Станция для обработки конструктивных элементов воздушного судна - RU2617468C2
Код документа: RU2617468C2
Чертежи


Описание
Область техники, к которой относится изобретение
Изобретение относится к станции для обработки конструктивных элементов воздушного судна с признаками, указанными в ограничительной части пункта 1 формулы изобретения.
Уровень техники
Изготовление летальных аппаратов, в частности воздушных судов, включает обработку больших конструктивных элементов, например крыла и фюзеляжа или их деталей, на специальных станциях для обработки. На такой станции для обработки необходимые соединения конструктивного элемента воздушного судна осуществляются, например, при помощи заклепочной машины. Особенность данной области техники заключается в том, что эти конструктивные элементы воздушного судна, которые являются обычно очень большими и тяжелыми, приходится поворачивать и перемещать таким образом, чтобы заклепочная машина могла нанести соответствующие заклепочные соединения. Для этого требуется обеспечить возможность свободного перемещения обрабатываемых конструктивных элементов воздушного судна на станции для обработки.
В US 8220134 В2 описан вариант осуществления станции для обработки известного уровня техники, содержащей две позиционирующие опоры, между которыми в продольном направлении установлена зажимная рама для обрабатываемого конструктивного элемента воздушного судна. Позиционирующие опоры служат для соответствующего позиционирования зажимной рамы и, следовательно, также конструктивного элемента воздушного судна, чтобы обеспечить доступ заклепочной машины ко всем соответствующим рабочим точкам конструктивного элемента воздушного судна. Для этой цели позиционирующие опоры содержат фиксатор, который установлен с возможностью перемещения в вертикальном направлении, называемом в данном случае направлением Z, и на который опирается зажимная рама. Наряду с обеспечиваемым таким образом основным перемещением приемной рамы по высоте при помощи различного вертикального позиционирования фиксатора можно дополнительно запрокидывать приемную раму и установленный на ней конструктивный элемент воздушного судна, что также называется поворотом относительно оси В. При этом сами позиционирующие опоры также установлены с возможностью перемещения в горизонтальном направлении, также называемом направлением Y.
Кроме того, в указанном варианте осуществления позиционирующие опоры содержат один или по одному поворотному приводу для поворота фиксатора и, следовательно, также зажимной рамы. Такое поворотное движение относительно продольной оси зажимной рамы обычно называется также поворотом относительно оси А. Благодаря этой принципиальной конструкции обеспечивается достаточная гибкость позиционирования зажимной рамы, открывающая доступ для заклепочной машины, установленной С-образной станине, ко всем позициям, в которых необходимо установить заклепки. Обычно С-образная станина установлена с дополнительной возможностью перемещения между указанными двумя позиционирующими опорами. Направление, определяемое расстоянием между позиционирующими опорами, в данном случае называется направлением X.
Недостаток этого известного варианта осуществления заключается в том, что конструкция позиционирующих опор и, в частности, их соответствующих фиксаторов с приводом для поворота зажимной рамы является сложной и трудоемкой в изготовлении. При этом позиционирующие опоры должны не только выдерживать, как правило, очень большой вес непосредственно зажимной рамы и обрабатываемого конструктивного элемента воздушного судна, но так же, как указано выше, должны обеспечивать возможность вертикального перемещения и поворота при помощи фиксатора.
Для такого поворота зажимной рамы требуется не только соответствующий двигатель, но также и редуктор, чтобы при приемлемых размерах двигателя обеспечивать поворот зажимной рамы с установленным на ней конструктивным элементом воздушного судна. Кроме того, на фиксаторах необходимо предусмотреть шарнир, чтобы обеспечить возможность независимого вертикального перемещения фиксаторов вдоль позиционирующих опор.
