми сжатыми элементами 2810, продолжающимися между ними. Узкая полоса материала частично устраняет запутывание отдельных проволок во время перемещений для размещения. Узкая полоса 2905 может быть сформирована из нитинола или другого биосовместимого материала с памятью формы. В варианте исполнения, показанном на фиг. 33A-33C, узкая полоса 2905 имеет два выреза 2915, создающих три сжатых элемента 2910. Узкая полоса 2905 имеет толщину около 0,006 дюймов (0,15 мм) и может быть около 0,022 дюймов (0,56 мм) шириной. Узкая полоса 2905 может быть обработана лазерной резкой для формирования двух вырезов 2915, дающих, в результате, три сжатых элемента 2910. Два выреза 2915 могут равняться приблизительно 0,002 дюймам (0,051 мм), оставляя три сжатых элемента 2910, каждый из которых имеет ширину около 0,006 дюймов (0,15 мм). Затем три сжатых элементы 2910 могут быть электрополированы для удаления углов, с превращением формы сжатых элементов 2910 во множество рассекающих элементов 2416. Резка и электрополировка могут превратить сжатые элементы 2910 с размерами 0,006 дюймов × 0,006 дюймов (0,15×0,15 мм) в 0,006-дюймовые (0,15-мм) рассекающие элементы 2416, которые почти соответствуют нитиноловой проволоке 0,006-дюймового (0,15-мм) диаметра. Следует понимать, что число создаваемых сжатых элементов 2910 может изменяться, как и их размеры, в зависимости от числа рассекающих элементов 2416, требующихся для устройства. Например, ширина узкой полосы 2905 может зависеть от числа рассекающих элементов 2416, подлежащих формированию. В некоторых вариантах осуществления, узкая полоса 2905 может быть превращена в два, три, четыре или более сжатых элементов 2910. Также следует понимать, что ширина и толщина узкой полосы 2905 может, но не обязательно, быть постоянной и может изменяться по их длине.
[0137] Вновь, как показано на фиг. 25A-25C, а также на фиг. 26A-26D, после того, как рассекающие элементы 2416 были выдвинуты во вторую, развернутую конфигурацию (которая, как описано выше, может иметь полностью развернутый максимальный размер раскрытой области или размер, который меньше максимального), повернуты и/или отклонены в третью, отклоненную конфигурацию внутри капсульного мешка 6, в котором рассекающие элементы 2416 охватывают, по меньшей мере, участок хрусталика 8, рассекающие элементы 2416 используются для разрезания хрусталика 8 посредством натяжения передвигаемых концов 2420 рассекающих элементов 2416. Концы 2420 можно отводить по просвету стержня 2412 противоположно тому, как изложено выше, для свертывания рассекающих элементов 2416 из второй, развернутой конфигурации обратно в направлении к первой конфигурации, чтобы сжимать и разрезать хрусталик 8. Когда рассекающие элементы 2416 натягивают, они прилагают направленное внутрь усилие к хрусталику 8 и начинают разрезание и/или фрагментацию хрусталика, благодаря усилию, действующему на хрусталик 8 по небольшой поверхности рассекающих элементов 2416 малого диаметра. Натяжение можно обеспечивать перемещением движка 2444 в проксимальном направлении, натягивая, тем самым, передвигаемые концы каждого рассекающего элемента 2416 в проксимальном направлении и напрягая его. Натяжение может также обеспечиваться, по меньшей мере, частично, пользователем, прилагающим дополнительное усилие, как описано в других местах в настоящей заявке.
[0138] С помощью одной процедуры натяжения, хрусталик 8 можно разделить на два, три или более фрагментов, в зависимости от числа рассекающих элементы 2416, включенных в конструкцию. Процесс можно повторять под другим углом поворота (т.е. 90 градусов, для создания перекрестного расположения относительно первой фрагментации), и развертывание и натяжение выполняются еще раз для фрагментации хрусталика 8 на еще меньшие фрагменты (например, четыре, шесть или более). На фиг. 25C, плоскость рассечения показана как, в основном, вертикальная, но следует понимать, что может существовать любое число углов и ориентаций для траектории разрезания рассекающих элементов 2416. Процесс можно повторять столько раз, сколько необходимо, чтобы создать любое число фрагментов хрусталика любого искомого размера. Окончательный искомый размер фрагментов хрусталика может зависеть от способа извлечения из глаза 1. В некоторых вариантах осуществления можно дополнительно применять факоэмульсификацию в капсульном мешке 6, чтобы удалить фрагменты хрусталика. Это может быть особенно полезно при тяжелых или ядерных формах катаракт, когда полная фрагментация хрусталика увеличивает площадь поверхности и уменьшает размер фрагментов, которые следует эмульгировать методом факоэмульсификации. В других вариантах осуществления, фрагменты хрусталика можно извлекать, как описано в настоящей заявке. В некоторых вариантах осуществления, фрагменты хрусталика можно извлекать, как описано в публикации США № 2018/0318132, под названием «Devices and Methods for Ocular Surgery», опубликованной 8 ноября 2018 г., которая включена в настоящую заявку путем отсылки.
