Устройство для стабилизации цепи в гипертермическом терапевтическом аппарате и способ его использования - RU2413481C2
Код документа: RU2413481C2
Чертежи



Описание
Область техники
Настоящее изобретение относится к устройству для стабилизации цепи в гипертермическом терапевтическом аппарате и способу его использования, более конкретно к устройству для стабилизации цепи, которое может предотвращать провисание цепи даже при движении гипертермического терапевтического аппарата в вертикальном направлении при использовании, а также к способу использования устройства для стабилизации цепи.
Уровень техники
Гипертермический терапевтический аппарат, который широко используют в настоящее время, применяется как тип оборудования для лечения физического состояния, при котором гипертермический терапевтический аппарат перемещают возвратно-поступательными движениями по позвоночным областям пациента, включая шейные и поясничные позвонки, для создания горячего компресса и выполнения акупрессуры с одновременным инфракрасным излучением в дальней области спектра. Хорошо известно, что такой гипертермический терапевтический аппарат действует на пациента альтернативным медицинским методом. В основном используют гипертермический терапевтический аппарат кроватного типа, который используется для гипертермического лечения позвоночных областей пациента, включая шейные и поясничные позвонки, в состоянии, когда пациент лежит на матрасе, установленном на каркасе в форме кровати. Гипертермический терапевтический аппарат кроватного типа содержит гипертермический терапевтический аппарат для горячей акупрессуры и облучения позвоночных областей пациента дальним ИК-излучением, подвижный объект, который соединен с гипертермическим терапевтическим аппаратом, надежно поддерживает его и возвратно-поступательно перемещается в матрасе, движущее средство, соединенное с подвижным объектом в продольном направлении, и двигатель для создания усилия, заставляющего движущее средство возвратно-поступательно перемещать подвижный объект в матрасе.
Подвижный объект соединен посредством роликов, имеющихся на обеих его боковых поверхностях, с рельсами, установленными на обеих сторонах внутри матраса.
Однако с постепенным расширением функций гипертермического терапевтического аппарата кроватного типа в нем начинают применять изогнутые рельсы, сходные с позвоночными областями человека. В этой процедуре существует явление постепенного удлинения цепи или зубчатого ремня, используемого для перемещения подвижного объекта. Когда двигатель тянет подвижный объект, последний должен подниматься по изогнутым рельсам, при этом он подвергается давлению тела пациента. Таким образом, двигатель должен тянуть подвижный объект с повышенным усилием. Это вызывает повышенное натяжение цепи или зубчатого ремня.
Это явление является причиной жалоб пациентов о том, что гипертермический терапевтический аппарат часто применяют в течение длительного времени. Для решения этой проблемы изготовитель или пользователь прилагает все усилия для последующего технического обслуживания изделия.
Краткое описание изобретения
Техническая задача
Как сказано выше, при постоянном использовании общеизвестного гипертермического терапевтического аппарата кроватного типа цепь необходимо перемещать вверх/вниз на уровни изогнутых рельсов. Таким образом невозможно решить проблему удлинения цепи, которая неизбежно происходит при использовании гипертермического терапевтического аппарата.
Соответственно, одна цель настоящего изобретения заключается в создании устройства для стабилизации цепи, которое может фундаментально решить проблему удлинения цепи при использовании гипертермического терапевтического аппарата и позволить использовать имеющиеся изогнутые рельсы, соответствующие по форме телу пациента. Еще одной целью настоящего изобретения является создание устройства для стабилизации цепи, которое может фундаментально решить проблему удлинения цепи при использовании общеизвестных изогнутых рельсов в их существующем виде и обеспечить простоту конструкции при минимуме компонентов.
Еще одной целью настоящего изобретения является создание способа использования устройства для стабилизации цепи, которое может фундаментально решить проблему удлинения цепи при использовании гипертермического терапевтического аппарата и позволить использовать существующие изогнутые рельсы, соответствующие форме тела пациента.
Техническое решение
Настоящее изобретение относится к устройству для стабилизации цепи в гипертермическом терапевтическом аппарате, причем гипертермический терапевтический аппарат устанавливают с устройством для стабилизации цепи, и к способу использования устройства для стабилизации цепи.
