Копировально-шлифовальный станок - SU1202832A1
Код документа: SU1202832A1
Чертежи
Описание
1
Изобретение относится к станкостроению и может быть использовано в копировальных станках, например, для.шлифовальной обработки кулачков распределительных валов двигателей внутреннего сгорания.
Цель изобретения - упрощение конструкции и повьппение надежности за счет уменьшения количества датчиков выполнения оси кулачка задающей подчи неподвижной в пространстве и установки датчиков и коммутатора неподвижно на столе.
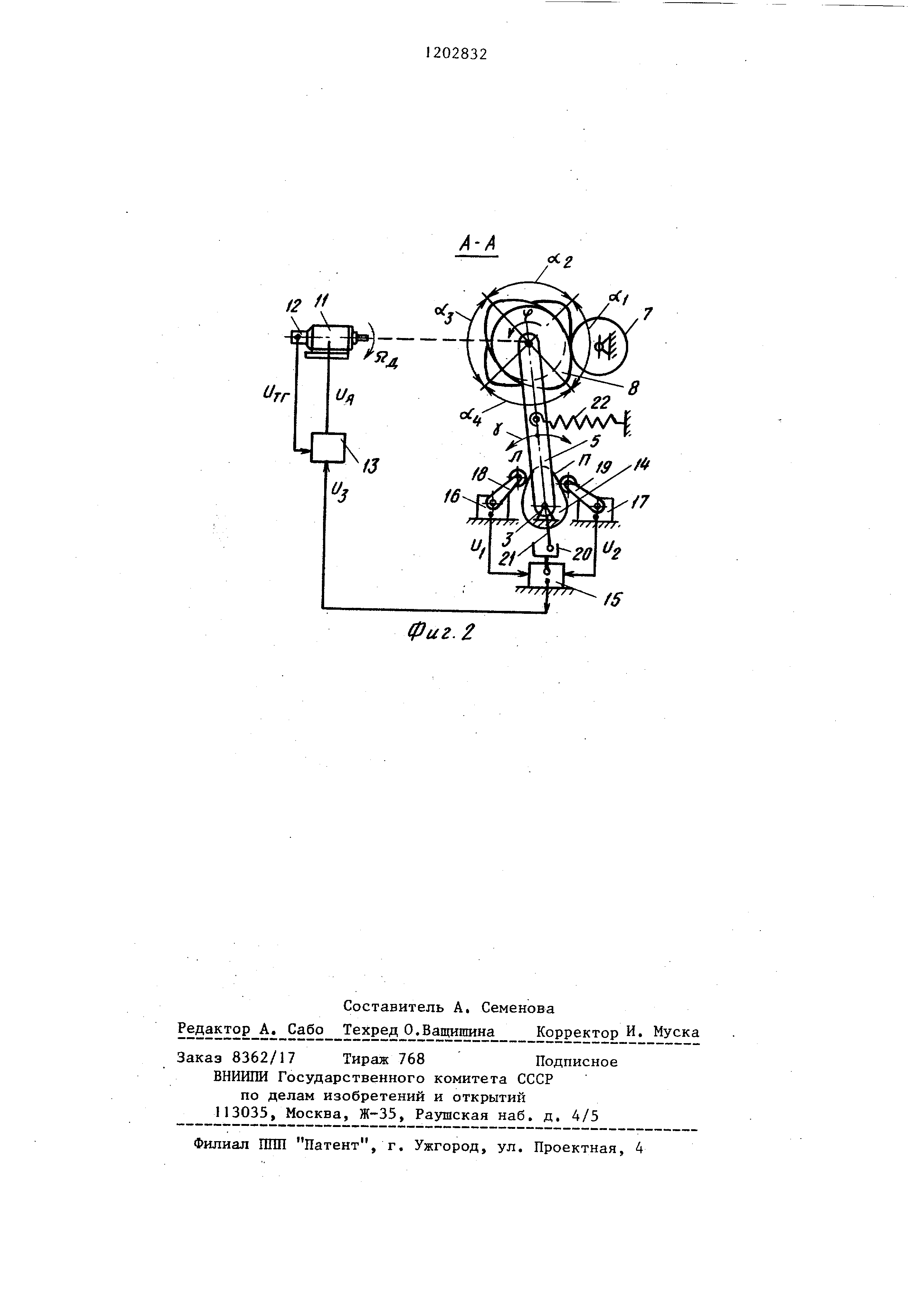
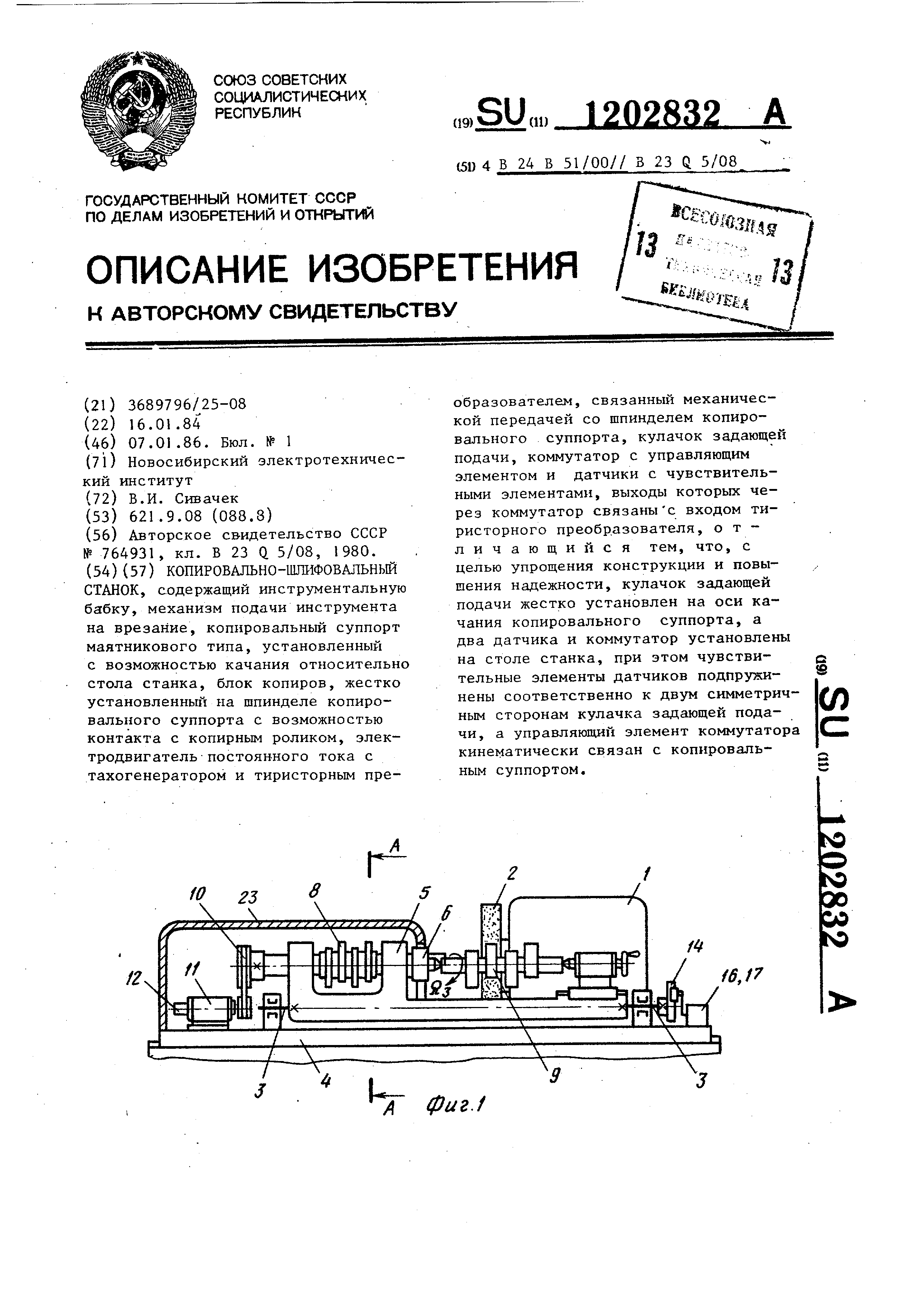
На фиг. 1 изображен копировально шлифовальный станок, общий вид; на фиг. 2 - поперечное сечение А-А на фиг. 1 (схема копировального суппорта с устройством для управления ско ростЬю электродвигателя) .
Станок содержит инструментальную бабку 1 со шлифовальным кругом 2 и механизмом подачи инструмента на врезание, выполненный с возможностью качания на оси 3 относительно стола 4 станка копиров альный суппорт 5 маятникового типа, на шпинделе 6 которого жестко установлены контактирующий с капирным роликом 7 блок копиров 8 и обрабатываемая деталь (кулачок) 9, связанный механической передачей со шпинделем 6 копировального суппорта 5 (например посредством ременной передачи 10) электродвигатель 11 постоянного тока с тахогенератором 12 и тиристорным преобразователем 13, кулачок 14 задающей подачи, коммутатор 15 и датчики 16 и 17, выходы которьпс через коммутатор 15 связаны со входом тиристорного преобразователя ГЗ. Кулачок 14 задающей подачи выполнен с правым(П) и левым (Л) рабочими профилями и установлен жестко на оси 3 качания копировального суппорта 5, коммутатор 15 и датчики 16 и 17 установлены на столе 4 копировального станка, причем воспринимающий элемент 18 датчика 16 подпружинен к левому рабочему профилю Л кулачка 14 задающей подачи, воспринимающий элемент 19 датчика 17 подпружинен к правому рабочему профилю П кулачка 14 задающей подачи, а управляющий элемент 20 коммутатора 15 кинематически связан, например, посредством кривошипа 21 с копировальным суппортом 5. Блок копиров 8 прижат к копирному ролику 7 посредством
028322
пружины 22, а копирный ролик 7 установлен на корпусе передней бабки 23.