В результате получается, что приводной механизм для поворота в направлении А должен иметь очень высокую сложность конструкции при относительно малом объеме и должен выдерживать большие нагрузки, что усугубляется общим весом и размерами позиционирующих опор. При этом вес и размеры позиционирующих опор являются особенно критичными, если предусмотрено их горизонтальное перемещение в направлении Y. Конструктивное исполнение для обеспечения перемещения таких больших масс является, соответственно, сложным и поэтому связано с высокими затратами. Кроме того, ширина позиционирующих опор - а также их длина в направлении X, которое соответствует направлению от одной позиционирующей опоры к другой - вносит вклад в общую длину станции для обработки в этом направлении.
Раскрытие изобретения
Вследствие вышеизложенного задача настоящего изобретения состоит в усовершенствовании станции для обработки конструктивных элементов воздушного судна известного уровня техники таким образом, чтобы при сохранении возможностей гибкого перемещения и позиционирования конструктивного элемента воздушного судна на станции для обработки сделать ее конструкцию более простой, компактной и экономичной.
Эта задача решена при помощи станции для обработки конструктивных элементов воздушного судна согласно ограничительной части пункта 1 формулы изобретения с признаками, указанными в отличительной части пункта 1 формулы изобретения.
Важным является тот факт, что по меньшей мере отдельные части механизма, который обеспечивает поворотное движение зажимной рамы, в данном случае, в частности, двигатель, могут быть сняты с позиционирующей опоры, в частности с узла перемещения, и установлены на зажимной раме. Таким образом, с одной стороны, благодаря перемещению различных компонентов разгружается ограниченное пространство у позиционирующей опоры, а с другой стороны, дополнительно используется пространство, так или иначе образованное зажимной рамой. Иными словами, там, где место ограничено, используется меньшее пространство, и, наоборот, там, где остается еще достаточное пространство, оно используется для размещения компонентов, которые переносятся с позиционирующей опоры. Таким образом, осуществляется четкое разделение компонентов в соответствии с их функцией.
В предпочтительном варианте осуществления согласно пункту 7 формулы изобретения эта конструкция усовершенствована дополнительно за счет того, что редуктор поворотного привода не только удаляется с позиционирующей опоры и также устанавливается на зажимной раме, но и размещается внутри корпуса зажимной рамы. Таким образом, можно разгрузить позиционирующую опору, не увеличивая наружный контур зажимной рамы.
С другой стороны, в предпочтительном варианте осуществления согласно пункту 8 формулы изобретения соответствующий двигатель поворотного привода может быть установлен за пределами корпуса зажимной рамы. Это является целесообразным, в частности, в таких случаях, когда требуется иметь хороший доступ к указанному двигателю для проведения технического обслуживания и других работ.
Как указано выше, зажимная рама обычно является очень тяжелой. Однако для того, чтобы поддерживать в определенных границах размеры двигателя, необходимого для осуществления ее поворота, может быть предусмотрен передаточный механизм, благодаря которому для поворота зажимной рамы можно использовать двигатель с меньшими размерами и, соответственно, с более высоким числом оборотов. Именно этот передаточный механизм, неизбежно занимающий много места, можно устанавливать внутри корпуса зажимной рамы, как это предусмотрено в предпочтительном варианте осуществления согласно пункту 9 формулы изобретения.
Зажимная рама обычно имеет прямоугольную форму, из чего следует, что боковые кромки этого прямоугольника рядом с местом, в котором фиксатор подпирает зажимную раму, являются особенно пригодными для размещения деталей поворотного привода, которые должны прикрепляться к зажимной раме. Для такой конструкции с боковым смещением поворотного привода и, в частности, двигателя согласно пункту 10 формулы изобретения, предусмотрен передаточный механизм, содержащий зубчатую передачу, который является особенно подходящим для такой конструкции с боковым смещением двигателя относительно фиксатора.
