Предохранительное устройство технологической машины - RU2501649C2
Код документа: RU2501649C2
Чертежи
Описание
Область техники, к которой относится изобретение
Изобретение относится к предохранительному устройству технологической машины, охарактеризованному в ограничительной части пункта 1 формулы изобретения.
Уровень техники
Известен блок распознавания для распознавания рабочей ситуации у технологической машины.
Раскрытие изобретения
Объектом изобретения является предохранительное устройство технологической машины, содержащее блок распознавания, предусмотренный для распознавания рабочей ситуации у технологической машины.
В соответствии с изобретением блок распознавания включает в себя блок регистрации изображений, предназначенный для контроля первой зоны обеспечения безопасности, и сенсорный (чувствительный) блок, отличный от блока регистрации изображений и предназначенный для контроля второй зоны обеспечения безопасности. Этим достигается особенно высокая надежность распознавания рабочей ситуации у технологической машины, прежде всего высокая надежность обнаружения части человеческого тела, присутствующей в зоне обеспечения безопасности. Под "блоком регистрации изображений" следует понимать, в частности, съемочное устройство для получения изображений, прежде всего изображений, поддающихся анализу посредством программы обработки изображений. При этом целесообразно, чтобы блок регистрации изображений был функционально связан с блоком обработки изображений, предусмотренным для обработки изображений зарегистрированных блоком регистрации изображений. Блок регистрации изображений может быть выполнен, например, в виде видеокамеры. Особенно целесообразен вариант, в котором блок регистрации изображений предусмотрен для получения изображений в видимой области спектра. Сенсорный блок и блок регистрации изображений в предпочтительном варианте имеют различные частоту регистрации и видеочастоту (или частоту кадров). Особенно предпочтителен вариант, в котором сенсорный блок имеет более высокую частоту регистрации, чем блок регистрации изображений.
В предлагаемом предохранительном устройстве сенсорный блок имеет по меньшей мере один диапазон чувствительности для регистрации излучения в инфракрасной области спектра, чем достигаются высокая частота регистрации сенсорного блока и, соответственно, малое время реакции (отклика) при выполнении процесса распознавания. В частности, указанный диапазон чувствительности предлагается предусмотреть для регистрации излучения в тепловой инфракрасной области спектра. В этой связи под "тепловой" инфракрасной областью спектра следует понимать, в частности, интервал длин волн в инфракрасной области спектра, расположенный выше длины волны 8 мкм и предпочтительно ниже длины волны 15 мкм. В частности, тепловая инфракрасная область спектра находится в средне- и длинноволновой области (IR-C) инфракрасного излучения. При этом блок распознавания целесообразно настроить на распознавание того или иного объекта/события за счет проведения различия между видами материалов, основанного на регистрации температурного параметра. В частности, выбрав определенный диапазон чувствительности, можно настроить сенсорный блок на обнаружение человеческой ткани во второй зоне обеспечения безопасности.
Первая зона обеспечения безопасности и вторая зона обеспечения безопасности могут совпадать друг с другом, будучи идентичными. Предпочтительно же, чтобы блок регистрации изображений и сенсорный блок были предусмотрены ("предусмотрен" в контексте изобретения следует понимать в смысле "выполнен и/или расположен") для контроля различных зон обеспечения безопасности. Например, зоны обеспечения безопасности могут быть отделены друг от друга или могут примыкать друг к другу. Эффективного взаимодействия блока регистрации изображений и сенсорного блока при распознавании рабочей ситуации можно добиться, если зоны обеспечения безопасности перекрываются. В частности, особенно эффективная взаимодополняемость может быть достигнута, если первая зона обеспечения безопасности охватывает вторую зону обеспечения безопасности.
Далее согласно изобретению вторая зона обеспечения безопасности соответствует зоне рабочего инструмента, чем достигается высокая степень безопасности работы с технологической машиной. В этой связи особенно выгоден вариант, в котором сенсорный блок имеет более высокую частоту регистрации, чем блок регистрации изображений, чем достигается особенно малое время реакции при распознавании вида материала в зоне рабочего инструмента. В этой связи под "зоной рабочего инструмента" следует понимать, в частности, область, состоящую из точек, наименьшее расстояние от которых до рабочего инструмента технологической машины и/или до зоны пути перемещения рабочего инструмента технологической машины составляет не более 10 см, желательно не более 5 см и предпочтительно не более 2 см. При этом область, называемая "зоной пути перемещения рабочего инструмента", состоит, в частности, из точек, в которых потенциально может оказаться рабочий инструмент технологической машины, например ввиду подвижности узла крепления, обеспечивающего установку рабочего инструмента, относительно рабочей поверхности технологической машины, например в случае торцовочно-усорезной пилы, панельной пилы, пильного станка с протягиваемым пильным агрегатом (с нижней тягой) и т.д. Блок регистрации изображений обладает полем зрения, которое во время работы задает контролируемую зону технологической машины. Предпочтительно, чтобы эта контролируемая зона включала в себя по меньшей мере один отдельный участок зоны рабочего инструмента. Также предпочтительно, чтобы вертикальная (т.е. наблюдаемая при взгляде в вертикальном направлении) проекция контролируемой зоны на рабочую поверхность включала в себя (охватывала) вертикальную проекцию зоны рабочего инструмента на рабочую поверхность технологической машины. Кроме того, контролируемая зона может включать в себя по меньшей мере один отдельный участок зоны пути перемещения рабочего инструмента.
Особенно быстрое распознавание может быть обеспечено в случае, если блок распознавания включает в себя блок анализа, предусмотренный для осуществляемого на основании данных изображений (видеоданных), полученных блоком регистрации изображений, анализа по меньшей мере одного признака из группы следующих признаков: цвет, контур и текстура. Особенно предпочтительно предусмотреть блок анализа для распознавания рабочей ситуации посредством сравнения полученных данных изображений с заранее сохраненными данными образцовых изображений.