Для выполнения этих целей настоящее изобретение предлагает устройство для стабилизации цепи в гипертермическом терапевтическом аппарате, содержащем блок управления стабилизацией цепи для стабильного перемещения цепи на постоянном уровне, независимо от движения гипертермического терапевтического аппарата вверх или вниз при переднем и заднем возвратно-поступательном перемещении гипертермического терапевтического аппарата, и блок управления натяжением цепи для регулирования натяжения цепи, которое может быть создано при переднем и заднем возвратно-поступательном перемещении гипертермического терапевтического аппарата.
В настоящем изобретении блок управления стабилизацией цепи может содержать: а) первый вал шарнира с вращающимися роликами на обоих его концах и соединительными звеньями цепи на обеих сторонах его центральной части; b) стержни управления уровнем, каждый из которых на одном конце шарнирно соединен с первым валом шарнира и на другом конце шарнирно соединен с вторым валом шарнира; с) второй вал шарнира, шарнирно соединенный с другими концами стержней управления уровнем и с нижним концом центральной части опоры гипертермического терапевтического аппарата; и d) опору гипертермического терапевтического аппарата с секцией для тела с смонтированным на ней гипертермическим терапевтическим аппаратом, причем опора гипертермического терапевтического аппарата на нижнем конце ее центральной части соединена с вторым валом шарнира и на ее обеих концах соединена с вращающимися роликами.
В настоящем изобретении ролики могут быть в зацеплении с прямыми рельсами, смонтированными внутри матраса гипертермического терапевтического аппарата. Для стабильного перемещения роликов по прямым рельсам и предотвращения их схода с рельсов в том случае, если гипертермический терапевтический аппарат будет под нагрузкой в перевернутом состоянии при транспортировке, предпочтительно, чтобы прямые рельсы были изготовлены на повернутые на 90° U-образные спаренные рельсы.
В настоящем изобретении стержни управления уровнем предпочтительно имеют верхние концы, уровни которых изменяют путем изменения углов наклона стержней таким образом, чтобы их нижние концы могли поворачиваться на первом вале шарнира в соответствии с передним и задним перемещением первого вала шарнира.
В настоящем изобретении блок управления натяжением цепи предпочтительно содержит свободный шкив, расположенный на стороне, противоположной электродвигателю, и свободно вращаемый надетой на него цепью; шкив управления уровнем, расположенный над и перед свободным шкивом, для регулировки уровня цепи в положениях соединительных звеньев цепи; секцию кожуха для защиты свободного шкива и шкива управления уровнем от внешнего давления и средство регулировки натяжения путем перемещения блока управления натяжением цепи вперед и назад по отношению к электродвигателю в зависимости от состояния натяжения цепи.
Гипертермический терапевтический аппарат настоящего изобретения содержит основной матрас с удлиненным пазом в его центральной части, причем гипертермический терапевтический аппарат совершает возвратно-поступательные движения в удлиненном пазе, рельсы на обеих сторонах нижней части центрального удлиненного паза основного матраса, служащие в качестве направляющих для передних и задних возвратно-поступательных перемещений гипертермического терапевтического аппарата; блок управления стабилизацией цепи для стабильного движения цепи на постоянном уровне независимо от движения гипертермического терапевтического аппарата вверх и вниз при переднем и заднем возвратно-поступательном перемещении гипертермического терапевтического аппарата; блок управления натяжением цепи для регулировки натяжения цепи, которое создается при переднем/заднем возвратно-поступательном перемещении гипертермического терапевтического аппарата; средство подачи, содержащее электродвигатель для создания усилия возвратно-поступательного перемещения гипертермического терапевтического аппарата, цепь для передачи усилия электродвигателя на гипертермический терапевтический аппарат и пульт управления средством подачи, а также пульт управления местоположением гипертермического терапевтического аппарата роликового типа.
Предпочтительно, чтобы гипертермический терапевтический аппарат настоящего изобретения, кроме того, содержал вспомогательный матрас, электрически соединенный с основным матрасом, для выполнения горячего компресса на нижней части тела пациента.
Кроме того, предпочтительно, чтобы гипертермический терапевтический аппарат настоящего изобретения содержал каркас, на который могут быть установлены основной матрас и вспомогательный матрас.
Кроме того, гипертермический терапевтический аппарат настоящего изобретения может использоваться путем а) перемещения цепи, непосредственно соединенной с первым валом шарнира при поддержании постоянного уровня цепи независимо от перемещения гипертермического терапевтического аппарата вверх или вниз роликами, установленными на обоих концах первого вала шарнира в зацеплении с прямыми рельсами, при переднем/заднем возвратно-поступательном движении гипертермического терапевтического аппарата, чем обеспечивается стабилизация цепи; и b) если натяжение цепи не соответствует первоначальной регулировке при переднем/заднем возвратно-поступательном движении гипертермического терапевтического аппарата, сдвига положения гипертермического терапевтического аппарата вперед или назад по отношению к электродвигателю в зависимости от состояния натяжения цепи, чем регулируется натяжение цепи. Таким образом, гипертермический терапевтический аппарат можно использовать более эффективно и стабильно в течение всей вышеуказанной процедуры.
