Устройство для автоматической установки и демонтажа инструментов на роботе - RU2342244C2
Код документа: RU2342244C2
Чертежи












Описание
Предпосылки создания изобретения
Настоящее изобретение относится к устройствам для автоматической установки и демонтажа инструментов на роботе с манипулятором.
Инструменты, установленные на манипуляторе, должны регулярно заменяться для изменения вида используемого инструмента, его характеристик или просто замены изношенного инструмента на новый.
Инструменты, которых касается изобретение, снабжены осевым отверстием для установки на штыре для вращения инструмента, в частности это щетки и шлифовальные круги.
Описание предшествующего уровня техники
В существующем уровне техники различные виды инструментов устанавливают на направляющих, оканчивающихся на нижнем конце V-образной частью для центрирования инструмента в положении для автоматической установки на манипуляторе. На нижнем конце направляющих расположены датчики для определения положения отверстия для установки инструмента.
Для каждого вида инструмента предусмотрено также средство хранения и изъятия частично изношенных инструментов, снабженное датчиками, предоставляющими информацию о наличии частично изношенного инструмента и его положении.
Этот известный способ имеет ряд недостатков:
направляющие, наклоненные под углом 45°, являются относительно длинными для того, чтобы поддерживать десять или более инструментов, и вместе с соответствующими средствами хранения они занимают относительно большой объем пространства вокруг робота;
пять или шесть датчиков используется для каждого вида инструмента, что составляет в общей сложности от пятидесяти до шестидесяти датчиков для десяти видов. Поскольку каждый датчик связан с устройством ввода робота, робот должен иметь дополнительную панель ввода-вывода, которая является достаточно дорогой (обычно две тысячи евро);
когда инструментами являются щетки, они могут деформироваться в большей или меньшей степени из-за своей гибкости, и их размещение на V-образной части на конце направляющих не всегда является достаточным для их точного расположения, позволяющего автоматическую установку на манипуляторе. В этом случае автоматическая установка срывается и оператор вынужден вмешаться.
Путем изучения времени работы робота было замечено также, что время ожидания замены инструмента равно или больше времени использования, составляющего около шести минут для абразивной щетки, оператор, который должен запустить у робота программу обработки, возвращается и осуществляет ручные действия на своем рабочем месте.
Одной из целей настоящего изобретения является преодоление этих недостатков.
Сущность изобретения
Для этой цели изобретением предлагается устройство для автоматической установки и демонтажа инструментов на роботе, содержащее средства для хранения ряда одинаковых инструментов и средства для центрирования инструмента в положении для автоматической установки на роботе, каждый инструмент содержит осевое отверстие для установки на вращающемся штыре, предусмотренном на роботе, средства хранения содержат поверхность, которая служит опорой для штабеля инструментов, и средства для центрирования штабеля инструментов, состоящие из перемещаемого в осевом направлении цилиндрического стержня, входящего в осевые отверстия инструментов штабеля, указанная опорная поверхность содержит отверстие, через которое проходит указанный штырь, расположенное на оси штабеля инструментов и соединенное прорезью с краем указанной опорной поверхности так, что указанный штырь может входить в отверстие опорной поверхности и в осевое отверстие самого нижнего инструмента штабеля путем выталкивания цилиндрического центрирующего стержня и затем может быть перемещен в поперечном направлении в указанной прорези для удаления этого инструмента из средств хранения.
В устройстве в соответствии с изобретением сложенные в штабель инструменты точно центрированы на опорной поверхности с использованием стержня, входящего в их осевые отверстия, независимо ни от каких деформаций этих инструментов из-за их гибкости (в случае щеток). Такое точное центрирование исключает риск срыва автоматической установки на роботе. Более того, хранение инструментов в вертикальных штабелях означает, что устройство занимает значительно меньше места вокруг робота.
В соответствии с признаком изобретения опорная поверхность для инструментов установлена так, чтобы скользить в направлении штабелирования инструментов, и связана с датчиком для обнаружения ее движения и со второй опорной поверхностью для инструментов, расположенной под первой поверхностью и имеющей в основном такую же конструкцию. Подвижность первой опорной поверхности делает возможным, во-первых, проверить наличие инструмента на штыре, во-вторых, проверить наличие инструментов в средствах хранения и, наконец, создать нишу для размещения частично изношенных инструментов между первой и второй опорными поверхностями, датчик также обеспечивает возможность проверки наличия частично изношенного инструмента в этой нише.
В устройстве в соответствии с изобретением достаточно одного датчика для обнаружения перемещений первой опорной поверхности для того, чтобы информировать робота о том, правильно или нет установлен инструмент на вращающемся штыре, есть или нет новые инструменты в средствах хранения и есть или нет частично изношенные инструменты между двумя опорными поверхностями.
Когда десять или около того устройств в соответствии с изобретением расположены вокруг робота, десять соответствующих датчиков могут быть связаны с роботом без необходимости иметь дополнительное устройство ввода-вывода. Это приводит к значительному снижению издержек.
Также предлагается способ автоматической установки и демонтажа инструментов на роботе, таком как манипулятор, посредством устройства в соответствии с изобретением, причем способ содержит стадии:
подведения штыря робота в заранее установленное положение под осью штабеля инструментов;
перемещения штыря вдоль оси для ввода его в осевое отверстие самого нижнего инструмента штабеля путем выталкивания центрирующего стержня; и
перемещения штыря в направлении от штабеля инструментов для вывода инструмента из средств хранения.
Способ в соответствии с изобретением также предоставляет возможность демонтажа частично изношенного инструмента и изъятия частично изношенного инструмента и содержит стадии:
подведения этого инструмента под первую опорную поверхность; и
толкания первой опорной поверхности для инструментов, используя инструмент, установленный на штыре, для перемещения ее от второй опорной поверхности для инструментов и
перемещения штыря в направлении, параллельном опорным поверхностям, для размещения инструмента между этими опорными поверхностями; и
перемещения штыря по оси в направлении от штабеля инструментов для того, чтобы удалить изношенный инструмент и оставить его между двумя опорными поверхностями.
Более того, только небольшое число положений штыря в пространстве, заранее установленных и хранящихся в памяти, необходимо для программирования перемещений манипулятора для того, чтобы автоматически устанавливать и демонтировать новые инструменты и частично изношенные инструменты.