Кроме того, блок распознавания может включать в себя блок анализа, предусмотренный для определения траектории движения объекта, перемещающегося в зоне обеспечения безопасности. Этим может достигаться высокая скорость распознавания потенциала опасности при работе технологической машины. Особенно предпочтительным является вариант осуществления изобретения, в котором блок анализа предусмотрен для того, чтобы экстраполировать траекторию движения объекта на его будущее положение относительно рабочего инструмента технологической машины. Определение траектории движения предпочтительно осуществлять на основании данных изображений, полученных блоком регистрации изображений.
В предпочтительном усовершенствованном варианте осуществления изобретения предлагается включить в состав блока распознавания блок анализа, предусмотренный для определения степени быстроты движения объекта, перемещающегося в зоне обеспечения безопасности. В этой связи высокой гибкости применения технологической машины можно достичь, если устройство контроля работы рабочего инструмента имеет по меньшей мере два режима обеспечения безопасности, каждый из которых соответствует одной степени быстроты движения объекта. Определение степени быстроты движения объекта предпочтительно осуществлять на основании данных изображений, получаемых блоком регистрации изображений.
В предпочтительном варианте осуществления изобретения предохранительное устройство технологической машины содержит блок управления, который ставит условием приведения в действие исполнительного органа с целью осуществления меры безопасности выполнение процесса распознавания с помощью блока регистрации изображений и