Способ и система для формирования борозд в почве - RU2449524C2
Код документа: RU2449524C2
Чертежи
Описание
Область техники, к которой относится изобретение
Изобретение относится к сельскохозяйственному оборудованию для обработки почвы, а более конкретно к способу и системе для формирования гребней на почве для использования с высаживаемыми в гребни зерновыми.
Уровень техники
Сельскохозяйственные поля могут орошаться для избирательного применения воды или химикатов, таких как жидкие удобрения и инсектициды. Оросительные системы могут включать в себя машины с поливом в движении по кругу, бегунки и поверхностное орошение. Машины с поливом в движении по кругу и бегунки обычно используют компоновку скважины и насоса и подают около 800-1500 галлонов в минуту воды и вовлеченных химикатов. Поверхностное орошение обычно использует компоновку вентильного затопления с водным оросительным каналом на верхнем краю поля. На поле, которое использует поверхностное орошение, установившаяся практика состоит в том, чтобы также использовать технологии гребневой посадки. Растения взращиваются на гребнях с бороздами между гребнями. Движение воды регулируется уклоном дна борозд. Вода перемещается с одного края поля на другой через борозды. В то время как вода перемещается через поле, некоторое количество почвы также перемещается, так что уклон со временем изменяется, и по мере того, как это происходит, эффективность оросительной системы со временем