Устройство для установки приспособлений - спутников - SU1237381A1
Код документа: SU1237381A1
Чертежи
Описание
Изобретение относится к металлообработке и может быть использовано в автоматизированных линиях механообработки изделий машиностроения с использованием приспособлений-спутников.
Цель изобретения - расширение техно- логических возможностей и повышение производительности труда.
Поставленная цель достигается обеспечением подачи в зону обработки приспособлений-спутников в любом фиксированном положении через 90°, что позволяет обрабатывать детали с любой из четырех сторон, а также сменой приспособлений-спутников в любом из этих положений, что исключает операцию возврата последних в первоначальное положение, а следовательно, сокрашает время на вспомогательные движения .
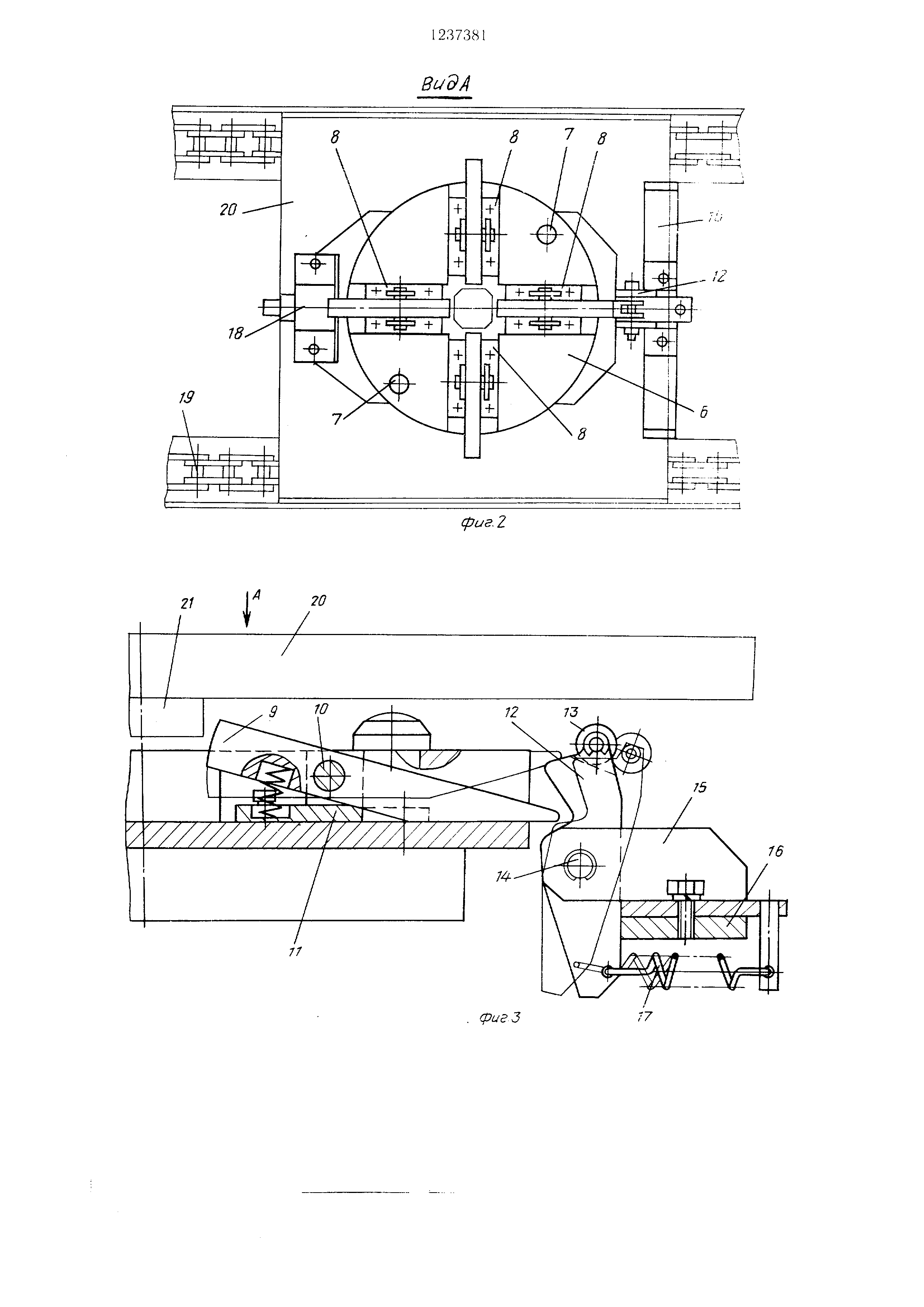
На фиг. 1 изображено устройство, об- ш,ий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - узел предварительной фиксации приспособления-спутника в загрузочно-раз- грузочной позиции; на фиг. 4, 5 и 6 - положение элементов устройства на различных этапах работы.
