Устройство фиксации подвижного исполнительного органа - SU901013A1
Код документа: SU901013A1
Чертежи
Описание
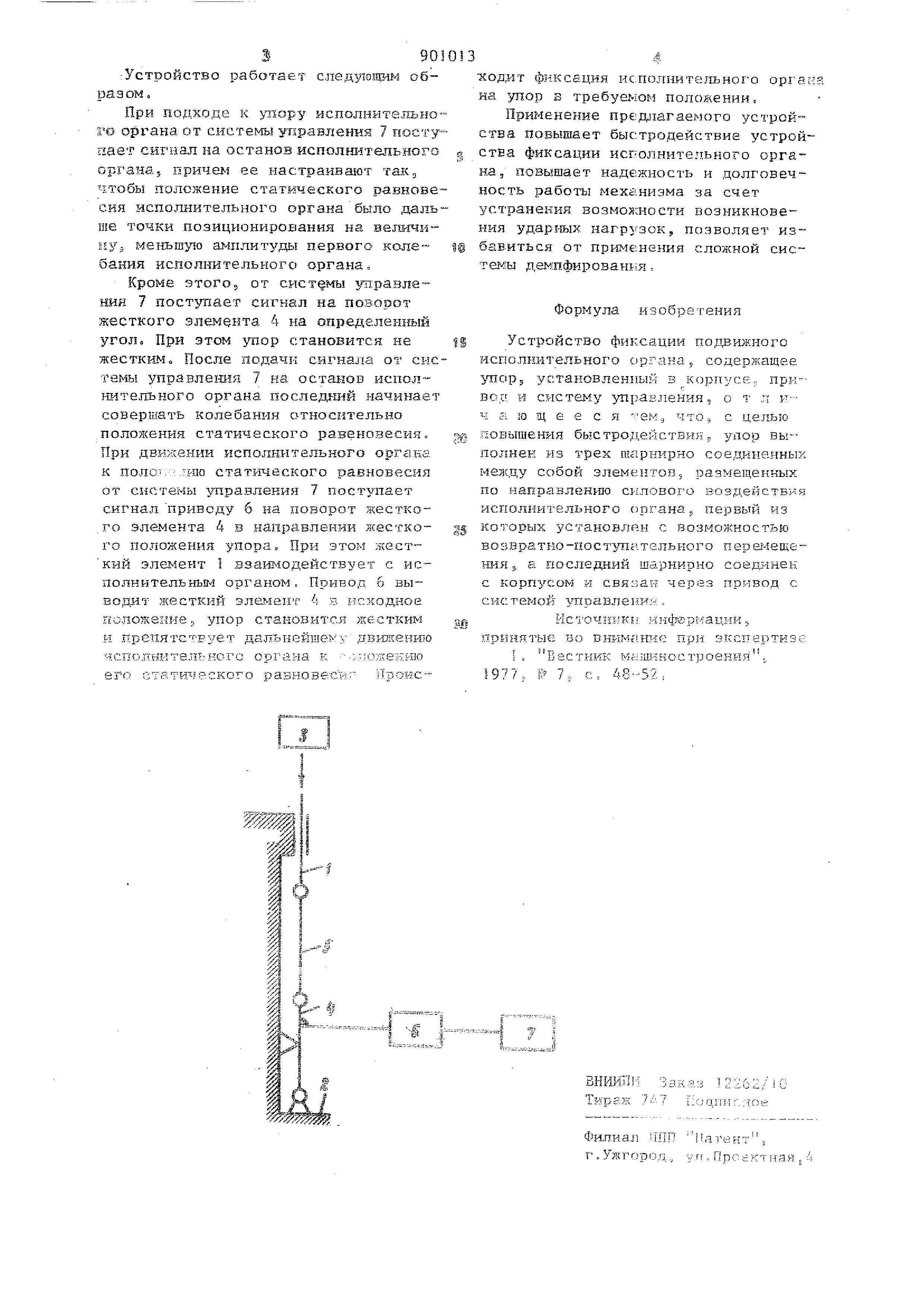
Изобретение относится к машиностроению , роботостроению и станкостроению . Оно может быть использова но при фиксации в требуемом положении относительно упругих подвижных исполнительных органов промышленных роботов, манипуляторов, автооперато ров, станков с цикловой системой управления. Известно устройство фиксации меха низма автоматической смены инструмен та, установленного в корпусе, и состоящее из приводного механизма, системы управления и гидравлическог демпфера l. Известное устройство требует боль шого времени на фиксирование, которое в общем времени цикла составляет до 50%. Эти условия накладываются ограничениями по безударной работе механизма , Цель изобретения - повышение быст родействия механизма фиксации. Указанная цель достигается тем, что упор выполнен из трех шарнирно соединенных между собой жестких элементов , размещенных по направлению силового воздействия исполнительного органа, первый и которых установлен с возможностью возвратно-поступательного перемещения, а последний шарнирно соединен с корпусом и связан через привод с системой управления. На чертеже показана кинематическая схема устройства. Первый жесткий элемент 1 установлен в корпусе 2 упора с возможностью возвратно-поступательного движения по направлению силового воздействия исполнительиого органа 3. Третий жесткий элемент 4 одним концом шарнирно соединен со вторьм жестким элементом 5, а другим концом - с корпусом 2 с возможностью поворота в одну сторону от исходного положения и связан через привод 6 с системой управления 7.
:Устройство работает следутанщм образом .
При подходе к упору исполнительного органа от системы управления 7 поступает сигнал на останов исполнительного органа, пpичe i ее настраивают так., чтобы положение статического равно1зесия исполнительного органа было дальше точки позиционирования на величиКУ; . меньшую амплитудь первого колебания исполнительного органа-.
Кроме этого, от системы таравлеНИН 7 поступает сигнал на поворот жесткого элемента 4 на определенный угол При этом упор становится не жестким о После подачк сигнала от систекь управлешя 7 на останов исполнительного органа последний начинает совершать колебания относительно положения статического равенозесия. При движении исполнительного органа. к полог- :шо статического равновесия от CHCTei-ibi управления 7 поступает сигнал приводу 6 на поворот жесткого элемента 4 в направлении жесткого положения упора. При этом жесткий эле1.ент 1 взакмодействует с исполнитель нья органом. Привод 6 выводит н-есткий элег.5ент 4 Б рзскодное положение 5 упор становится жестким и препятсТвует дальнейшей;,- двз-шеншо чсполнктельного органа к -:.южекшо его статиг еского равнове-таг ПроисTiofSMT фиксация ис.полнительного органа на упор в требуемом положении.
Применение предлагаеьюго устройства повышает быстродействие устройстЕа фиксации исполнительного органа , повышает надежность и долговечность работы механизма за счет устранения возмоя;ности возникновения ударных нагрузок, позволяет избавиться от применения сложной систамы де шфмрован11Я,
Формула изобретения
Устройство фиксации подвижного исполнительного органа . содерлсащее ,Iop5 установленный з корпусе, привод и систему управления, о т л и-ч :: JO 5Ц е е с я SM., что, с целью
повышения быстродействия; упор вы-полней из трех питрнирно соединенных между собой элементов; размещенных по направлению силового воздействия исполнительного органа„ первый из
которых установлен с возможностью возвратко-поступ 1 тельного перемещения , а последний шарнирно соединен с корпусом и связан через привод с системой т(равле :и;-.,
Ис1Очники иифэр --ации J
принятые во BHHMfiHHp при экспертизе
. Вастник ма ш костроения 1977, К 7, с, 4е--52 .

Реферат
Формула
Комментарии