снижается. Каждые несколько лет, когда эффективность оросительной системы по существу снижается, так что наносится вред урожаю, поле может полностью выравниваться с использованием оборудования лазерного уровня и перемещения почвы. Затем гребни снова возвращаются на место с использованием специального гребнеобразующего инструмента. Затраты на полное выравнивание, реградирование и восстановление гребней в поле являются существенными.
В данной области техники необходимы способ и система для поддержания правильного уклона на дне борозд для надлежащего орошения и удлинения продолжительности до тех пор, пока новые гребни не должны перестраиваться в поле.
Сущность изобретения
Изобретение представляет собой, в одной из его форм, способ формирования борозд в почве, включающий в себя этапы: определения существующих профилей возвышения для множества существующих борозд в географической единице; установления целевого профиля возвышения для каждой из существующих борозд; и перемещения почвы в боковом направлении, к или от одной или обеих боковых стенок, по длине каждой борозды для получения целевых профилей возвышения в пределах географической единицы.
Изобретение представляет собой, в другой его форме, систему для формирования борозды в почве, включающую в себя систему позиционирования, выполненную с возможностью перемещения по существующей борозде для определения существующего профиля возвышения по длине существующей борозды. Рабочее средство включает в себя регулируемый гребнеобразующий инструмент для перемещения почвы в боковом направлении, к или от по меньшей мере одной боковой стенки борозды. Рабочее транспортное средство, выполненное с возможностью перемещения вдоль существующей борозды, соединено с рабочим средством. Рабочее транспортное средство включает в себя электрический процессор, связанный с памятью. Существующий профиль возвышения сохраняется в памяти, а процессор рассчитывает целевой профиль возвышения для существующей борозды. Процессор также связан с и управляемым образом приводит в действие регулируемый гребнеобразующий инструмент по длине каждой борозды для получения целевого профиля возвышения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 представляет собой схематичный вид варианта выполнения системы формирования борозд согласно настоящему изобретению;
фиг. 2 представляет собой фрагментарный схематичный вид в перспективе участка поля, с которым может использоваться система формирования борозд, показанная на фиг. 1;
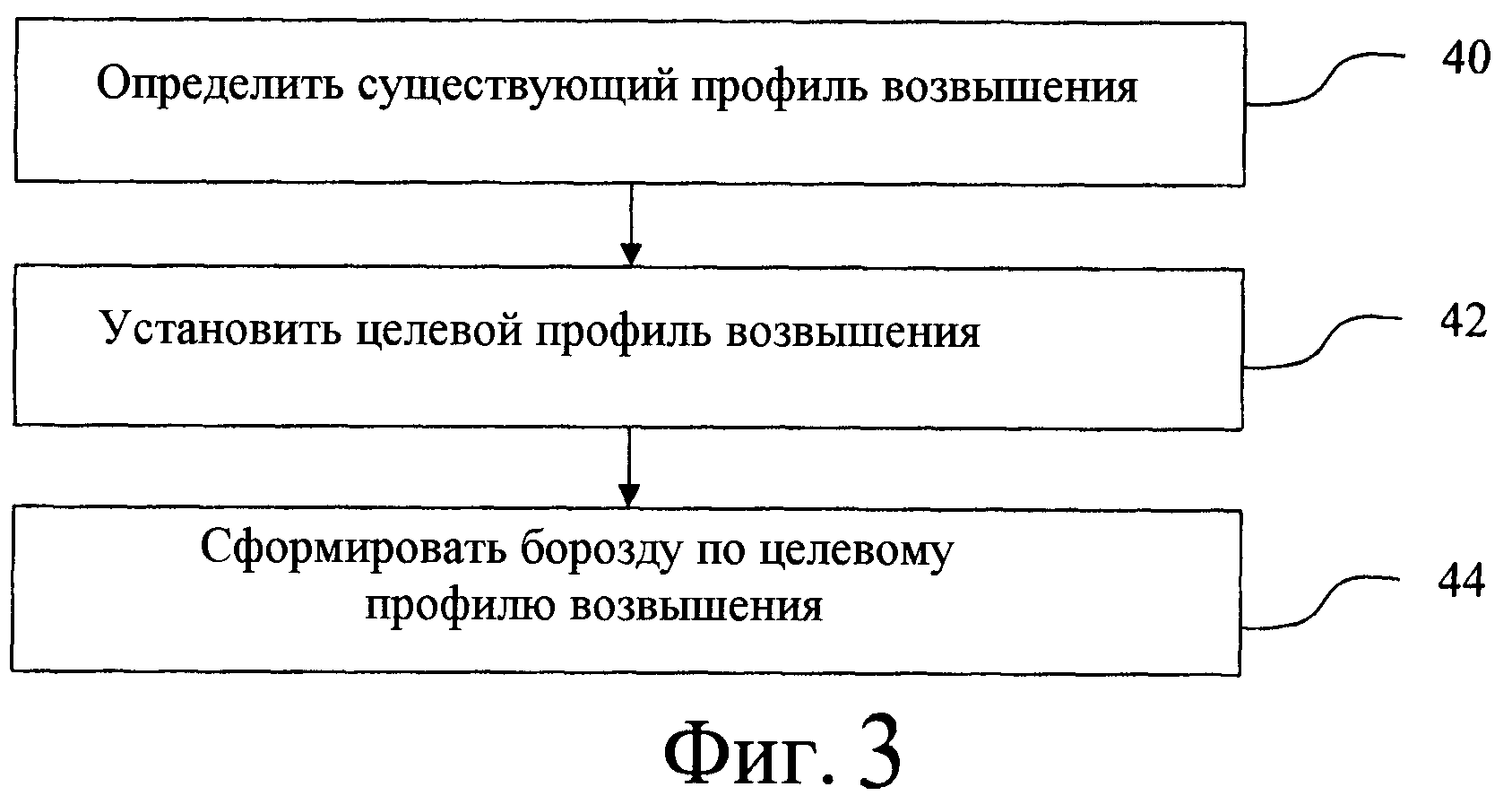
Фиг. 3 представляет собой блок-схему последовательности операций варианта осуществления способа формирования борозд согласно настоящему изобретению; и
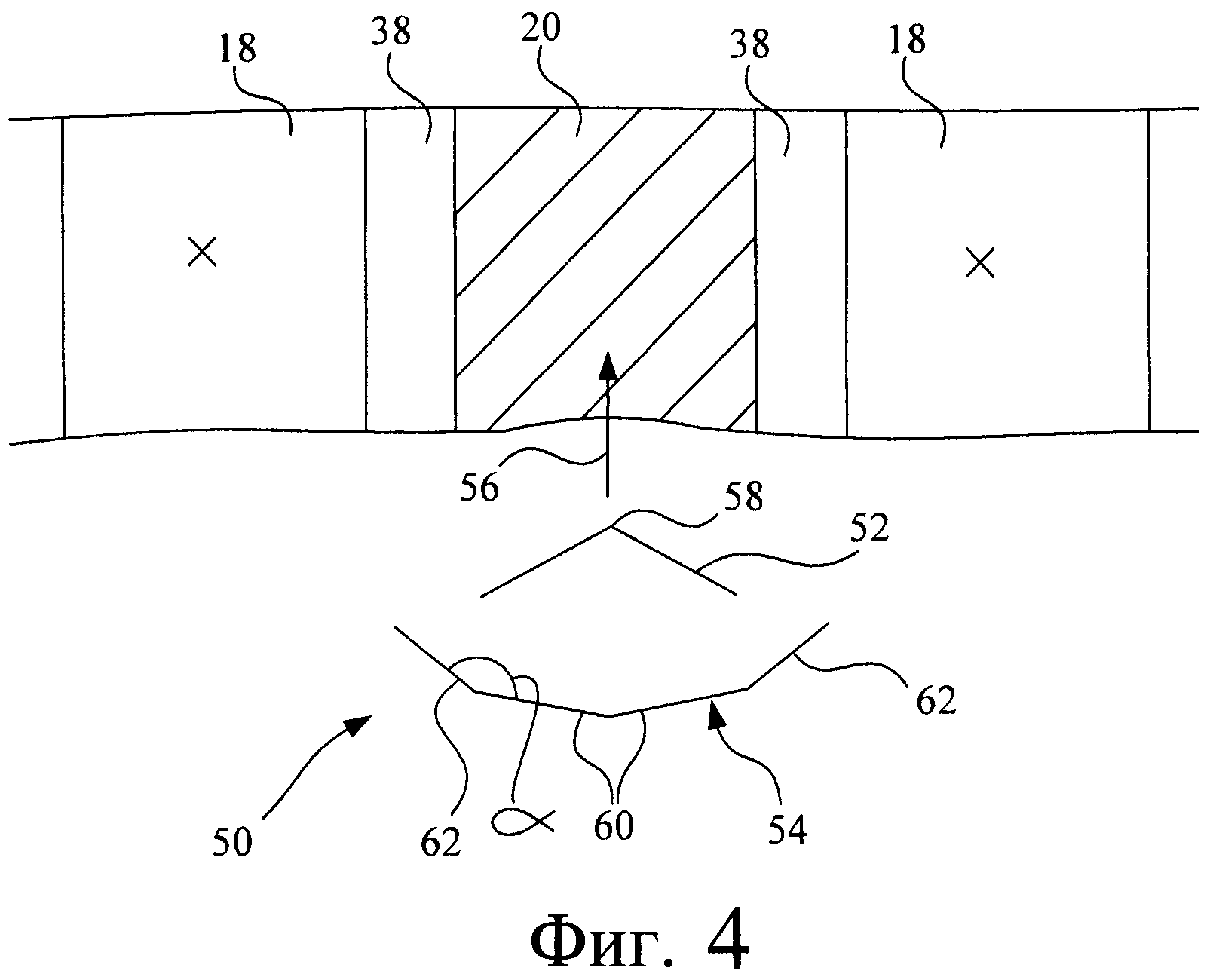
фиг. 4 представляет собой схематичный вид сверху варианта осуществления регулируемого гребнеобразующего инструмента, используемого со способом и системой формирования борозд согласно настоящему изобретению.
