Способ работы мембранного привода с жесткими центрами - RU2623080C2
Код документа: RU2623080C2
Чертежи


Описание
Предлагаемое изобретение относится к области машиностроения, гидравлическим и пневматическим приводам, работающим от воздействия газа или жидкости.
Наиболее эффективно применение способа для двухмембранного привода.
Известны мембранные приводы с одной мембраной (см. Гуревич Д.Ф. Расчет и конструирование трубопроводной арматуры. М.: Машиностроение, 1964, с. 275-280), под которую подается рабочая среда. Мембрана соединена через закрепленный на ней жесткий центр со штоком, выполняющим функцию подвижного рабочего органа. Жесткий центр, применяемый в известных мембранных приводах как элемент устройства, выполняет функцию ограничения деформации центральной части мембраны относительно штока при силовом воздействии на нее, создаваемым рабочей средой.
Привод работает следующим образом. При повышении давления рабочей среды мембрана прогибается, перемещая шток. Величина перемещения штока задается силовым воздействием на мембрану от величины давления рабочей среды. Для мембраны с жестким центром силовое воздействие F определяется произведением давления р на эффективную площадь в соответствии с известным (см. Сысоев С.Н. Элементы гидравлического и пневматического оборудования: Учеб. пособие / Владим. гос. ун-т; Владимир, 2001, с. 32) выражением

где R - радиус мембраны; r - радиус жесткого центра.
При данном способе работы привода величина перемещения подвижного рабочего органа задается перед началом работы исключительно величиной давления рабочей среды, что ограничивает функциональные возможности привода и область его применения.
Известен способ работы мембранного привода (см. А.С. №427206, Бондарчука Л.С. и др., опубл. 05.05.74 г., БИ №17), в котором используют надмембранную полость, соединяя и разъединяя ее с дополнительной пневмолинией давления рабочей среды, увеличивая усилие возврата штока при снятии избыточного давления в подмембранной полости. Однако данный способ работы привода имеет ограниченные функциональные возможности, так как требуемое силовое воздействие на подвижный рабочий орган создают только величиной давления на мембрану.
Известен способ работы мембранного привода (см. Сысоев С.Н. Элементы гидравлического и пневматического оборудования: Учеб. пособие / Владим. гос. ун-т; Владимир, 2001, с. 80 и 81), где для получения требуемого направления силового воздействия и реализации перемещения штока используют эффективные площади мембран. Способ состоит в создании избыточного давления рабочей среды в камере корпуса, ограниченного двумя мембранами с жесткими центрами, имеющими различную площадь, соединенными со штоком, и перемещении штока относительно корпуса в направлении большей эффективной площади, которая составляет разность эффективных площадей мембран с жесткими центрами.
Данный способ расширяет функциональные возможности привода, так как позволяет перед началом работы привода задавать направление перемещения подвижного рабочего органа и величину силового воздействия на него от давления рабочей среды. Однако постоянство эффективной площади в процессе работы привода ограничивает его функциональные возможности.
Наиболее близким по технической сущности из известных является способ работы мембранного привода (см. патент №143729, Сысоева С.Н. и др., опубл. 27.07.2014 г., Бюл. №21), в котором в процессе функционирования используют эффективную площадь его мембран. В известных мембранных приводах повышение давления рабочей среды в рабочей камере сразу же приводит к перемещению подвижного рабочего органа. В данном устройстве перемещение подвижного органа начинается только при достижении в рабочей камере определенного давления, что определяет его конструктивное исполнение. Привод выполнен в виде корпуса с рабочей камерой, ограниченной двумя мембранами с жесткими центрами, соединенными со штоком. Причем площади жестких центров в исходном положении одинаковы, а один из них выполнен из двух составных частей с возможностью разъединения при определенном силовом воздействии на него от давления рабочей среды. Части жесткого центра удерживаются от разъединения магнитной защелкой. При подаче рабочей среды в рабочую камеру первоначально шток не перемещается, так как эффективные площади мембран одинаковы и силовые воздействия на него с противоположных сторон от мембран равны. При достижении в рабочей камере определенного давления рабочей среды силовое воздействие от него разъединяет части жесткого центра и эффективная площадь мембраны уменьшается. Это приводит к перемещению штока в направлении мембраны с большим по площади жестким центром.
Данный способ работы мембранного привода расширяет его функциональные возможности за счет реализации дополнительной зависимости величины перемещения подвижного рабочего органа от давления рабочей среды в рабочей камере. Однако в данном приводе эффективная площадь мембраны изменяется только ступенчато, причем уменьшается. Отсутствие регулирования эффективной площади мембран в процессе работы привода не позволяет получать разнообразные, требуемые в процессе работы зависимости величины перемещения подвижного рабочего органа, включая изменение направления перемещения штока. Кроме этого при данном способе работы нельзя получить перемещение штока при постоянной величине давления рабочей среды в рабочей камере.
