Термотерапевтическое устройство и способ управления этим устройством - RU2725967C1
Код документа: RU2725967C1
Чертежи








Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к термотерапевтическому устройству и способу управления этим устройством, а более конкретно к термотерапевтическому устройству, способному обеспечить желаемую интенсивность массажа при одном и том же давлении благодаря использованию датчика веса в соответствии с частью тела или с пользователем, и к способу управления этим устройством.
Уровень техники
Когда работа продолжается долго и непрерывно и при этом рабочая поза не только неправильная, но и длительно не меняется, например, когда человек долго глядит на монитор компьютера или вглядывается в экран смартфона, то нередко в мышцах и нервах шейно-воротниковой зоны возникают острые или хронические боли. Термотерапевтическое устройство используют для улучшения кровообращения или для уменьшения боли в мышцах путем стимуляции участка, причиняющего боль, в процессе термомассажа.
В термотерапевтическом устройстве интенсивность массажа зависит от давления, задаваемого высотой подъема и опускания керамического элемента, предназначенного для контакта с телом. Например, термотерапевтическое устройство обеспечивает более высокое давление, когда керамический элемент поднимают, в результате чего интенсивность массажа растет, и меньшее давление, когда керамический элемент опускают, в результате чего интенсивность массажа снижается.
Однако в обычном термотерапевтическом устройстве, поскольку высота подъема и опускания керамического элемента является одинаковой при заданной интенсивности массажа, давление, действующее на части тела, может быть различным в зависимости от типа телосложения пользователя. Соответственно, поскольку пользователь ощущает интенсивность массажа каждой части тела по-разному, то невозможно обеспечить строго одинаковую интенсивность массажа.
Кроме того, пользователь воспринимает интенсивность массажа, заданную как постоянную по величине, по-разному той или иной частью тела, и сильное массажное воздействие причиняет боль или снижает эффективность массажа.
Техническая проблема
Чтобы решить проблему этой традиционной технологии, один вариант осуществления настоящего изобретения представляет собой термотерапевтическое устройство, предназначенное для обеспечения одинакового давления для каждого пользователя или для каждой части тела пользователя с заданной интенсивностью массажа, и способ управления таким устройством.
Кроме того, настоящее изобретение представляет собой термотерапевтическое устройство, выполненное с возможностью распознавания пользователя по распределению давления, создаваемого его телом, и по типу его телосложения и с возможностью автоматического управления настройкой и реализацией массажа, а также предоставляет способ управления этим устройством.
Техническое решение
Один аспект настоящего изобретения относится к термотерапевтическому устройству, содержащему термокерамический модуль, который включает в себя корпус, первую опорную пластину, расположенную на корпусе, вторую опорную пластину, расположенную на первой опорной пластине, привод подъема и опускания, соединенный с нижней частью первой опорной пластины и выполненный с возможностью перемещения первой опорной пластины в вертикальном направлении на основании корпуса, и керамический элемент, соединенный со второй опорной пластиной; датчик веса, расположенный на нижней поверхности второй опорной пластины, для измерения давления, создаваемого телом пользователя; и контроллер, предназначенный для управления настройкой и реализацией режима массажа у термокерамического модуля, причем контроллер управляет высотой перемещения, обеспечиваемой приводом подъема и опускания, в соответствии с давлением, создаваемым телом пользователя и измеряемым датчиком веса, с целью обеспечения постоянного давления на пользователя через керамический элемент на основании предварительно заданной желаемой интенсивности.
Термотерапевтическое устройство может дополнительно включать в себя накопитель, хранящий информацию об исходной высоте, обеспечиваемой приводом подъема и опускания, в соответствии с желаемой интенсивностью, при этом контроллер может рассчитывать величину регулировки высоты перемещения в соответствии с измеренным давлением, создаваемым телом, на основании информации об исходной высоте, чтобы сохранить величину регулировки высоты перемещения в накопителе, и управлять высотой перемещения, обеспечиваемой приводом подъема и опускания, на основе величины регулировки высоты перемещения в соответствии с давлением, создаваемым телом и измеряемым датчиком веса.
Контроллер может определить, прошел ли предварительно заданный интервал времени без предварительно заданного изменения давления после того, как датчик веса зафиксировал значение давления выше первого исходного значения давления или равное ему, и управлять термокерамическим модулем так, чтобы автоматически происходил запуск режима массажа, если этот предварительно заданный интервал времени прошел.
Контроллер может определять, прошел ли предварительно заданный интервал времени после того, как датчик веса зафиксировал значение давления ниже второго исходного значения давления или равное ему при реализации режима массажа, и управлять термокерамическим модулем так, чтобы автоматически происходил приостанов режима массажа, если этот предварительно заданный интервал времени прошел.
Контроллер может определять, прошел ли предварительно заданный интервал времени после приостанова режима массажа, и управлять термокерамическим модулем так, чтобы автоматически происходило завершение режима массажа, если этот предварительно заданный интервал времени прошел.
Термотерапевтическое устройство может дополнительно содержать накопитель, хранящий информацию пользователя, включающую в себя тип телосложения, вес и пользовательскую информацию о настройках режима массажа, причем контроллер может сохранять в накопителе текущую информацию о настройках режима массажа как информацию пользователя, при завершении режима массажа у термокерамического модуля.
Термотерапевтическое устройство может дополнительно содержать двигатель горизонтального перемещения, выполненный с возможностью горизонтального перемещения термокерамического модуля; и накопитель, предназначенный для хранения информации о типе телосложения, соответствующей по меньшей мере одному из следующих показателей: распределение давления, создаваемого телом, и величина изменения тока двигателя горизонтального перемещения, причем контроллер может определять тип телосложения пользователя на основе информации о типе телосложения в соответствии с по меньшей мере одним из следующих показателей: распределение давления, создаваемого телом пользователя, на основании результата измерения, выполненного датчиком веса для некоторой части тела, и величина изменения тока двигателя горизонтального перемещения в соответствии с местом.
Информация пользователя, включающая в себя тип телосложения, вес и пользовательскую информацию о настройках режима массажа, может быть сохранена в накопителе, и контроллер может распознавать пользователя на основе информации пользователя в соответствии с выявленным типом телосложения пользователя и автоматически задавать режим массажа у термокерамического модуля в соответствии с информацией о настройках режима массажа для распознанного пользователя.
Другой аспект настоящего изобретения относится к способу управления термотерапевтическим устройством, содержащему задание режима массажа у термокерамического модуля, включающего в себя корпус, первую опорную пластину, расположенную на корпусе, вторую опорную пластину, расположенную на первой опорной пластине, привод подъема и опускания, соединенный с нижней частью второй опорной пластины и выполненный с возможностью перемещения первой опорной пластины в вертикальном направлении на основании корпуса, и керамический элемент, соединенный со второй опорной пластиной; измерение давления, создаваемого телом пользователя, при помощи датчика веса, расположенного на нижней поверхности второй опорной пластины; и управление реализацией режима массажа у термокерамического модуля, в процессе которого регулировка высоты перемещения, обеспечиваемая приводом подъема и опускания, происходит в соответствии с давлением, создаваемым телом пользователя и измеряемым датчиком веса, с целью обеспечения постоянного давления на пользователя через керамический элемент на основании предварительно заданной желаемой интенсивности.
Способ управления термотерапевтическим устройством может дополнительно включать в себя предоставление информации об исходной высоте, обеспечиваемой приводом подъема и опускания, в соответствии с желаемой интенсивностью, причем управление может включать в себя расчет величины регулировки высоты перемещения в соответствии с измеренным давлением, создаваемым телом, на основании информации об исходной высоте и управление высотой перемещения, обеспечиваемой приводом подъема и опускания, на основе величины регулировки высоты перемещения в соответствии с давлением, создаваемым телом и измеряемым датчиком веса.