Краткое описание чертежей
Другие преимущества и признаки изобретения станут ясны после прочтения нижеследующего описания, приведенного в качестве неограничивающего примера, со ссылкой на прилагаемые чертежи, на которых:
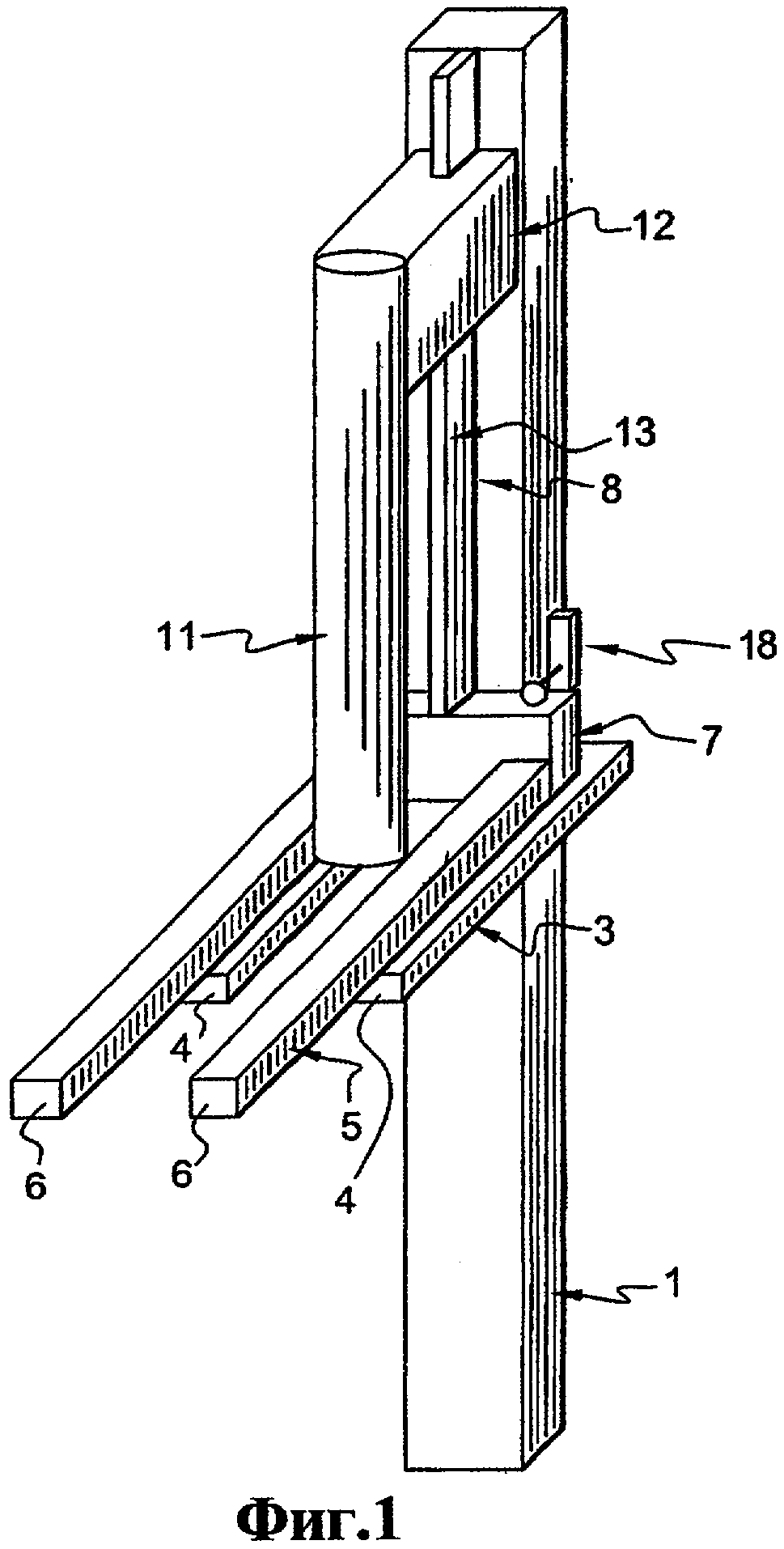
фиг.1 представляет собой схематический вид устройства в соответствии с изобретением;
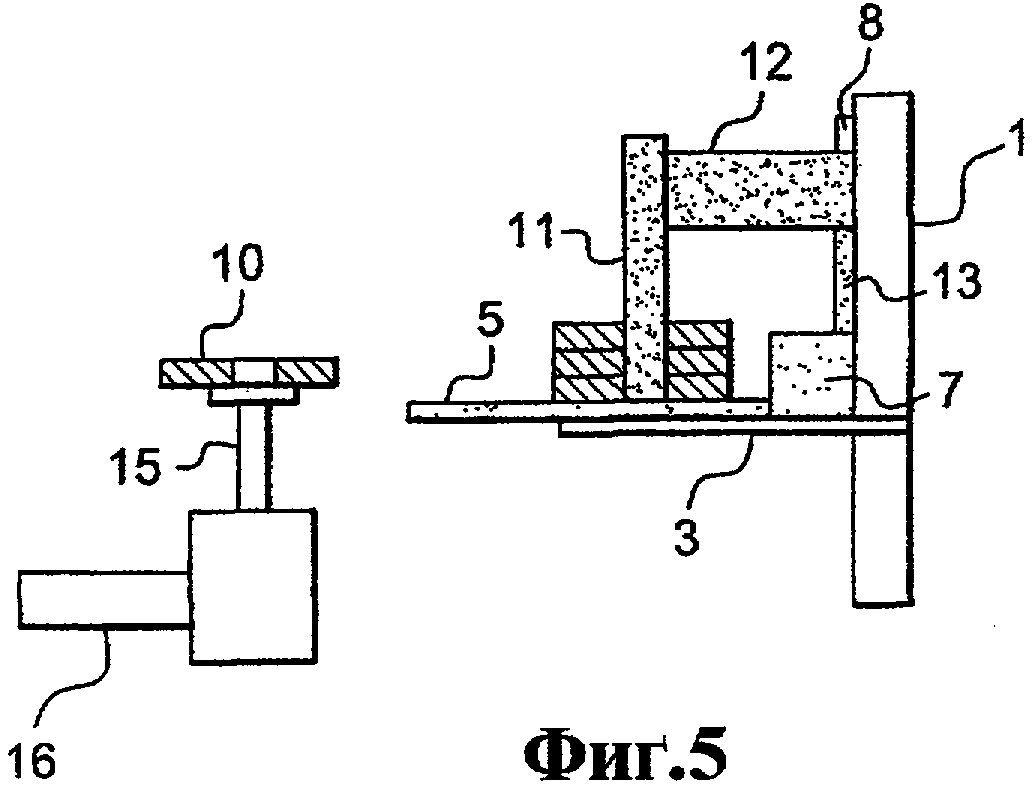
фиг.2-5 представляют собой схематический вид сбоку, отображающий работу устройства в соответствии с изобретением во время установки инструмента;
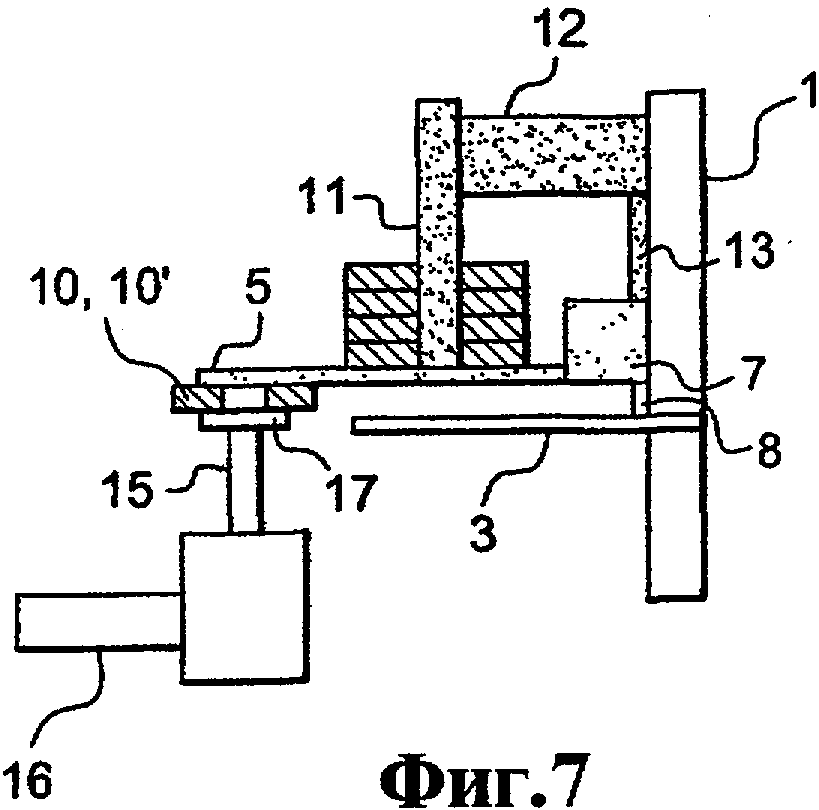
фиг.6-9 представляют собой схематический вид сбоку, отображающий работу устройства в соответствии с изобретением во время демонтажа частично изношенного инструмента;
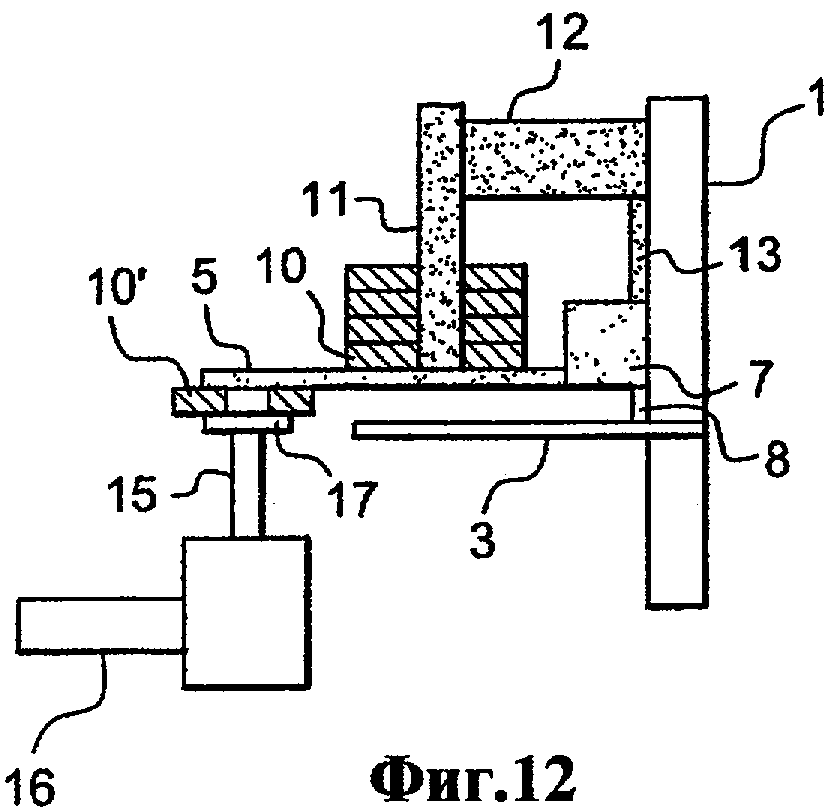
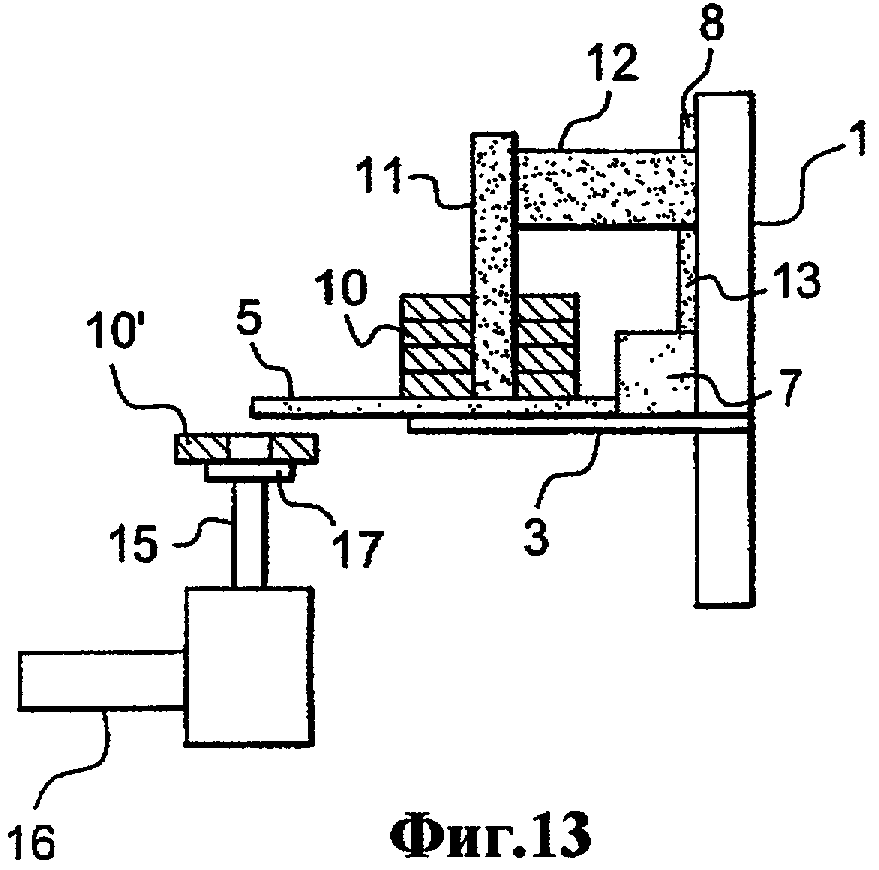
фиг.10-13 представляют собой схематический вид сбоку, отображающий работу устройства в соответствии с изобретением во время установки частично изношенного оборудования;
