Устройство для позиционирования длинномерных деталей - SU1400842A1
Код документа: SU1400842A1
Чертежи

Описание
А-Л

Реферат
Изобретение относится к области станкостроения, в частности к устройствам для позиционирования длинномерных деталей. Цель изобретения - повьпиение точности позиционирования за счет сокращения хода кареток. На направляющих 2 и 3 установлена первая каретка 1 с реечным приводом перемещения, шестерня 11 которого закреплена на двигателе, а рейка 12- между направляющими 2 и 3. На каретке 1 смонтирована вторая каретка с возможностью перемещения от свя

Формула
(Л
tftJ
зьгаающего их гайковинтового привода
и размещен ципиндрический фиксатор 13, предназначенный для взаимодействия с упорами 15, закрепленными меж
ду рейкой 12 и направляющей 2. Последнюю с обеих сторон схватывают ролики 4-7, эксцентрично установленные
на поворотных валах, связанных с приводами, установленными на каретке , при перемещении которой фиксатор
13 взаимодействует с упором
Изобретение относится к станкостроению
, в частности к устройствам для позиционирования длинномерных деталей типового сортамента,та-
ких как швеллеры, двутавры.
Цель изобретения - повьшение точности
позиционирования за счет сокращения хода кареток.
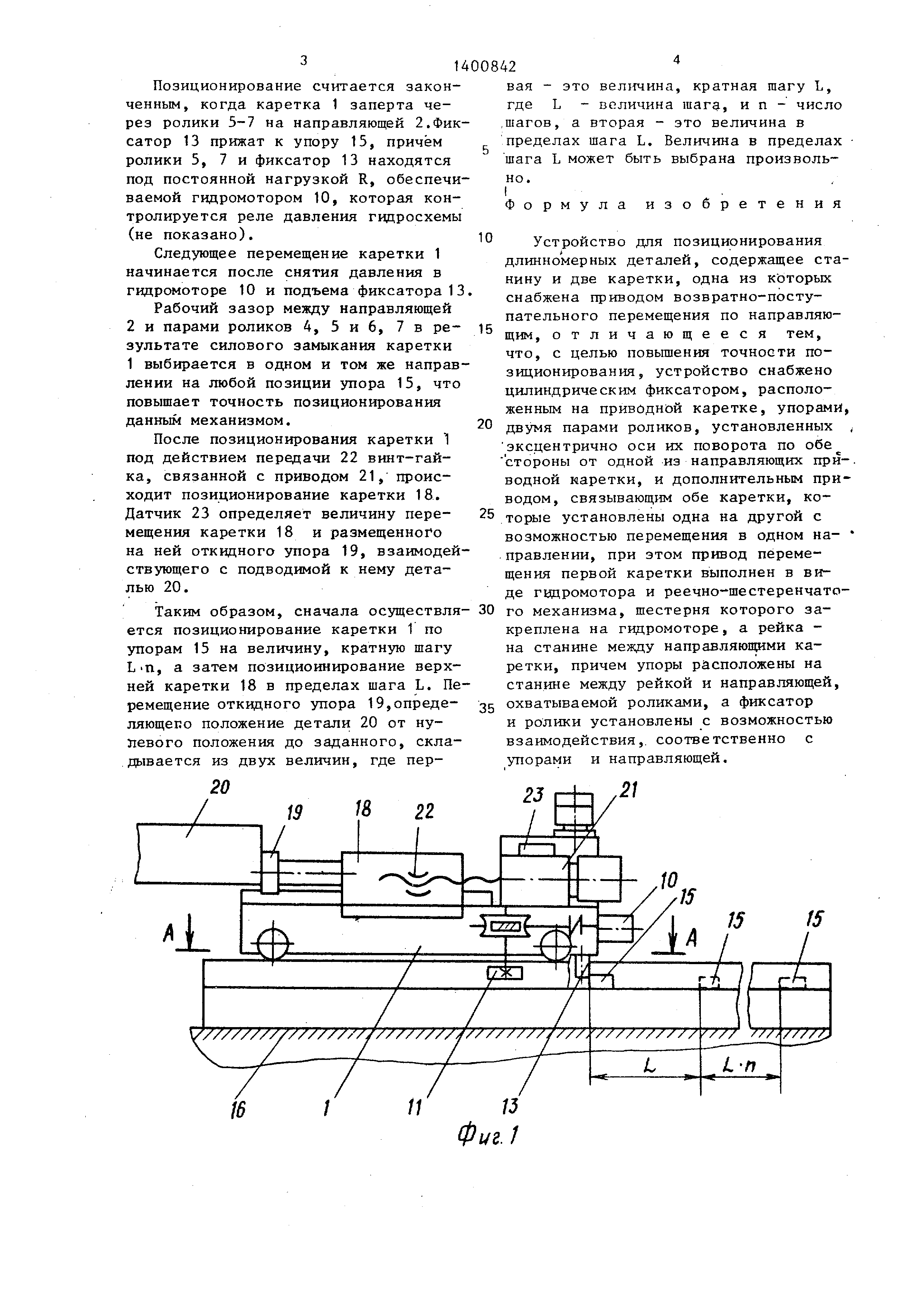
На фиг.1 представлено предлага- емое устройство, общий вид;нафиг.2- то же, вид сбоку; на фиг.З - сечение
