Способ позиционирования точки в плоскости - SU1022802A1
Код документа: SU1022802A1
Чертежи

Описание
Изобретение относится к проблеме позиционирования точки, например при Ио -отовлении или измерении нескольких отверстий в обрабатываемой детали, и может быть использовано в любых областях науки и техники и, в частности, в машиностроении, в приборостроении, в печатании и т. д.
Известен способ позиционирования деталей в плоскости путем воздействия на них вращающегося кольца и перемещения их по сложной траектории 1.
Недостатком известного способа является то, что детали перемещаются хаотично и точкой позиционирования является только центр плоскости, ограниченной размерами кольца.
Целью изобретения является повышение быстродействия за счет придания точкестрого заданной траектории.
Поставленная цель достигается тем, что ортогонально заданные координаты точки преобразовывают в полярные относительно двух соответствующих центров, а позиционирование осуществляют вращением точки вокруг упомянутых центров на величину соответственных углов полярных координат.
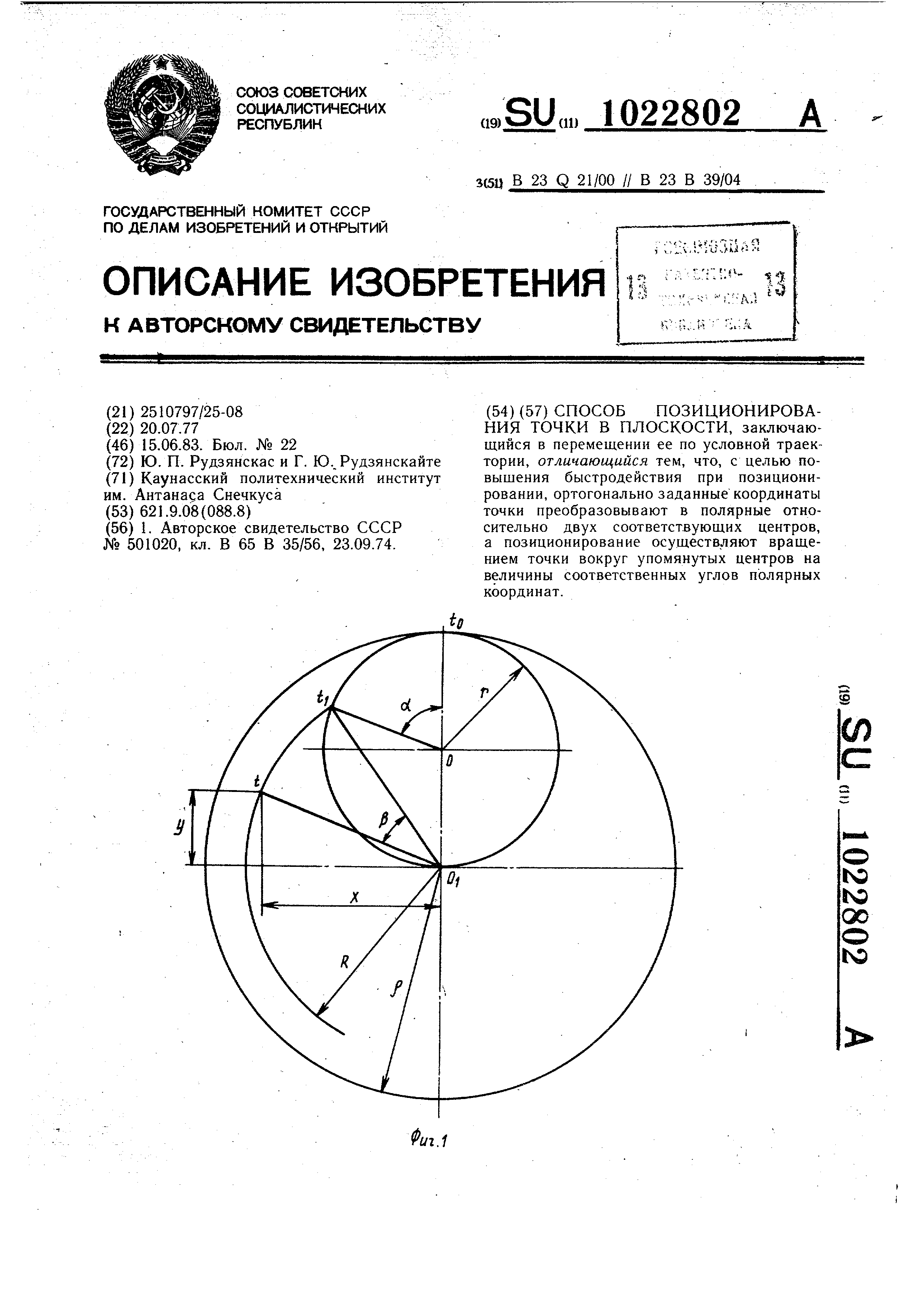
На фиг. 1 изображена траектория движения устанавливаемой точки во время позиционирования; на фиг. 2 - кинематическая схема механизма позиционирования; на фиг. 3 - разрез А-А на фиг. 2.