Подробное описание изобретения
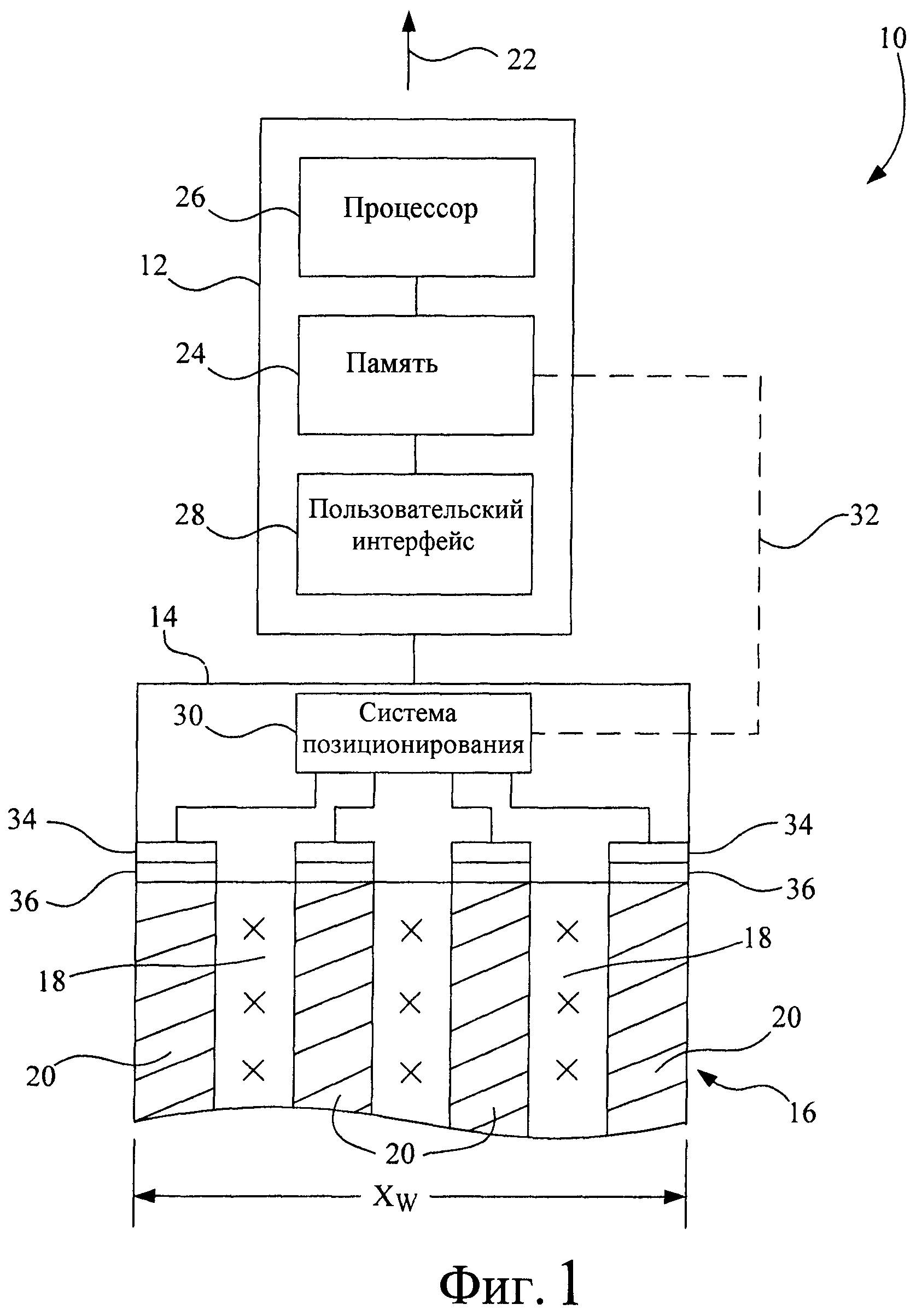
Далее со ссылкой на чертежи, а более конкретно на фиг. 1 показан вариант осуществления системы 10 формирования борозд согласно настоящему изобретению для формирования борозды в почве. Система 10 формирования борозд, в целом, включает в себя рабочее транспортное средство 12, которое соединено с рабочим средством 14, перемещающимся по географической единице 16 почвы. В показанном варианте осуществления географическая единица 16 соответствует заданному количеству рядов высаживаемых в гребни зерновых, каждый ряд включает в себя гребень 18, лежащий между парой в целом параллельных борозд 20 (показанных заштрихованными перекрестной штриховкой на фиг. 1 для иллюстрации). Географическая единица 16 имеет ширину Xw, как правило, соответствующую ширине рабочего средства 14, и длину, соответствующую длине гребней 18 и борозд 20 по полю. X, размещенные на разнесенных интервалах вдоль верхней части каждого гребня 18, изображают местоположения, в которых высажены хлебные злаки, соответствующие требуемой популяции растений в пределах географической единицы 16. Количество гребней и рядов в пределах каждой географической единицы 16, соответствует ширине гребней 18 и борозд 20 по рабочей ширине Xw рабочего средства 14.