выполнение процесса распознавания с помощью сенсорного блока. Это позволяет достичь высокой надежности работы устройства и исключить ошибочные срабатывания исполнительного органа. При этом блок управления ставит условием приведения в действие исполнительного органа, в частности выработку сигнала распознавания, инициируемую блоком регистрации изображений, и выработку сигнала распознавания, инициируемую сенсорным блоком, в соответствующие моменты времени перед приведением в действие исполнительного органа.
Кроме того, предохранительное устройство технологической машины может включать в себя блок управления, который по меньшей мере в одном режиме работы предусмотрен для приведения в действие исполнительного органа с целью осуществления меры безопасности в зависимости от выданного посредством сенсорного блока сигнала распознавания, что позволяет обеспечить быстрое распознавание. При этом блок регистрации изображений может использоваться при работе предохранительного устройства технологической машины в режиме выдачи предупреждений.
В этой связи высокая степень безопасности и высокий уровень удобства управления достигаются в случае, если предохранительное устройство технологической машины содержит средство, которое при нахождении блока управления в режиме запрещения предусмотрено для блокировки приведения в действие исполнительного органа. При этом в данном случае под приведением в действие исполнительного органа следует понимать, в частности, приведение его в действие по сигналу распознавания, выдача которого инициирована сенсорным блоком, причем в режиме запрещения возможно приведение в действие исполнительного органа по сигналу распознавания (регистрации), выдача которого инициирована блоком регистрации изображений.