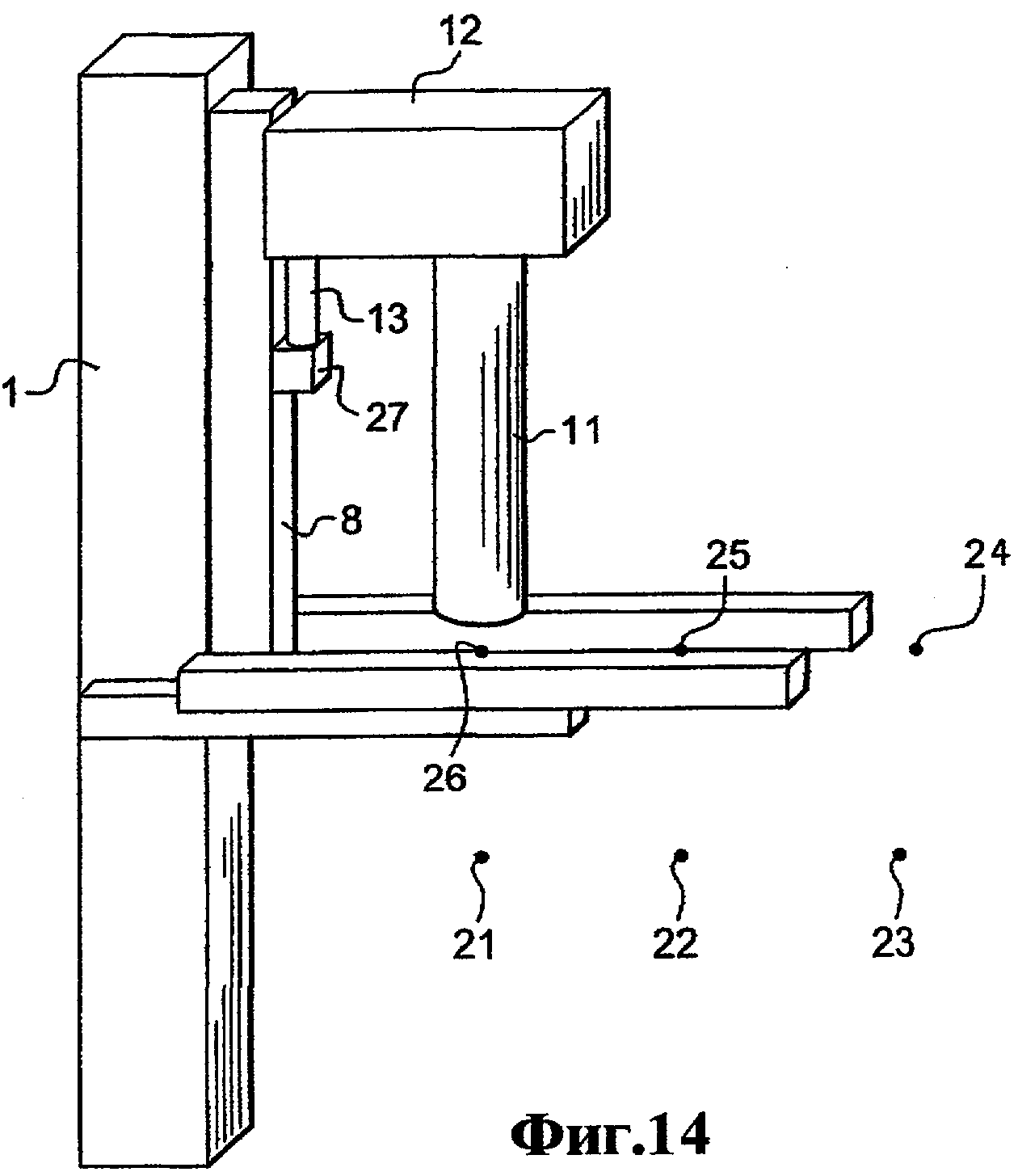
на фиг.14 схематично показаны положения, определяющие запрограммированный путь штыря робота в способе согласно изобретению;
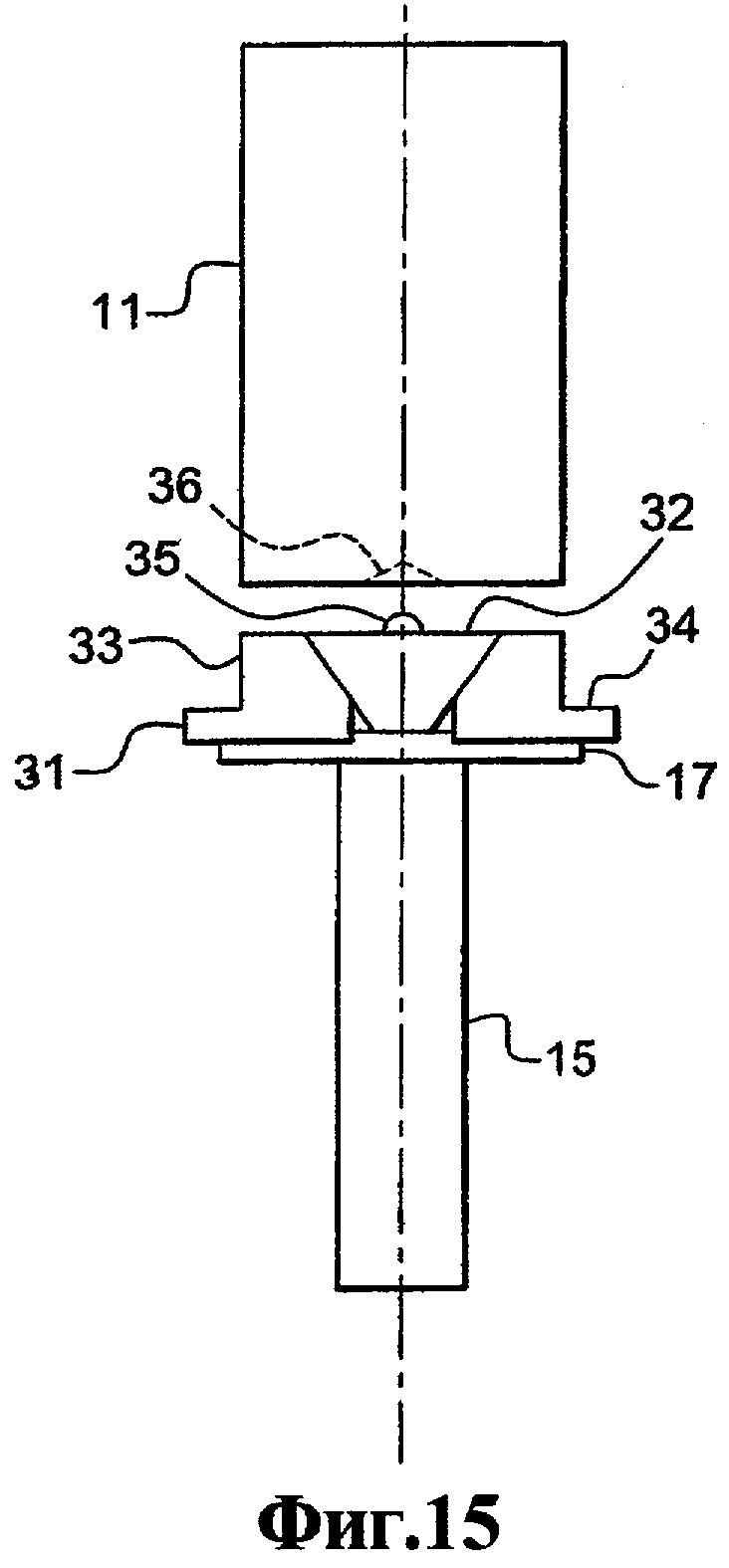
фиг.15 и 16 представляют собой схематический вид, изображающий штырь робота и средства для выравнивания по отношению к центрирующим средствам устройства согласно изобретению;
фиг.17 представляет собой увеличенный схематический вид в осевом сечении части центрируюших средств устройства согласно изобретению;
фиг.18-22 представляют собой схематический вид сбоку, отображающий работу устройства во время установки инструмента, устройство имеет систему, показанную на фиг.17.
Описание предпочтительных вариантов осуществления изобретения
На фиг.1 схематично показан вариант осуществления устройства в соответствии с изобретением.
Это устройство в основном предназначено для хранения новых инструментов, таких как щетки или шлифовальные круги, и сконструировано так, чтобы были возможны автоматическая установка и демонтаж этих инструментов на манипуляторе со штырем для вращения инструмента.