Способ управления термотерапевтическим устройством может дополнительно включать в себя первую операцию определения, которая определяет, прошел ли предварительно заданный интервал времени без предварительно заданного изменения давления после того, как датчик веса зафиксировал значение давления выше первого исходного значения давления или равное ему; автоматический запуск режима массажа у термокерамического модуля, если этот предварительно заданный интервал времени прошел; вторую операцию определения, которая определяет, прошел ли предварительно заданный интервал времени после того, как датчик веса зафиксировал значение давления ниже второго исходного значения давления или равное ему при реализации режима массажа; автоматический приостанов режима массажа у термокерамического модуля, если этот предварительно заданный интервал времени прошел; третью операцию определения, которая определяет, прошел ли предварительно заданный интервал времени после приостанова режима массажа; и автоматическое завершение режима массажа у термокерамического модуля, если этот предварительно заданный интервал времени прошел.
Способ управления термотерапевтическим устройством может дополнительно включать в себя предоставление информации о типе телосложения, соответствующей по меньшей мере одному из следующих показателей: распределение давления, создаваемого телом, и величина изменения тока двигателя горизонтального перемещения, выполненного с возможностью горизонтального перемещения термокерамического модуля; измерение по меньшей мере одного из следующих показателей: давление, создаваемое телом, для части тела пользователя и изменение тока двигателя горизонтального перемещения в соответствии с местом; определение типа телосложения пользователя на основе информации о типе телосложения в соответствии с по меньшей мере одним из следующих показателей: распределение давления, создаваемого телом пользователя, на основании результата измерения, выполненного датчиком веса, и величина изменения тока двигателя горизонтального перемещения в соответствии с местом; распознавание пользователя на основе информации пользователя в соответствии с выявленным типом телосложения пользователя в случае, когда пользовательская информация, включающая в себя тип телосложения, вес и информацию о настройках режима массажа пользователя, сохранена заблаговременно при завершении режима предыдущего массажа; и автоматическое задание режима массажа у термокерамического модуля в соответствии с информацией о настройках режима массажа для распознанного пользователя.
Преимущества
Термотерапевтическое устройство и способ управления этим устройством в соответствии с одним вариантом осуществления настоящего изобретения могут обеспечивать массаж с одинаковой интенсивностью для каждой части тела независимо от типа телосложения или веса пользователя с предварительно заданной желаемой интенсивностью и, таким образом, могут максимизировать эффективность массажа, регулируя величину подъема и опускания керамического элемента для каждой части тела в зависимости от давления, создаваемого этой частью тела пользователя.
Кроме того, поскольку настоящее изобретение позволяет накапливать информацию об особенностях пользователя, такую как начало массажа, приостанов массажа, завершение массажа и т.п. в зависимости от давления, создаваемого телом пользователя, а затем автоматически выполнять массаж, то пользователь может выбрать режим массажа без каких-либо специальных манипуляций, что повышает комфортность использования данного устройства для пользователя.
Дополнительно, поскольку настоящее изобретение позволяет распознать пользователя в соответствии с распределением давления, создаваемого телом, и типом телосложения пользователя, сохранить информацию пользователя и затем использовать сохраненные настройки операции массажа для автоматической реализации настройки массажа при распознавании конкретного пользователя, то пользователь может выполнить настройку массажа без каких-либо специальных манипуляций, что дополнительно повышает комфортность использования данного устройства для пользователя.
Краткое описание чертежей
фиг. 1 представляет собой схематический вид в перспективе термотерапевтического устройства согласно одному варианту осуществления настоящего изобретения,
фиг. 2 представляет собой вид в перспективе термокерамического модуля с фиг. 1,
фиг. 3 показывает вид спереди состояния, в котором привод подъема и опускания перемещает опорную пластину вверх в термокерамическом модуле с фиг. 2,
фиг. 4 показывает вид спереди состояния, в котором привод подъема и опускания перемещает опорную пластину вниз в термокерамическом модуле с фиг. 2,
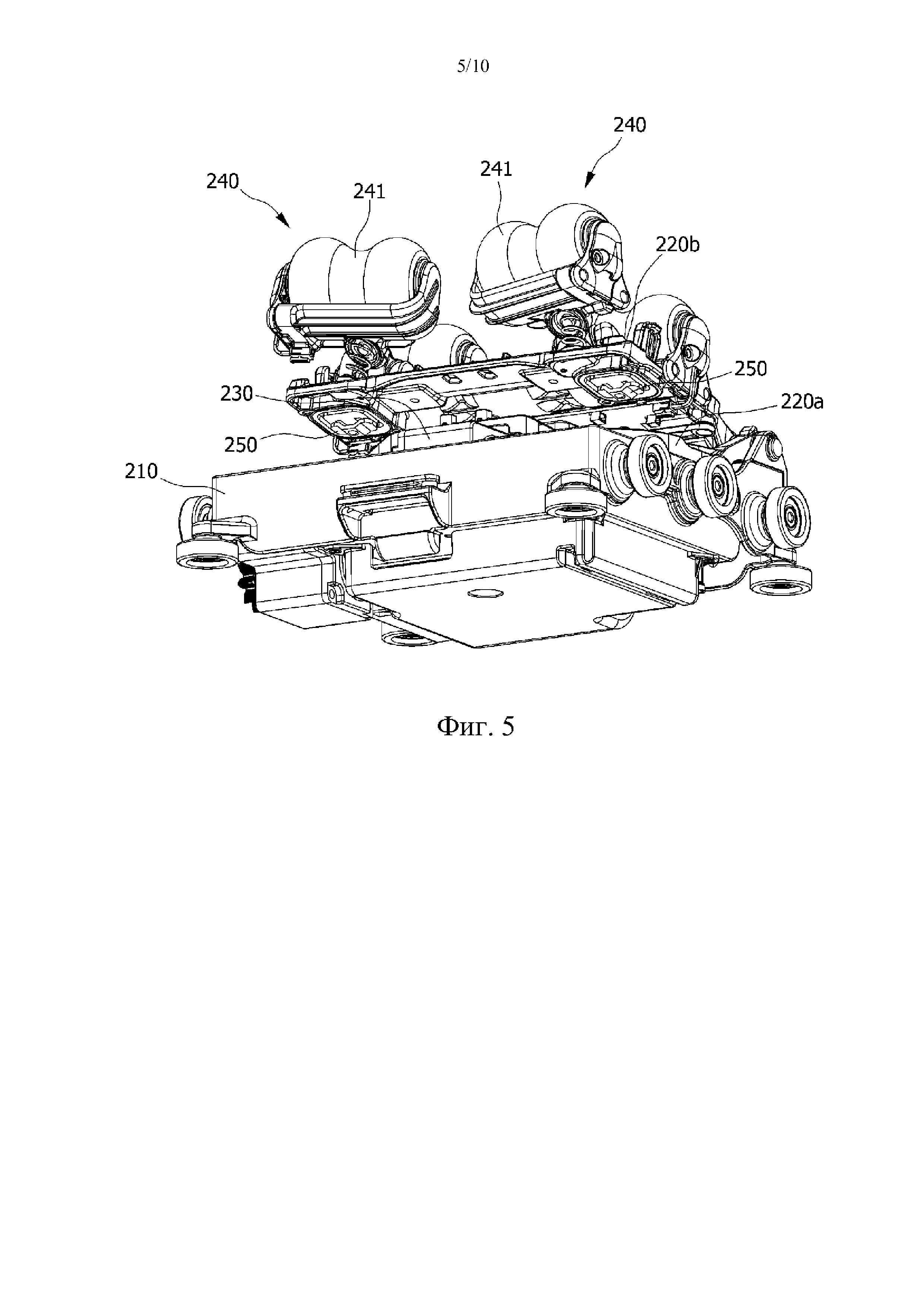
фиг. 5 представляет собой вид в перспективе первой опорной пластины и второй опорной пластины, если смотреть снизу, в состоянии, когда они отделены друг от друга в термокерамическом модуле с фиг. 2,
фиг. 6 представляет собой вид в перспективе первой опорной пластины и второй опорной пластины, если смотреть сверху, в состоянии, когда они отделены друг от друга в термокерамическом модуле с фиг. 2,
фиг. 7 показывает блок-схему, иллюстрирующую термотерапевтическое устройство в соответствии с вариантом осуществления настоящего изобретения,
фиг. 8 показывает более подробную блок-схему накопителя с фиг. 7,
фиг. 9 показывает блок-схему последовательности операций, иллюстрирующую способ управления термотерапевтическим устройством в соответствии с вариантом осуществления настоящего изобретения, и
фиг. 10 показывает блок-схему, иллюстрирующую один пример запуска режима массажа с фиг. 9.