Далее, вышеупомянутое средство может быть предусмотрено, при нахождении блока управления в режиме разрешения, для снятия указанной блокировки в зависимости от сигнала распознавания, выданного посредством блока регистрации изображений, чем достигается взаимодополняемость сенсорного блока и блока регистрации изображений. В частности, снятие или отмена режима запрещения может осуществляться на основании определенной траектории движения объекта в первой зоне обеспечения безопасности.
В еще одном варианте осуществления изобретения предохранительное устройство технологической машины содержит блок управления, имеющий режим калибровки для калибровки блока распознавания, что позволяет повысить точность и надежность работы блока распознавания.
Краткое описание чертежей
Другие преимущества изобретения раскрыты в приведенном ниже описании осуществления изобретения, поясняемом чертежами. На чертежах в качестве примера представлен вариант осуществления изобретения. Чертежи, описание и формула изобретения содержат многочисленные признаки в определенной комбинации. Специалист, исходя из целесообразности, также будет рассматривать эти признаки в отдельности и объединять их в другие рациональные комбинации. На чертежах показано:
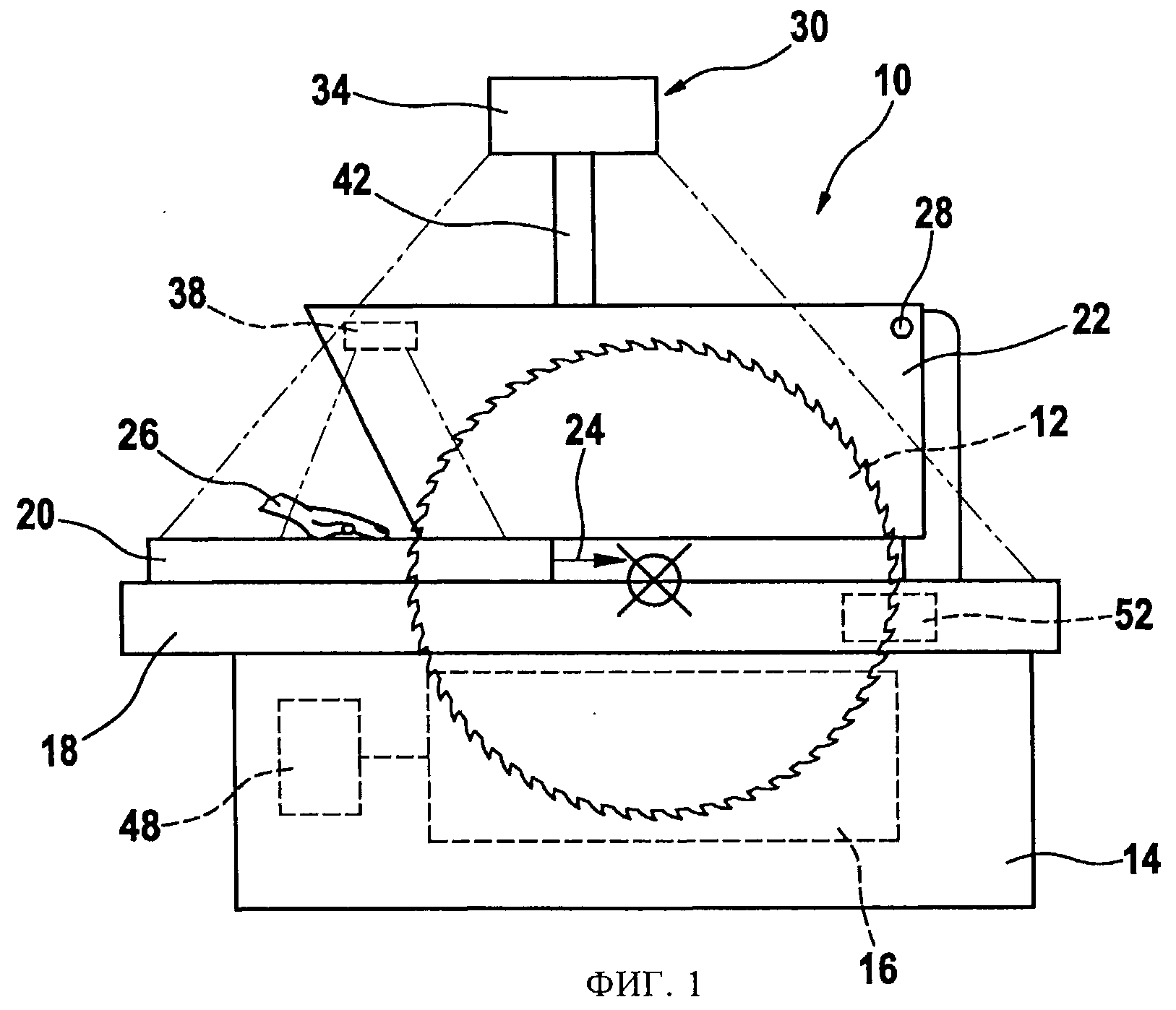
на фиг.1 - вид сбоку настольной циркулярной пилы с блоком распознавания,
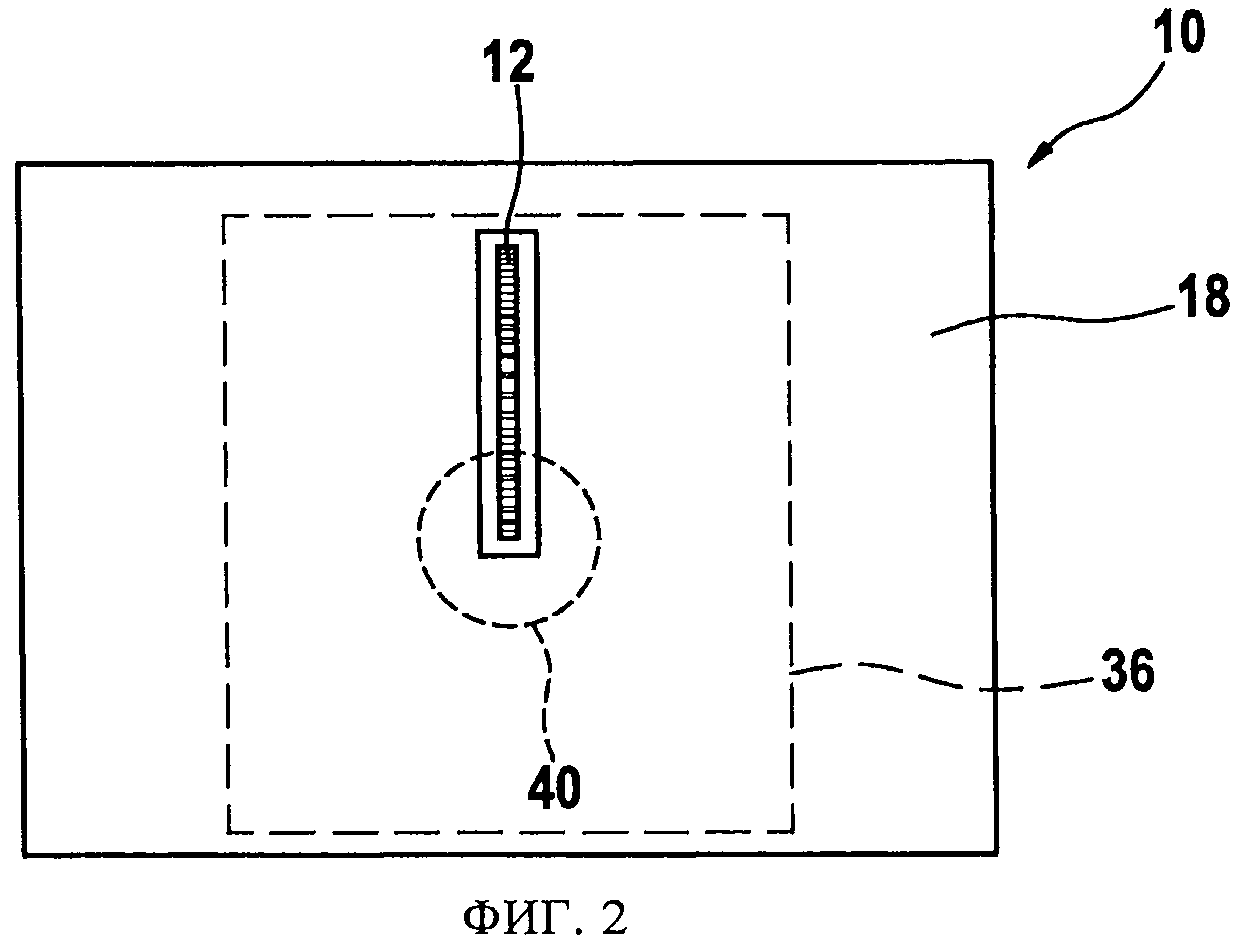
на фиг.2 - изображенная в плане при виде сверху настольная циркулярная пила, блок распознавания которой имеет две зоны обеспечения безопасности,
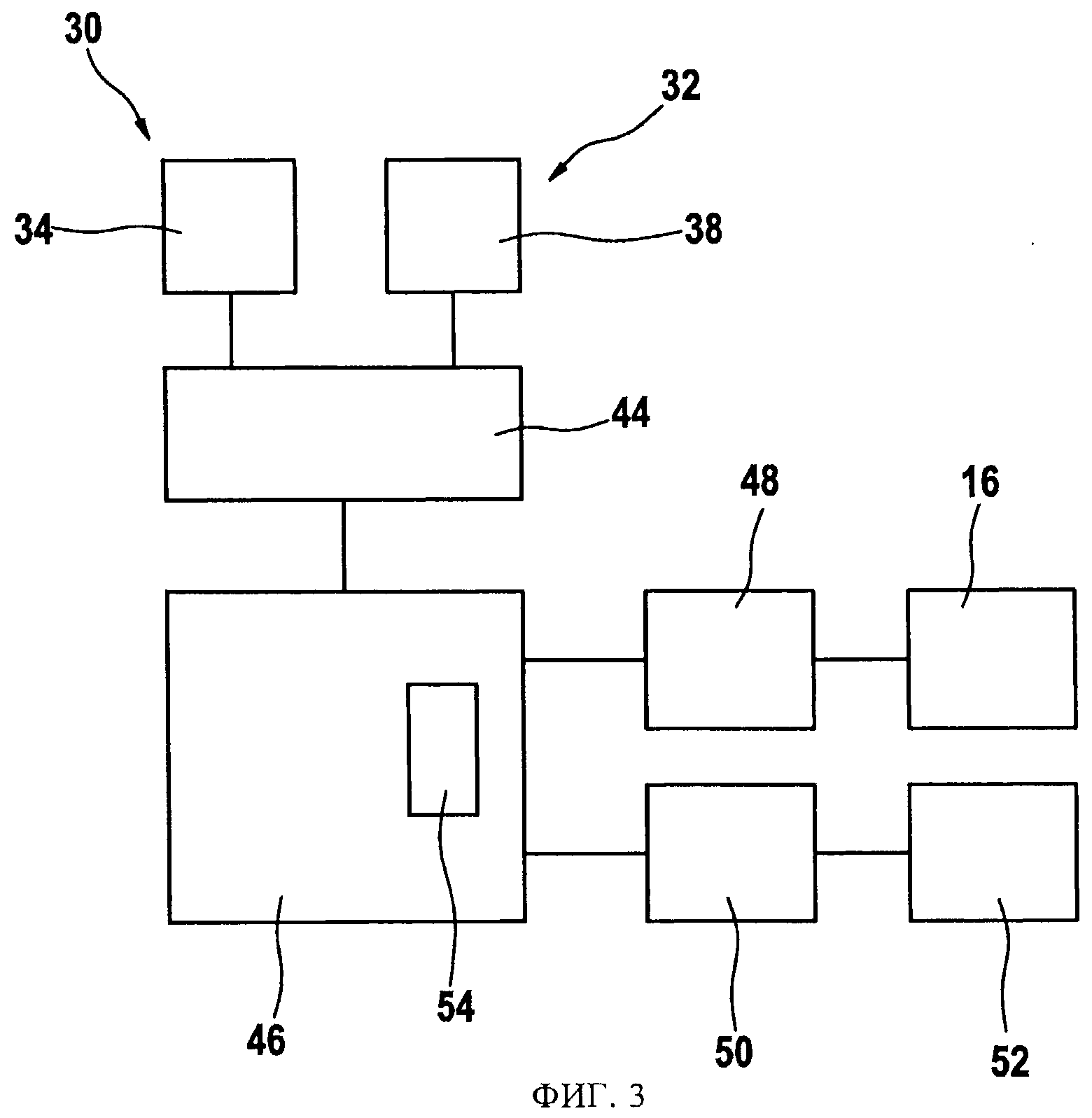