А-А на фиг.1 (схема распределения си и зазоров при позиционировании механизма
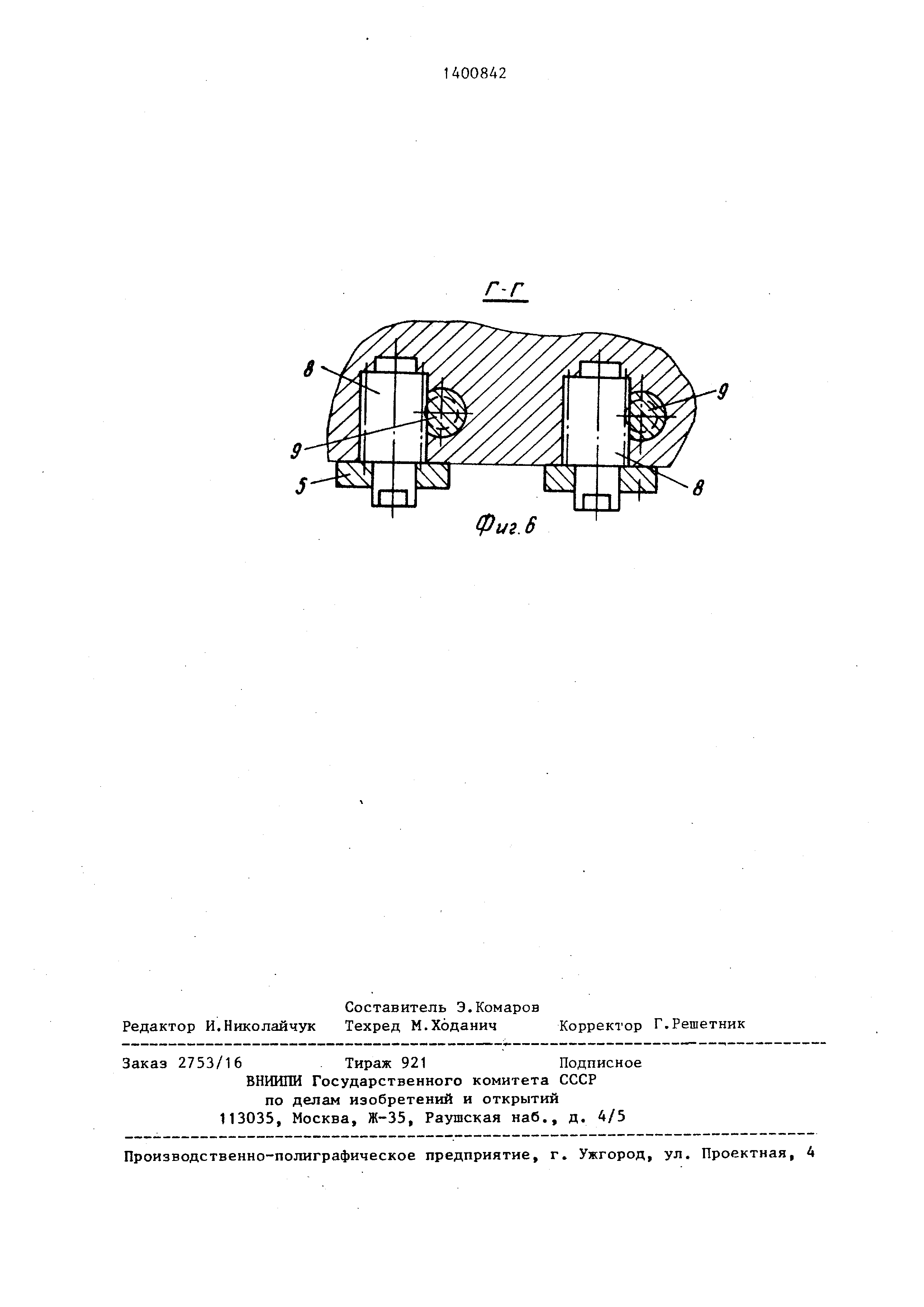
); на фиг.4 - сечение Б-Б на фиг.2; на фиг.5 - сечение В-В на фиг на фиг.6 - сечение Г-Г на фиг.5.
Устройство для позиционирования сдержит нижнюю (первую) подвижную ка-
ретку 1, установленную на направляющие 2 и 3.
Каретка 1 ориентирована относи-
.тельно направляющей 2 двумя парами эксцентричных роликов 4, 5 и 6, 7,
каждый из которых снабжен регулировочным червячным винтом 8 с приводно шестерней 9.
Каретка 1 приводится в движение двигателем-гидромотором 10, который
связан с шестерней 11, взаимодействующей с рейкой 12, размещенной между направляющими 2 и 3.
Каретка 1 снабжена цилиндрическим выдвижным фиксатором 13 и приводом
его перемещения, выполненным в виде гидроцилиндра 14. Фиксатор 13 периодически
взаимодействует с плоскими мерными упорами 15, расположенными на станине 16 между рейкой 12 и на
правляющей 2 с шагом L 500 мм. По15 и шестерня 11, взаимодействуя
с рейкой 12, заставляет каретку 1 развернуться вокруг оси фиксатора 13, который одновременно скользит
по поверхности упора 15. После этого каретка 1 запирается роликами 5, 6 и 7 на направляющей 2. Таким
образом осуществляется силовое замыкание каретки и после этого по
ней перемещается на необходимое расстояние вторая каретка. 6 ил.