[0139] При проксимальном перемещении движка 2444, передвижной узел может возвращаться в исходное положение для безопасного извлечения рассекающих элементов 2416 из глаза. Рассекающие элементы 2416 можно повернуть обратно в их исходную плоскость введения и затем отвести в стержень 2412. Когда движок 2444 полностью отведен в проксимальном направлении, рассекающие элементы 2416 могут оказаться в чрезмерно деформированном положении, которое, со временем, может нарушить характеристики памяти формы рассекающих элементов 2416. Устройство может включать в себя пружину 2458, которая, когда петли рассекающих элементов 2416 отводят обратно в просвет стержня 2412, не дает отвести петли до такого малого размера, который негативно влияет на память формы нитинола. Например, пружина 2458 (смотри фиг. 24D) может размещаться на проксимально-обращенной передней части 2456 и продолжаться проксимально от передвижного узла 2472 настолько, что движок 2444 и передвижной узел 2472 являются поджатыми в немного более дистальное положение относительно корпуса 2442 после отпускания движка 2444 (смотри фиг. 26A-26B). Если пользователь отводит рассекающие элементы 2416 слишком далеко с помощью движка 2444, то пружина 2458 может поджать передвижной узел 2472 на короткое расстояние в дистальном направлении после того, как движок 2444 отпускается пользователем. Это позволяет петлям рассекающих элементов 2416 немного продолжаться из дистального конца 2405 стержня 2412 и сохранять, в состоянии покоя, раскрытую область 2446, немного увеличенную по сравнению с полностью отведенным состоянием (смотри фиг. 24A). Размер дистального конца 2405 стержня 2412 и немного увеличенных раскрытых областей 2446, расположенных снаружи дистального конца 2405 стержня 2412, может быть достаточно малым для введения через чисто роговичный разрез (т.е. максимальный внешний диаметр является меньше, чем приблизительно 3,5 мм), так что дистальные петли рассекающих элементов 2416 не всегда требуется полностью отводить внутрь просвета стержня 2412 для введения в переднюю камеру глаза.
[0140] Приведение в действие движка может ограничиваться так, что устройство блокируется от использования более, чем для одной медицинской процедуры. Например, в корпус можно встраивать неразмыкаемые защелки, рычаги, храповики, собачки, зубчатые рейки и другие механические элементы для зацепления с движком, предотвращающего выдвижение режущего элемента дистальными перемещениями движка и передвижного узла, прикрепленного к движку. Механизмы счета ходов, описанные в настоящей заявке, могут превращать устройство в устройство однократного использования или устройство ограниченного использования. «Однократное использование» или «ограниченное использование» означает в настоящей заявке, что устройства, описанные в настоящей заявке, предназначены для использования с одним пациентом и не предназначены для повторной стерилизации и использования с другим пациентом. Механизмы счета ходов, описанные в настоящей заявке, могут обеспечивать дешевый способ для ограничения использования устройства, которое можно изготавливать как дешевое одноразовое устройство. Следует понимать, что механизмы счета ходов, выполненные с возможностью слежения за дистальными выдвижениями и/или проксимальными выдвижениями движка, можно применять с устройством, имеющим любое число рассекающих элементов, включая 1, 2, 3 или более рассекающих элементов.
[0141] Даже с устройством однократного использования, целесообразно предусматривать, чтобы движок 2444 (или другой выдвижной/отводящий механизм) приводился в действие для совершения, по меньшей мере, двух возвратно-поступательных ходов. Например, пользователь может пожелать сдвинуть движок 2444 вперед-назад несколько раз, чтобы освоить устройство перед его использованием на пациенте. В некоторых вариантах осуществления, устройство 2440 может включать в себя механизм счета ходов, который допускает несколько приведений в действие или дистальных выдвижений/проксимальных выдвижений движка (или другого устройства ввода, выполненного с возможностью выдвижения и отвода рассекающих элементов 2416) дискретное число раз до блокирования выдвижения движка 2444, передвижного узла 2472 и/или рассекающих элементов 2416. Тем самым, механизм счета ходов может ограничивать пригодность устройства после клинического применения для одного пациента. Механизм счета ходов может следить за дистальными выдвижениями и/или проксимальными выдвижениями движка и вызывать акт блокировки, который препятствует дальнейшим дистальным выдвижениям движка после того, как происходит акт блокировки. Следует понимать, что ограничение на применение термина «движок» не предполагается, и в настоящей заявке предусмотрены устройства ввода других типов, выполненных с возможностью выдвижения/отведения рассекающих элементов 2416.