Устройство содержит средства хранения, включающие вертикальную стойку 1, прикрепленную к полу или к стене соответствующими средствами, на которой неподвижно установлена горизонтальная опора 3 в форме вилки, содержащая две параллельные консоли 4, простирающиеся в одном направлении от вертикальной стойки 1 и отделенные друг от друга расстоянием, меньшим, чем диаметр инструментов, предназначенных для хранения в устройстве в соответствии с изобретением, и большим, чем диаметр штыря манипулятора, на котором эти инструменты должны быть установлены, как будет более ясно видно ниже.
Другая опора 5, также в форме вилки, установлена так, чтобы скользить вертикально по вертикальной стойке 1 над неподвижной опорой 3, и содержит две параллельные консоли 6, соединенные вместе на концах со стороны вертикальной стойки 1 поперечной перекладиной 7.
Горизонтальные консоли 6 отделены друг от друга расстоянием, в основном равным расстоянию, разделяющему консоли 4 неподвижной опорной поверхности 3, и они длиннее, чем консоли 4, так что они выступают за консоли 4 с дальней от вертикальной стойки 1 стороны.
Поперечная перекладина 7 первой опорной поверхности 5 направляется по мере ее скольжения по вертикальному рельсу 8, который прикреплен или образован на соответствующей поверхности вертикальной стойки 1 и который проходит вверх от второй неподвижной опорной поверхности 3.
Первая опорная поверхность 5 предназначена служить опорой для штабеля инструментов 10, как показано на фиг.2 и далее, эти инструменты идентичны и сложены вертикально один на другой, самый нижний инструмент в штабеле опирается на две консоли 6 опоры 5, которая сама опирается на две консоли 4 второй неподвижной опорной поверхности 3 так, что осевые отверстия этих инструментов, которые делают возможной их установку на штыре манипулятора, расположены между двумя консолями 4 второй неподвижной опорной поверхности 3 и между двумя консолями 6 первой опорной поверхности 5.