Хотя географическая единица 16 показана в виде соответствующего некоторому количеству рядов, проходящих по ширине рабочего средства и длине поля, также можно определять географическую единицу 16 с любыми требуемыми дискретными формой и размером. Например, географическая единица 16 может быть целым полем или разным количеством рядов в пределах поля.
Рабочее транспортное средство 12, такое как сельскохозяйственный трактор, обычно включает в себя двигатель внутреннего сгорания, обеспечивающий движущую силу на множество колес или гусениц (не показаны) для передвижения рабочего транспортного средства 12 и рабочего средства 14 по длине гребней 18 и борозд 20 в пределах географической единицы, как показано стрелкой 22. Рабочее транспортное средство 12 также включает в себя электрический процессор 24, который связан с памятью 26 и пользовательским интерфейсом 28. Процессор 24 может включать в себя любое требуемое сочетание аппаратных средств, программно-аппаратных средств и/или программного обеспечения для выполнения функций и приведения в действие определенных подсистем, расположенных на борту рабочего транспортного средства 12 и/или рабочего средства 14. Память 26 предпочтительно выполнена в виде долговременной памяти, но также может быть выполнена в виде кратковременной памяти или их комбинации.
Пользовательский интерфейс 28 может включать в себя устройство пользовательского ввода, такое как клавиатура или сенсорный экран и/или дисплей, такой как жидкокристаллический (LCD) дисплей для отображения выбранной информации.
Рабочее средство 14 несет систему 30 позиционирования, которая связана с процессором 24, расположенным на борту рабочего транспортного средства 12, как показано пунктирной линией 32. Например, система 30 позиционирования может быть электрически связана проводами с процессором 24 или связана с процессором 24 беспроводным образом с использованием радиочастотной (РЧ, RF) технологии. Система 30 позиционирования связана с множеством регулируемых гребнеобразующих инструментов 34 и, при необходимости, соответствующим количеством устройств 36 зацепления с поверхностью. Каждое устройство 36 зацепления с поверхностью входит в зацепление с поверхностью борозды 20 и выдает выходные сигналы в систему позиционирования 30 и процессор 24 для определения существующего профиля возвышения каждой борозды 20 по ее длине в пределах географической единицы 16. Пример устройства 36 зацепления с поверхностью в виде колеса показан на фиг. 2, но также возможны другие конфигурации, такие как башмак, пластина с клиновидной ведущей кромкой и т.п. Регулируемый гребнеобразующий инструмент 34 более подробно будет описан ниже со ссылкой на фиг. 4.
Со ссылкой на фиг. 2, множество гребней 18 и борозд 20, которые переформируются с использованием способа формирования борозд согласно настоящему изобретению, взаимосвязаны наклонными боковыми стенками 38. Обычно гребни 18, борозды 20 и боковые стенки 38 формируются с использованием гребнеобразующего инструмента, имеющего постоянную форму. Поле выравнивается и общий требуемый уклон достигается с использованием оборудования перемещения почвы, ножей грейдера и т.п. После этого гребни 18, борозды 20 и боковые стенки 38 формируются с использованием гребнеобразующего инструмента с постоянной формой. Способ формирования борозд по настоящему изобретению не перемещает почву по длине борозд 20, а скорее переменным образом изменяет ширину гребней 18 для добавления почвы в борозды 20 или удаления почвы из борозд 20 по их длине.
Далее, со ссылкой на фиг. 3, будет более подробно описан вариант осуществления способа формирования борозд согласно настоящему изобретению. Для географической единицы необходимо определять существующие профили возвышения по длине поверхности каждой борозды 20 (этап 40). В одном из вариантов осуществления рабочее транспортное средство 12 и рабочее средство 14 перемещаются по географической единице 16, а множество колес 36, соответственно связанных с каждой бороздой 20, передают данные локального возвышения для борозды 20 в систему 30 позиционирования и процессор 24. Другой вариант для определения существующих профилей возвышения для борозды 20 состоит в том, чтобы пользоваться заданными описаниями профилей возвышения для географической единицы. Заданные профили возвышения могут быть из других полевых работ на географической единице, которые предшествовали непосредственно или происходили в более ранний момент времени. Если используются заданные профили возвышения, информация должна быть достаточно современной, чтобы профили возвышения, насколько это можно ожидать, не изменились в результате размываний от орошения или дождя и т. п.