Краткое описание чертежей
Ниже приведено более подробное описание варианта осуществления изобретения, используемого только в качестве примера, со ссылками на прилагаемые чертежи, на которых представлены:
фиг. 1 - вид в перспективе предлагаемой станции для обработки конструктивных элементов воздушного судна,
фиг. 2 - вид сверху в увеличенном масштабе области соединения между правой позиционирующей опорой и зажимной рамой станции для обработки с фиг. 1,
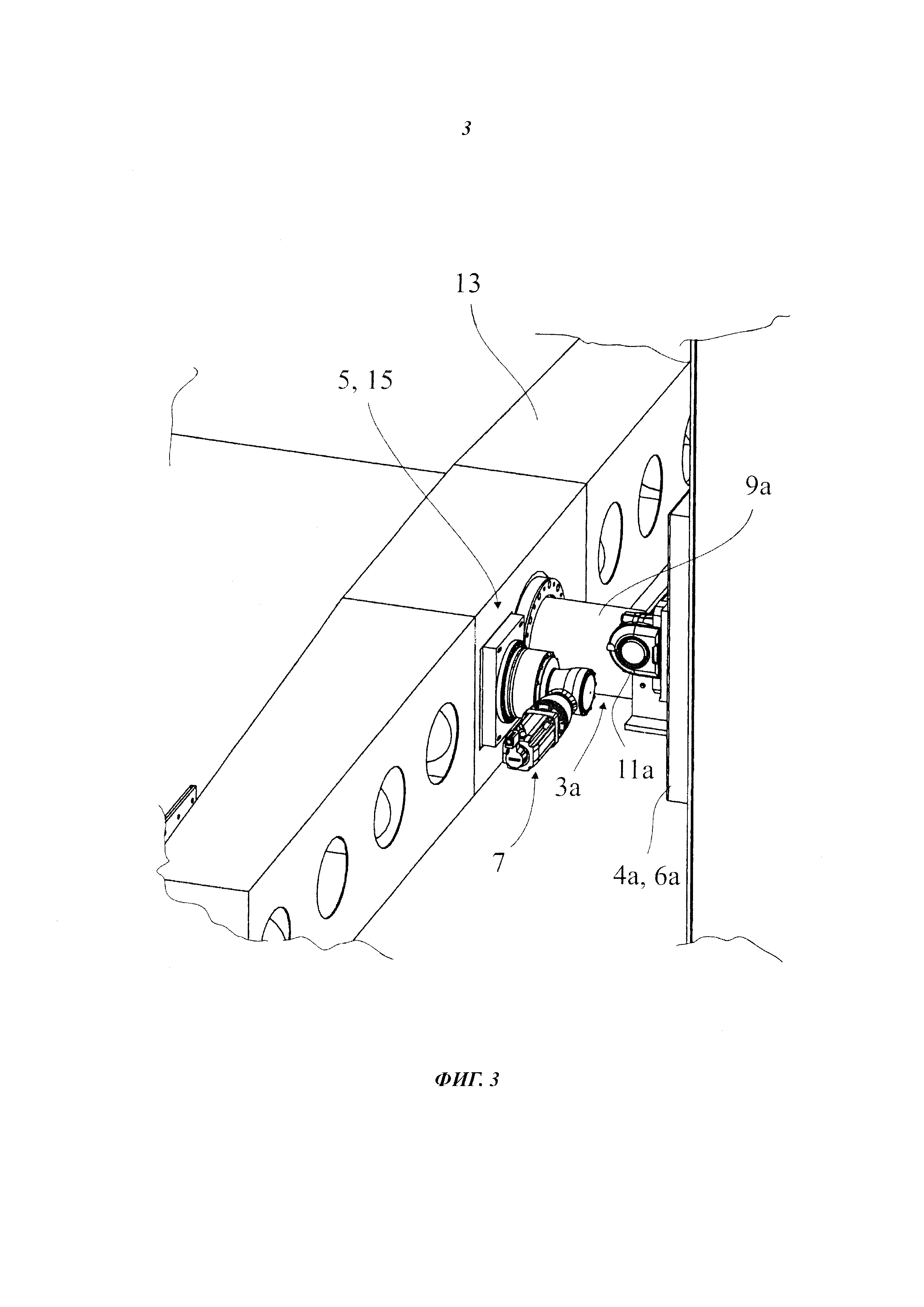
фиг. 3 - вид в перспективе области соединения с фиг. 2 и
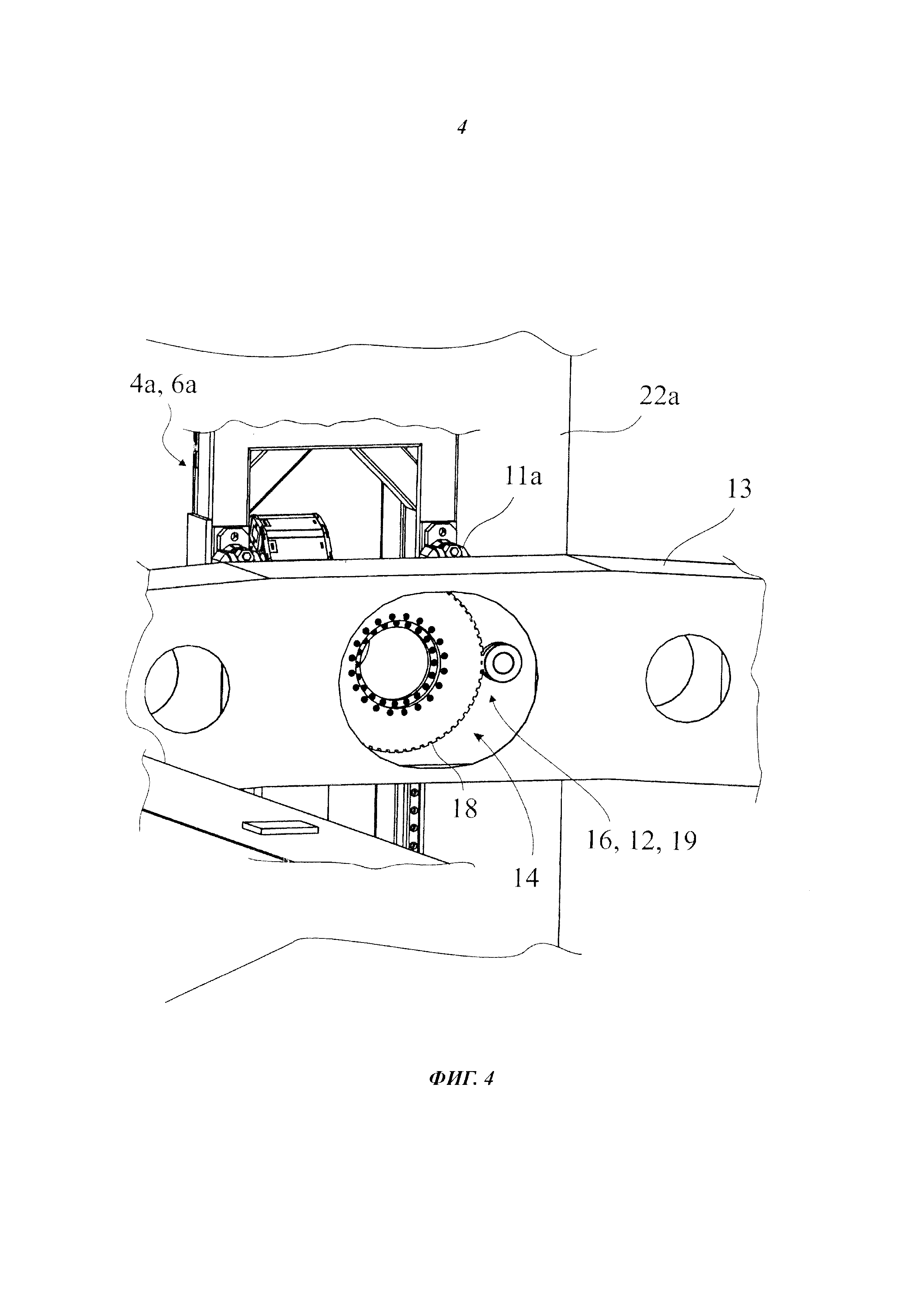
фиг. 4 - вид сбоку области соединения с фиг. 2 с внутренней части зажимной рамы.