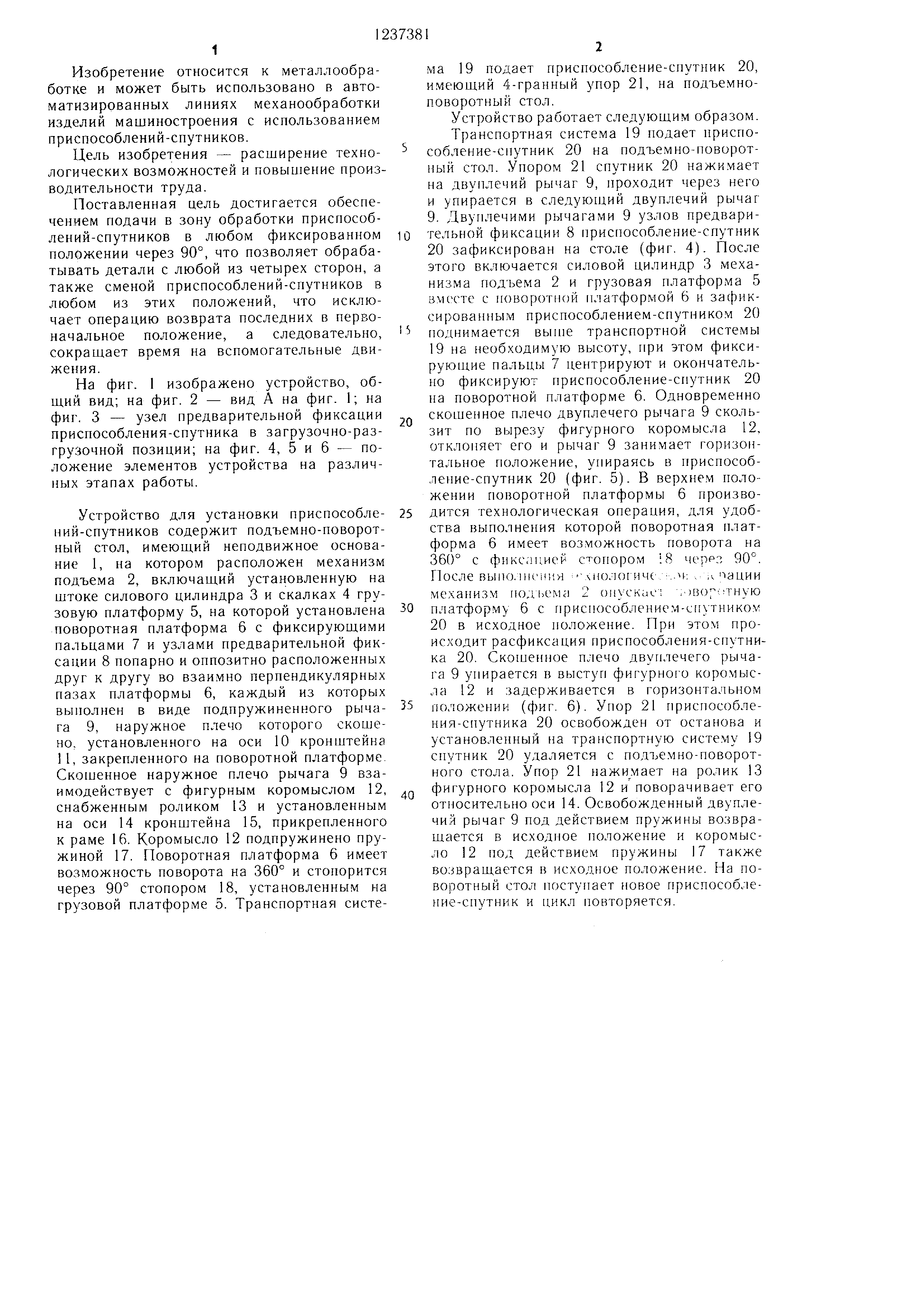
Устройство для установки приспособле- НИИ-спутников содержит подъемно-поворотный стол, имеюш,ий неподвижное основание 1, на котором расположен механизм подъема 2, включащий установленную на штоке силового цилиндра 3 и скалках 4 грузовую платформу 5, на которой установлена поЕюротная платформа 6 с фиксируюшими пальцами 7 и узлами предварительной фиксации 8 попарно и оппозитно расположенных друг к другу во взаимно перпендикулярных пазах платформы 6, каждый из которых выполнен в виде подпружиненного рыча- га 9, наружное плечо которого скошено , установленного на оси 10 кронштейна 11, закрепленного на поворотной платформе. Скошенное наружное плечо рычага 9 взаимодействует с фигурным коромыслом 12, снабженным роликом 13 и установленным на оси 14 кронштейна 15, прикрепленного к раме 16. Коромысло 12 подпружинено пружиной 17. Поворотная платформа 6 имеет возможность поворота на 360° и стопорится через 90° стопором 18, установленным на грузовой платформе 5. Транспортная система 19 подает приспособление-спутник 20, имеюший 4-гранный упор 21, на подъемно- поворотный стол.
