Конвейер спутникового типа - SU1219317A1
Код документа: SU1219317A1
Чертежи
Описание
Изобретение относится к станкостроению , в частности к транспортным устройствам автоматических иний.
ЦеЛь изобретения - повышение точности позиционирования.
Поставленная цель достигается непосредственным конструированием спутников друг с другом и с толкателями , что исключает возможность непосредственного положения спутника на конвейере.
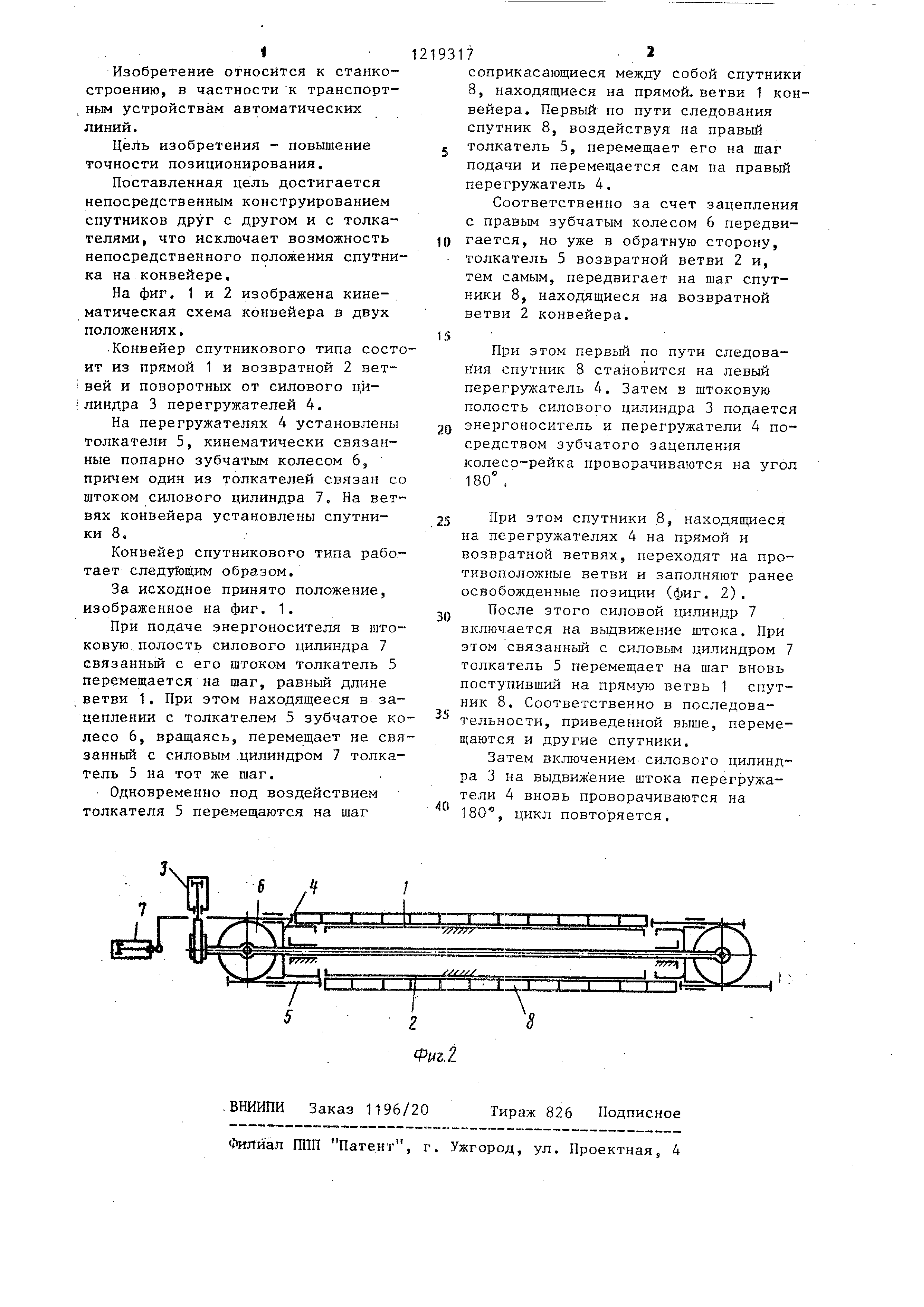
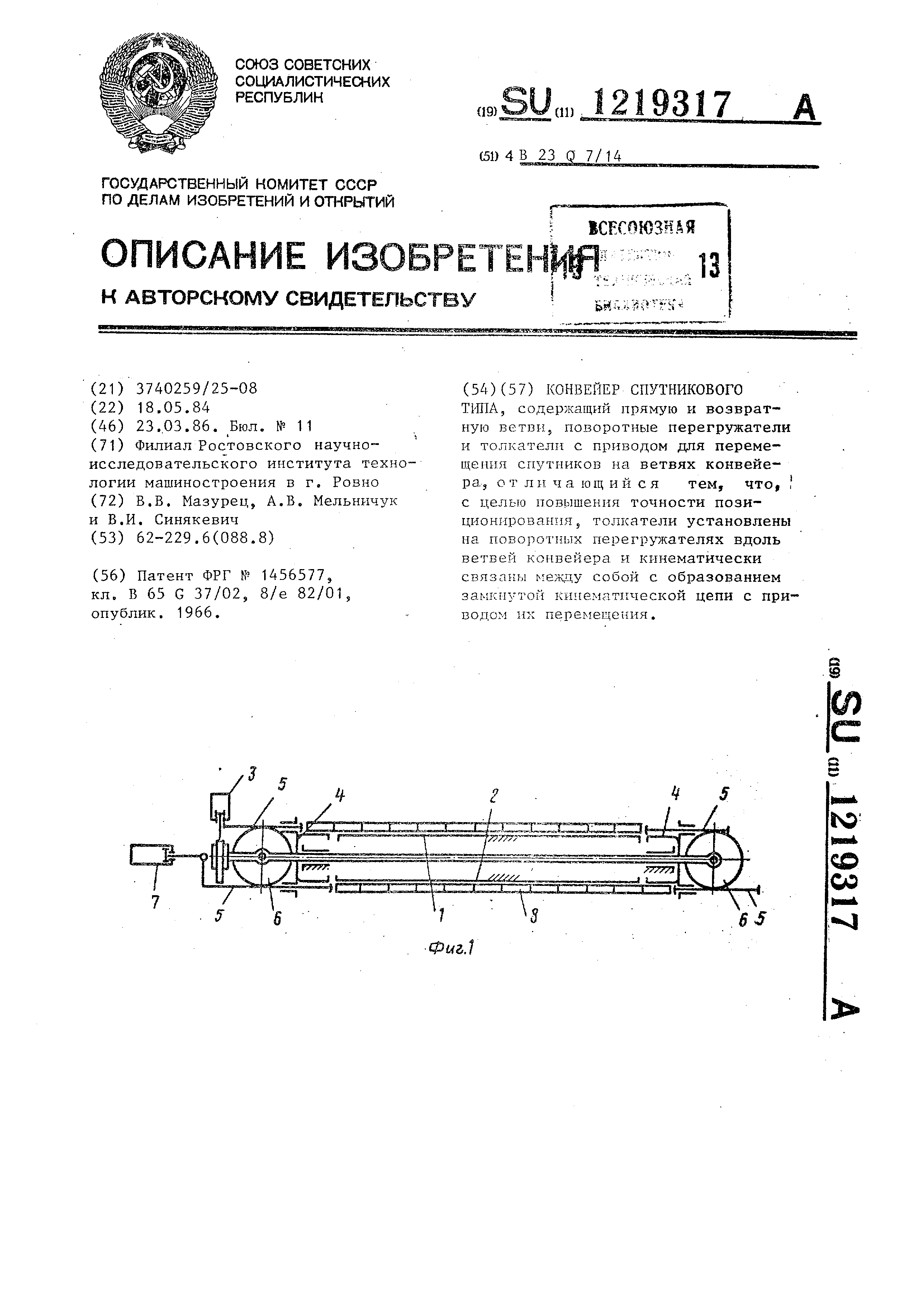
На фиг. 1 и 2 изображена кинематическая схема конвейера в двух положениях,
Конвейер спутникового типа состоит из прямой 1 и возвратной 2 вет- вей и поворотных от силового цй- линдра 3 перегружателей 4.
На перегружателях 4 установлены толкатели 5, кинематически связанные попарно зубчатым колесом 6, причем один из толкателей связан со штоком силового цилиндра 7. На ветвях конвейера установлены спутники 8.
Конвейер спутникового типа работает следу Ьщим образом.
За исходное принято положение, изображенное на фиг. 1.
При подаче энергоносителя в што- ковую полость силового цилиндра 7 связанньй с его штоком толкатель 5 перемещается на шаг, равный длине ветви 1. При этом находящееся в зацеплении с толкателем 5 зубчатое колесо 6, вращаясь, перемещает не связанный с силовым .цилиндром 7 толкатель 5 на тот же шаг.