[0142] В некоторых вариантах осуществления, движок 2444 может быть присоединен к механизму 2701 счета ходов. Фиг. 27A-27C представляют механизм 2701 счета ходов, который может включать в себя счетную храповую систему. Храповик или зубчатое колесо 2705, расположенный(ое) внутри рукоятки 2442, может содержать множество зубьев 2710 в рабочем зацеплении с основным упором 2715 и вспомогательным упором 2720. Основной упор 2715 может быть присоединен к внутренней области корпуса 2442, и вспомогательный упор 2720 может быть присоединен к движку 2444. Во время перемещения движка 2444 вперед (т.е. к дистальному концу корпуса 2442 в направлении стрелки A), зуб 2710 зубчатого колеса 2705 поджимается к основному упору 2715, что вызывает поворот зубчатого колеса 2705 вперед на один зуб 2710 по стрелке B. При заднем ходе, когда движок 2444 перемещается к проксимальному концу корпуса 2442, вспомогательный упор 2720 препятствует отталкиванию зубчатого колеса 2705 в противоположном направлении, когда зубья 2710 сдвигаются обратно по основному упору 2715. Зубчатое колесо 2705 включает в себя также стопорный зуб 2725, выполненный с возможностью застопоривания упором 2730. После того, как зубчатое колесо 2705 продвинулось вперед на некоторое число ходов, которое может быть задано числом зубьев 2710 на зубчатом колесе 2705, стопорный зуб 2725 застопоривается упором 2730, препятствующим дальнейшему повороту зубчатого колеса 2705 в любом направлении (смотри фиг. 27C). Это не дает движку 2444 прийти в дистальный конец его перемещения и, тем самым препятствует полному развертыванию рассекающих элементов 2416. Перемещение рассекающих элементов 2416 предотвращается блокировкой, делающей устройство 2440 непригодным для использования после некоторого числа выдвижений. Число зубьев 2710 может изменяться, включая 2, 3, 4, 5, 6, 7, 8, 9, 10 или более зубьев. После блокировки, движок 2444 все еще может свободно двигаться на проксимальном участке его хода, допуская дальнейшее сжатие дистальной петли и безопасный вывод рассекающих элементов 2416 из глаза. Основной упор 2715 может быть сформирован из листового металлического материала, имеющего форму, которая будет изгибаться вверх, если пользователь попытается преодолеть основной упор 2715 поджимом движка вперед. Аналогично, вспомогательный упор 2720 может быть сформирован из листового металлического материала. В качестве альтернативы, один или оба упора 2715, 2720 могут быть сформированы в виде детали из гибкого формованного пластика, которые могут отклоняться с пути, когда зубчатое колесо 2705 вращается в направлении B, но не будут сходить с пути, когда зубчатое колесо 2705 вращается в противоположном направлении.
[0143] Механизмы счета ходов, описанные в настоящей заявке, могут быть выполнены с возможностью счета числа дистальных выдвижений, проксимальных выдвижений (т.е. отведений) или как дистальных выдвижений, так и проксимальных выдвижений движка. Механизмы счета ходов, описанные в настоящей заявке, могут блокировать дистальные выдвижения после того, как выполнено некоторое число приведений в действие движка. В общем, механизмы счета ходов, описанные в настоящей заявке, не препятствуют проксимальному перемещению движка, так что исключается прихватывание устройства в выдвинутой конфигурации с развернутыми петлями, задержанными снаружи стержня.
[0144] Конфигурация механизма счета ходов может изменяться. Фиг. 28A-28B изображают другой вариант исполнения механизма 2701 счета ходов. Механизм 2701 счета ходов может включать в себя счетную храповую систему. Зубчатое колесо 2705, расположенное внутри рукоятки или корпуса 2442, может иметь множество зубьев 2710 в рабочем зацеплении с основным упором 2715 и вспомогательным упором 2720. В данном варианте исполнения, зубчатое колесо 2705 может быть закреплено к корпусу 2442 устройства таким образом, что оно остается неподвижным вдоль продольной оси устройства во время перемещения движка 2444. Движок 2444 может иметь проксимально продолжающуюся консоль 2735, содержащую основной упор 2715 на ее проксимальном конце. В противоположность варианту исполнения на фиг. 27A-27C, в котором зубчатое колесо 2705 продвигается вперед в течение каждого хода вперед движка 2444, зубчатое колесо 2705 в данном варианте исполнения продвигается вперед на один зуб 2710 в проксимальном конце каждого заднего хода движка 2444 (стрелка A на фиг. 28A). Основной упор 2715 на проксимально продолжающейся консоли 2735 зацепляется с зубом 2710 зубчатого колеса 2705 и поворачивает зубчатое колесо 2705 в обратном направлении на один зуб 2710 (стрелка B на фиг. 28A). Зубчатое колесо 2705 блокируется от поворота в противоположном направлении вследствие наличия вспомогательного упора 2720, зацепляющегося с зубом 2710 на зубчатом колесе 2705. Вспомогательный упор 2720 может располагаться на внутренней поверхности корпуса 2442. После того, как зубчатое колесо 2705 продвинуто вперед в результате дискретного числа ходов, заданных числом зубьев 2710 на зубчатом колесе 2705, стопорный зуб 2740 захватывается основным упором 2715 на консоли 2735, который, в свою очередь, невозможно продвинуть вперед, так как зубчатое колесо 2705 заблокировано от поворота в переднем направлении из-за вспомогательного упора 2720 (смотри фиг. 28B). Это блокирует движок 2444 в крайнем проксимальном положении и рассекающие элементы 2416 в их максимально сжатой форме. Счетная храповая система может иметь любую из множества конфигураций, которые допускают ограниченное число циклов отведения/выдвижения движка перед тем, как происходит механическая блокировка.