на фиг.3 - схематическое изображение блока распознавания и исполнительных органов технологической машины,
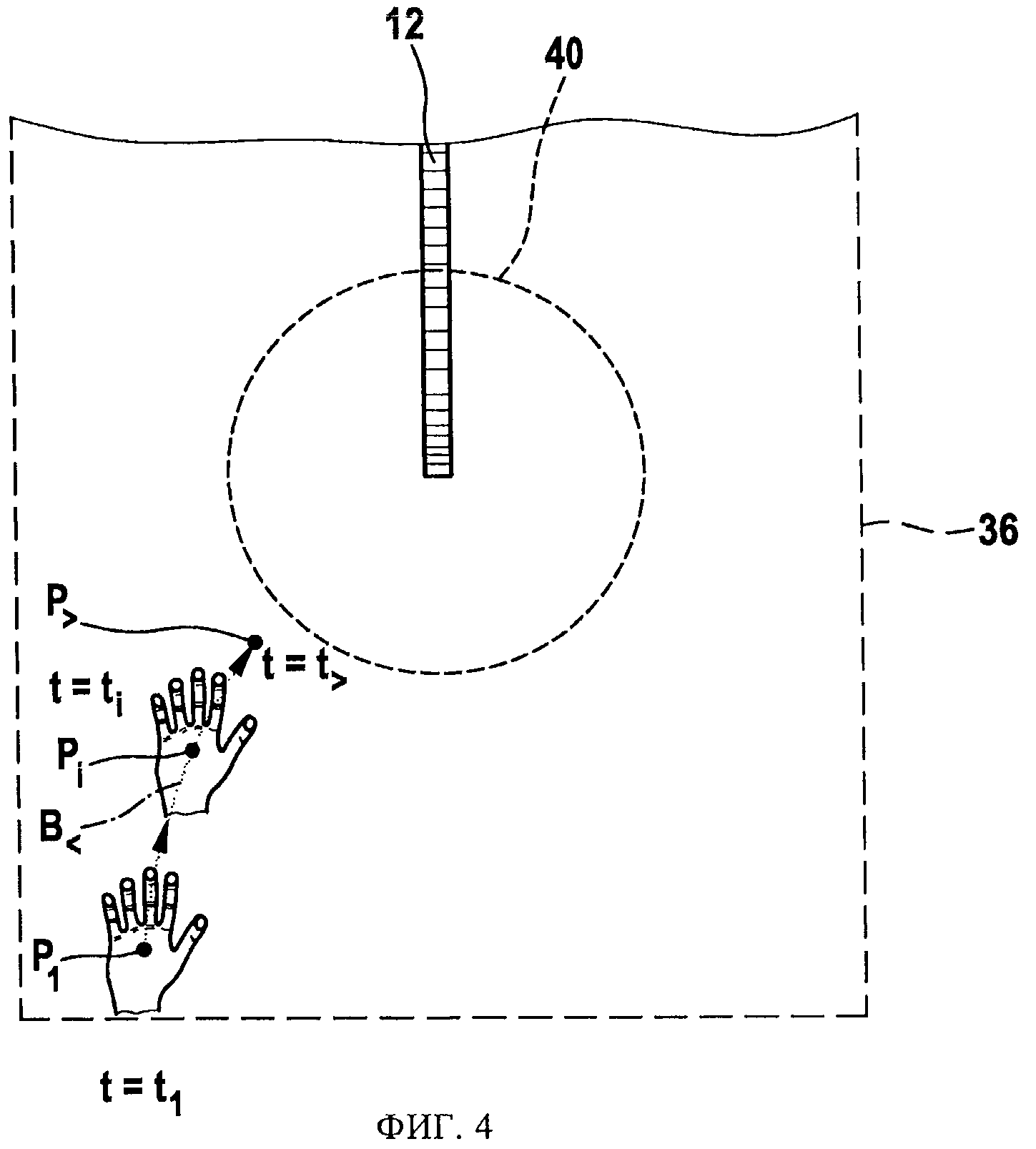
на фиг.4 - определение траектории движения руки в первой зоне обеспечения безопасности и
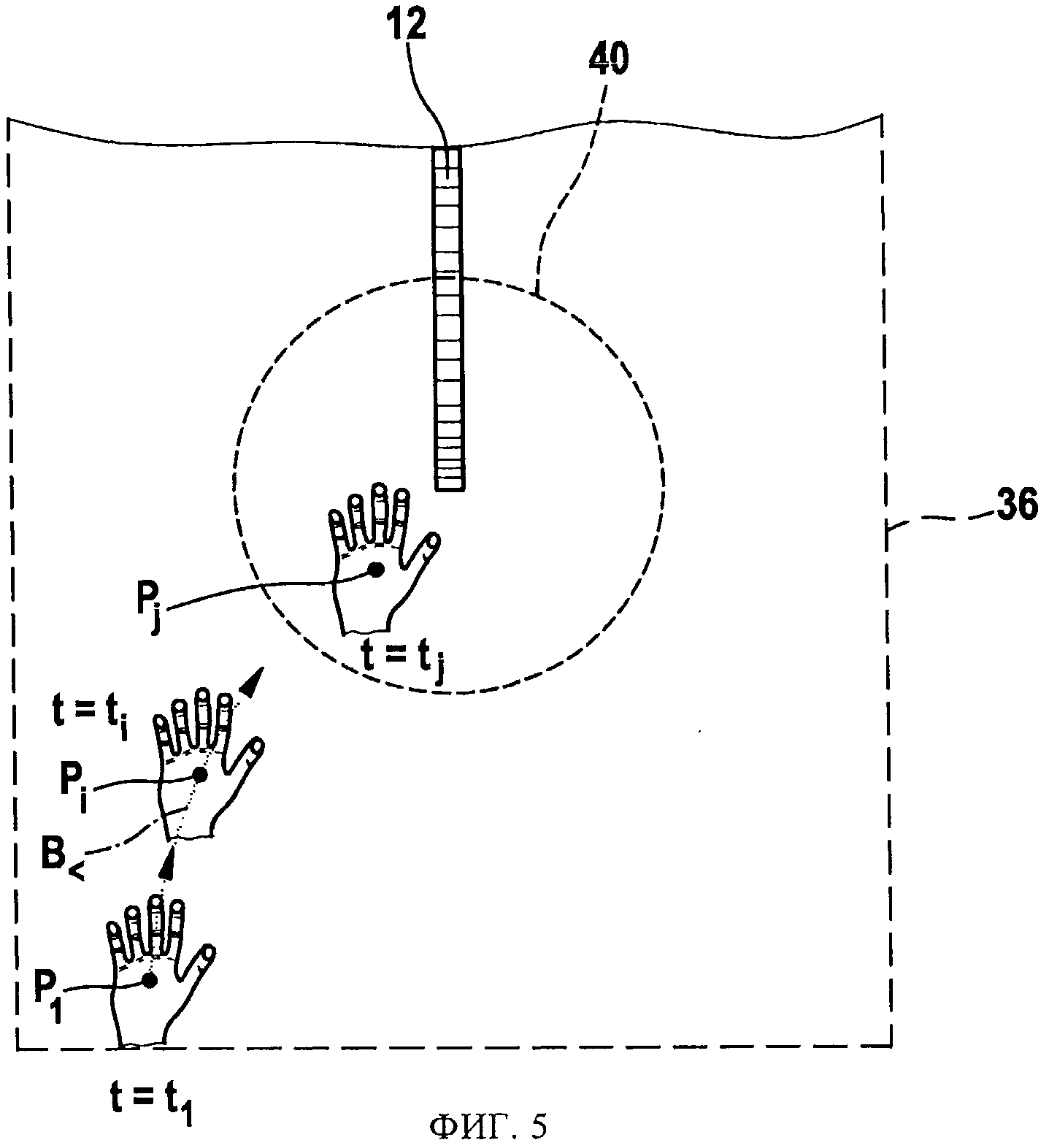
на фиг.5 - распознавание присутствия руки человека в зоне рабочего инструмента.
Осуществление изобретения
На фиг.1 при виде сбоку показана технологическая машина 10, выполненная в виде стационарного инструмента (станка), а именно в виде настольной циркулярной, или дисковой, пилы. Технологическая машина 10 имеет рабочий инструмент 12, выполненный в виде пильного диска (дискообразного пильного полотна) и во время пиления приводимый во вращение посредством узла 16 привода, который расположен в корпусе 14 привода и выполнен в виде электродвигателя. На корпус 14 привода опирается рабочий стол 18, на который можно положить обрабатываемую заготовку 20. Для защиты оператора технологическая машина 10 содержит защитное устройство 22, предназначенное для ограждения рабочего инструмента 12 и закрывающее режущую кромку рабочего инструмента 12 на отрезке ее окружности. В неработающем состоянии технологической машины 10 защитное устройство закрывает часть рабочего инструмента 12, выступающую из рабочего стола 18. Для выполнения обработки заготовки 20 оператор перемещает ее известным образом от себя в направлении 24 подачи к рабочему инструменту 12, причем на чертеже схематично показана рука 26 оператора. При этом защитное устройство 22, установленное с возможностью поворота вокруг оси 28 вращения, отклоняется надвигающейся заготовкой 20 вверх, открывая режущую кромку рабочего инструмента.