Осуществление изобретения
Далее будут подробно описаны примерные варианты осуществления настоящего изобретения на основе прилагаемых чертежей, которые могут позволить специалисту в данной области техники легко осуществить настоящее изобретение. Настоящее изобретение может быть осуществлено в различных формах и не ограничивается приведенными далее вариантами осуществления. Компоненты, не относящиеся к описанию, опущены на чертежах, чтобы более четко описать настоящее изобретение, и одинаковые ссылочные обозначения используются для одинаковых или сходных компонентов в описании.
Далее термотерапевтическое устройство согласно одному варианту осуществления настоящего изобретения будет описано более подробно на основе чертежей. Фиг. 1 представляет собой схематический вид в перспективе термотерапевтического устройства согласно одному варианту осуществления настоящего изобретения.
Как показано на фиг. 1, термотерапевтическое устройство 10 представляет собой устройство, выполненное с возможностью выполнять массаж и термотерапию с использованием термокерамики на разных частях тела человека. Термотерапевтическое устройство 10 включает в себя верхний корпус 102, нижний корпус 104 и термокерамический модуль 200.
Верхний корпус 102 и нижний корпус 104 могут быть расположены параллельно. В дальнейшем, направление, в котором верхний корпус 102 и нижний корпус 104 расположены параллельно, будет называться первым направлением 12. Если смотреть сверху, направление, перпендикулярное первому направлению 12, будет называться вторым направлением 14. Направление, перпендикулярное как первому направлению 12, так и второму направлению 14, будет называться третьим направлением 16.
Верхний корпус 102 имеет внутри пустое пространство. Термокерамический модуль 200 может быть размещен в этом пустом пространстве в верхнем корпусе 102. На верхней поверхности верхнего корпуса 102 могут быть участки, на которых может лежать человек. Верхняя поверхность верхнего корпуса 102 может быть выполнена так, чтобы она была больше поверхности спины человека.
Нижний корпус 104 можно перемещать относительно верхнего корпуса 102 скольжением так, чтобы он перекрывал некоторую верхнюю зону верхнего корпуса 102 или располагался параллельно верхнему корпусу 102.
Термокерамический модуль 200 может выполнять массаж и термотерапию для любой части тела человека. Термокерамический модуль 200 можно перемещать в верхнем корпусе 102 вдоль первого направления 12 с помощью транспортера 115 и двигателя 110 горизонтального перемещения, предназначенного для приведения в действие транспортера 115.
Соответственно, термокерамический модуль 200 может быть выполнен с возможностью перемещения во внутреннем пространстве верхнего корпуса 102, чтобы выполнять термотерапию для той или иной части тела человека. Например, когда человек лежит на термокерамическом модуле 200, этот термокерамический модуль 200 может выполнять термотерапию в области спины или шеи.
Фиг. 2 показывает вид в перспективе термокерамического модуля с фиг. 1, фиг. 3 показывает вид спереди состояния, в котором привод подъема и опускания перемещает опорную пластину вверх в термокерамическом модуле с фиг. 2, фиг. 4 показывает вид спереди состояния, в котором привод подъема и опускания перемещает опорную пластину вниз в термокерамическом модуле с фиг. 2, фиг. 5 показывает вид в перспективе первой опорной пластины и второй опорной пластины, если смотреть снизу, в состоянии, когда они отделены друг от друга в термокерамическом модуле с фиг. 2, и фиг. 6 показывает вид в перспективе первой опорной пластины и второй опорной пластины, если смотреть сверху, в состоянии, когда они отделены друг от друга в термокерамическом модуле с фиг. 2.
Как показано на фиг. 2-6, термокерамический модуль 200 может включать в себя корпус 210, опорную пластину 220, привод 230 подъема и опускания, керамические элементы 240, датчики 250 веса и керамические приводные элементы 260.
Корпус 210 может иметь пустое пространство и шестигранную форму. Корпус 210 здесь имеет форму, в которой верхняя часть открыта, но это не ограничивает предмет изобретения, и форма может быть различной.
Корпусные опоры 211, соединенные с опорной пластиной 220, могут быть выполнены в корпусе 210 так, что опорная пластина 220 имеет возможность поворота и перемещения вверх.
Пара корпусных опор 211 может быть предусмотрена на верхней поверхности корпуса 210 и выполнена с возможностью входить внутрь корпуса 210. Пара корпусных опор 211 может быть расположена на расстоянии друг от друга вдоль второго направления 14. Каждая из корпусных опор 211 может быть расположена на заднем конце первого направления 12 каждого из керамических элементов 240, что будет описано ниже.
Опорная пластина 220 расположена на верхней стороне третьего направления 16 корпуса 210 и включает в себя первую опорную пластину 220а и вторую опорную пластину 220b. Здесь первая опорная пластина 220а может быть расположена под второй опорной пластиной 220b и присоединена к приводу подъема и опускания 230, а керамические элементы 240 могут быть соединены со второй опорной пластиной 220b.
Кроме того, опорная пластина 220 может иметь опорные рычаги 221, соединенные с корпусными опорами 211. Когда опорная пластина 220 идет вверх, каждый из опорных рычагов 221 может действовать как поворотный вал для обеспечения движения опорной пластины 220 вверх. Пара опорных рычагов 221 может быть сформирована и расположена на заднем конце первого направления 12 опорной пластины 220.
Здесь как первая опорная пластина 220а, так и вторая опорная пластина 220b могут иметь опорные рычаги 221. В этом случае первая опорная пластина 220а имеет возможность поворота вокруг опорных рычагов 221 при перемещении вверх приводом 230 подъема и опускания. Дополнительно, вторая опорная пластина 220b также может иметь возможность поворота вокруг опорных рычагов 221 и, таким образом, может быть расположена на расстоянии от первой опорной пластины 220а.
В этом случае первая опорная пластина 220а может содержать нажимные элементы 222, соответствующие датчикам веса 250, которые будут описаны ниже, на обеих сторонах ее поверхности, обращенной ко второй опорной пластине 220b.
Дополнительно, первая опорная пластина 220а может иметь выступ 224 на ее центральной части, а вторая опорная пластина 220b может иметь сквозное отверстие 225 в месте, соответствующем выступу 224. При этом выступ 224 может входить в сквозное отверстие 225. В этом случае выступ 224 может иметь резьбовое отверстие в центре выступа, чтобы иметь возможность вставить в это отверстие соединительный элемент.
Соответственно, когда соединительный элемент (не показан) вставлен в выступ 224 в состоянии, в котором выступ 224 введен в сквозное отверстие 225, первая опорная пластина 220а и вторая опорная пластина 220b могут быть зафиксированы.