Преимущества
Как сказано выше, при использовании блока управления стабилизацией цепи гипертермического терапевтического аппарата согласно настоящему изобретению преимущество заключается в том, что, поскольку натяжение цепи всегда выдерживается постоянным, не создается явление удлинения цепи, которое может происходить в известных устройствах.
Более того, блок управления стабилизацией цепи гипертермического терапевтического аппарата согласно настоящему изобретению имеет преимущество в том, что он имеет простую конструкцию из минимума компонентов с использованием первого и второго валов шарнира как основных компонентов и шарнирного соединения стержней управления уровнем между валами шарниров.
Кроме того, блок управления стабилизацией цепи гипертермического терапевтического аппарата согласно настоящему изобретению имеет дополнительные преимущества в том, что для производства изделия небольшой массы используется минимум исходных материалов и нагрузка на электродвигатель снижается, что продлевает срок эксплуатации изделия.
Далее, поскольку блок управления стабилизацией цепи гипертермического терапевтического аппарата согласно настоящему изобретению снабжен средством для регулировки натяжения цепи, преимущество заключается в том, что пользователь может легко регулировать натяжение цепи с наружной стороны устройства, даже если натяжение цепи неизбежно снижается при использовании цепи в течение длительного времени.
Краткое описание чертежей
На Фиг.1 представлен схематический перспективный вид, иллюстрирующий устройство для стабилизации цепи в гипертермическом терапевтическом аппарате согласно настоящему изобретению.
На Фиг.2 представлен схематический перспективный вид главных частей устройства для стабилизации цепи в гипертермическом терапевтическом аппарате согласно настоящему изобретению.
На Фиг.3 представлен расширенный перспективный вид главных частей, показанных на Фиг.2.
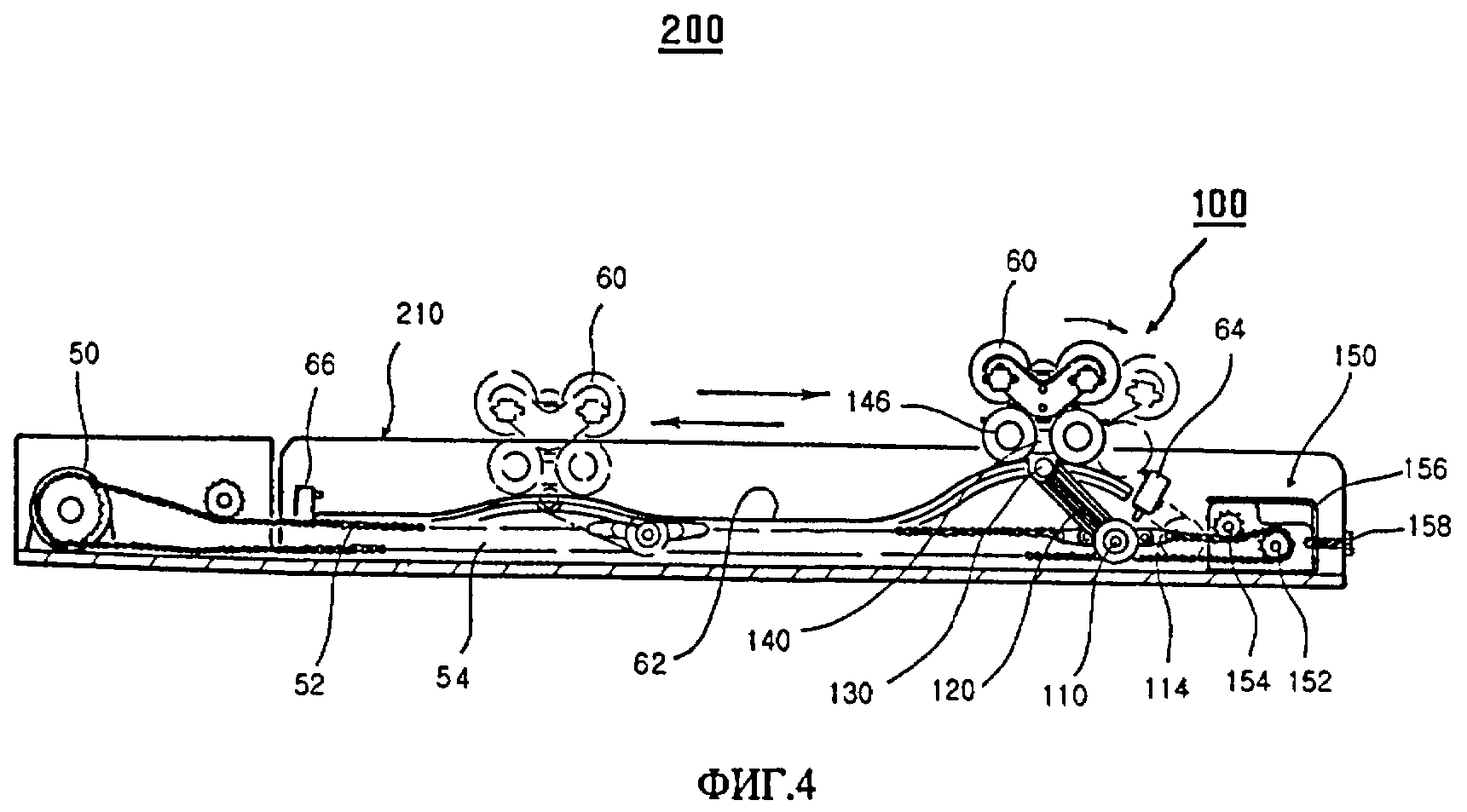
На Фиг.4 представлен схематический вид сбоку, показывающий использование устройства для стабилизации цепи в гипертермическом терапевтическом аппарате согласно настоящему изобретению.
Лучший вариант осуществления изобретения
