Система автоматической ориентации подвижных узлов - SU1212758A1
Код документа: SU1212758A1
Чертежи

Описание
I
Изобретение относится к машиностроению , а именно, к станкам, на подвижные узлы которых -действуют различные по величине и направлению моменты, под действием которых нарушается заданная ориентация подвижного узла.
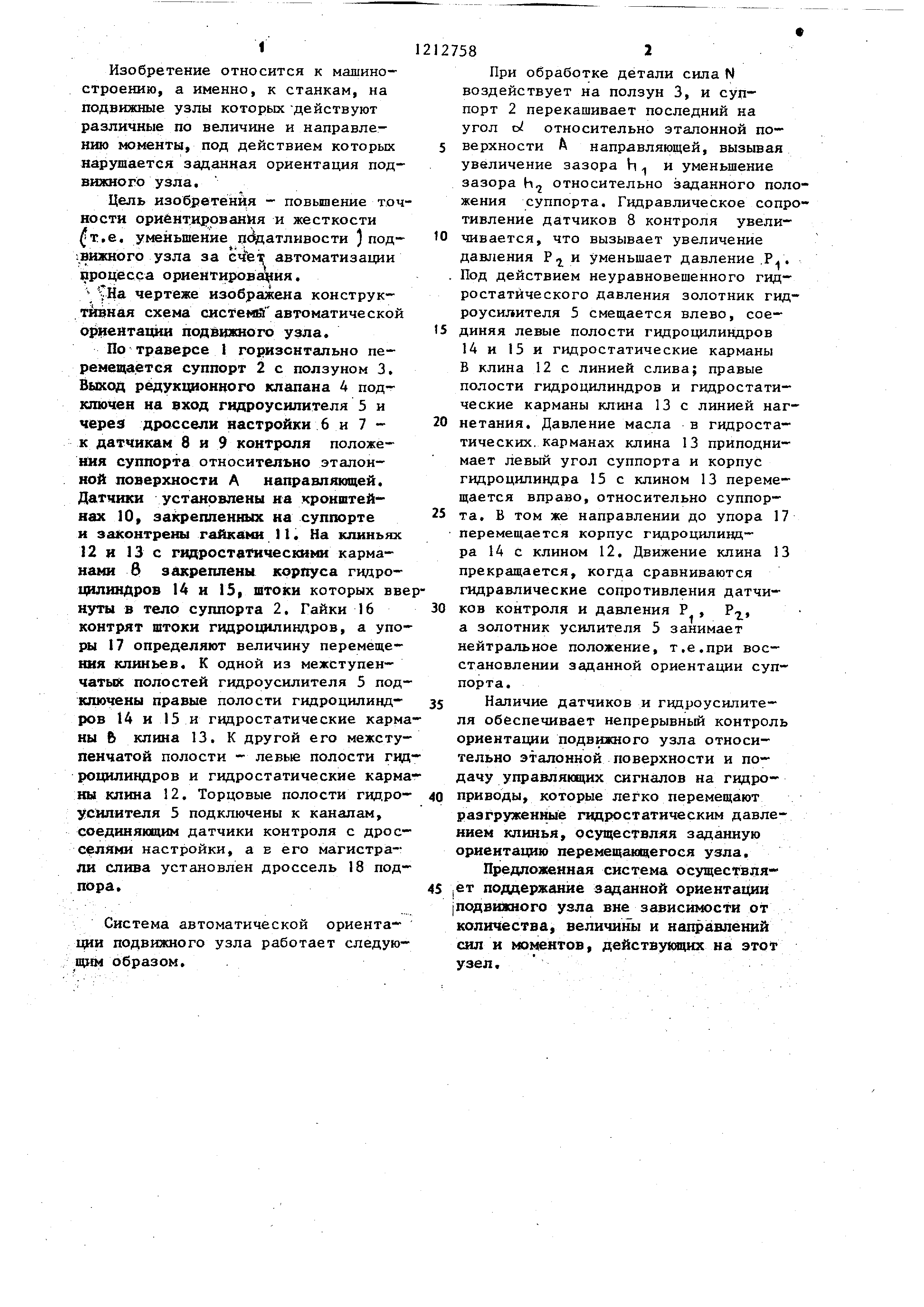
Цель изобретения - повышение точности ориёнт.и эрванйя и жесткости (;т.е, уменьшение податливости ) под- -вижного узла за автоматизации процесса ориентирования. - {На чертеже изображена конструктивная схема системй автоматической О1: 11ентации подвижного узла.
По траверсе I горизонтально перемещается суппорт 2 с ползуном 3. Выход редукционного клапана А подключен на вход гидроусилителя 5 и через дроссели настройки 6 и 7 - к датчикам 8 и 9 контроля положения суппорта относительно этапон- яой поверхности А направляющей. Датчики устаирвлены на кронштейнах 10, закреппенных на суппорте и законтрены гайками И. На клиньях 12 и 13с гидросташческини карманами 8 закреплены корпуса гидроцилиндров 14 н 15, штоки которых ввенуты в тело суппорта 2. Гайки 16 контрят штоки гидроцилиндров, а упоры 17 определяют величину перемещения клиньев. К одной из межступенчатых полостей гидроусилителя 5 подключены правые полости гидроцилиндров 14 и 15 и гидростатические карманы & клина 13. К другой его межступенчатой полости - левые полости гвд роцилиндров и гидростатические карманы клина 12. Торцовые полости гидроусилителя 5 подключены к каналам, соединяющим датчики контроля с дросселями настройки, а в его магистрали слива установлен дроссель 18 подпора .
Система автоматической ориентации подвижного узла работает следующим образом.
582
При обработке детали сила N воздействует на ползун 3, и суппорт 2 перекашивает последний на угол о относительно эталонной поверхности А направляющей, вызывая увеличение зазора h и уменьшение зазора h относительно заданного положения суппорта. Гидравлическое сопротивление датчиков 8 контроля увели-
чивается, что вызывает увеличение
давления Р и уменьшает давление./. Под действием неуравновешенного гидростатического давления золотник гидроусилителя 5 смещается влево, сое-
диняя левые полости гидроцилиндров 14 и 15 и гидростатические карманы В клина 12 с линией слива; правые полости гидроцилиндров и гидростатические карманы клина 13 с линией нагнетания . Давление масла в гидростатических , карманах клина 13 приподнимает левый угол суппорта и корпус гидроцилиндра 15 с клином 13 перемещается вправо, относительно суппор-
та. В том же направлении до упора 17 перемещается корпус гидроцилини- ра 14 с клином 12. Движение клина 13 прекращается, когда сравниваются гидравлические сопротивления датчиков контроля и давления Р
г
а золотник усилителя 5 занимает нейтральное положение, т.е.при восстановлении заданной ориентации суппорта .
Наличие датчиков и гидроусилителя обеспечивает непрерывный контроль ориентации подвижного узла относительно эталонной поверхности и подачу управляющих сигналов на гидроприводы , которые легко перемещают разгруженные гидростатическим давлением клинья, осуществляя заданную ориентацию перемещающегося узла. Предлоясенная система осуществлявт поддержание заданной ориентации подвижного узла вне зависимости от количества, величины и направлений сил и моментов, действукщих на этот узел.
/7
Реферат

Комментарии