Привод 230 подъема и опускания может перемещать опорную пластину 220 в третьем направлении 16, которое является вертикальным направлением на основании корпуса 210. Привод 230 подъема и опускания может быть расположен во внутреннем пространстве корпуса 210 и соединен с опорной пластиной 220.
Например, привод 230 подъема и опускания может перемещать опорную пластину 220 в третьем направлении 16 с помощью шестерни, но без ограничения этим, и привод может быть реализован с помощью цилиндрической конструкции, способной вертикально перемещать опорную пластину 220, или с помощью других устройств.
Керамические элементы 240 могут контактировать с телом человека для выполнения массажа и термотерапии. Каждый из керамических элементов 240 может быть соединен с опорной пластиной 220 и содержит множество термокерамических роликов 241 и 242.
Каждый из множества термокерамических роликов 241 и 242 может включать в себя источник нагрева, вырабатывающий тепло. Здесь источником нагрева может быть лампа, способная генерировать свет и тепло, проводник с положительным температурным коэффициентом (РТС), нагреваемый провод, электрический нагревательный провод и т.п., но без ограничения этим, и могут быть различные конфигурации, способные генерировать только тепло или как свет, так и тепло.
Каждый из множества термокерамических роликов 241 и 242 может иметь наружную поверхность изогнутой формы. Например, у каждого из множества термокерамических роликов 241 и 242 обе стороны могут иметь сферическую форму, а центральная часть может иметь цилиндрическую форму, и, таким образом, керамические элементы 240 могут быть в целом подобны гантели, но без ограничения этим, и могут быть реализованы различные формы, имеющие изогнутую наружную поверхность.
Множество термокерамических роликов 241 и 242 может включать в себя по меньшей мере два первых термокерамического ролика 241 спереди и два вторых термокерамического ролика 242 сзади вдоль первого направления 12. Первые термокерамические ролики 241 и вторые термокерамические ролики 242 могут быть расположены разнесенными отдельно друг от друга вдоль второго направления 14 на предварительно заданном расстоянии.
Первые термокерамические ролики 241 и вторые термокерамические ролики 242 расположены на опорной пластине 220 и могут быть перемещены к верхней стороне третьего направления 16, когда привод 230 подъема и опускания перемещает опорную пластину 220 к верхней стороне третьего направления 16.
Дополнительно, первые термокерамические ролики 241 могут быть перемещены к верхней стороне третьего направления 16 посредством керамических приводных элементов 260. Это значит, что первые термокерамические ролики 241 могут быть перемещены к верхней стороне или нижней стороне третьего направления 16 только под действием керамических приводных элементов 260 независимо от перемещения опорной пластины 220.
Вторые термокерамические ролики 242 имеют возможность опирания на керамическую опору 243. В этом случае керамическая опора 243 может быть расположена на нижней стороне третьего направления 16 второго термокерамического ролика 242 и соединена с обеими боковыми поверхностями второго термокерамического ролика 243 для поддержки нижней части второго термокерамического ролика 242.
Датчики веса 250 предусмотрены в местах, соответствующих нажимным элементам 222 первой опорной пластины 220а, на обеих сторонах нижней поверхности второй опорной пластины 220b. Когда нагрузка действует на каждый из керамических элементов 240, т.е. когда керамические элементы 240 контактируют с телом пользователя и, таким образом, усилие действует на каждый из керамических элементов 240, то датчик 250 веса может определять давление, создаваемое телом пользователя.
Керамические приводные элементы 260 могут перемещать первые термокерамические ролики 241 во втором направлении 14, в то же время перемещая первые термокерамические ролики 241 в третьем направлении 16. Это значит, что керамические приводные элементы 260 могут перемещать пару первых термокерамических роликов 241 в диагональном направлении в плоскости, образованной вторым направлением 14 и третьим направлением 16.
Термотерапевтическое устройство 10 согласно варианту осуществления настоящего изобретения может использовать датчики 250 веса для обеспечения массажа при одном и том же давлении для некоторой части тела или некоторого пользователя. Это значит, что регулируя высоту перемещения, обеспечиваемую приводом 230 подъема и опускания для некоторой части тела или некоторого пользователя при желаемой интенсивности массажа, термотерапевтическое устройство 10 может обеспечивать давление так, чтобы каждый пользователь ощущал одинаковое давление.
Далее конфигурация для регулировки высоты перемещения, обеспечиваемой приводом 230 подъема и опускания, с использованием датчиков 250 веса будет описана со ссылками на фиг. 7 и 8. Фиг. 7 показывает блок-схему, иллюстрирующую термотерапевтическое устройство в соответствии с вариантом осуществления настоящего изобретения, а фиг. 8 показывает вид, иллюстрирующий подробную блок-схему накопителя с фиг. 7.
Термотерапевтическое устройство 10 в соответствии с одним вариантом осуществления настоящего изобретения включает в себя контроллер 120, выполненный с возможностью управления вышеописанным двигателем 110 горизонтального перемещения, привод 230 подъема и опускания, входящий в термокерамический модуль 200, и керамические элементы 240, использующие датчики 250 веса, и накопитель 130. В данном случае контроллер 120 может извлекать информацию для управления из накопителя 130 или сохранять информацию о настройках текущего режима массажа в накопителе 130.
Контроллер 120 управляет настройкой и выполнением режима массажа у термокерамического модуля 200. Это значит, что контроллер 120 управляет приводом 230 подъема и опускания так, чтобы выполнять массаж керамическими элементами 240 при перемещении термокерамического модуля 200, управляя двигателем 110 горизонтального перемещения в соответствии с настройкой пользователя или автоматической настройкой посредством распознавания пользователя, которое будет описано ниже.
В этом случае контроллер 120 может управлять высотой перемещения, обеспечиваемой приводом 230 подъема и опускания, в соответствии с давлением, создаваемым телом пользователя и измеряемым датчиками 250 веса, на основании предварительно заданной желаемой интенсивности. В этом случае, поскольку давление, создаваемое телом пользователя, является разным для каждой части тела в соответствии с типом телосложения пользователя, когда управление высотой перемещения, обеспечиваемой приводом 230 подъема и опускания, происходит так, чтобы эта высота была равномерной в соответствии с желаемой интенсивностью, то давление, создаваемое телом и ощущаемое пользователем для каждой части тела, изменяется, и, таким образом, в настоящем изобретении контроллер 120 может создать для пользователя одинаковое давление для каждой части тела путем регулировки высоты перемещения, обеспечиваемой приводом 230 подъема и опускания.
С этой целью контроллер 120 может управлять высотой перемещения, обеспечиваемой приводом 230 подъема и опускания, используя величину регулировки высоты перемещения в соответствии с давлением, создаваемым телом и измеряемым датчиками 250 веса, на основании информации об исходной высоте, обеспечиваемой приводом 230 подъема и опускания, заданной первоначально для получения желаемой интенсивности. Здесь информацией об исходной высоте может быть информация о высоте перемещения, обеспечиваемой приводом 230 подъема и опускания, в соответствии с желаемой интенсивностью, а информацией о регулировке высоты перемещения может быть величина, предварительно рассчитанная для давления, создаваемого телом, в соответствии с типом телосложения пользователя, полученная сканированием при конкретной желаемой интенсивности, как описано ниже. Это значит, что контроллер 120 может изменять высоту перемещения в соответствии с желаемой интенсивностью для давления, создаваемого телом, в соответствии с типом телосложения пользователя для расчета величины регулировки высоты перемещения.
Например, на основании исходной высоты в соответствии с желаемой интенсивностью высота перемещения может быть увеличена и уменьшена в соответствии с давлением, создаваемым телом, для каждого позвонка - шейного, грудного, поясничного и крестцового - в соответствии с типом телосложения пользователя, выявленным при сканировании. В этом случае, при уменьшении высоты перемещения, обеспечиваемой приводом 230 подъема и опускания, для каждого из грудных позвонков и крестцовых позвонков, на которые действует относительно высокое давление, создаваемое телом, когда опорная пластина 220 опускается, керамические элементы 240 также могут быть опущены, чтобы уменьшить это давление, и, таким образом, давление, ощущаемое пользователем, может быть уменьшено.