Система 30 позиционирования предпочтительно передает трехмерные данные в пределах географической единицы 16. Примером системы позиционирования, передающей трехмерные данные, является кинетическая глобальная система определения местоположения в реальном времени (RTK GPS). Также могут использоваться другие системы позиционирования, передающие данные возвышения, такие как лазерный уровень. Существующий профиль возвышения каждой борозды 20 сохраняется в памяти 26. Размер географической единицы 16 может быть расширен до большей площади, такой как все поле, если память 26 имеет достаточную емкость для хранения всех профилей возвышения.
Процессор 24 рассчитывает целевой профиль возвышения для каждой борозды 20 в пределах географической единицы (этап 42). Целевой профиль возвышения для каждой борозды 20 может быть средним значением по некоторому количеству соседних борозд, или каждая борозда может иметь отдельно рассчитанный целевой профиль возвышения. Данные для каждого целевого профиля возвышения также сохраняются в памяти 26 для последующего использования при формировании борозд 20 и гребней 18.
С известным существующим профилем возвышения для каждой борозды 20 и целевым профилем возвышения для каждой борозды 20 рабочее средство 14 перемещается по географической единице 16 по длине борозд 20. Система 30 позиционирования, под управлением процессора 24, управляемым образом приводит в действие регулируемые гребнеобразующие инструменты 34 по мере того, как рабочее транспортное средство 12 и рабочее средство 14 проходит по географической единице. Каждый регулируемый гребнеобразующий инструмент 34 является управляемым для снятия почвы со дна борозды и сталкивания почвы к одной или обеим соседним боковым стенкам 38, если дно борозды 20 является слишком высоким. Подобным образом, каждый регулируемый гребнеобразующий инструмент 34 может управляемым образом приводиться в действие, чтобы снимать почву с одной или обеих соседних боковых стенок 38 и размещать почву в борозде, если дно борозды является слишком низким. Таким образом, дно каждой борозды 20 по длине географической единицы может подниматься и опускаться, при необходимости, чтобы добиваться требуемого уклона для надлежащего потока воды, являющегося следствием дождя или орошения (этап 44).
На фиг. 4 показан вариант воплощения регулируемого гребнеобразующего инструмента 50, который может использоваться со способом и системой согласно настоящему изобретению. Гребнеобразующий инструмент 50 показан по отношению к гребням 18, бороздам 20 и паре взаимосвязанных боковых стенок 38. Гребнеобразующий инструмент 50 включает в себя передний нож 54, по отношению к направлению 56 перемещения по борозде 20. Передний нож 52 является V-образным ножом с постоянной формой, с парой пластин, соединенных на ведущей кромке 58. Нижняя кромка ножа 52 устанавливается на требуемой глубине борозды 20. В случае, если борозда 20 является слишком высокой, то нож 54 поднимается в нерабочее положение (перпендикулярно плоскости фиг. 4, по направлению к читателю), и нож 52 перемещает почву в боковом направлении, к боковым стенкам 38. В показанном варианте осуществления общая ширина ножа 52 является слегка меньшей, чем текущая ширина борозды 20, но могла бы быть приблизительно такой же шириной, как борозда 20. Более того, постоянный угол между парой пластин, образующих нож 52, может изменяться в зависимости от требуемого выталкивающего наружу в боковом направлении действия ножа 52.
Нож 54 включает в себя пару зафиксированных пластин 60, каждая из которых соединена на наружном конце с крыльчатой пластиной 62. Нож выполнен с возможностью перемещения в направлениях, перпендикулярных плоскости чертежа по фиг. 4, как отмечено выше, например, с помощью гидравлических или пневматических цилиндров, рычажных механизмов, винтов и т. п., присоединенных к подходящему каркасу. Каждая крыльчатая пластина 62 находится в постоянной угловой ориентации α относительно пластин 60, но также может быть регулируемой по углу, чтобы снимать переменное количество почвы со скошенных боковых стенок 38. В случае, если борозда 20 является слишком низкой, то нож 54 опускается в рабочее положение до тех пор, пока его нижняя кромка не находится в целом в той же плоскости, что и нижняя кромка ножа 52 (перпендикулярно плоскости фиг. 4, от читателя). Почва, которая отваливается вбок от ножа 52, повторно выравнивается с использованием ножа 54, и почва, снятая со скошенных боковых стенок 38, повторно выравнивается с использованием ножа 54.