[0145] Фиг. 29A-29B изображают другую конфигурацию механизма 2701 счета ходов. Как и в вышеописанных вариантах исполнения, зубчатое колесо 2705 располагается внутри рукоятки и имеет множество зубьев 2710 в рабочем зацеплении с основным упором 2715 и вспомогательным упором 2720. Зубчатое колесо 2705 может быть закреплено к внутренней поверхности корпуса 2442 устройства и выполнено с возможностью поворота вокруг оси, расположенной перпендикулярно продольной оси корпуса 2442, продолжающейся от дистального конца к проксимальному концу. Зубчатое колесо 2705 зафиксировано вдоль продольной оси, так что, когда движок 2444 выдвигается и отводится аксиально вдоль продольной оси корпуса 2442, он зацепляется с зубьями 2710 зубчатого колеса 2705. Движок 2444 может иметь проксимально продолжающуюся консоль 2735, имеющую основной упор 2715 в ее проксимальной концевой области. Основной упор 2715 продолжается из проксимальной концевой области консоли 2735 таким образом, что конец основного упора 2715 обращен к дистальному концу корпуса 2442. Зубья 2710 зубчатого колеса 2705 выступают в сторону к проксимальному концу корпуса 2442. Данное относительное расположение основного упора 2715 и зубьев 2710 допускает, чтобы зубчатое колесо 2705 продвигалось вперед во время каждого хода вперед движка 2444 (т.е. в направлении к дистальному концу корпуса 2442) и оставалось неподвижным во время каждого заднего хода движка 2444 (т.е. в направлении к проксимальному концу корпуса 2442), когда основной упор 2715 проскакивает зубья 2710 зубчатого колеса 2705. Во время перемещения движка 2444 вперед, зуб 2710 зубчатого колеса 2705 поджимается к основному упору 2715, вынуждающему зубчатое колесо 2705 повернуться на один зуб 2710 по стрелке B. При заднем ходе, когда движок 2444 перемещают в направлении к проксимальному концу корпуса 2442, вспомогательный упор 2720 препятствует отталкиванию зубчатого колеса 2705 в противоположном направлении, когда зубья 2710 скользят обратно по основному упору 2715. Зубчатое колесо 2705 может также включать в себя стопорный зуб (подобный зубу 2725 на фиг. 27A-27C), выполненный с возможностью застопоривания упором, как описано в других местах в настоящей заявке.
[0146] Вышеописанные варианты исполнения счетных механизмов предусматривают вращение зубчатого колеса вокруг оси, которая перпендикулярна продольной оси A корпуса 2442. Счетный механизм 2701 может также включать в себя элемент, выполненный с возможностью вращения вокруг продольной оси A корпуса 2442. Фиг. 30A-30D изображают другой вариант исполнения механизма 2701 счета ходов, включающего в себя цилиндрический счетный барабан 3005, расположенный внутри корпуса 2442 таким образом, что центральная ось барабана 3005 выровнена соосно с продольной осью A корпуса 2442. Счетный барабан 3005 может включать в себя множество наклонных кулачков 3010, выступающих вверх из и расположенных радиально по периферии внешней поверхности данного барабана. Нижняя сторона движка 2444 может иметь первую наклонную направляющую 3025 движка и вторую наклонную направляющую 3030 движка (смотри фиг. 30D), выполненные по форме и расположению с возможностью зацепления с наклонными кулачками 3010, соответственно, при отведении и выдвижении движка 2444. Форма каждого наклонного кулачка 3010 и форма наклонных направляющих 3025, 3030 движка могут изменяться, но, обычно, являются ответными друг к другу. Взаимно ответные формы наклонных кулачков 3010 и наклонных направляющих 3025, 3030 движка позволяют наклонным направляющим 3025, 3030 движка упираться в наклонные кулачки 3010 и скользить по ним. Аксиальное перемещение наклонных направляющих 3025, 3030 вдоль продольной оси A приводит к поворотному движению барабана 3005 в направлении по стрелке B вследствие взаимодействия с наклонными кулачками 3010 (смотри фиг. 30A). Каждое дистальное выдвижение движка может повернуть цилиндрический счетный барабан на долю полного оборота барабана, как подробнее описано ниже. Барабан выполнен с возможностью поворота до некоторого числа долей прежде, чем происходит акт блокировки. Акт блокировки может блокировать дистальные выдвижения движка, одновременно допуская проксимальное отведение движка, чтобы исключить фиксацию движка, когда режущий элемент находится в развернутой конфигурации внутри глаза пациента.