Кулачок 14 предназначен для управ- 5 ления скоростью вращения (задающей подачей шпинделя 6 или скоростью вращения электродвигателя 11. В отличие от известного копировального станка, это управление осуществля О ется в функции угла качания
(фиг. 2) копировального суппорта 5, однозначно зависящего от профиля и угла поворота копира 8. В общем случае необходимый закон изменения 15 задающей подачи в функции угла качания у при обработке участков подъема кулачка 9, т.е. при вращении копировального суппорта 5 против часовой стрелки, отличается от не20 обходимого закона изменения задающей I
подачи при обработке участка спуска кулачка 9, т.е. при вращении копировального суппорта 5 по часовой стрелке. Поэтому на кулачке 14 вы полнено два профиля: левый профиль А спроектирован в соответствии с необходимым законом изменения задающей подачи при вращении копир.оваль- ного суппорта 5 против часовой стрел30 ки, а правый профиль П-в соответствии с необходимым законом изменения задающей подйчи при вращении копировального суппорта 5 по часовой стрелке .
35 Датчики 16 и I7 предназначены для съема воплощенной в профиле кулачка информации о необходимом законе изменения подачи и преобразования ее в электрические сигналы
40 Uj| и 1/2 для управления скоростью электродвигателя 11,
Коммутатор 15 выполнен с двумя устойчивыми состояниями и предназначен для поочередного подключения к
45 входу тиристорного преобразователя 13 выхода датчика 16 или 17, причем переключение коммутатора из одного устойчивого состояния в другое осуществляется скачкообразно в моменты
50 прихода копировального суппорта 5 в крайнее левое и крайнее правое положения посредством воздействия кривошипа 21 на управляющий элемент 20 коммутатора.
J5 Станок работает следующим образом .
Для обработки кулачка детали 9 копирный ролик 7 вводят в контакт
с соответствующим копиром 8 и включают электродвигатель 11. Электродвигатель 11 приводит во вращение шпиндель 6 с жестко установленным на нем копиром 8 и обрабатываемым кулачком. При этом копировальный суппорт 5 благодаря непрерывному контакту копира 8 с копирным роликом 7 совершает качательное движение на оси 3, в котором текущее значение угла качания однозначно определяется профилем и углом поворота С копира 8. Благодаря сочетанию задающего движения шпинделя 6 с копиром 8 и формообразующего (копировального ) движения копировального суппорта 5 шлифовальный круг 2 формирует на обрабатываемом кулачке профиль, аналогичный профилю копира 8.
При контакте копирного ролика 7 с участком подъема копира 8 (фиг. 2) копировальный суппорт совершает вращение против часовой стрелки, а коммутатор 15 находится в своем первом устойчивом состоянии и подключает к первому входу тиристорного преобразователя 13 выход датчика 16, В момент прихода копировального суппорта 5 в крайнее левое положение кривошип 21 воздействует на управляющий элемент 20 коммутатора 15 и скачкообразно переключает последний во второе устойчивое состояние. В результате этого к первому входу тиристорного преобразователя подключается выход датчика 17. Такое подключение сохраняется до момента прихода копировального суппорта 5 в крайнее правое положение, при котором кривошип 21 скачкообразно переключает коммутатор 15 в neisBoe устойчивое состояние . После этого описанный процесс поочередного подключения выходов датчиков 16 и 17 к первому входу тиристорного преобразователя 13 повторяется .
Датчики 16 и 17 вырабатывают сигналы и и Ug, которые пропорцио- нальны радиусам соответственно левого
1202832
профиля л и правого профиля П в точках контакта с ними воспринимающих элементов 18 и 19 этих датчи
ков. Сигналы U, и U определяют закон изменения скорости электродвигателя 1I в функции угла качания у копировального суппорта 5, причем сигнал и, определяет изменение скорости электродвигателя 11 при вращении копировального суппорта 5 против часовой стрелки, а сигнал Uj - при вращении копировального суппорта 5 по часовой стрелке.
На второй вход тиристорного преоб
разователя 13 поступает сигнал
обратной связи UT тахогенератора 12. В тиристорном преобразователе сигнал тахогенератора Uj, сравнивается с задающим сигналом U, который
поступает на первый вход тиристорного преобразователя и равен сиг.- налу и, или V. ( зависимости от того, какой из датчиков 16 или 17 подключен к первому входу тиристорного преобразователя), и по результату этого сравнения тиристорный преобразователь вырабатывает такое напряжение U, при котором разность между задающим сигналом U и сигналом обратной связи становится пренебрежимо малой. Благодаря этому обеспечивается соответствие скорости вращения S7 электродвигателя задающему сигналу U
Для обработки другого кулачка распределительного вала стол 4 перемещают (в плоскости фиг. ) так, чтобы установить этот кулачок против шлифовального круга 2, а копирный ролик 7 вводят в контакт с соответствующим копиром. Профили всех копиров одинаковы. Поэтому, несмотря на то, что новый копир смещен относительно предыдущего на фазовый угол « , где , 2, 3, 4, зависимость угла качания копировального суппорта от угла поворота Ср шпинделя 6 остается прежней, В связи с этим процесс управления скоростью вращения 52 электродвигателя I1, или задающей подачей j, совпадает с описанным.
f2 ft
fS
фиг.г
Реферат
Комментарии