Настоящее изобретение будет более подробно описано ниже со ссылками на прилагаемые чертежи. Однако станет понятно, что прилагаемые чертежи только иллюстрируют техническую сущность настоящего изобретения, которая ими не ограничивается.
Устройство 100 для стабилизации цепи в гипертермическом терапевтическом аппарате согласно настоящему изобретению содержит блок 101 управления стабилизацией цепи для стабильного перемещения цепи 52 на постоянном уровне независимо от движения вверх/вниз гипертермического терапевтического блок 60 во время переднего/заднего возвратно-поступательного движения гипертермического терапевтического аппарата. В настоящем изобретении блок 101 управления стабилизацией цепи содержит первый вал 110 шарнира, который перемещается вперед и назад под действием электродвигателя 50.
В настоящем изобретении первый вал 110 шарнира имеет секции 114 соединения с цепью на обеих сторонах его центральной части, и ремень или цепь 52 соединена с передней частью или задней частью устройства для стабилизации цепи через секции 114 соединения с цепью. Соответственно, при работе электродвигателя 50 ремень или цепь 52, соединенная с электродвигателем, перемещается вперед и назад, и первый вал 110 шарнира, соединенный с ремнем или цепью, также перемещается вперед/назад в ответ на перемещение ремня или цепи 52.
Первый вал 110 шарнира также имеет вращающиеся ролики 112 на его торцах. Ролики 112 введены в зацепление с прямыми рельсами 54, смонтированными на внутренней части матраса гипертермического терапевтического аппарата, и перемещаются вперед/назад по прямым рельсам 54. В данное время, для того, чтобы обеспечить стабильное перемещение роликов по прямым рельсам 54 и не допустить схода роликов 112 с рельсов в том случае, если гипертермический терапевтический аппарат грузят в перевернутом состоянии при транспортировке гипертермического терапевтического аппарата, предпочтительно, чтобы прямые рельсы 54 были повернутыми на 90° U-образными двойными рельсами.
В настоящем изобретении блок 101 управления стабилизацией цепи содержит стержни 120 управления уровнем, причем уровень их верхних концов изменяется путем изменения углов стержней таким образом, чтобы их нижние концы могли опираться на первый вал 110 шарнира согласно перемещению первого вала 110 шарнира вперед/назад.