Хотя нож 54 показан с крыльчатыми пластинами 62 при постоянной угловой ориентации относительно пластин 60, может быть желательным изготавливать крыльчатые пластины 62 с регулируемой угловой ориентацией относительно пластин 60. Таким образом, количество почвы, осаждаемое на поверхности борозды 20, может дополнительно регулироваться для достижения целевого уровня возвышения.
Хотя настоящее изобретение описано выше относительно формирования борозд в поверхности оросительной системы, следует понимать, что способ и система для формирования борозд согласно настоящему изобретению могут использоваться в любом применении, требующем формирования гребней, разделенных бороздами, таком как высаживаемые в неорошаемые гребни зерновые.
С пониманием описанного предпочтительного варианта осуществления будет очевидно, что различные модификации могут быть произведены, не выходя за объем изобретения, который определен в прилагаемой формуле изобретения.
Реферат
Изобретение относится к сельскому хозяйству. В способе формирования борозд в почве определяют существующие профили возвышения для множества существующих борозд в географической единице; устанавливают целевой профиль возвышения для каждой из существующих борозд; и перемещают почву в боковом направлении к или от, по меньшей мере, одной боковой стенки по длине каждой борозды для получения целевых профилей возвышения в пределах географической единицы. Система содержит: систему позиционирования, выполненную с возможностью перемещения по существующей борозде для определения существующего профиля возвышения по длине существующей борозды; рабочее средство, включающее в себя регулируемый гребнеобразующий инструмент для перемещения почвы в боковом направлении к или от, по меньшей мере, одной боковой стенки борозды; рабочее транспортное средство, выполненное с возможностью перемещения вдоль борозды и соединенное с рабочим средством, при этом рабочее транспортное средство включает в себя электрический процессор, связанный с памятью, причем обеспечивается сохранение в памяти существующего профиля возвышения. При этом процессор обеспечивает расчет целевого профиля возвышения для существующей борозды. Причем процессор связан с регулируемым гребнеобразующим инструментом и управляемым образом обеспечивает приведение его в действие по длине каждой борозды для получения целевого профиля возвышения. Изобретение позволяет поддерживать правильный уклон на дне борозд для надлежащего орошения. 3 н. и 27 з.п. ф-лы, 4 ил.
Формула
определяют существующий профиль возвышения по длине поверхности для существующей борозды;
устанавливают целевой профиль возвышения по длине существующей борозды; и
перемещают почву в боковом направлении к или от, по меньшей мере, одной боковой стенки борозды для получения целевого профиля возвышения по длине борозды.
определяют существующие профили возвышения для множества существующих борозд в географической единице;
устанавливают целевой профиль возвышения для каждой из существующих борозд; и
перемещают почву в боковом направлении к или от, по меньшей мере, одной боковой стенки по длине каждой борозды для получения целевых профилей возвышения в пределах географической единицы.
систему позиционирования, выполненную с возможностью перемещения по существующей борозде для определения существующего профиля возвышения по длине существующей борозды;
рабочее средство, включающее в себя регулируемый гребнеобразующий инструмент для перемещения почвы в боковом направлении к или от, по меньшей мере, одной боковой стенки борозды;
рабочее транспортное средство, выполненное с возможностью перемещения вдоль существующей борозды и соединенное с рабочим средством, при этом рабочее транспортное средство включает в себя электрический процессор, связанный с памятью, причем обеспечивается сохранение существующего профиля возвышения в памяти, при этом процессор обеспечивает расчет целевого профиля возвышения для существующей борозды, причем процессор связан с регулируемым гребнеобразующим инструментом и управляемым образом обеспечивает приведение его в действие по длине каждой борозды для получения целевого профиля возвышения.
Комментарии