[0147] В некоторых вариантах осуществления, наклонные кулачки 3010 могут иметь многоугольную форму с, по меньшей мере, двумя наклонными поверхностями относительно продольной оси барабана 3005, включая передний наклон 3015, выполненный с возможностью зацепления с ответной наклонной поверхностью на первой наклонной направляющей 3025 движка, и задний наклон 3020, выполненный с возможностью зацепления с ответной наклонной поверхностью второй наклонной направляющей 3030 движка. В некоторых вариантах осуществления, передний наклон 3015 обращен к дистальному концу корпуса 2442, и задний наклон 3020 обращен к проксимальному концу корпуса 2442. По существу, первая наклонная направляющая 3025 движка, выполненная с возможностью зацепления с передним наклоном 3015, обращена в сторону проксимального конца корпуса 2442, и вторая наклонная направляющая 3025 движка, выполненная с возможностью зацепления с задним наклоном 3020, обращена в сторону дистального конца корпуса 2442 (смотри фиг. 30B). При заднем ходе (т.е. в сторону к проксимальному концу корпуса 2442), первая наклонная направляющая 3025 движка упирается в передний наклон 3015 первого наклонного кулачка 3010a барабана 3005. Барабан 3005, в свою очередь, вращается вокруг продольной оси A устройства в первом направлении по стрелке B. Барабан 3005 поворачивается на долю полного оборота барабана 3005. После того, как барабан 3005 завершит свою долю поворота, и движок 2444 продолжает перемещаться назад, поворот барабана 3005 блокируется консольной частью 3027 второй наклонной направляющей 3030 движка (смотри фиг. 30E). Консольная часть 3027 располагается между двух из наклонных кулачков 3010a, 3010b на барабане 3005 таким образом, что поворот барабана 3005 блокируется даже в случае, если, например, устройство встряхивают или роняют. Движок 2444 может блокировать поворот барабана 3005, когда наклонные направляющие движка не совмещаются с наклонными кулачками 3010 на барабане 3005. При ходе вперед движка 2444, вторая наклонная направляющая 3030 движка упирается в задний наклон 3020 следующего наклонного кулачка 3010b и поворачивает барабан 3005 вокруг продольной оси A корпуса 2442 на другую долю полного оборота барабана 3005 по стрелке B. Например, барабан 3005 может повернуться на 1/24 от полного оборота, при заднем ходе, и еще на 1/24 от полного оборота, при ходе вперед. Таким образом, в течение каждого цикла переднего и заднего перемещения движка 2444, барабан 3005 может повернуться на 1/12 от полного оборота.
[0148] Число наклонных кулачков 3010 может изменяться в зависимости от того, сколько требуется циклов приведения в действие движка 2444 (например, 3, 4, 5, 6, до приблизительно 19, 20 или более). Движок можно выдвигать дистально, с совершением от приблизительно 3 до приблизительно 30 ходов, прежде, чем происходит акт блокировки, и движок блокируется в заднем положении. Каждый барабан 3005 может дополнительно включать в себя стопорный кулачок 3032 (смотри фиг. 30C). Стопорный кулачок 3032 может располагаться на внешней поверхности барабана 3005 после данного последнего наклонного кулачка 3010. Стопорный кулачок 3032 может иметь передний наклон 3015. Однако, стопорный кулачок 3032 может не иметь заднего наклона 3020. Вместо этого, стопорный кулачок 3032 может содержать канавку 3034, выполненную с возможностью предотвращения поступательного перемещения движка 2444 вперед или в дистальном направлении (смотри фиг. 30C). Стопорный кулачок 3032 может ограничивать число поворотов барабана 3005 некоторым числом. Стопорный кулачок 3032 может располагаться так, что он зацепляется с наклонными направляющими движка, когда движок 2444 перемещается вперед, или когда движок 2444 перемещается назад.
[0149] Положение движка 2444, когда он зацепляется со стопорным кулачком 3032, может быть в любом месте вдоль его диапазона движения. Например, движок 2444 может зацепляться со стопорным кулачком 3032, когда движок 2444 находится в крайнем переднем положении, крайнем заднем положении или в любой точке между данными двумя. В некоторых вариантах осуществления, движок 2444 зацепляется со стопорным кулачком 3032, приблизительно, в середине пути в диапазоне движения, при ходе вперед. Данная конфигурация дает несколько потенциальных преимуществ, связанных с формой рассекающего элемента 2416 спереди устройства. Например, рассекающий элемент 2416 можно перевести в его наименьшую конфигурацию, даже если механизм счета ходов достиг своего предела, и произошел акт блокировки. Это полезно потому, что устройство всегда можно вывести из глаза через роговичный разрез полным отведением движка.
[0150] В некоторых вариантах осуществления, счетный барабан 3005 включает в себя множество наклонных кулачков 3010 внутри внутреннего прохода 3035 (показанного на фиг. 31C и 31E). Множество наклонных кулачков 3010 может располагаться радиально по внутренней поверхности внутреннего прохода 3035. Как в случае с вышеописанным вариантом исполнения, каждый наклонный кулачок 3010 может иметь передний наклон 3015 и задний наклон 3020, выполненные с возможностью размещения в рабочем зацеплении с первой наклонной направляющей 3025 движка и второй наклонной направляющей 3030 движка, при отведении и выдвижении движка 2444. В данном варианте исполнения, проксимальная концевая область движка 2444 может продолжаться через внутренний проход 3035 счетного барабана 3005 таким образом, что наклонные направляющие 3025, 3030 движка могут приходить в зацепление с наклонными кулачками 3010. Внешняя поверхность барабана 3005 может содержать спиральную резьбу 3040 (заметную на фиг. 31B), выполненную с возможностью зацепления с соответствующей охватывающей резьбой на внутренней поверхности корпуса 2442. Когда барабан 3005 поворачивается, барабан 3005 завинчивается по длине корпуса 2442 в аксиальном направлении. В конечном счете, барабан 3005 достигает жесткого стопора, который блокирует перемещение барабана 3005 дальше в аксиальном направлении, и устройство блокируется. Таким образом, барабан 3005 может совершить несколько оборотов прежде, чем происходит акт блокировки, и он достигает жесткого стопора. Жесткий стопор может включать в себя оконечность охватывающей резьбы на внутренней поверхности корпуса 2442. Спиральная резьба 3040 может ограничивать число поворотов барабана 3005 некоторым числом, например, 2,5 оборотами хода. Барабан 3005 может повернуться на 2,5 оборотов, из расчета 12 ходов/оборот или, в сумме, 30 ходов, перед упором в жесткий стопор. На жестком стопоре, движок 2444 может захватываться на задней части длины перемещения, и устройство блокируется от повторного использования.