Устройство в соответствии с изобретением также содержит средства для центрирования инструментов, сложенных на первой опорной поверхности 5, эти центрирующие средства содержат вертикальный цилиндрический стержень 11, который проходит над первой опорной поверхностью 5 и верхний конец которого несет горизонтальная консоль 12, направляемая при перемещении по вертикальному рельсу стойки 1.
Вертикальная перекладина 1, образующая распорку или клин, проходит вниз от горизонтальной консоли 12 к поперечной перекладине 7 первой опорной поверхности 5 для ограничения перемещения вниз консоли 12 так, что нижний конец цилиндрического стержня 11 в его самом нижнем положении находится в основном на одном уровне с верхней поверхностью консолей 6 первой опорной поверхности 5.
Диаметр цилиндрического стержня 11 немного меньше диаметра осевого отверстия инструментов 10, так что они могут складываться в штабель и при этом точно центрироваться по оси стержня 11. Точность такого центрирования составляет, например, около одного или двух миллиметров.
Устройство в соответствии с изобретением в приведенном примере дает возможность хранить на первой опорной поверхности 5 штабель из четырех инструментов 10, хотя их число может быть больше и определяется длиной центрирующего стержня 11 и соответствующей протяженностью вертикальной стойки 1 над второй неподвижной опорной поверхностью 3.
Инструменты 10, сложенные на первой опорной поверхности 5, в этом варианте осуществления представляют собой новые инструменты.
На фиг.2-5 схематично показано, как манипулятор берет один из таких инструментов.
На фиг.2 манипулятор 16, имеющий штырь 15 для установки и вращения инструмента 10, подводится под неподвижную опору 3 так, что штырь 15 ориентирован вертикально вверх и расположен соосно с осью стержня 11 для центрирования инструментов 10.
Инструменты 10 образуют штабель, точно центрированный на первой опорной поверхности 5 своими осевыми отверстиями, через которые проходит стержень 11, нижний конец которого находится на одном уровне с нижней стороной самого нижнего инструмента 10 штабеля.
На следующем этапе, показанном на фиг.3, манипулятор 16 перемещен вертикально вверх так, что верхний конец штыря 15 вошел между горизонтальными консолями опор 3 и 5 и находится внутри осевого отверстия самого нижнего инструмента 10 штабеля. В этом положении центрирующий стержень 11 устройства в соответствии с изобретением вытолкнут вверх верхним концом штыря 15 и нижний конец стержня 11 находится на границе между самым нижним инструментом 10 штабеля и инструментом, расположенным в штабеле сразу над ним.
Штырь 15 имеет кольцевой фланец 17 на расстоянии от своего верхнего конца, равный толщине инструмента 10. В положении, показанном на фиг.3, этот кольцевой фланец 17 давит на нижнюю сторону инструмента 10 и конец штыря 15 находится на границе между двумя самыми нижними инструментами 10 штабеля.
Как показано на фиг.4, следующий этап заключается в перемещении манипулятора 16 горизонтально в направлении, параллельном консолям опор 3 и 5, для удаления инструмента 10, размещенного на конце штыря 15, из штабеля. Когда этот инструмент удален, центрирующий стержень 11 освобождается от инструмента 10, размещенного на штыре 15, и падает вниз на уровень первой опорной поверхности 5, затем, как показано на фиг.5, оставшиеся в штабеле инструменты 10 сами перемещаются вниз на первую опорную поверхность 5, оставаясь центрированными стержнем 11.
Существует возможность проверить наличие инструмента 10 на конце штыря 15 следующим образом, описанным со ссылкой на фиг.6 и 7.
На фиг.6 манипулятор 16 перемещен вниз и подведен к устройству согласно изобретению так, что инструмент 10, установленный на штыре 15, находится под свободными концами консолей 6 первой опорной поверхности 5, эти свободные концы выступают за свободные концы консолей 4 второй неподвижной опорной поверхности 3, как уже указано.
Манипулятор затем перемещают вверх, как показано на фиг.7. Если инструмент 10 установлен на конце штыря 15, этот инструмент нажмет на нижнюю сторону концов консолей 6 и переместит опору 5 вверх от неподвижной опоры 3. Это перемещение может быть обнаружено посредством датчика 18, установленного для этой цели на вертикальной стойке 1 и показанного на фиг.1. Это подтвердит, во-первых, наличие инструмента 10 на штыре 15 манипулятора, а также подтвердит впоследствии, что по меньшей мере один новый инструмент хранился в устройстве в соответствии с изобретением, когда манипулятор 16 выполнял маневры по взятию инструмента, показанные на фиг.2-5.
Если на штыре 15 манипулятора нет инструмента 10, верхний конец штыря перемещается между консолями 6 опоры 5, не поднимая ее, и датчик, связанный с опорой 5, не обнаруживает ее перемещения вверх. Это подтверждает тот факт, что в устройстве согласно изобретению не было инструмента 10, когда манипулятор выполнял перемещения, показанные на фиг.2-5, и устройство вырабатывает сигнал для того, чтобы предупредить оператора.
Когда инструмент, установленный на штыре 15 манипулятора, должен быть демонтирован при его частичном износе, он возвращается обратно в устройство согласно изобретению и хранится в нем следующим образом, описанным со ссылкой на фиг.6-9.
Первые два этапа, показанные на фиг.6 и 7, являются теми же, что описаны, манипулятор 16 приводит частично изношенный инструмент 10' под свободные концы консолей опоры 5, затем его перемещают вверх так, что инструмент 10' давит на консоли опоры 5 и толкает их вверх, перемещая от неподвижной опоры 3 на расстояние, большее, чем толщина инструмента 10'.
Следующий этап, показанный на фиг.8, заключается в перемещении манипулятора 16 по горизонтали для того, чтобы поместить инструмент 10' на ось центрирующего стержня 11, но между опорами 3 и 5. Манипулятор 16 затем перемещают вертикально вниз для того, чтобы вытащить верхний конец штыря 15 из центрального отверстия инструмента 10', удерживаемого между опорами 3 и 5.
Теперь можно поместить частично изношенный инструмент обратно в устройство согласно изобретению, не перемешивая его с новыми инструментами, которые сложены на опоре 5.