Осуществление изобретения
Станция для обработки элементов воздушного судна согласно изобретению, показанная на фиг. 1-4, служит для установки крупногабаритных компонентов и конструкционных деталей летательного аппарата, в частности воздушного судна, например крыльев или деталей фюзеляжа, и позиционирования их таким образом, чтобы обеспечить возможность их обработки при помощи соответствующей металлообрабатывающей машины. Показанная станция для обработки должна позиционировать, а также поднимать, поворачивать и наклонять эти конструктивные элементы воздушного судна таким образом, чтобы обеспечивать гибкий доступ ко всем необходимым рабочим точкам, в которых требуется обработка при помощи соответствующей металлообрабатывающей машины. Однако, в принципе, показанная станция для обработки пригодна также для работы с деталями аналогичных размеров из других областей техники, например с конструкционными деталями в автомобилестроении или в любой области, где используются крупногабаритные конструкционные детали из волокнистых композитных материалов. Такие области включают, в частности, тяжелое и специальное машиностроение.
Станция для обработки согласно изобретению содержит зажимную раму 1, которая в данном случае является прямоугольной и на которую прямо или опосредованно может быть установлен конструктивный элемент воздушного судна и закреплен различными способами. Такая зажимная рама 1 называется также держателем деталей. Зажимная рама 1 образует геометрическую зажимную плоскость 2, соответствующую плоскости, на которой располагаются конструктивные элементы воздушного судна, установленные на зажимную раму 1. В данном случае зажимная плоскость 2 образована прямоугольной плоскостью зажимной рамы 1.
Станция для обработки согласно изобретению содержит также фиксатор 3а, который служит опорой для зажимной рамы 1, узел 4а перемещения, предназначенный для перемещения фиксатора 3a и поворотный привод 5.
Узел 4а перемещения, который в представленном примере содержит каретку 6а, подпирает зажимную раму 1 при помощи фиксатора 3a. Под узлом 4а перемещения следует также понимать детали станции для обработки, которые соединяются с фиксатором 3а, опираются на него и обеспечивают перемещение фиксатора 3а.
Соответственно, фиксатором 3а называются все детали, которые могут перемещаться узлом 4а перемещения и которые образуют опорное соединение между узлом 4а перемещения и зажимной рамой 1.
Согласно изобретению поворотный привод 5 содержит двигатель 7 для поворота зажимной рамы 1 относительно оси 8 рамы. Под осью 8 рамы следует понимать ось в геометрическом смысле. В примере, показанном на фиг. 1, эта ось 8 рамы образована прямой, которая соединяет друг с другом центры двух коротких сторон прямоугольника зажимной рамы 1. Эта ось 8 рамы называется также осью А, а поворотный привод 5, соответственно, приводом А. При этом ось 8 рамы, относительно которой совершается этот поворот, в принципе, может быть произвольно смещена относительно прямой, соединяющей оба центра, как указано выше.
Согласно изобретению ось 8 рамы является, по существу, параллельной приемной плоскости 2. Это видно, в частности, на фиг. 1. Требуемая параллельность в этом смысле включает то, что ось 8 рамы может проходить через зажимную плоскость 2 или может иметь также параллельное смещение относительно зажимной плоскости 2.
В принципе, узел 4а перемещения, фиксатор 3а, поворотный привод 5 и двигатель 7 могут состоять из нескольких компонентов, при этом их отдельные компоненты могут быть даже отдельно расположены в пространстве.
Станция для обработки согласно изобретению отличается тем, что двигатель 7 расположен на зажимной раме 1 и, в частности, прикреплен к ней. Прикрепление в этом смысле включает как прямое прикрепление к зажимной раме 1, так и косвенное прикрепление при помощи соединительного элемента - в любом случае отличного от фиксатора 3а - который, однако, в данном примере осуществления не предусмотрен. Поэтому ни у самого фиксатора 3а, ни у узла 4а перемещения не требуется предусматривать необходимое пространство для двигателя 7. Согласно изобретению двигатель 7 может представлять собой двигатель любого подходящего вида, в частности электрический двигатель.