Далее, при увеличении высоты перемещения, обеспечиваемой приводом 230 подъема и опускания, для каждого из шейных позвонков и поясничных позвонков, на которые действует относительно низкое давление, создаваемое телом, когда опорная пластина 220 поднимается, керамические элементы 240 также могут быть подняты, чтобы увеличить это давление, и, таким образом, давление, ощущаемое пользователем, может быть увеличено.
Как описано выше, термотерапевтическое устройство 10 может управлять процессом так, чтобы давление, создаваемое керамическими элементами 240, было одинаковым для всех частей тела независимо от типа телосложения или веса, путем регулировки высоты перемещения, обеспечиваемой приводом 230 подъема и опускания, в соответствии с давлением, создаваемым телом, которое является разным для каждой части тела одного и того же пользователя, и, соответственно, пользователь может получать массаж при одном и том же давлении.
Далее, даже в случае разных пользователей, в частности, пользователей, имеющих одинаковый тип телосложения, но разный вес, термотерапевтическое устройство 10 может предоставить пользователям массаж с одинаковым давлением, изменяя высоту перемещения, обеспечиваемую приводом 230 подъема и опускания, в соответствии с давлением тела пользователя.
Дополнительно контроллер 120 может определить, готов ли пользователь к массажу, в соответствии с результатом измерения, выполненного датчиками 250 веса, и управлять термокерамическим модулем 200 так, чтобы запуск режима массажа происходил автоматически.
Например, контроллер 120 может определить, прошел ли предварительно заданный интервал времени без предварительно заданного изменения давления после того, как датчик 250 веса зафиксировал значение давления выше первого исходного значения давления или равное ему, и может определить, что пользователь лежит на термотерапевтическом устройстве 10 и ждет запуска массажа, если этот предварительно заданный интервал времени прошел.
В случае, когда значение давления выше первого исходного значения давления или равно ему, но изменяется, контроллер 120 может обнулить прошедшее время. Например, в ситуации, когда пользователь лежит на термотерапевтическом устройстве 10 и, таким образом, датчики 250 веса фиксируют значение давления выше первого исходного значения давления или равное ему, но при этом пользователь не готов к массажу из-за своего перемещения в позицию массажа, контроллер 120 может обнулить прошедшее время. Это значит, что контроллер 120 определяет, прошел ли заданный интервал времени, только когда значение давления выше первого исходного значения давления или равно ему и не меняется.
В результате, контроллер 120 определяет, что пользователь готов к массажу, только когда состояние, в котором значение давления выше первого исходного значения давления или равно ему и не изменяется, сохраняется в течение предварительно заданного времени.
Здесь первым исходным давлением может быть давление, действующее, когда пользователь, как известно, находится на верхнем корпусе 102, находящемся в состоянии, когда термокерамический модуль 200 расположен на одной стороне в верхнем корпусе 102, перед тем как у термокерамического модуля 200 запущен режим массажа.
В этом случае контроллер 120 может управлять двигателем 110 горизонтального перемещения, приводом 230 подъема и опускания и керамическими элементами 240 в соответствии с режимом, заданным для автоматического запуска режима массажа у термокерамического модуля 200.
Далее, контроллер 120 может определить, желает ли пользователь прекратить массаж, в соответствии с результатом измерения, выполненным датчиками 250 веса, в то время как термокерамический модуль 200 отрабатывает режим массажа, и контроллер может управлять термокерамическим модулем 200 так, чтобы режим массажа был автоматически приостановлен.
Например, контроллер 120 может определить, что пользователь встает с термотерапевтического устройства 10 во время массажа, когда прошел предварительно заданный интервал времени после того, как датчики 250 веса зафиксировали значение давления ниже второго исходного значения давления или равное ему.
В этом случае вторым исходным давлением является давление, действующее, когда пользователь, как известно, сошел с верхнего корпуса 102, находящегося в состоянии, когда термокерамический модуль 200 перемещают в верхнем корпусе 102, в то время как у термокерамического модуля 200 действует режим массажа, и значение второго исходного давления может быть, например, ниже значения первого исходного давления или равно ему. Однако второе исходное давление не ограничено этим значением и может иметь значение выше значения первого исходного давления.
В этом случае контроллер 120 может прекратить управление двигателем 110 горизонтального перемещения, приводом 230 подъема и опускания и керамическими элементами 240, в результате чего режим массажа у термокерамического модуля 200 будет автоматически приостановлен.
Далее, контроллер 120 может сохранить в памяти накопителя 130 данные о местонахождении той части тела, на которой массаж был остановлен. Таким образом, на основании этого местонахождения и давления, создаваемого телом и измеренного в месте, в котором массаж был приостановлен, контроллер 120 может определить часть тела, соответствующую распределению давления, создаваемого телом, в соответствии с типом телосложения пользователя, распознанным при сканировании, и сохранить в памяти накопителя это место на определенной части тела как место предыдущего массажа.
В этом случае при возобновлении массажа после приостанова контроллер 120 может управлять термокерамическим модулем 200 так, чтобы продолжить массаж с той части тела, на которой массаж был приостановлен, на основании информации о позиции, сохраненной в накопителе перед приостановом массажа. Это значит, что, если позиция пользователя была изменена в процессе после приостанова выполнения массажа, т.е. если пользователь выходит из термотерапевтического устройства 10 или приподнимается, а затем снова ложится, то положение позвонков станет иным, и, следовательно, распределение давления, создаваемого телом, может быть изменено, из-за чего пользователь может почувствовать себя некомфортно, если массаж будет продолжен в соответствии с настройкой ранее отрегулированной высоты перемещения.
Соответственно, контроллер 120 может управлять термокерамическим модулем 200 так, чтобы при возобновлении массажа найти требуемую часть тела и продолжить массаж с этой части тела. В этом случае, поскольку термокерамический модуль 200 переходит в то место, в котором давление, создаваемое телом, соответствует той части тела, на которой массаж был приостановлен, контроллер 120 может снова начать выполнять массаж так, как это было при предыдущем массаже.
Далее, в состоянии, в котором термокерамический модуль 200 приостановил выполнение режима массажа, контроллер 120 может определить, желает ли пользователь завершить массаж, по тому, прошло ли предварительно заданное время, и управлять термокерамическим модулем 200 так, чтобы режим массажа был автоматически завершен.
Например, контроллер 120 может определить, что пользователь желает сам завершить режим массажа, если прошло предварительно заданное время после того, как режим массажа был приостановлен.
В этом случае контроллер 120 может прекратить управление двигателем 110 горизонтального перемещения, приводом 230 подъема и опускания и керамическим элементом 240, в результате чего режим массажа у термокерамического модуля 200 будет автоматически завершен.
Далее, контроллер 120 может сохранять информацию о настройках текущего режима массажа в накопителе 130 как пользовательскую информацию после завершения режима массажа у термокерамического модуля 200. В этом случае контроллер 120 может управлять информацией 132 пользователя, хранящейся в накопителе 130, так, что будет происходить обновление этой информации 132 пользователя в соответствии с информацией о настройках текущего режима массажа. В данном случае информация о настройках текущего режима массажа может включать в себя, в конечном счете, информацию о режиме, информацию о температуре и информацию об интенсивности.
Соответственно, поскольку массаж может быть выполнен автоматически без специальных манипуляций со стороны пользователя для запуска, приостанова и завершения массажа и постоянно может идти обновление информации предыдущего режима массажа, то комфортность для пользователя может быть повышена.