[0151] В некоторых вариантах осуществления, устройство может включать в себя механизм для обеспечения предупреждения перед тем, как происходит блокировка приведения в действие (смотри фиг. 31F). Элемент сигнализации блокировки может быть механическим, например, окном 3042, продолжающимся сквозь корпус 2442, обеспечивающим визуальный показатель или индикацию положения барабана 3005 внутри корпуса 2442, например, относительно жесткого стопора. Окно 3042 может располагаться вблизи места, где пользователь может легко видеть его во время использования (например, на верхней части устройства, вблизи места, где пользователь может удерживать устройство). Окно 3042 позволяет пользователю видеть контрастный цвет, когда указательный барабан 3005 поступательно перемещается назад. Когда барабан 3005 располагается вблизи окна 3042 корпуса 2442, цвет барабана 3005 может быть заметным через окно 3042, обеспечивая индикацию числа дистальных выдвижений, еще возможных до того, как произойдет акт блокировки. Например, внешняя поверхность барабана 3005 может быть заметной через окно 3042 во время использования. Когда барабан 3005 находится в более дистальном положении внутри корпуса 2442, и еще можно выполнить совсем немного ходов, барабан 3005 может располагаться дистально от окна 3042 таким образом, что он не виден через окно 3042, и окно 3042 выглядит темным или имеет первый цвет. Барабан 3005 может оставаться дистально от окна 3042 в течение ряда ходов, пока барабан 3005 не достигает стопора (например, стопорного кулачка 3032 или другого стопора, как описано в других местах в настоящей заявке). На данной стадии, когда можно выполнить немного больше ходов, внешнюю поверхность барабана 3005 может видеть через окно 3042. Цвет внешней поверхности барабана 3005 может быть легко опознаваемым через окно 3042. Барабан 3005 может иметь особый цвет, который является легко опознаваемым по сравнению с цветом рукоятки 2442 (например, оранжевым или красным, когда рукоятка 2442 является белой или серой) и сигнализирует пользователю о положении барабана 3005 перед тем, как происходит блокировка. В качестве альтернативы, внешняя поверхность барабана 3005 может быть заметной через окно 3042 до и во время использования. Внешняя поверхность барабана 3005 может иметь, по меньшей мере, два контрастных цвета, которые извещают пользователя, где находится барабан 3005 в ходе его перемещения. Например, проксимальную концевую область барабана 3005 можно видеть через окно 3042 перед использованием. Внешняя поверхность проксимальной концевой области барабана 3005 может иметь первый цвет (например, черный или синий). С каждым циклом перемещения движка 2444, барабан 3005 принудительно сдвигается в проксимальном направлении внутри корпуса 2442, пока дистальная концевая область внешней поверхности барабана 3005 не становится заметной через окно 3042. Внешняя поверхность дистальной концевой области барабана 3005 может иметь другой цвет (например, оранжевый или красный). Таким образом, когда барабан 3005 достигает стопора внутри корпуса 2442, то через окно 3042 можно видеть другой цвет, предупреждающий пользователя, что барабан 3005 находится близко к концу срока его службы.
[0152] В некоторых вариантах осуществления, барабан 3005 содержит последовательность меток 3007 на его внешней поверхности. Например, фиг. 30A-30E показывают, что барабан 3005 содержит числа «1» - «20», маркированные на внешней поверхности. Метки 3007 могут располагаться в линию с окном 3042 в верхней части корпуса таким образом, что метки 3007 на барабане 3005, совмещенные с окном 3042, видны пользователю. Метки 3007 могут быть числами, соответствующими числу остающихся циклов, числу выполненных циклов и т.д., так что пользователь получает сведения о состоянии механизма счета ходов. Кроме того, движок 2444 может также иметь окно 3009 вдоль его длины (смотри фиг. 30D). Окно 3009 движка 2444 может располагаться в линию с окном 3042 сквозь верхнюю часть корпуса 2442 таким образом, что метка(и) 3007 на барабане 3005 в конкретном положении движка 2444 совмещается(ются) с окнами 3009, 3042 и видны пользователю. Например, когда движок 2444 полностью продвигается дистально вперед, и рассекающий элемент 2416 устройства полностью раскрывается, то окно 3009 движка 2444 может располагаться в линию с окном 3042 верхней части корпуса, так что пользователь может видеть соответствующее число в этот момент времени. Когда движок 2444 отводят проксимально, окно 3009 движка 2444 перемещается, и движок 2444 блокирует наблюдение меток 3007 на барабане 3005 через верхнюю часть корпуса 2442. Таким образом, движок 2444 может выполнять функцию затвора, который открывается только в заданном положении движка. В некоторых вариантах осуществления устройства, это может быть полезно для предотвращения неправильного обращения пользователей с барабаном 3005 или попыток повернуть его назад, чтобы «сбросить» механизм 2701 счета ходов. Такой механизм затвора можно встроить в любой из вариантов исполнения, описанных в настоящей заявке, и предполагается, что возможно любое число других конструкций затворов.