Для повышения безопасности оператора технологическая машина 10 снабжена предохранительным устройством 30. Предохранительное устройство 30 технологической машины содержит показанный на фиг.3 блок 32 распознавания, предусмотренный для распознавания (обнаружения) опасной ситуации при использовании технологической машины 10. Для этого блок 32 распознавания включает в себя блок 34 регистрации изображений, который выполнен в виде видеокамеры и служит для контроля первой зоны 36 обеспечения безопасности. Зона 36 обеспечения безопасности видна на фиг.2, где технологическая машина 10 изображена при виде сверху. Для наглядности защитное устройство 22 на фиг.2 не показано. Помимо блока 34 регистрации изображений блок 32 распознавания включает в себя сенсорный блок 38, предусмотренный для контроля второй зоны 40 обеспечения безопасности.
Как показано на фиг.2, зоны 36, 40 обеспечения безопасности выполнены отличными друг от друга, т.е. не совпадающими друг с другом. Вторая зона 40 обеспечения безопасности соответствует зоне рабочего инструмента. Эта зона состоит из точек, для которых наименьшее расстояние до рабочего инструмента 12 составляет не более 2 см. В частности, контролируемая зона рабочего инструмента состоит из точек, для которых наименьшее расстояние до передней области кромки рабочего инструмента 12 составляет не более 2 см. При этом передняя область кромки рабочего инструмента 12 соответствует той области, в которой заготовка 20 контактирует с вращающейся кромкой рабочего инструмента 12. В рассматриваемом варианте осуществления изобретения зона 40 обеспечения безопасности выполнена круглой. Ее центр находится в области кромки рабочего инструмента 12 и имеет радиус 2 см. Форма контролируемой зоны 40 обеспечения безопасности задана сенсорным блоком 38, в частности не показанным на чертеже оптическим устройством сенсорного блока 38, причем зона обеспечения безопасности может иметь и другие целесообразные с точки зрения специалиста формы. Первая зона 36 обеспечения безопасности больше, чем вторая зона 40 обеспечения безопасности, и охватывает эту вторую зону 40 обеспечения безопасности. Контур первой зоны 36 обеспечения безопасности на рабочем столе 18 охватывает, в частности, по меньшей мере 25%, предпочтительно по меньшей мере 50% всей площади поверхности рабочего стола.
Блок 34 регистрации изображений зафиксирован над рабочим столом 18, а именно над рабочим инструментом 12, посредством опорного приспособления 42, выполненного в виде крепежной консоли, причем опорное приспособление 42 может крепиться на рабочем столе 18 и/или на корпус 14 привода. Сенсорный блок 38 закреплен в защитном устройстве 22, предпочтительно в той части защитного устройства 22, которая расположена над областью кромки рабочего инструмента 12. Возможен также вариант осуществления изобретения, где в защитном устройстве 22 расположен и блок 34 регистрации изображений. При этом блок 34 регистрации изображений для обеспечения большого поля зрения может быть снабжен широкоугольной защитной оптикой (объективом). Возможно также размещение блока 34 регистрации изображений и/или сенсорного блока 38 сбоку от рабочего инструмента 12, например на упоре для заготовки.
Ниже со ссылкой на фиг.3 рассматривается принцип работы предохранительного устройства 30 технологической машины. На этом чертеже схематично показан блок 32 распознавания, включающий в себя блок 34 регистрации изображений, сенсорный блок 38 и блок 44 анализа (обработки данных). Последний предусмотрен для анализа данных, получаемых блоком 34 регистрации изображений и сенсорным блоком 38. Блок 44 анализа может быть выполнен в виде одного отдельного средства анализа данных, сопряженного с блоком 34 регистрации изображений и сенсорным блоком 38, или же он может включать в себя первое средство анализа данных для блока 34 регистрации изображений и другое, отличное от первого, средство анализа данных для сенсорного блока 38. Блок 44 анализа имеет, например, по меньшей мере один микропроцессор и может иметь запоминающее устройство, например для хранения программы анализа и/или данных анализа. Предохранительное устройство 30 технологической машины содержит также блок 46 управления, функционально связанный с блоком 44 анализа и с исполнительными органами 48, 50. Исполнительный орган 48, функционально связанный с узлом 16 привода, предусмотрен для того, чтобы в зависимости от запускающего сигнала блока 46 управления изменять режим привода рабочего инструмента 12. В частности, посредством исполнительного органа 48 можно уменьшать частоту вращения рабочего инструмента 12 или полностью останавливать привод рабочего инструмента. Предохранительное устройство 30 технологической машины содержит также еще один исполнительный орган 50, функционально связанный с блоком 46 управления и предусмотренный для приведения в движение предохранительного средства 52 в зависимости от запускающего сигнала блока 46 управления. Это предохранительное средство 52, которое также показано на фиг.1, выполнено в виде тормозного устройства, которое выполнено, например, в виде тормозного диска или тормозного барабана, обеспечивающего торможение вращающегося рабочего инструмента 12. При этом предохранительное средство 52 может затормаживать рабочий инструмент 12 путем создания непосредственного контакта с рабочим инструментом 12 и/или с приводным валом для приведения в движение рабочего инструмента 12. Предохранительное устройство 30 технологической машины может иметь дополнительные предохранительные средства, которые могут приводиться в действие посредством исполнительного органа 50. Например, может быть предусмотрено предохранительное средство, которое при необходимости выводит рабочий инструмент 12 из рабочей зоны технологической машины 10, например путем опускания рабочего инструмента 12 в корпус 14 привода. Вместо этого или дополнительно к этому исполнительный орган 50 может приводить в действие предохранительное средство, которое при необходимости инициирует перемещение защитного устройства 22 для блокирования доступа к области кромки рабочего инструмента 12.