Этот частично изношенный инструмент 10' предназначен быть изъятым манипулятором 16 в первую очередь, предшествуя новым инструментам 10, сложенным на опоре 5.
Это осуществляется посредством следующей процедуры, показанной на фиг.10-13. На фиг.10 манипулятор 16 подводится под неподвижную опору 3 так, что штырь 15 направлен вертикально вверх и расположен соосно со стержнем 11 для центрирования инструментов 10.
На следующем этапе, показанном на фиг.11, манипулятор 16 перемещают вертикально вверх так, что верхний конец штыря 15 входит между горизонтальными консолями опоры 5 и находится внутри осевого отверстия частично изношенного инструмента 10'. Манипулятор 16 переместит опору 5 немного вверх, используя инструмент 10', для облегчения удаления этого инструмента из средств хранения.
Как показано на фиг.12, следующий этап заключается в перемещении манипулятора 16 горизонтально в направлении, параллельном консолям опор 3 и 5, для удаления инструмента 10', установленного на конце штыря 15.
Кроме того, можно проверить наличие инструмента 10' на конце штыря 15 так же, как описано выше со ссылкой на фиг.6 и 7.
Предпочтительно определить положения штыря 15 в пространстве и сохранить их в памяти так, чтобы запрограммировать перемещения манипулятора 16 для автоматической установки и демонтажа инструментов 10.
Необходимо определить и запомнить всего шесть положений, показанных на фиг.14, включающих три нижних положения 21, 22 и 23 и три верхних положения 24, 25 и 26, распределенные по прямоугольной траектории и размещенные в вертикальном направлении соосно по парам. Эти шесть положений дают возможность запрограммировать все перемещения манипулятора для выполнения описанных выше маневров.
Так, для установки нового инструмента 10 или частично изношенного инструмента 10' на штыре 15 указанный штырь проходит через положения 21, 26 и 24.
Для проверки наличия инструмента 10 на штыре 15 указанный штырь проходит через положения 22 и 25.
Наконец, для демонтажа частично изношенного инструмента 10', установленного на штыре 15, указанный штырь проходит через положения 22, 25, 26 и 21.
Более того, на фиг.14 показан вариант осуществления изобретения, в котором вертикальная перекладина 13, ограничивающая опускание стержня 11, установлена между горизонтальной консолью 12 и ограничителем 27, прикрепленным к рельсу 8 или к стойке 1.
На фиг.15 и 16 показан тип штыря, который может быть использован с устройством согласно изобретению.
На конце цилиндрический штырь 15 содержит кольцевой фланец 17, на котором установлены средства для крепления инструмента 10, содержащие по меньшей мере две губки 31, расположенные радиально напротив друг друга по отношению к оси штыря 15, и предпочтительно три губки 31, расположенные под углом 120° по окружности кольцевого фланца 17.
Губки 31 расположены вокруг перемещаемого в осевом направлении и выполненного в форме усеченного конуса элемента 32 на конце штыря 15, что вынуждает губки 31 перемещаться в поперечном направлении, чтобы сделать возможным закрепление инструмента 10 методом зажима.
Каждая губка имеет цилиндрический край 33 для ввода в осевое отверстие инструмента и кольцевой фланец 34, посредством которого она соединяется впритык с инструментом.
Элемент 32 в форме усеченного конуса имеет осевой палец 35, образованный на его торцевой поверхности, этот палец может быть закруглен, как показано на фиг.15 и 16. Этот палец 35 предназначен для того, чтобы входить в маленькую коническую осевую полость 36 в нижней торцевой поверхности стержня 11 для улучшения совмещения штыря 15 со стержнем 11.
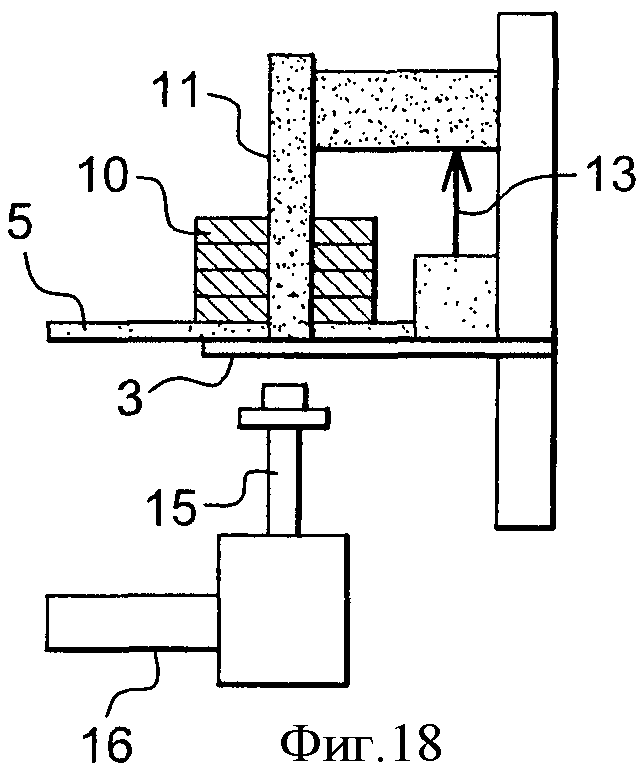
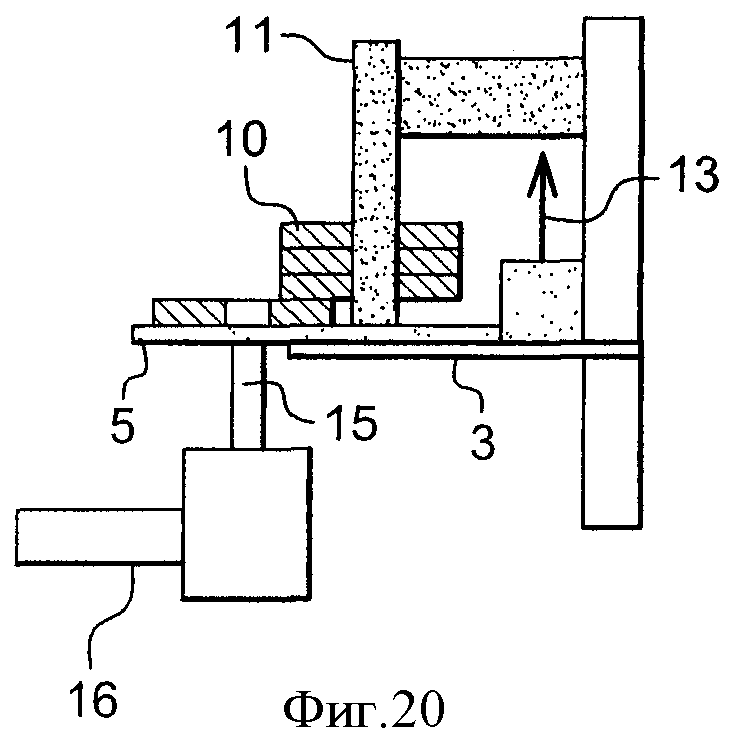
На фиг.17 показаны средства для облегчения удаления инструмента 10 из штабеля в средствах хранения. На этом чертеже стержень 11 является трубчатым и содержит на нижнем конце микротолкатель 40, например, пневматического типа, установленный на основании 41 стержня 11 и питаемый через гибкий трубопровод 42. Поршневой стержень 43 микротолкателя проходит через осевое отверстие 44 стержня 11 и выступает наружу от него, когда на микротолкатель 40 подается питание. Когда давление на микротолкателе 40 сбрасывается, поршень 43 втягивается внутрь центрирующего стержня 11. Положение микротолкателя 40 вдоль оси стержня 11 установлено таким образом, что поршневой стержень 43 находится на одном уровне с предпоследним инструментом в штабеле, когда стержень 11 находится в нижнем положении. Этот микротолкатель функционирует так, как описано ниже.