[0153] В еще одних, дополнительных вариантах исполнения, счетный механизм 2701 не обязательно использует вращение барабана или зубчатого колеса подобно тому, как в вышеописанных вариантах исполнения, и может использовать, вместо этого, линейные исполнительные механизмы. Фиг. 32A-32B изображают вариант исполнения счетного механизма 2701, который включает в себя аксиально сдвигающуюся зубчатую рейку 3050. Зубчатая рейка 3050 может включать в себя множество зубьев 2710, выполненных с возможностью зацепления с соответствующим элементом, например, кулачковыми выступами 3052 на проксимально продолжающейся консоли 2735 движка 2444. Проксимально продолжающаяся консоль 2735 выполнена так, что она обычно не контактирует с зубчатой рейкой 3050 в течение большей части ее хода. Как лучше всего показано на фиг. 32A, проксимально продолжающаяся консоль 2735 в ненапряженном, прямолинейном положении может быть совмещена с продольной осью A. Когда движок 2444 отводят проксимально, проксимально продолжающаяся консоль 2735 может отгибаться от продольной оси A в направлении вниз от зубьев 2710 зубчатой рейки 3050. Когда движок 2444 выдвигается дистально, проксимально продолжающаяся консоль 2735 может разжиматься обратно к продольной оси A в направлении вверх к зубьям 2710 зубчатой рейки 3050. Один или более кулачковых выступов 3052 на крайнем проксимальном конце консоли 2735 выполнены с возможностью зацепления с одним или более кулачковыми профилями 3054 на внутренней поверхности корпуса 2442, когда движок 2444 перемещают проксимально и дистально. Когда движок 2444 отводят проксимально, кулачковые выступы 3052 на проксимально продолжающейся консоли 2735 входят в зацепление с кулачковым профилем 3054 на корпусе 2442 и вызывают поджим проксимально продолжающейся консоли 2735 вниз (смотри стрелку A на фиг. 32A). Проксимально продолжающаяся консоль 2735 упруго отгибается вниз относительно движка 2444 и корпуса 2442. После того, как кулачковые выступы 3054 сдвигаются проксимально по кулачковому профилю 3054, проксимально продолжающаяся консоль 2735 может вернуться вверх обратно в ее ненапряженное, прямолинейное положение, совмещенное с продольной осью A. Когда движок 2444 выдвигается дистально, например, чтобы еще раз выдвинуть рассекающий элемент, кулачковые выступы 3052 входят в зацепление с кулачковым профилем 3054 на корпусе 2442. Проксимально продолжающаяся консоль 2735 поджимается вверх и отгибается к зубчатой рейке 3050 от продольной оси A. Элемент 3056 на движке 2444 входит в зацепление с зубьями 2710 на зубчатой рейке 3050, вызывая продвижение зубчатой рейки 3050 вперед вместе с движком 2444 в то время, когда проксимально продолжающаяся консоль 2735 отогнута вверх. После того, как кулачковые выступы 3052 продвигаются дистально за кулачковый профиль 3054, проксимально продолжающаяся консоль 2735 разжимается вниз от зубьев 2710 и в ее нейтральное ненапряженное состояние, совмещенное с продольной осью A. С каждым циклом перемещения движка 2444 вперед-назад, кулачковые выступы 3052 перемещаются по кулачковым профилям 3054, и зубчатая рейка 3050 продвигается вперед на заданное расстояние. Во время проксимального перемещения движка 2444, кулачковые выступы 3052 опускаются ниже кулачкового профиля 3054, и элемент 3056 отходит от зубьев 2710 зубчатой рейки 3050. Во время дистального перемещения движка 2444, выступы 3052 поднимаются обратно, выше кулачкового профиля 3054, и элемент 3056 поджимается к зубьям 2710 зубчатой рейки 3050, вызывая, тем самым, перемещение зубчатой рейки 3050 на некоторое расстояние вперед. Зубчатая рейка 3050 выполнена с возможностью, после заданного числа циклов, входа в зацепление с жестким стопором на корпусе таким образом, что ее невозможно продвинуть дальше вперед. В данном состоянии, движок 2444 заблокирован от перемещения вперед.
[0154] Устройства и способы могут быть описаны в связи с предпочтительными вариантами осуществления, и понятно, что можно выполнять многочисленные модификации предпочтительных вариантов осуществления. Например, манипуляторы тканью могут содержать дополнительные нити поперечные нити, без отступления от многочисленных описанных аспектов.