Блок 34 регистрации изображений выполнен, как указано выше, в виде видеокамеры, предусмотренной, в частности, для получения изображений в видимой области спектра. Возможно также выполнение блока 34 регистрации изображений в виде инфракрасной камеры. При этом такая инфракрасная камера может быть предусмотрена для регистрации изображений в одном или нескольких из следующих областей инфракрасного излучения: ближняя область (IR-A), коротковолновая область (IR-B) и/или средне- и длинноволновая область (IR-C). В дополнение к регистрации изображений в инфракрасной области спектра инфракрасная камера может быть предусмотрена для регистрации изображений в видимой области спектра. Блок 44 анализа служит для осуществляемого на основании данных изображений, полученных блоком 34 регистрации изображений, анализа признака цвета, признака контура и/или признака текстуры для объекта, находящегося в первой зоне 36 обеспечения безопасности. В частности, блок 44 анализа предусмотрен для того, чтобы на основании одного или нескольких этих признаков распознавать присутствие части человеческого тела в зоне 36 обеспечения безопасности. При этом блок 44 анализа целенаправленно исследует полученные блоком 34 регистрации изображений и сохраненные в памяти данные изображений на предмет распознавания признака, характерного для ткани человеческого тела и/или типичного предмета одежды, носимого оператором, например защитной перчатки. Процесс распознавания может осуществляться, например, посредством сравнения полученных данных изображений с сохраненными в запоминающем устройстве данными образцовых изображений.
Блок 46 управления также имеет режим калибровки. Этот режим заложен, например в форме программы, в не показанное на чертеже запоминающее устройство, сопряженное с блоком 46 управления. При работе машины в режиме калибровки перед приведением в движение рабочего инструмента выполняется процесс калибровки блока 32 распознавания, для чего конечный пользователь технологической машины 10 помещает руку в поле зрения блока 34 регистрации изображений и/или сенсорного блока 38, причем признаки руки анализируются блоком 44 анализа и сохраняются в запоминающем устройстве. Это позволяет учитывать условия освещенности и окраску руки при выполнении процесса распознавания впоследствии.
Если процесс анализа, проведенный блоком 44 анализа, привел к распознаванию определенной ситуации, т.е. при наличии результата состоявшегося распознавания, в блок 46 управления подается сигнал распознавания. Разрешающую способность (разрешение) блока 34 регистрации изображений выбирают с таким расчетом, чтобы анализ признаков на основе полученных данных изображений выполнялся с высокой точностью. Например, блок 34 регистрации изображений может иметь разрешение, составляющее по меньшей мере 64×64 пикселей.
Предпочтительно, чтобы сенсорный блок 38 имел меньшее время регистрации для считывания относящейся к нему ему зоны 40 обеспечения безопасности, чем блок 34 регистрации изображений. Блок 34 регистрации изображений, выполненный в виде видеокамеры, обычно имеет частоту кадров, соответствующую определенному времени регистрации. Сенсорный блок 38 выбирают имеющим меньшее разрешение, чем блок 34 регистрации изображений. Например, сенсорный блок 38 может иметь разрешение, обычно на два порядка меньшее разрешения блока 34 регистрации изображений. Благодаря этому процесс распознавания сенсорным блоком 38 присутствия части человеческого тела в соответствующей зона 40 обеспечения безопасности может быть короче. Для достижения особо малого времени распознавания сенсорный блок 38 выполнен в виде инфракрасного датчика. Подобный датчик обычно имеет частоту кадров, большую частоты кадров блока 34 регистрации изображений и таким образом соответствующую меньшему времени регистрации. Сенсорный блок 38 предпочтительно имеет диапазон чувствительности, подходящий для регистрации излучения в тепловой инфракрасной области спектра. В частности, диапазон чувствительности предусмотрен для регистрации излучения абсолютно черного тела в интервале длин волн, соответствующем температурному интервалу, включающему в себя температуру, типичную для контролируемой части человеческого тела. В рассматриваемом примере сенсорный блок 38 выполнен в виде термоэлектрического столбика (термостолбика). Кроме того, сенсорный блок 38 может быть выполнен в виде пироэлектрического датчика или болометрического датчика. Если процесс анализа, выполненный блоком 44 анализа на основании зарегистрированных сенсорным блоком 38 температурных параметров, завершился распознаванием, блоком 44 анализа в блок 46 управления выдается сигнал распознавания.
Блок 46 управления обеспечивает приведение в действие одного или нескольких исполнительных органов 48, 50 в зависимости от сигнала блока 44 анализа. При этом он передает на соответствующий исполнительный орган 48 или 50 запускающий сигнал. Блок 46 управления в предпочтительном исполнении имеет по меньшей мере один микропроцессор и также может содержать запоминающее устройство для хранения данных, например для хранения программы, обеспечивающей выполнение операций управления. Блок 46 управления ставит условием приведения в действие одного из исполнительных органов 48, 50 выполнение процесса распознавания с помощью блока 34 регистрации изображений и выполнение процесса распознавания с помощью сенсорного блока 38. При наличии результата выполненного с участием блока 34 регистрации изображений процесса распознавания, т.е. если в блок 46 управления подан сигнал распознавания, инициированный блоком 34 регистрации изображений, после выполнения этого процесса исполнительный орган 48 или 50 может быть приведен в действие блоком 46 управления с помощью сигнала распознавания, выданного посредством сенсорного блока 38. Если в результате выполнения процесса распознавания с участием сенсорного блока 38 в блок 46 управления подан сигнал распознавания без предшествующей выдачи сигнала распознавания посредством блока 34 регистрации изображений, блок 46 управления не выдает команды на приведение в действие исполнительного органа 48 или 50. Для этого блок 46 управления снабжен средством 54 управления. Это средство управления предусмотрено для того, чтобы при нахождении блока 46 управления в режиме запрещения блокировать приведение в действие исполнительного органа 48 или 50 при выдаче сигнала распознавания, инициированной сенсорным блоком 38, т.е. выполненной на основании данных сенсорного блока. При включении предохранительного устройства 30 технологической машины блок 46 управления автоматически работает в режиме запрещения. Если в блок 46 управления подан сигнал распознавания, выдача которого инициирована сенсорным блоком 38, этот сигнал распознавания не преобразуется в запускающий сигнал на приведение в действие исполнительного органа 48 или 50. На основании же сигнала распознавания, выданного в результате работы блока 34 регистрации изображений, приведение в действие исполнительного органа 48 или 50 в режиме запрещения возможно. Если в блок 46 управления поступит сигнал распознавания, выданный посредством блока 34 регистрации изображений, блок 46 управления перейдет в режим разрешения, в котором средство 54 управления снимает блокировку приведения в действие исполнительного органа. В этом режиме разрешения сигнал распознавания, выдача которого инициирована сенсорным блоком 38, может быть преобразован блоком 46 управления в запускающий сигнал на приведение в действие исполнительного органа 48 или 50.