Одновременно под воздействием толкателя 5 перемещаются на шаг
19317 . 2
соприкасающиеся между собой спутники 8, находящиеся на прямой, ветви 1 конвейера . Первый по пути следования спутник 8, воздействуя на правый 5 толкатель 5, перемещает его на шаг подачи и перемещается сам на правый перегружатель 4.
Соответственно за счет зацепления с правым зубчатым колесом 6 передви- 10 гается, но уже в обратную сторону, - толкатель 5 возвратной ветви 2 и, тем самым, передвигает на шаг спутники 8, находящиеся на возвратной ветви 2 конвейера.
При этом первьй по пути следова- н ия спутник 8 становится на левый перегружатель 4. Затем в штоковую полость силового цилиндра 3 подается энергоноситель и перегружатели 4 посредством зубчатого зацепления колесо-рейка проворачиваются на угол 180
При этом спутники 8, находящиеся на перегружателях 4 на прямой и возвратной ветвях, переходят на противоположные ветви и заполняют ранее освобожденные позиции (фиг. 2).
После этого силовой цилиндр 7 включается на вьщвижение штока. При этом связанньй с силовым цилиндром 7 толкатель 5 перемещает на шаг вновь поступивший на прямую ветвь 1 спутник 8. Соответственно в последовательности , приведенной выше, перемещаются и другие спутники.
Затем включением силового цилиндра 3 на выдвижение штока перегружатели 4 вновь проворачиваются на
180
, цикл повторяется.
Реферат
Формула
Комментарии