[0155] В различных осуществлениях, описание приведено со ссылкой на фигуры. Однако некоторые варианты исполнения можно практически применить без одной или более приведенных конкретных деталей или в сочетании с другими известными способами и конфигурациями. В описании изложены многочисленные конкретные детали, например, конкретные конфигурации, размеры и процессы, чтобы обеспечить исчерпывающее понимание вариантов исполнения. В других примерах, общеизвестные процессы и способы изготовления не описаны конкретно и подробно, чтобы не запутывать описание без необходимости. Ссылка в настоящем описании на «один вариант осуществления», «вариант осуществления», «один вариант исполнения», «вариант исполнения» или подобная ссылка, означает, что конкретный(ая) описанные(ая) признак, конструкция, конфигурация или характеристика содержится в, по меньшей мере, одном варианте осуществления или варианте исполнения. Таким образом, выражение «один вариант осуществления», «вариант осуществления», «один вариант исполнения», «вариант исполнения» или подобное выражение, в различных местах в настоящем описании, не обязательно относится к одному и тому же варианту осуществления или варианту исполнения. Кроме того, конкретные признаки, конструкции, конфигурации или характеристики можно объединять любым подходящим способом в одном или более вариантов исполнения.
[0156] Применение относительных терминов в описании может обозначать относительное положение или направление. Например, определение «дистальный» может означать первое направление от точки начала отсчета. Аналогично, определение «проксимальный» может означать местоположение во втором направлении, противоположном первому направлению. Однако, такие термины приведены для установления относительных систем координат и не предназначены для ограничения применения или ориентации закрепленной системы подачи конкретной конфигурацией, описанной в различных вариантах исполнения.
[0157] Хотя настоящее описание содержит много конкретных деталей, их можно интерпретировать не в смысле ограничений объема изобретения, который заявлен, или который может быть заявлен, но только в смысле описаний признаков, характеризующих конкретные варианты осуществления. Некоторые признаки, которые приведены в настоящем описании в контексте отдельных вариантов осуществления, можно также реализовать в комбинации в одном варианте осуществления. И наоборот, различные признаки, которые описаны в контексте одного варианта осуществления, можно также реализовать в нескольких вариантах осуществления по-отдельности или в любой подходящей субкомбинации. Более того, хотя признаки могут быть описаны выше как действующие в некоторых комбинациях и даже первоначально заявлены как таковые, один или более признаков из заявленной комбинации можно, в некоторых случаях, исключить из комбинации, и заявленная комбинация может быть превращена в субкомбинацию или вариант субкомбинации. Аналогично, хотя операции изображены на чертежах в конкретном порядке, это не следует понимать как требование, чтобы, для достижения искомых результатов, такие операции выполнялись в конкретном показанном порядке или в последовательном порядке, или чтобы выполнялись все изображенные операции. Раскрыто только несколько примеров и вариантов исполнения. На основании приведенного раскрытия можно создавать варианты, модификации и усовершенствования описанных примеров и вариантов исполнения и создавать другие варианты исполнения.
[0158] В вышеприведенных описаниях и в формуле изобретения могут встречаться такие выражения, «по меньшей мере, один из» или «один или более из», за которыми следует соединительный перечень элементов или признаков. Выражение «и/или» также может встречаться в перечне из двух или более элементов или признаков. Если иное не опровергается косвенно или прямо контекстом, в котором применено упомянутое выражение, то такое выражение предусматривает обозначение любого из перечисленных элементов или признаков по-отдельности или любого из перечисленных элементов или признаков в комбинации с любым из других перечисленных элементов или признаков. Например, выражения «по меньшей мере, один из A и B», «один или более из A и B»; и «A и/или B» предполагают, каждое, значение «один A, один B или совместно A и B». Аналогичная интерпретация предусмотрена также для перечней, включающих три или более объектов. Например, выражения «по меньшей мере, один из A, B и C», «один или более из A, B и C»; и «A, B и/или C» предполагают, каждое, значение «один A, один B, один C, совместно A и B, совместно A и C, совместно B и C или совместно A и B, и C».
[0159] Применение выражения «на основании» выше в описании и формуле изобретения предполагает значение «на основании, по меньшей мере, частично», так что неуказанный признак или элемент также допускается.
Реферат
Изобретение относится к медицине. Хирургическое устройство для разрезания хрусталика внутри капсульного мешка глаза содержит: стержень, продолжающийся от корпуса вдоль продольной оси устройства, причем стержень имеет просвет и дистальный конец; режущий элемент, перемещаемый по просвету стержня, причем режущий элемент содержит по меньшей мере первый рассекающий элемент, имеющий первый конец, второй конец и дистальную петлю, сформированную между первым и вторым концами; движок, имеющий рабочее соединение с режущим элементом и передвигаемый вдоль продольной оси корпуса; и механизм счета ходов, соединенный с движком и заключенный внутри корпуса. Режущий элемент выполнен с возможностью перехода из первой, отведенной, конфигурации в направлении ко второй, развернутой, конфигурации при дистальном выдвижении движка. При нахождении во второй развернутой конфигурации дистальная петля по меньшей мере первого рассекающего элемента образует увеличенную раскрытую область, расположенную снаружи дистального конца стержня, причем увеличенная раскрытая область имеет первую сторону, выдвинутую дистально относительно дистального конца стержня, и вторую сторону, расположенную проксимально относительно дистального конца стержня. Механизм счета ходов выполнен с возможностью слежения за дистальными выдвижениями и/или проксимальными выдвижениями движка и вызова акта блокировки, которая препятствует дистальному выдвижению движка. Применение данного изобретения позволит извлекать ткань из передней камеры без повреждения других структур глаза. 14 з.п. ф-лы, 33 ил.

Комментарии