Станция для обработки согласно изобретению может также содержать не показанную здесь С-образную станину с прикрепленной к ней заклепочной машиной, которая позволяет наносить заклепочные соединения на конструктивный элемент воздушного судна, установленный на зажимной раме 1 и позиционируемый при ее помощи.
Особенно предпочтительно, чтобы зажимная рама 1 была установлена с возможностью поворота относительно фиксатора 3а. Иными словами, при повороте зажимной рамы 1 относительно оси 8 рамы фиксатор 3а не должен принудительно поворачиваться вместе с зажимной рамой 1. Более того, зажимная рама 1 может перемещаться относительно фиксатора 3а.
Кроме того, предпочтительно, чтобы станция для обработки, как показано на фиг. 1, содержала дополнительный фиксатор 3b для опоры зажимной рамы 1 и дополнительный узел 4b перемещения для перемещения дополнительного фиксатора 3b. Дополнительный узел 4b перемещения в данном случае содержит дополнительную каретку 4b. Этот вариант осуществления с двумя узлами 4а, b перемещения предлагается, в частности, для особенно тяжелых конструктивных элементов воздушного судна. Дополнительный узел 4b перемещения и дополнительный фиксатор 3b могут быть, по существу, идентичными вышеуказанному узлу 4а перемещения и фиксатору 3а.
Особые преимущества обеспечиваются, если узел 4а перемещения и дополнительный узел 4b перемещения расположены на противоположных сторонах зажимной рамы 1. В случае станции для обработки, показанной на фиг. 1, с прямоугольной приемной рамой 1 предпочтительно, чтобы узлы 4a, b перемещения были расположены на противоположных коротких сторонах прямоугольной зажимной рамы 1.
Предпочтительно также, чтобы, как показано, в частности, на фиг. 2 и 3, фиксатор 3а имел опорную ось 9а, относительно которой можно поворачивать зажимную раму 1. Эта опорная ось 9а может иметь, в частности, трубчатую форму, что также показано на фиг. 2 и 3.
В том случае, если предусмотрен дополнительный узел 4b перемещения, предпочтительно, чтобы дополнительный фиксатор 3b этого дополнительного узла 4b перемещения также имел дополнительную опорную ось 9b, относительно которой можно поворачивать зажимную раму 1. Эта дополнительная опорная ось 9b показана на фиг. 1.
При этом предпочтительно, чтобы опорная ось 9а и дополнительная опорная ось 9b были расположены коллинеарно друг другу, и чтобы, таким образом поворот зажимной рамы 1 относительно оси 8 рамы переносился совместно обеими опорными осями 9а, b.
Для того чтобы наряду с поворотом приемной рамы 1 относительно оси 8 обеспечить также опрокидывающее движение приемной рамы 1 относительно оси 10 опрокидывания, перпендикулярной оси 8 рамы и расположенной также параллельно зажимной плоскости 2, особенно предпочтительно предусмотреть соединение при помощи шарнира 11а между опорной осью 9а и узлом 4а перемещения, в результате чего опорная ось 9а может поворачиваться относительно перпендикулярной ей поворотной оси 12. Указанная ось 10 опрокидывания называется также осью В.
Такое опрокидывающее движение можно осуществить благодаря тому, что в случае двух узлов 4а, b перемещения обе опорные оси 9а, b находятся на разной высоте по вертикали, что более подробно описывается ниже. При помощи шарнира 11а опорная ось 9а, а также дополнительная опорная ось 9b могут обеспечивать опрокидывающее движение зажимной рамы 1. Также предпочтительно, чтобы дополнительная опорная ось 9b соединялась с дополнительным узлом 4b перемещения при помощи дополнительного шарнира 11b.
При таком опрокидывающем движении уменьшается расстояние по горизонтали, образованное зажимной рамой 1, а именно горизонтальная проекция оси 8 рамы. Это можно компенсировать, например, при помощи приближения узлов 4а, b перемещения с их соответствующими фиксаторами 3а, b друг к другу или при помощи выдвижения одной или обеих опорных осей 9а, b.