Суть способа заключается в том, что искомая точка t задана координатамиХи Y и может быть найдена с помощью устанавливаемой точки to, если эту точку, находящуюся на радиусе г, повернуть около оси О углом с( до точки ti, а точку tj, находящуюся на радиусе R, повернуть углом f, около оси О) до искомой точки t. Причем повороты на углы ы и можно осуществлять и одновременно . Поскольку в зависимости от угла сХ радиус R может меняться в пределах от нуля до величины у, то путем изменения величин углов сз и / точку t с начального фиксированного положения можно установить в любую точку площади круга радиуса /. Наибольшая площадь обслуживания достигается при S 2r. Количественные величины углов о( и точки преобразуются в задающем устройстве - в логической схеме или в системе программного управления в зависимости от заданных ортогональных координат по формулам
arc ft arc cos - arc tg
Y
2r
Вращения устанавливаемой точки t около двух осей О и Oj и таким образом
установление ее в любую искомую точку площади круга радиуса / можно осуществить , например, с помощью планетарного механизма с одним водилом и одним сателлитом (фиг. 2 и 3). Кривощип 1 эксцентрично укреплен на подвижной оси 2 на радиусе г Ось 2 смонтирована в подшипниках на водиле 3. Водило 3 неподвижно укреплено на оси 4, а последняя через подшипники укреплена в неподвижном корпусе 5.
0 Оси 2 и 4 снабжены индивидуальными приводами 6, преобразователями 7 для определения углового поворота осей и магнитными муфтами торможения 8. Если во время позиционирования необходимо установить несколько жестко связанных отдельных то чек по разным координатам, например вести обработку или измерения какой-либо детали, то деталь крепится на столе 9, который подвижно через подшипники связан с кривошипом 1 и может перемещаться с ним. ПаQ раллельное положение стола 9 во время его перемещения с кривощипом 1 обеспечивает пантограф 10 (на фиг. 2 пунктиром показано следующее положение стола).
Во время позиционирования необходимо
5 Б логической схеме либо в системе программного управления устройства задать ортогональные координаты X и у искомой точки и включить устройство, в системе программного управления или в логической схеме введенная информация в виде ортогональных координат х и у счетным механизмом преобразовывается в две соответствующие величины углового поворота осей 2 и 4. При включении устройства, после в-ыбора нужных координат, приводы 6 вращают оси 2 и 4, в результате чего кривошип 1
перемещается в сторону искомой точки. Текущее положение вращаемых осей 2 и 4 отражают круговые преобразователи 7, которые в устройстве выполняют функции обратной связи. После отработки заданных угловых поворотов осей 2 и 4 по данным круговых преобразователей, включаются электромагнитные муфты торможения 8 и останавливают вращение осей 2 и 4 в нужном положении. Одновременно подается сигнал для выключения приводов. Чтобы
5 при мгновенном останове не перегружалась цепь привода от инерции, в цепи предусмотрено гибкое звено. Поскольку частота вращения осей 2 и 4 не превышает 0,8 рад/с, . то силы инерции у них незначительны и электромагнитные муфты торможения способны осуществить останов мгновенно.
Реферат
СПОСОБ ПОЗИЦИОНИРОВАНИЯ ТОЧКИ В ПЛОСКОСТИ, заключающийся в перемещении ее по условной траектории , отличающийся тем, что, с целью повышения быстродействия при позиционировании , ортогонально заданные координаты точки преобразовывают в полярные относительно двух соответствующих центров, а позиционирование осуществляют вращением точки вокруг упомянутых центров на величины соответственных углов полярных координат. (Л Ю to оо о КЗ
Комментарии