Таким образом, данный способ работы и все известные ограничивают функциональные возможности мембранного привода.
Задачей изобретения является расширение функциональных возможностей мембранных приводов путем регулирования эффективной площади мембран.
Поставленная задача достигается тем, что в способе работы мембранного привода, состоящем в создании избыточного давления рабочей среды в камере корпуса, ограниченной одной или двумя мембранами с жесткими центрами, соединенными со штоком, и перемещении штока относительно корпуса в направлении большей эффективной площади, управляют направлением и величиной перемещения штока регулированием эффективной площади.
Примеры применения предлагаемого способа показаны на фиг. 1-3.
На фиг. 1 показаны этапы работы одномембранного привода.
Устройство состоит из корпуса 1 с рабочей камерой, ограниченной мембраной 2, соединенной со штоком 3. На штоке размещена пластина 4, выполняющая функцию жесткого центра, установленная с возможностью перемещения вдоль него приводным механизмом 5 с рабочим ходом lx.
В исходном положении (фиг. 1, а), когда в рабочей камере давление р=0, шток имеет координату относительно корпуса Х0.
При повышении давления р>0 в рабочей камере создается и повышается силовое воздействие от него на шток (фиг. 1, б).
Мембрана прогибается, перемещая шток вверх на величину X1 (фиг. 1, в). При величине давления р1 создается силовое воздействие F1, которое определяется произведением давления на эффективную площадь мембраны. Силовое взаимодействие пластины 4 с мембраной препятствует изгибной деформации мембраны. Увеличивается эффективная площадь.
Перемещение пластины 4 приводным механизмом 5 и отведение ее от мембраны (фиг. 1, г) приводит к уменьшению эффективной площади мембраны, уменьшению силового воздействия на шток (F2
Таким образом в одномембранном приводе осуществляют управление направлением и величиной перемещения штока путем регулирования эффективной площади мембраны.
Предлагаемое изобретение может быть реализовано двухмембранным приводом, этапы работы которого показаны на фиг. 2.
Устройство состоит из корпуса 1 с рабочей камерой, ограниченной мембранами 2 и 3, соединенными со штоком 4. Снаружи камеры со стороны мембраны 2 на штоке размещена пластина 5, выполняющая функцию жесткого центра мембраны 2, установленная с возможностью перемещения вдоль него приводным механизмом 6 с рабочим ходом lx 1.
Снаружи камеры со стороны мембраны 3 на штоке размещена пластина 7, выполняющая функцию жесткого центра мембраны 3, установленная с возможностью перемещения вдоль него приводным механизмом 8 с рабочим ходом lx 2.
В исходном положении (фиг. 2, а), когда давление в рабочей камере равно нулю, силы F1 и F2 равны нулю, результирующая сила F равна нулю, шток занимает положение хш=0.
При увеличении давления в рабочей камере (фиг. 2, б) появляются и увеличиваются силы F1 и F2, действующие на шток в вертикальном направлении. Однако, так как эффективные площади мембран равны, то F1равно F2. Результирующая сила F равна нулю и шток не перемещается и остается в исходном положении.
Отведение пластины 7 от мембраны 3 приводным механизмом 8 (фиг. 2, в) приводит к уменьшению эффективной площади мембраны 3 и изменению силового воздействия на шток (F2
Отведение пластины 5 приводным механизмом 6 от мембраны 2 (фиг. 2, г) при исходном положении пластины 7 приводит к уменьшению эффективной площади мембраны 2 и изменению силового воздействия на шток (F2>F1). Создается результирующая сила F, действующая на шток и перемещающая его вниз в координату -хшт.
Таким образом в двухмембранном приводе осуществляют управление направлением и величиной перемещения штока путем регулирования эффективной площади мембран.
Предложенный способ позволяет управлять направлением и величиной перемещения штока без изменения величины давления в рабочей полости привода регулированием эффективной площади.