Шарнир 11а и/или дополнительный шарнир 11b, как показано на фиг. 2 и 3, где более подробно представлен шарнир 11а, может представлять собой простой шарнир. На фиг. 2 и 3 показано также, что поворотная ось 12 может проходить горизонтально.
Кроме того, предусмотрено, например, чтобы указанная поворотная ось 12 не пересекала ось 8 рамы, а была смещена относительно этой оси 8 рамы. В соответствии с этим шарнир 11а также является смещенным - согласно фиг. 3 смещенным по вертикали - к опорной оси 9а. Таким образом, обеспечивается возможность уменьшения длины опорной оси 9а, в результате чего на узел 4а перемещения действует небольшой вращающий момент, создаваемый весом зажимной рамы 1.
Кроме того, на зажимной раме 1 около дополнительного фиксатора 3b и дополнительного узла 4b перемещения может быть также предусмотрен дополнительный двигатель. Соответственно, описанные ниже варианты осуществления поворотного привода 5 и двигателя 7 могут быть также реализованы с использованием дополнительного двигателя и относящихся к нему компонентов.
Еще один предпочтительный вариант осуществления станции для обработки согласно изобретению предусматривает, что зажимная рама 1 содержит корпус 13 рамы, который образует внутреннюю полость 14. При этом корпус 13 рамы не обязательно должен полностью окружать внутреннюю полость 14.
Как видно на фиг. 1, указанный корпус 13 рамы образует, по существу, прямоугольную основную форму зажимной рамы 1. При этом предусмотрено также, чтобы редуктор 15 поворотного привода 5 был по меньшей мере частично расположен во внутренней полости 14, которая показана на фиг. 4. Таким образом, осуществляется рациональное использование монтажного пространства, образуемого корпусом 13 рамы, которое в устройствах известного уровня техники не используется для поворотного привода 5 или аналогичного компонента. При этом редуктор 15 может быть также полностью расположен во внутренней полости 14.
На фиг. 1 и еще более наглядно на фиг. 2 и 3 показано, что согласно одному предпочтительному варианту осуществления двигатель 7 расположен за пределами внутренней полости 14 и, следовательно, также за пределами корпуса 13 зажимной рамы. Расположение двигателя 7 за пределами корпуса 13 зажимной рамы обеспечивает простоту доступа к двигателю 7 с целью его технического обслуживания или даже замены в случае установки на зажимную раму 1 обрабатываемого конструктивного элемента воздушного судна с существенно отличающимися размерами, что приводит к изменению требований к подводимой мощности.
Альтернативно этому может быть предусмотрено размещение двигателя 7 внутри корпуса 13 зажимной рамы. В этом случае внутренняя полость 14 также рационально используется, и, благодаря расположению двигателя 7 во внутренней полости 14, наружный контур зажимной рамы 1 не изменяется.
Как указано выше, зажимная рама 1 и устанавливаемый на нее конструктивный элемент воздушного судна обычно имеют очень большие размеры и, соответственно, большой вес. Для того чтобы обеспечить более компактные размеры двигателя 7 поворотного привода 5, предназначенного для поворота зажимной рамы 1 относительно оси 8 рамы, соответствующей оси А, предпочтительно, чтобы привод 5 содержал передаточный механизм 16.
Этот передаточный механизм 16 предпочтительно устанавливается во внутренней полости 14. Однако альтернативно этому он может быть расположен за пределами внутренней полости 14, например, на наружной стороне корпуса 13 зажимной рамы. Именно такой передаточный механизм 16, который благодаря своему коэффициенту передачи позволяет использовать двигатель 7 с меньшими размерами, обычно занимает большее пространство, поэтому его расположение внутри корпуса 13 зажимной рамы, а также во внутренней полости 14 является особенно предпочтительным.
В предпочтительном варианте осуществления этот передаточный механизм 16 содержит зубчатую передачу 17, при этом зубчатое колесо 18 зубчатой передачи 17 соединено без возможности вращения с фиксатором 3a и в данном случае, в частности, с опорной осью 9а. Такая предпочтительная конструкция обеспечивает особенно простую технологию изготовления передаточного механизма 16.