Далее, контроллер 120 может определить тип телосложения пользователя в соответствии с по меньшей мере одним показателем из следующих: распределение давления, создаваемого телом пользователя, по результатам измерения, выполненного датчиками 250 веса, и величина изменения тока двигателя 110 горизонтального перемещения. В данном случае, в процессе, при котором термокерамический модуль 200 перемещают во время массажа, по тому, как усилие, действующее со стороны тела пользователя на термокерамический модуль 200, изменяется в соответствии с местоположением позвонков пользователя, контроллер 120 может определить тип телосложения пользователя, такой как длина позвонков или тому подобное, в соответствии с распределением давления, создаваемого телом пользователя.
Кроме того, поскольку величина изменения тока двигателя 110 горизонтального перемещения увеличивается, когда усилие, действующее на термокерамический модуль 200, растет, и уменьшается, когда это усилие снижается, контроллер 120 может определить тип телосложения пользователя, такой как длина позвонков или тому подобное, в соответствии с величиной изменения тока двигателя 110 горизонтального перемещения.
В этом случае контроллер 120 может определить тип телосложения пользователя на основе информации о типе телосложения в соответствии с по меньшей мере одним показателем из следующих: распределение давления, создаваемого телом пользователя, для каждой части тела и величина изменения тока двигателя 110 горизонтального перемещения. В данном случае информация о типе телосложения может быть информацией, предварительно полученной путем классификации по меньшей мере одного показателя из следующих: распределение давления, создаваемого телом пользователя, для каждой части тела и величина изменения тока двигателя 110 горизонтального перемещения в соответствии со стандартной информацией о позвонках.
Далее, когда информация 132 пользователя о предыдущем использовании термотерапевтического устройства 10 сохранена, контроллер 120 может распознать текущего пользователя в соответствии с выявленным типом телосложения пользователя.
Операции по определению типа телосложения пользователя и распознаванию пользователя могут быть выполнены сразу же при запуске режима массажа у термокерамического модуля 200. В этом случае, если пользователь впервые использует термотерапевтическое устройство 10 или если информация 132 пользователя не была ранее сохранена, то тип телосложения пользователя может быть сохранен в информации 132 пользователя.
Далее, если пользователь был распознан перед выполнением режима массажа, то контроллер 120 может автоматически задать режим массажа у термокерамического модуля 200 на основе информации 132 пользователя, сохраненной в накопителе 130, в соответствии с пользовательской информацией о настройках режима массажа. В данном случае информация о настройках режима массажа может включать в себя температуру, интенсивность и схему массажа.
Соответственно, поскольку термотерапевтическое устройство 10 может распознать пользователя в соответствии со сканированием тела перед выполнением массажа и автоматически установить для режима массажа предварительно заданный режим массажа без специальных манипуляций со стороны пользователя, то комфортность для пользователя может быть дополнительно повышена.
Информация 132 пользователя, информация 134 о регулировке высоты перемещения и информация 136 о типе телосложения может быть сохранена в накопителе 130.
Информация 132 пользователя может включать в себя тип телосложения, вес и пользовательскую информацию о настройках режима массажа. В данном случае информация о настройках режима массажа может включать в себя, в конечном счете, информацию о режиме, информацию о температуре и информацию об интенсивности. Если пользователь, использующий термотерапевтическое устройство 10, зарегистрирован, то обновление информации 132 пользователя может происходить каждый раз при завершении использования термотерапевтического устройства 10.
Как описано выше, информация 134 о регулировке высоты перемещения может включать в себя информацию об исходной высоте, обеспечиваемой приводом 230 подъема и опускания, и величину регулировки высоты перемещения в соответствии с давлением, создаваемым телом и измеряемым на основании информации об исходной высоте.
Информацией 136 о типе телосложения может быть информация о типе телосложения, соответствующая по меньшей мере одному показателю из следующих: распределение давления, создаваемого телом, и величина изменения тока двигателя 110 горизонтального перемещения. В данном случае информацией о типе телосложения может быть информация о позвонках, такая как длина позвонков, в соответствии с распределением давления, создаваемого телом, и величине изменения тока двигателя 110 горизонтального перемещения или аналогичное, классифицированное в соответствии со стандартной информацией о позвонках.
Далее способ управления термотерапевтическим устройством в настоящем изобретении будет подробно описан ниже со ссылками на фиг. 9 и 10. Фиг. 9 показывает блок-схему последовательности операций, иллюстрирующую способ управления термотерапевтическим устройством в соответствии с вариантом осуществления настоящего изобретения.
Способ 300 для управления термотерапевтическим устройством в соответствии с вариантом осуществления настоящего изобретения включает в себя задание режима массажа (S301), автоматический запуск режима массажа при измерении давления с помощью датчиков 250 веса (S302-S305), обеспечение равномерного давления в соответствии с желаемой интенсивностью (S306) и автоматический приостанов или автоматическое завершение режима массажа (S307-S312).
Более подробно, как показано на фиг. 9, режим массажа у термокерамического модуля 200 может быть сначала установлен автоматически или вручную (S301). В этом случае, если пользователь использует термотерапевтическое устройство 10 впервые или если пользовательские настройки не были установлены ранее, то пользователь может непосредственно задать режим массажа.
Кроме того, может быть измерено давление, создаваемое телом, действующее на датчики 250 веса (S302). В этом случае, когда керамические элементы 240 контактируют с телом пользователя и, таким образом, на них действует вес тела пользователя, датчики 250 веса могут воспринимать нагрузку и в результате измерять давление, создаваемое телом пользователя.
Дополнительно при этом происходит определение, является ли измеренное значение давления, создаваемого телом, выше значения первого исходного давления или равно ему (S303), и, если значение давления, создаваемого телом, выше значения первого исходного давления или равно ему, то принимается, что пользователь не находится на термотерапевтическом устройстве 10, и термотерапевтическое устройство 10 ждет, когда значение давления, создаваемого телом, не станет выше значения первого исходного давления или равно ему.
Если на этапе S303 выявлено, что измеренное значение давления, создаваемого телом, выше значения первого исходного давления или равно ему, то происходит определение, прошел ли предварительно заданный интервал времени без предварительно заданного изменения давления (S304), и, если этот предварительно заданный интервал времени прошел не в состоянии, в котором измеренное значение давление, создаваемое телом, выше значения первого исходного давления или равно ему, то принимается, что пользователь не готов к началу массажа, и термотерапевтическое устройство 10 находится в режиме ожидания, пока указанное условие не будет выполнено.
В этом случае, если значение давления выше значения первого исходного давления или равно ему, но это значение меняется, то прошедшее время может быть обнулено. Например, в ситуации, когда пользователь лежит на термотерапевтическом устройстве 10, и, таким образом, датчики веса фиксируют значение давления больше первого исходного значения давления или равное ему, но при этом пользователь не готов к массажу из-за своего перемещения в позицию массажа, прошедшее время может быть обнулено. Это значит, что решение, прошел ли предварительно заданный интервал времени, может быть принято, только если значение давления выше значения первого исходного давления или равно ему и не меняется.
При определении на этапе S304, что предварительно заданный интервал времени прошел без предварительно заданного изменения давления в состоянии, в котором значение давления, создаваемого телом, было выше значения первого исходного давления или равно ему, может быть принято, что пользователь готов к массажу, и режим массажа у термокерамического модуля 200 может быть запущен (S305).
При этом, если значение давления выше значения первого исходного давления или равно ему и меняется, так как прошедшее время было обнулено, то может быть принято, что пользователь готов к массажу, только если состояние, в котором значение давления выше значения первого исходного давления или равно ему и не меняется, сохраняется в течение предварительно заданного времени.
В этом случае, если пользовательская настройка сохранена, как описано ниже со ссылкой на фиг. 10, то в результате сканирования тела пользователя может быть выполнена регулировка высоты перемещения в соответствии с заданной желаемой интенсивностью.