В настоящем изобретении стержень 120 управления уровнем отличается тем, что его один конец шарнирно соединен с первым валом 110 шарнира. Поскольку один конец стержня 120 управления уровнем непосредственно и шарнирно соединен с первым валом 110 шарнира, стержень 120 управления уровнем перемещается непосредственно под действием электродвигателя 50, когда электродвигатель работает, этим изменяя конечный уровень стержня управления уровнем, и нет необходимости применять дополнительное шарнирное средство в другом положении для выполнения вышеуказанной функции. Соответственно, путем непосредственного и шарнирного соединения одного конца стержня 120 управления уровнем к первому валу 110 шарнира можно достичь максимального эффекта при простейшей конструкции.
Кроме того, в настоящем изобретении другой конец стержня 120 управления уровнем также непосредственно и шарнирно соединен с вторым валом 130 шарнира. Как сказано выше, это позволяет добиться наиболее эффективной работы при применении простейшей конструкции.
В настоящем изобретении блок 101 управления стабилизацией цепи содержит второй вал 130 шарнира, который перемещается вверх/вниз в ответ на изменяющиеся уровни стержней 120 управления уровнем. Другой конец стержня 120 управления уровнем шарнирно соединен с вторым валом 130 шарнира. Соответственно, когда уровень верхнего конца стержня 120 управления уровнем изменяется в направлении вверх/вниз, второй вал 130 шарнира может плавно перемещаться в направлении вверх/вниз благодаря шарнирному соединению между стержнем управления уровнем и вторым валом шарнира. Второй вал 130 шарнира одновременно шарнирно соединен с нижним концом центральной части опоры 140 гипертермического терапевтического аппарата. Благодаря этой конструкции, когда второй вал 130 шарнира перемещается вверх/вниз, опора 140 гипертермического терапевтического аппарата может двигаться вверх/вниз в ответ на перемещение второго вала шарнира.
В настоящем изобретении блок 101 управления стабилизацией цепи 101 содержит опору 140 гипертермического терапевтического аппарата, на которой может быть смонтирован гипертермический терапевтический блок 60.
В настоящем изобретении опора 140 гипертермического терапевтического аппарата содержит секцию 142 в ее центральной части, и гипертермический терапевтический блок 60 может быть смонтирован на секции 142. Гипертермический терапевтический блок 60 обеспечивает пациенту эффект горячего компресса, эффект акупрессуры и эффект облучения инфракрасными лучами дальней области спектра. Кроме того, опора 140 гипертермического терапевтического аппарата содержит секции 144 соединения с шарниром в центральной части ее нижней поверхности, и секции 144 соединения с шарниром непосредственно и шарнирно соединены со стержнями 120 управления уровнем посредством второго вала 130 шарнира. В настоящем изобретении причина, почему секции 144 соединения с шарниром соединены с центральной частью нижней поверхности опоры 140 гипертермического терапевтического аппарата и затем шарнирно соединены со стержнями 120 управления уровнем вместе с вторым валом 130 шарнира, заключается в том, что второй вал шарнира используется в качестве центрального вала шарнирного соединения для того, чтобы его структурную конфигурацию можно было минимизировать и получить простоту конструкции при максимальной эффективности. Более того, в настоящем изобретении опора 140 гипертермического терапевтического аппарата содержит ролики 146 на обеих ее боковых сторонах, которые соединены с ней с возможностью вращения. Ролики 146 введены в зацепление с изогнутыми рельсами 62 в противоположность конструкции, в которой ролики 112, соединенные с первым валом 110 шарнира, введены в зацепление с прямым рельсом 54. Соответственно, ролики 146 обеспечивают плавное перемещение опоры 140 гипертермического терапевтического аппарата в переднем/заднем направлениях и одновременно создают возможность плавного перемещения опоры 140 гипертермического терапевтического аппарата в направлениях вверх/вниз по изогнутым рельсам 62.
Устройство 100 для стабилизации цепи согласно настоящему изобретению содержит блок 150 управления натяжением цепи, способный регулировать натяжение цепи 52, которое создается при возвратно-поступательном движении вперед/назад гипертермического терапевтического блока 60.
В настоящем изобретении блок 150 управления натяжением цепи содержит свободный шкив 152, расположенный на стороне, противоположной электродвигателю, и свободно вращаемый обернутой вокруг него цепью 52, и шкив 154 управления уровнем, расположенный над и перед свободным шкивом, для регулировки уровня цепи 52 в положениях секций 114 соединения с цепью. В настоящем изобретении, когда цепь 52 перемещается электродвигателем 50, свободный шкив 152 обеспечивает точку поворота цепи, тогда как шкив 154 управления уровнем может постоянно поддерживать уровень цепи 52.