Этот вариант осуществления дополнительно усовершенствован за счет того, что зубчатая передача 17 представляет собой цилиндрическую зубчатую передачу 19.
Кроме того, особенно предпочтительно, чтобы узел 4а перемещения обеспечивал линейное перемещение фиксатора 3a в направлении 20 сдвига. Для этой цели в примере осуществления, показанном на фиг. 1-3, узел 4а перемещения содержит вертикальную направляющую 21, которая позволяет каретке 6а и, следовательно, фиксатору 3a линейно перемещаться в указанном направлении 20 сдвига.
При этом уже описанное опрокидывающее движение зажимной рамы 1 относительно оси 10 опрокидывания обеспечивается тем, что узел 4а перемещения и дополнительный узел 4b перемещения позволяют выполнять независимое перемещение фиксатора 3a и дополнительного фиксатора 3b. В результате этого зажимная рама 1 может поворачиваться относительно оси 10 опрокидывания, перпендикулярной как оси 8 рамы, так и направлению 20 сдвига.
Позицию опрокидывания зажимной рамы 1 относительно этой оси 10 опрокидывания можно просто получить, поскольку при помощи узлов 4а, b перемещения фиксаторы 3a, b можно установить в различных позициях в направлении 20 сдвига, а в случае примера осуществления, показанного на фиг. 1-4, также на различную высоту по вертикали относительно друг друга.
Как показано в примере осуществления, представленном на фиг. 1-4, узел 4а перемещения может содержать позиционирующую опору 22а, на стороне 23а которой расположен фиксатор 3a. Дополнительный узел 4b перемещения может, соответственно, содержать дополнительную позиционирующую опору 22b, на стороне 23b которой расположен дополнительный фиксатор 3b.
Кроме уже описанной возможности перемещения фиксаторов 3a, b при помощи узлов перемещения 4а, b, которые обеспечивают как установку по высоте, так и опрокидывающее движение зажимной рамы 1, узел 4а перемещения - как показано на фиг. 1 - может также содержать ходовое устройство 24a для линейного перемещения позиционирующей опоры 22а в направлении 25 хода. В частности, это ходовое устройство 24а может содержать направляющую Y 26а, по которой может происходить перемещение позиционирующей опоры 22а в направлении 25 хода, обозначаемом также как направление Y. При этом направление 25 хода предпочтительно является перпендикулярным направлению 20 сдвига. Такое перпендикулярное расположение в примере осуществления, показанном на фиг. 1, получается в результате того, что направление 25 хода является горизонтальным, а направление 20 сдвига - вертикальным.
При наличии дополнительной позиционирующей опоры 22b дополнительный узел 4b перемещения может содержать дополнительное ходовое устройство 24b для линейного перемещения дополнительной позиционирующей опоры 22b в направлении 25 хода.
Это также позволяет увеличить гибкость при установке и позиционировании зажимной рамы 1 на станции для обработки, в частности, относительно С-образной станины, которая может использоваться с заклепочной машиной.
Линейное перемещение позиционирующей опоры 22а и дополнительной позиционирующей опоры 22b также являются параллельными.
Реферат
Изобретение относится к области обработки крупногабаритных конструктивных деталей, в частности к устройствам для установки и позиционирования таких деталей, например в виде конструктивных элементов воздушного судна. Устройство содержит зажимную раму (1), которая определяет зажимную плоскость (2), фиксатор (3а) для опоры зажимной рамы (1), узел (4а) перемещения для перемещения фиксатора (3а) и поворотный привод (5), который содержит двигатель (7) для поворота зажимной рамы (1) относительно оси (8) рамы, расположенной параллельно зажимной плоскости (2). При этом двигатель (7) установлен на зажимной раме (1), в частности, прикреплен к ней. Использование изобретения позволяет получить более простую и компактную конструкцию устройства с сохранением возможностей гибкого позиционирования конструктивной детали при ее обработке. 15 з.п. ф-лы, 4 ил.
Комментарии