Далее, поскольку привод 230 подъема и опускания может поднимать и опускать опорную пластину 220 в соответствии с заданной желаемой интенсивностью, в то время как привод двигателя 110 горизонтального перемещения перемещает горизонтально термокерамический модуль 200 в верхнем корпусе 102, керамические элементы 240 могут массажировать тело пользователя.
Как описано выше, благодаря управлению высотой перемещения, обеспечиваемой приводом 230 подъема и опускания, использующему величину регулировки высоты перемещения в соответствии с давлением, создаваемым телом пользователя и измеряемым датчиками 250 веса, на основании предварительно заданной желаемой интенсивности в процессе выполнения режима массажа у термокерамического модуля 200, может быть обеспечено постоянное давление с желаемой интенсивностью (S306).
В этом случае высоту перемещения, обеспечиваемую приводом 230 подъема и опускания, для каждой части тела можно регулировать на основе величины регулировки высоты перемещения, рассчитанной в соответствии с давлением, создаваемым телом и измеряемым датчиками 250 веса при сканировании тела пользователя. Здесь информация об исходной высоте, обеспечиваемой приводом 230 подъема и опускания для желаемой интенсивности, и информация 134 о регулировке высоты перемещения в соответствии с давлением, создаваемым телом и измеряемым на основании информации об исходной высоте, могут быть заранее сохранены в накопителе 130 для дальнейшего использования.
Как описано выше, регулируя высоту перемещения, обеспечиваемую приводом 230 подъема и опускания, в соответствии с давлением, зависящим от части тела пользователя, можно осуществлять массаж при одинаковом давлении для каждой части тела.
Кроме того, датчики 250 веса определяют, стало ли значение давления ниже второго исходного значения давления или равно ему (S307), и, если значение давления выше второго исходного значения давления или равно ему, то принимается, что пользователь желает продолжать массаж, в результате чего выполнение предыдущего режима массажа будет идти, пока при измерении давления не будет получено значение давления ниже второго исходного значения давления или равное ему.
После определения на этапе S307, если датчики 250 веса регистрируют, что значение давления ниже второго исходного значения давления или равно ему, определяют, прошел ли предварительно заданный интервал времени (S308), и, если предварительно заданный интервал времени в состоянии, в котором измеренное значение давления, создаваемого телом, ниже второго исходного значения давления или равно ему, не прошел, то может быть принято, что пользователь желает только временно изменить позицию и затем продолжить массаж, и, таким образом, режим массажа может продолжаться, пока указанное условие не будет выполнено.
При определении на этапе S308, что предварительно заданный интервал времени в состоянии, в котором измеренное значение давления, создаваемого телом, ниже второго исходного значения давления или равно ему, прошел, то может быть принято, что пользователь желает сам остановить или приостановить массаж, и, таким образом, режим массажа может быть автоматически приостановлен (S309).
В этом случае пользователь может сохранить в памяти накопителя 130 на термотерапевтическом устройстве 10 данные о местонахождении той части тела, на которой массаж был остановлен. Таким образом, на основании давления, создаваемого телом и измеренного в месте, в котором массаж был приостановлен, может быть определено местонахождение части тела, соответствующей распределению давления, создаваемого телом, в соответствии с типом телосложения пользователя, распознанным при сканировании, и затем сохранено в памяти накопителя как место предыдущего массажа.
Далее, определяют, прошел ли предварительно заданный интервал времени (S310), и, если определено, что предварительно заданный интервал времени не прошел, то может многократно происходить выполнение этапов S302-S309 перезапуском режима массажа при возвращении к S302 и определении, лежит ли пользователь на термотерапевтическом устройстве 10, чтобы повторить массаж.
В этом случае термотерапевтическое устройство 10 может продолжить массаж с той части тела, на которой массаж был приостановлен, на основании информации о положении тела, сохраненной перед приостановом массажа. Это значит, что, если позиция пользователя была изменена в процессе после приостанова выполнения массажа, т.е. если пользователь выходит из термотерапевтического устройства 10 или приподнимается, а затем снова ложится, то положение позвонков станет иным, и, следовательно, распределение давления, создаваемого телом, может быть изменено, из-за чего пользователь может почувствовать себя некомфортно, если массаж будет продолжен в соответствии с величиной регулировки высоты перемещения ранее отрегулированной высоты перемещения.
Соответственно, массаж может быть выполнен снова с требуемой части тела путем поиска той части тела, на которой массаж был приостановлен. В этом случае, поскольку термокерамический модуль 200 перемещают в положение, в котором имеет место то давление, создаваемое телом, какое было у соответствующей части тела, на которой массаж был приостановлен, то массаж может быть выполнен снова так же, как и предыдущий массаж.
При определении на этапе S310, что предварительно заданный интервал времени прошел, пользователь может решить закончить массаж или может завершить режим массажа путем останова, и тогда режим массажа у термокерамического модуля 200 может быть завершен (S311).
Далее, информация о настройках текущего режима массажа может быть сохранена в накопителе 130 как пользовательская информация после завершения режима массажа (S312). Здесь информация о настройках текущего режима массажа может включать в себя, в конечном счете, информацию о режиме, информацию о температуре и информацию об интенсивности. В этом случае, если информация 132 пользователя была ранее сохранена, то эта информация 132 пользователя может быть обновлена информацией о настройках текущего режима массажа при завершении каждого режима массажа.
Соответственно, поскольку массаж может быть выполнен автоматически без специальных манипуляций со стороны пользователя для запуска, приостанова и завершения массажа и постоянно может идти обновление информации предыдущего режима массажа, то комфортность для пользователя может быть повышена.
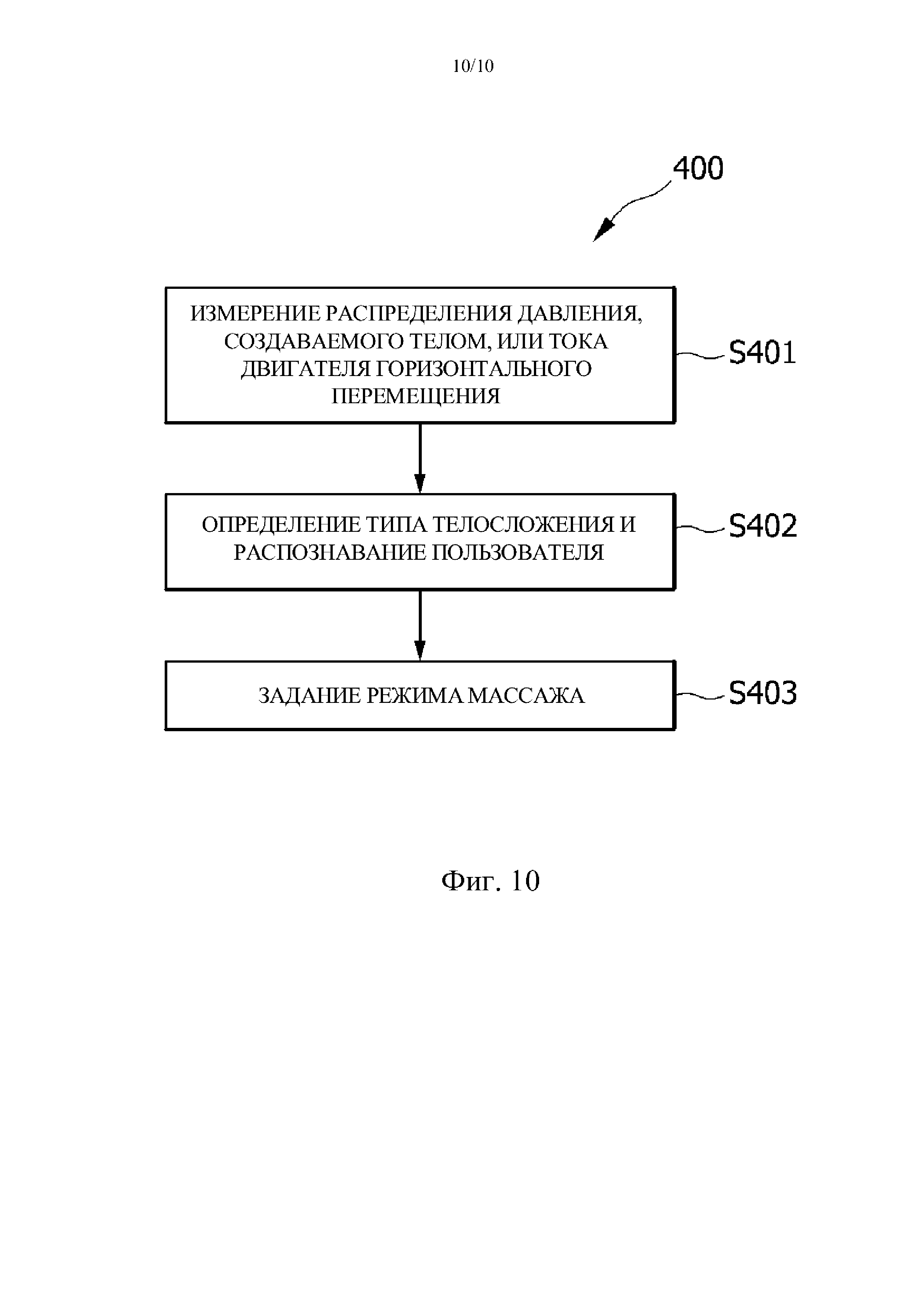
Автоматическая настройка режима массажа будет подробно описана со ссылкой на фиг. 10. Фиг. 10 показывает блок-схему, иллюстрирующую один пример запуска режима массажа, указанного на фиг. 9.