В настоящем изобретении блок 150 управления натяжением цепи содержит секцию 156 кожуха для защиты свободного шкива 152 и шкива 154 управления уровнем от внешних воздействий.
Кроме того, в настоящем изобретении блок 150 управления натяжением цепи содержит средство 158 для регулировки натяжения, которое может регулировать натяжение путем перемещения блока управления натяжением цепи вперед/назад по отношению к электродвигателю 50 в зависимости от натяжения цепи 52. Средство 158 для регулировки натяжения может состоять из болта и гайки, которые могут регулироваться для изменения фактического положения блока 150 управления натяжением цепи вперед или назад по отношению к электродвигателю 50, этим регулируя натяжение цепи 52.
Кроме того, настоящее изобретение предлагает гипертермический терапевтический аппарат 200, содержащий устройство 100 для стабилизации цепи.
На Фиг.4 представлен вид в боковом разрезе, показывающий рабочее отношение между гипертермическим терапевтическим аппаратом 200 и устройством 100 для стабилизации цепи, иллюстрируя взаимосвязи между соответствующими компонентами, смонтированными в основном матрасе гипертермического терапевтического аппарата.
Гипертермический терапевтический аппарат 200 согласно настоящему изобретению содержит основной матрас 210, имеющий удлиненную канавку в его центральной части, и блок 60 гипертермического терапевтического воздействия, который возвратно-поступательно перемещается в удлиненной канавке. Основной матрас 210 используется для выполнения функции горячего компресса на верхней части тела пациента, когда последний лежит на основном матрасе. Основной матрас является обычным компонентом гипертермического терапевтического аппарата.
Гипертермический терапевтический аппарат 200 согласно настоящему изобретению содержит рельсы, выполненные на обеих сторонах нижней части центральной удлиненной канавки основного матраса 210 и служащие направляющими для возвратно-поступательного движения вперед/назад или движения вверх/вниз блока 60 гипертермического терапевтического воздействия. Рельсы включают в себя прямые рельсы 54 для прямого возвратно-поступательного движения блока 60 гипертермического терапевтического воздействия и изогнутые рельсы 62 для вертикального перемещения блока 60 гипертермического терапевтического воздействия.
Кроме того, гипертермический терапевтический аппарат 200 согласно настоящему изобретению содержит блок 101 управления стабилизацией цепи, который стабильно перемещает цепь 52 на постоянном уровне независимо от вертикального перемещения блока 60 гипертермического терапевтического воздействия во время возвратно-поступательного движения вперед/назад блока гипертермического терапевтического воздействия. Поскольку блок 101 управления стабилизацией цепи был подробно описан выше, его повторное описание здесь приведено не будет.
Далее, гипертермический терапевтический аппарат 200 согласно настоящему изобретению содержит блок 150 управления натяжением цепи, способный регулировать натяжение цепи 52, которое создается при переднем/заднем возвратно-поступательном движении блока 60 гипертермического терапевтического воздействия. Аналогично, поскольку блок 150 управления натяжением цепи был подробно описан выше, его повторное описание здесь приведено не будет.
Кроме того, гипертермический терапевтический аппарат 200 согласно настоящему изобретению содержит средство подачи, включающее в себя электродвигатель 50 для создания усилия для возвратно-поступательного перемещения блока 60 гипертермического терапевтического воздействия и цепь 52 для передачи этого усилия электродвигателя на блок гипертермического терапевтического воздействия, пульт управления (не показан) для управления средством подачи и рабочий пульт (не показан) для изменения положения гипертермического терапевтического аппарата роликового типа. Однако поскольку эти компоненты обычно используются в традиционных гипертермических терапевтических аппаратах, их подробное описание здесь приведено не будет.
Настоящее изобретение вышеописанной конструкции работает следующим образом (смотрите Фиг.4).
Прежде всего описание будет относиться к случаю, когда пользователь эксплуатирует электродвигатель 50 с помощью пульта дистанционного управления (не показан), так, чтобы устройство 100 для стабилизации цепи гипертермического терапевтического аппарата согласно настоящему изобретению можно было перемещать назад (вправо на Фиг.3).
Когда пользователь приводит в действие электродвигатель 50, цепь 52 натягивается в заднем направлении вращательным усилием электродвигателя, и цепь 52 тянет первый вал 110 шарнира, соединенный с ней, назад. В это время, поскольку ролики 112, соединенные с обоими боковыми торцами первого вала 110 шарнира, введены в зацепление с возможностью вращения в прямые рельсы 54, ролики вращаются при качении по прямым рельсам 54, так чтобы первый вал 110 шарнира линейно перемещался в заднем направлении (вправо на Фиг.3).