j
0 s
п
5
0.
зиционирование каретки 1 контролируется конечным выключателем 17.
На .каретке 1 размещена с возможностью относительного перемещения
по ней вторая подвижная каретка 18 с откидным упором 19, который является
одновременно демпфером для смягчения удара при подходе обрабатываемой детали 20.
Перемещение каретки 18 осуществляет привод 21 через передачу 22 винт-
гайка, на ходовом винте установлен датчик 23, определяющий величину перемещения
каретки 18 и положение откидного упора 19, определяющего положение обрабатываемой детали 20.
Устройство работает следующим образом .
Каретка 1 шестерней 11 от гидромотора 10 перемещается по рейке 12
(вправо по чертежу) на величину, кратную шагу L 500 мм. При подходе каретки
1 к заданному упору 15 конечный выключатель 17 дает команду на опускание
гидроцилиндра 14 фиксатора 13.
При последующем движении каретки
1 фиксатор 13 прижимается к упору 15, расположенному на станине 16.
Происходит позиционирование каретки 1.
Положение приводной шестерни 11
выбрано таким, что реакция силы, R от взаимодействия шестерни 11 и рейки
12 заставляет каретку 1 развернуться вокруг оси фиксатора 13. Кроме того, цилиндрический фиксатор 13
скользит по плоскости упора 15, которая перпендикулярна направляющей 2.
/
20
15
б
у///// ///у//у/л
/ И ,
Фиг. 2
rj
5,5
////
Ф .5
/«4 ,7
8
фиг. 6
Комментарии