Устройство работает следуюшим образом.
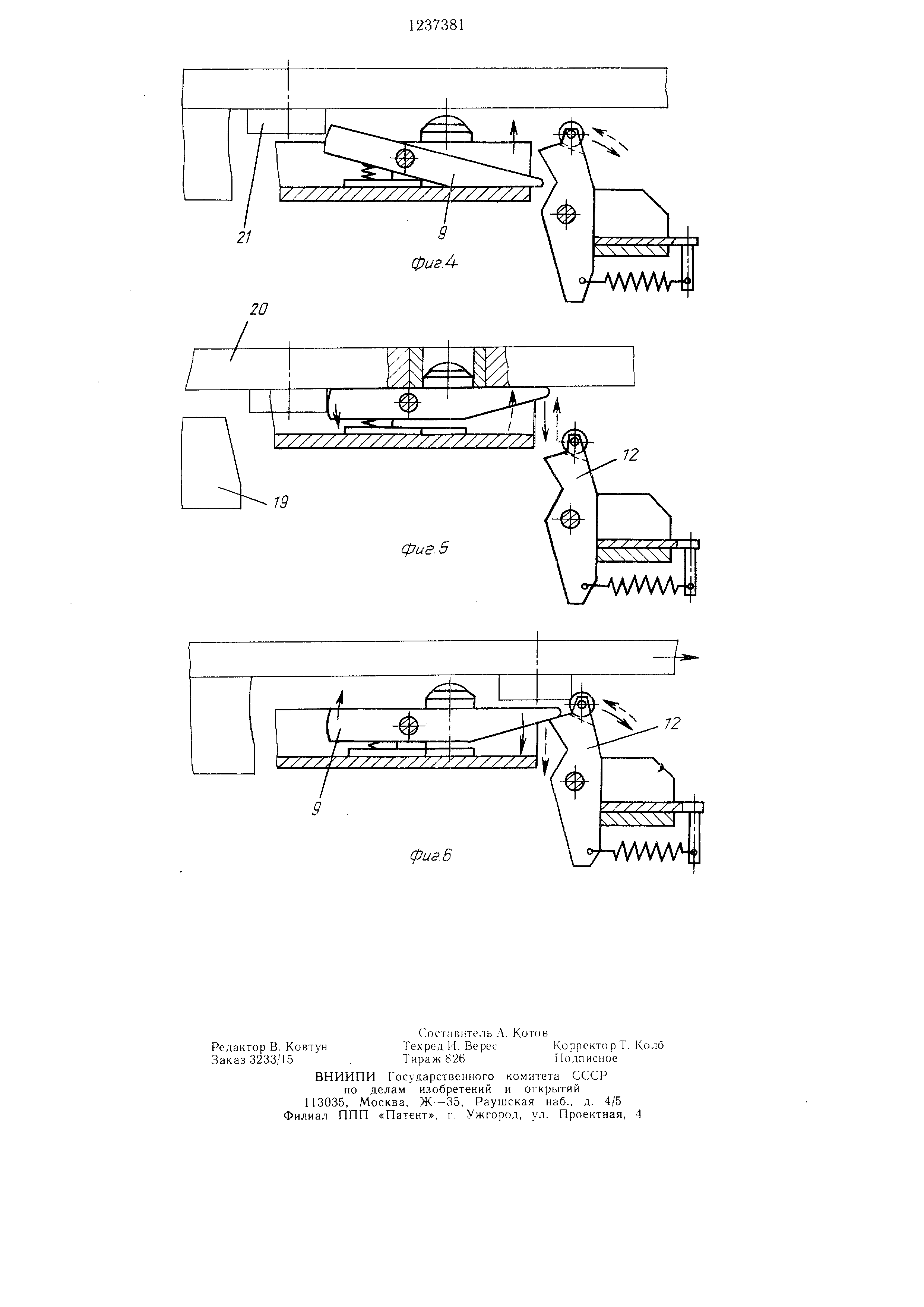
Транспортная система 19 подает приспособление-спутник 20 на подъемно-поворотный стол. Упором 21 спутник 20 нажимает на двуплечий рьЕчаг 9, проходит через него и упирается в следующий двуплечий рычаг 9. Двуплечими рычагами 9 узлов предварительной фиксации 8 приспособление-спутник 20 зафиксирован на столе (фиг. 4). После этого включается силовой цилиндр 3 механизма подъема 2 и грузовая платформа 5 с поворотной платформой 6 и зафиксированным приспособлением-спутником 20 поднимается выше транспортной системы
19на необходимую высоту, при этом фиксирующие пальцы 7 центрируют и окончательно фиксируют приспособление-спутник 20 на поворотной платформе 6. Одновременно скошенное плечо двуплечего рычага 9 скользит по вырезу фигурного коромысла 12, отклоняет его и рычаг 9 занимает горизонтальное положение, упираясь в приспособление-спутник 20 (фиг. 5). В верхнем положении поворотной платформы 6 производится технологическая операция, для удобства выполнения которой поворотная платформа 6 имеет возможность поворота на 360° с фиксацией стопором ;8 черр, 90°. После выпо.1Н( лнологичс ..н; . ,:. пации мехапизм польема 2 оиускас ; г)во;(тную платформу 6 с гфиспособлением-енчтником
20в исходное положение. При этом происходит расфиксация приспособления-спутника 20. Скошенное плечо двуплечего рычага 9 упирается в выступ фигурного коромысла 12 и задерживается в горизонтальном положении (фиг. 6). Упор 21 приспособления-спутника 20 освобожден от останова и установленный на транспортную систему 9 спутник 20 удаляется с подъемно-поворотного стола. Упор 21 пажимает на ролик 13 фигурного коромысла 12 и поворачивает его относительно оси 14. Освобожденный двуплечий рычаг 9 под действием пружины возвращается в исходное положение п коромысло 12 под действием пружины 17 также возврашается в исходное положение. На поворотный стол поступает новое приспособление-спутник и цикл повторяется.
Реферат
Формула
Комментарии