В это время, когда первый вал 110 шарнира протягивается в заднем направлении, тяговое усилие передается на стержни 120 управления уровнем, шарнирно соединенные с первым валом шарнира, и затем передается на второй вал 120 шарнира. Далее это тяговое усилие передается на опору 140 гипертермического терапевтического аппарата, соединенную с вторым валом шарнира. Соответственно, когда электродвигатель 50 работает, опора 140 гипертермического терапевтического аппарата полностью перемещается назад в ответ на действие электродвигателя.
В это время, однако, поскольку блок 60 гипертермического терапевтического воздействия, смонтированный на опоре 140 гипертермического терапевтического аппарата, поддерживает позвоночные области пациента, который лежит на гипертермическом терапевтическом аппарате, на опору 140 гипертермического терапевтического аппарата естественно оказывается усилие, направленное вниз.
В этом состоянии, когда первый вал 110 шарнира достигает изогнутых частей изогнутых рельсов 62, ролики 146, соединенные с обеими боковыми торцами опоры 140 гипертермического терапевтического аппарата, движутся вверх по изогнутым частям изогнутых рельсов 62. В это же время опора 140 гипертермического терапевтического аппарата движется вверх, так, чтобы смонтированный на ней блок 60 гипертермического терапевтического воздействия мог одновременно двигаться вверх. При дальнейшей работе электродвигателя 50 ролики 146 пройдут изогнутые части изогнутых рельсов 62 и достигнут наклонных частей изогнутых рельсов. Соответственно, блок 60 гипертермического терапевтического воздействия начнет постепенно двигаться вниз. Однако при дальнейшей работе электродвигателя 50 ролики 146 нажмут на выключатель 64 для изменения направления вращения электродвигателя. Поэтому с помощью выключателя 64 направление вращения электродвигателя 50 будет изменено на противоположное.
Впоследствии, в ответ на изменение направления вращения электродвигателя 50 на противоположное направление движения устройства 100 для стабилизации цепи в гипертермическом терапевтическом аппарате согласно настоящему изобретению также изменится на движение в направлении электродвигателя 50 (влево на Фиг.3).
В этом случае цепь 52 перемещается в направлении электродвигателя 50, и тяговое усилие передается непосредственно на стержни 120 управления уровнем, чтобы стержни 120 управления уровнем перемещались вперед, перемещая шарнирно соединенную с ними опору 140 гипертермического терапевтического аппарата вниз. После этого, когда стержни управления уровнем снова пройдут прямые участки и достигнут изогнутых участков изогнутых рельсов 62, стержни управления уровнем поднимут опору 140 гипертермического терапевтического аппарата и продолжат двигаться в направлении электродвигателя 50. В конечном счете направление перемещения стержней управления уровнем будет изменено выключателем 66 путем изменения направления вращения электродвигателя.
При этом, в зависимости от направления вращения электродвигателя 50, опора 140 гипертермического терапевтического аппарата и блок 60 гипертермического терапевтического воздействия, смонтированный на ней, перемещаются вперед/назад и вверх/вниз по изогнутым участкам изогнутых рельсов 62. Это можно делать и при использовании традиционных изогнутых рельсов без их переделки.
Напротив, даже если электродвигатель 50 вращается в переднем и обратном направлениях, первый вал 110 шарнира движется только прямо роликами 112, соединенными с возможностью вращения с прямыми рельсами 54, без перемещения по вертикали. Соответственно, даже когда блок 60 гипертермического терапевтического воздействия перемещается в направлении вперед/назад, цепь 52, соединенная непосредственно с первым валом 110 шарнира, подвергается натяжению в прямом направлении. Таким образом, цепь всегда подвергается единообразному натяжению.
В то же время, если цепь 52 вытягивается и имеет пониженное натяжение вследствие длительного использования пользователем гипертермического терапевтического аппарата, или если пользователь намеренно немного ослабит натяжение цепи, достаточно просто сдвинуть блок 150 управления натяжением цепи. Например, пользователь может регулировать натяжение цепи 52, закрепляя или освобождая средство 158 для регулировки натяжения, способное сдвигать вперед или назад блок управления натяжением по отношению к электродвигателю в зависимости от натяжения цепи 52.