Сначала может быть измерен по меньшей мере один показатель из следующих: распределение давления, создаваемого телом, посредством сканирования тела человека и величина изменения тока двигателя 110 горизонтального перемещения (S401). В этом случае, поскольку двигатель 110 горизонтального перемещения перемещает горизонтально термокерамический модуль 200 в верхнем корпусе 102, и, таким образом, керамические элементы 240 надавливают на тело человека, то можно датчиком 250 веса измерять давление, создаваемое телом пользователя, или можно измерять величину изменения тока двигателя 110 горизонтального перемещения в процессе движения и горизонтального перемещения термокерамического модуля 200.
Далее, тип телосложения пользователя может быть определен на основе информации о типе телосложения, предоставленной заранее в соответствии с по меньшей мере одним показателем из следующих: распределение давления, создаваемого телом пользователя и измеренным датчиками 250 веса, и величина изменения тока двигателя 110 горизонтального перемещения, и пользователь может быть распознан на основе информации 132 пользователя в соответствии с выявленным типом телосложения пользователя (S402).
В этом случае информация 136 о типе телосложения, соответствующая по меньшей мере одному показателю из следующих: распределение давления, создаваемого телом, и величина изменения тока двигателя 110 горизонтального перемещения, может быть классифицирована в соответствии со стандартной информацией о позвонках и заранее сохранена в накопителе 130 для дальнейшего использования.
В этом случае, если пользователь впервые использует термотерапевтическое устройство 10 или если информация 132 пользователя не была ранее сохранена, то тип телосложения пользователя может быть сохранен в информации 132 пользователя. Далее, в этом случае настройка режима массажа (S403), которая будет описана ниже, может быть опущена.
Дополнительно режим массажа у термокерамического модуля 200 может быть автоматически задан на основании информации о настройках режима массажа для распознанного пользователя (S403). Автоматическая настройка может быть ограниченно выполнена, только если информация 132 пользователя сохранена заранее.
Соответственно, поскольку термотерапевтическое устройство 10 может распознать пользователя в соответствии со сканированием тела перед выполнением массажа и автоматически установить для режима массажа предварительно заданный режим массажа без специальных манипуляций со стороны пользователя, то комфортность для пользователя может быть дополнительно повышена.
Описанные выше способы могут быть реализованы контроллером 120 термотерапевтического устройства 10, как показано на фиг. 7, и, в частности, реализованы программным обеспечением, сконфигурированным для выполнения указанных этапов, и в этом случае программы могут быть сохранены на машиночитаемом носителе или переданы с помощью сигналов компьютерных данных, смешанных с несущей волной в среде передачи или сети.
В этом случае машиночитаемый носитель включает в себя все виды записывающих устройств, на которых можно хранить данные, читаемые компьютерной системой, например, ROM, RAM, CD-ROM, DVD-ROM, DVD-RAM, магнитная лента, дискета, жесткий диск, оптическое устройство хранения данных и т.д.
Хотя выше описан один вариант осуществления настоящего изобретения, сущность настоящего изобретения не ограничена вариантом осуществления, показанным в этом описании, и, хотя специалисты в данной области техники могут создать другие варианты осуществления путем добавления, изменения или удаления компонентов в пределах объема той же сущности настоящего изобретения, вышеупомянутые варианты осуществления также включены в объем правовой охраны настоящего изобретения.
Реферат
Группа изобретений относится к медицине, а именно к термотерапевтическому устройству для термомассажа с одной заданной интенсивностью и способу управления этим устройством. Устройство содержит термокерамический модуль, датчик веса и контроллер. Термокерамический модуль включает в себя корпус, первую и вторую опорную пластину, привод подъема и опускания, керамический элемент. Первая опорная пластина расположена на корпусе, а вторая на первой пластине. Привод соединен с нижней частью первой опорной пластины и выполнен с возможностью перемещения первой опорной пластины в вертикальном направлении на основании корпуса. Датчик веса расположен на нижней поверхности второй опорной пластины и измеряет давление, создаваемое телом пользователя. Контроллер предназначен для управления настройкой и реализацией режима массажа у термокерамического модуля, управляет высотой перемещения, обеспечиваемой приводом подъема и опускания, в соответствии с давлением тела пользователя. Контроллер обеспечивает постоянное давление на пользователя через керамический элемент на основании предварительно заданной желаемой интенсивности. При этом контроллер определяет, прошел ли предварительно заданный интервал времени без предварительно заданного изменения давления после того, как датчик веса зафиксировал значение давления выше первого исходного значения давления или равное ему. Запуск режима массажа контроллером происходит по способу автоматически, когда состояние, в котором значение давления выше первого исходного значения давления или равно ему и не изменяется, сохраняется в течение предварительно заданного времени. При исполнении способа задают режим массажа у термокерамического модуля. Измеряют давление тела пользователя. Определяют, прошел ли предварительно заданный интервал времени без предварительно заданного изменения давления после того, как датчик веса зафиксировал значение давления выше первого исходного значения давления или равное ему. Управляют реализацией режима массажа у термокерамического модуля, в процессе которого регулировка высоты перемещения, обеспечиваемая приводом подъема и опускания, происходит в соответствии с давлением, создаваемым телом пользователя и измеряемым датчиком веса, с целью обеспечения постоянного давления на пользователя через керамический элемент на основании предварительно заданной желаемой интенсивности. Обеспечивается термотерапевтическое устройство, предназначенное для обеспечения одинакового давления для каждого пользователя или для каждой части тела пользователя с заданной интенсивностью массажа, с возможностью распознавания пользователя по распределению давления, создаваемого его телом, и по типу его телосложения, с возможностью автоматического управления настройкой и реализацией массажа, и способ управления этим устройством. 2 н. и 9 з.п. ф-лы, 10 ил.
Комментарии