На фиг.18 манипулятор 16 робота со штырем 15 для установки и вращения инструмента 10 подводится под неподвижную опору 3 так, что штырь 15 направлен вертикально вверх и расположен соосно с осью стержня 11 для центрирования инструментов 10.
Когда подается питание на микротолкатель, это заставляет поршневой стержень 43 выйти в радиальном направлении, блокируя предпоследний инструмент штабеля на стержне 11.
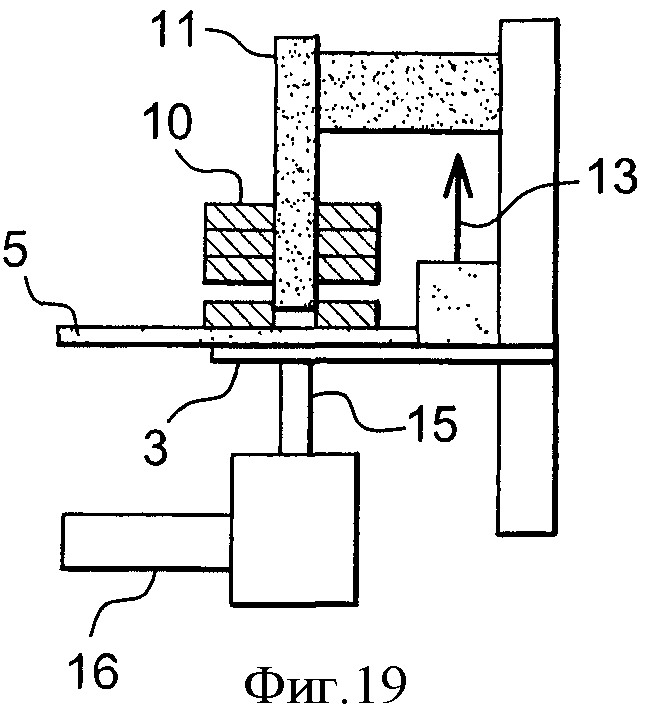
На следующем этапе, показанном на фиг.19, манипулятор 16 переместился вертикально вверх так, что верхний конец штыря 15 входит между горизонтальными консолями опор 3 и 5 и находится внутри осевого отверстия самого нижнего инструмента 10 штабеля. В этом положении центрирующий стержень 11 устройства согласно изобретению вытолкнут обратно вверх верхним концом штыря 15 и поднимает предпоследний инструмент 10 штабеля для того, чтобы переместить его по оси от последнего инструмента 10, установленного на штыре 15.
Как показано на фиг.20, следующий этап заключается в перемещении манипулятора 16 горизонтально в направлении, параллельном опорным консолям 3 и 5, для удаления из штабеля самого нижнего инструмента 10, установленного на штыре 15. Когда этот инструмент 10 удаляется, он не задевает предпоследний инструмент в штабеле, который удерживается на расстоянии от него стержнем 11 и микротолкателем 40. Затем стержень 11 возвращается обратно вниз, как показано на фиг.21, давление на микротолкателе 40 сбрасывается, освобождая штабель инструментов, который возвращается обратно вниз на опору 5, как показано на фиг.22.
В другом варианте осуществления изобретения (не показан) центрирующий стержень 11 установлен так, чтобы вращаться на горизонтальной консоли 12 вокруг горизонтальной оси, перпендикулярной стержню 11 и консоли 12, так, чтобы он мог вращаться вокруг этой оси, когда самый нижний инструмент 10 убирается из штабеля, если это удаление оказывает на стержень 11 усилие, большее, чем заранее установленное значение (например, установленное посредством воздействия поперечной силы на образец). Таким образом можно предотвратить случайное вытаскивание стержня 11. Предусмотрены такие средства, как датчик, так что вращение стержня 11 запускает сигнал для предупреждения оператора.
Реферат
Настоящее изобретение относится к устройствам для автоматической установки и демонтажа инструментов на роботе с манипулятором. Инструменты, установленные на манипуляторе, регулярно заменяют для изменения вида используемого инструмента, его характеристик или просто замены изношенного инструмента на новый. Инструменты, которых касается изобретение, снабжены осевым отверстием для установки на штыре для вращения инструмента, в частности это щетки и шлифовальные круги. Устройство содержит средства для хранения ряда одинаковых новых инструментов, вследствие чего устройство занимает меньше места вокруг робота, и средства для центрирования одного из инструментов в положении для автоматической установки на роботе, позволяющие исключить риск срыва автоматической установки. При этом каждый инструмент содержит осевое отверстие для установки на вращающемся штыре, предусмотренном на роботе. 2 н. и 13 з.п. ф-лы, 22 ил.
Комментарии