Промышленная применимость
Поскольку в устройстве для стабилизации цепи гипертермического терапевтического аппарата согласно настоящему изобретению использовано минимальное количество основных компонентов, можно получить экономию сырья, упростить процесс сборки изделия и значительно уменьшить возможность поломки даже при длительном использовании аппарата.
Хотя устройство для стабилизации цепи в гипертермическом терапевтическом аппарате согласно настоящему изобретению описано выше, это описание предназначено только для иллюстрации наиболее предпочтительного варианта осуществления настоящего изобретения. Настоящее изобретение им не ограничено, и объем изобретения определяется только прилагаемой формулой изобретения.
Кроме того, будет понятно, что специалисты в данной области техники могут внести в аппарат различные изменения, исходя из описания, и такие различные изменения входят в объем настоящего изобретения.
Реферат
Изобретение относится к устройству для стабилизации цепи гипертермического терапевтического аппарата и способу его использования. Устройство содержит блок управления стабилизацией цепи для стабильного перемещения цепи на постоянном уровне независимо от перемещения вверх или вниз блока гипертермического терапевтического воздействия гипертермического терапевтического аппарата, блок управления натяжением цепи, включающий первый вал шарнира, имеющий вращающиеся ролики на обоих его торцах и секции соединения с цепью на обеих сторонах его центральной части, стержни управления уровнем, шарнирно соединенные концами с первым и вторым валами шарнира. Второй вал шарнира соединен с другими концами стержней управления уровнем и одновременно с нижним торцом центральной части опоры гипертермического терапевтического аппарата. Опора имеет секцию с установленным на ней блоком гипертермического терапевтического воздействия, причем опора снабжена вращающимися роликами, соединенными с ее обеими боковыми торцами. Блок управления натяжением цепи содержит свободный шкив, расположенный на стороне, противоположной электродвигателю, и свободно вращаемый цепью, обернутой вокруг него. Шкив управления уровнем расположен выше свободного шкива для регулировки уровня цепи в положениях секций для соединения с цепью. Устройство также содержит секцию кожуха для защиты свободного шкива и шкива управления уровнем от внешних воздействий и средство для регулировки натяжения путем перемещения блока управления натяжением цепи вперед или назад по отношению к электродвигателю в зависимости от натяжения цепи. Устройство для
Формула
блок (101) управления стабилизацией цепи для стабильного перемещения цепи (52) на постоянном уровне независимо от перемещения вверх или вниз блока гипертермического терапевтического воздействия во время переднего/заднего возвратно-поступательного движения блока гипертермического терапевтического воздействия; блок (150) управления натяжением цепи для регулировки натяжения цепи (52), которое создается при переднем/заднем возвратно-поступательном движении блока (60) гипертермического терапевтического воздействия; средство подачи, содержащее электродвигатель (50) для создания усилия при использовании блока (60) гипертермического терапевтического воздействия и цепь (52) для передачи усилия электродвигателя на блок гипертермического терапевтического воздействия; и пульт управления для управления средством подачи и рабочий пульт для изменения положения гипертермического терапевтического аппарата роликового типа, причем блок (101) управления стабилизацией цепи содержит первый вал (110) шарнира, имеющий вращающиеся ролики (112) на обеих торцах и секции (114) соединения с цепью на обеих сторонах его центральной части, стержни (120) управления уровнем, где каждый из стержней управления уровнем на одном конце шарнирно соединен с первым валом (110) шарнира и на другом конце шарнирно соединен с вторым валом (130) шарнира; второй вал (130) шарнира, шарнирно соединенный с другими концами стержней (120) управления уровнем и одновременно с нижним торцом центральной части опоры (140) гипертермического терапевтического аппарата; и опору (140) гипертермического терапевтического аппарата, имеющую секцию (142) с установленным на ней блоком (60) гипертермического терапевтического воздействия, причем опора гипертермического терапевтического аппарата имеет вращающиеся ролики (146), соединенные с обеими боковыми торцами, а блок (150) управления натяжением цепи содержит свободный шкив (152), расположенный на стороне, противоположной электродвигателю (50) и свободно вращаемый цепью (52), обернутой вокруг него; шкив (154) управления уровнем, расположенный выше свободного шкива, для регулировки уровня цепи (52) в положениях секций (114) для соединения с цепью; секцию кожуха (156) для защиты свободного шкива и шкива управления уровнем от внешних воздействий; и средство (158) для регулировки натяжения путем перемещения блока управления натяжением цепи вперед или назад по отношению к электродвигателю (50) в зависимости от натяжения цепи (52).
Комментарии