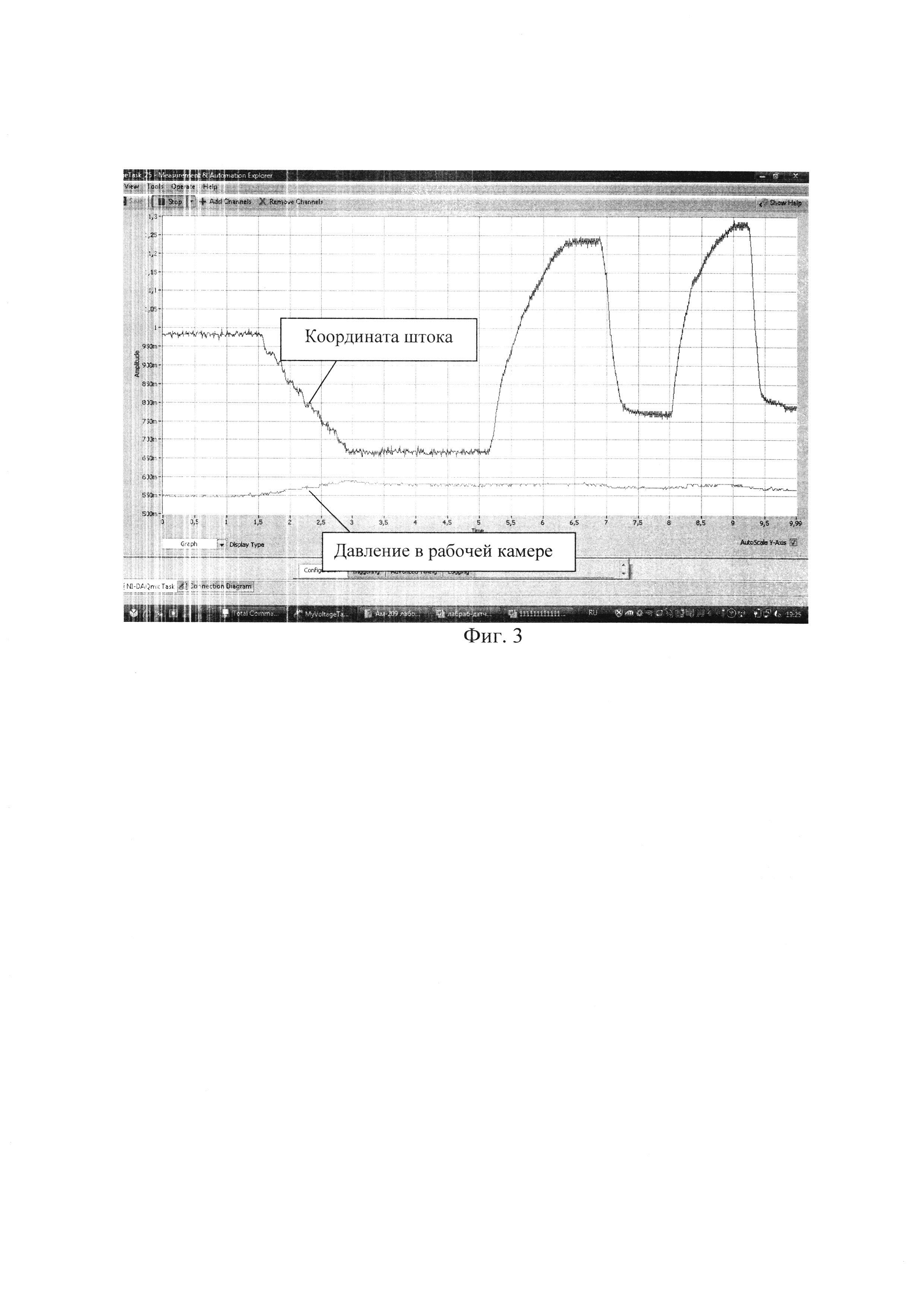
Пример результатов натурных исследований показан на фиг. 3, где координата штока изменяется как по величине, так и по направлению перемещения при неизменном давлении рабочей среды в камере привода.
Таким образом, предлагаемый способ значительно расширяет возможность реализации разнообразных законов перемещения подвижного рабочего органа привода, включая управление приводом без изменения величины давления в рабочей камере.
В лаборатории СКБ «Поиск» Владимирского государственного университета исследован предлагаемый способ работы мембранных приводов, натурные испытания которого показали его работоспособность и эффективность.
Реферат
Изобретение относится к области машиностроения, гидравлическим и пневматическим приводам, работающим от воздействия газа или жидкости. Наиболее эффективно применение способа для работы двухмембранного привода. Задачей изобретения является расширение функциональных возможностей мембранных приводов путем регулирования эффективной площади мембран. Поставленная задача достигается тем, что в способе работы мембранного привода с жесткими центрами, состоящем в создании избыточного давления рабочей среды в камере корпуса, ограниченной одной или двумя мембранами с жесткими центрами, соединенными со штоком, и перемещении штока относительно корпуса в направлении большей эффективной площади, управляют направлением и величиной перемещения штока изменением эффективной площади мембран, регулируя площади хотя бы одного жесткого центра. Предлагаемый способ значительно расширяет возможность реализации разнообразных законов перемещения подвижного рабочего органа привода, включая изменение направления его перемещения при однонаправленном изменении давления рабочей среды, а также управление приводом без изменения величины давления в рабочей камере. 3 ил.
Комментарии