Процессы распознавания, выполняемые посредством блока 34 регистрации изображений и сенсорного блока 38, подробнее поясняются ниже со ссылкой на фиг.4 и 5. На фиг.4 и 5 показан участок рабочего стола 18, на котором при виде сверху обозначены контуры контролируемых зон 36, 40 обеспечения безопасности (прерывистыми линиями), а также фрагмент рабочего инструмента 12. После того как в зоне 36 обеспечения безопасности обнаружено присутствие части человеческого тела, в частности руки оператора, в момент времени t1 определяется ее положение P1 относительно зоны 40 обеспечения безопасности. Блок 34 регистрации изображений непрерывно, в следующие друг за другом моменты времени, регистрирует изображения зоны 36 обеспечения безопасности. Анализ данных изображений осуществляется в режиме реального времени, для чего блок 44 анализа непрерывно анализирует регистрируемую серию изображений. При этом зарегистрированные изображения могут анализироваться друг за другом, или последовательно. В рассматриваемом на фиг.4 примере в более поздний момент времени ti установлено, что рука оператора находится в положении Рi. Между моментами времени t1 и ti может быть получена серия изображений, которая на рассматриваемом чертеже для наглядности не показана. Путем установления различных положений руки оператора между положениями Рi и Р1блоком 44 анализа определяется траектория В< движения руки оператора. На основании этой траектории В< движения, соответствующей пути, пройденному рукой оператора к текущему моменту ti регистрации изображения, блок 44 анализа вычисляет ожидаемое положение Р> руки оператора в более поздний момент времени t>. При этом траектория движения В<, определенная на основании полученных изображений, экстраполируется блоком 44 анализа на будущее положение Р>. Если траектория В< движения или экстраполированная траектория движения идентифицирована блоком 44 анализа как траектория движения, ведущая к зоне 40 обеспечения безопасности, блок 44 анализа передает в блок 46 управления сигнал распознавания. По этому сигналу осуществляется переход из режима запрещения в режим разрешения. В одном режиме обеспечения безопасности блок 46 управления предусмотрен для того, чтобы на основании этого сигнала распознавания, выданного посредством блока 34 регистрации изображений, выдавать оператору предупреждение посредством оптического и/или звукового сигнала. Блок 44 анализа также предусмотрен для того, чтобы на основании полученных в различные моменты времени изображений (снимков) определять степень быстроты движения руки оператора, обнаруженной в зоне 36 обеспечения безопасности. На основе сравнения положений Pi и Р1, определенных в два момента времени ti и t1, блок 44 анализа определяет степень быстроты движения объекта. Например, перемещению руки может быть присвоена степень скорости движения "быстрое", "умеренно быстрое", "медленное" и т.д. Если перемещение руки идентифицировано как "быстрое", блок 44 анализа выдает сигнал распознавания, на основании которого блок 46 управления инициирует приведение в действие исполнительного органа 48 или 50. Если перемещение руки классифицировано как "умеренно быстрое" или "медленное" и направленное к зоне 40 обеспечения безопасности, блок 44 анализа выдает сигнал распознавания, на основании которого включается описанный выше режим разрешения, и оператору выдается предупреждение.
На фиг.5 представленная на фиг.4 ситуация показана в момент времени tj>ti. При этом рука оператора находится в зоне 40 обеспечения безопасности в положении Рj. Сенсорный блок 38 посредством регистрации исходящего от руки излучения абсолютно черного тела распознает температурную сигнатуру руки, в результате чего спустя короткий промежуток времени, затраченный на распознавание, в блок 46 управления передается сигнал распознавания. Как было отмечено выше, блок 46 управления в силу определенной им траектории В< движения руки находится в режиме разрешения, и, соответственно, блок 46 управления преобразует сигнал распознавания в запускающий сигнал на приведение в действие исполнительного органа 48 или 50. При этом, например, останавливается вращательный привод рабочего инструмента 12, или рабочий инструмент 12 убирается в корпус 14 привода за счет приведения в действие пружинного стопора. В еще одном режиме обеспечения безопасности блок 44 анализа может на основании зафиксированных сенсорным блоком 38 параметров определить траекторию движения руки в зоне 40 обеспечения безопасности и выдать сигнал распознавания в зависимости от формы определенной траектории движения.
Предлагаемое в изобретении предохранительное устройство 30 подходит и для других технологических машин, при работе с которыми целесообразно обнаруживать/распознавать часть человеческого тела, таких как торцовочно-усорезные пилы, пилы с протягиваемым пильным агрегатом, панельные пилы, вертикальные фрезерные машины и т.д.
Реферат
Изобретение относится к предохранительному устройству технологической машины. Предохранительное устройство содержит блок распознавания, предусмотренный для распознавания рабочей ситуации у технологической машины. Блок распознавания включает блок регистрации изображений, предназначенный для контроля первой зоны обеспечения безопасности, и сенсорный блок, отличный от блока регистрации изображений и предназначенный для контроля второй зоны обеспечения безопасности. Вторая зона обеспечения безопасности соответствует зоне рабочего инструмента технологической машины. Сенсорный блок имеет по меньшей мере один диапазон чувствительности для регистрации излучения в инфракрасной области спектра. В результате обеспечивается повышение безопасности. 2 н. и 10 з.п. ф-лы, 5 ил.
Комментарии