Портативный электроинструмент, снабженный устройством для определения относительного положения между двумя органами инструмента, по меньшей мере один из которых выполнен подвижным - RU2470263C2
Код документа: RU2470263C2
Чертежи
Описание
Настоящее изобретение касается портативного электроинструмента, снабженного устройством, позволяющим точно, непрерывно и бесконтактно определять относительное положение между двумя взаимодействующими элементами двух совместно действующих органов упомянутого инструмента, один из которых перемещается в линейном или угловом направлении. Оно применимо к портативным электроинструментам и в особенности, но не исключительно, к электронным секаторам или подобным инструментам, содержащим режущие кромки с контролируемым закрыванием.
В устройствах, позволяющих перемещать в линейном или угловом направлении подвижный орган в соответствии с командой, задаваемым пользователем, наиболее часто используются два взаимодействующих элемента, таких как применительно к портативным электроинструментам:
- управляющее устройство, которое выдает команду и может представлять собой пусковой механизм;
- приводной механизм, который выполняет работу и который может быть соединен с двигателем системой передачи.
Связь между управляющим устройством и приводным механизмом обеспечивается с помощью электроники посредством платы управления, содержащей микропроцессор и которая, кроме того, должна измерять линейное или угловое перемещение приводного механизма, чтобы контролировать порядок выполнения команды.
В настоящее время существует разнообразие устройств, позволяющих осуществить эту функцию с их преимуществами и, в частности, присущими им недостатками.
Известны, например, системы потенциометрических линейных или угловых датчиков, служащие для измерения перемещения путем изменения величины их сопротивления, это изменение является линейным и оно обрабатывается управляющей электронной платой. Основным недостатком этих потенциометрических линейных или угловых датчиков является наличие двух контактирующих элементов, которые скользят один по другому и каждый из которых закреплен на одной из перемещающихся элементов, причем эти устройства имеют длину, равную (линейному или угловому) перемещению, то есть являются крупногабаритными, и их износ, связанный с трением, вызывает изменение точности во времени и относительно небольшой срок службы.
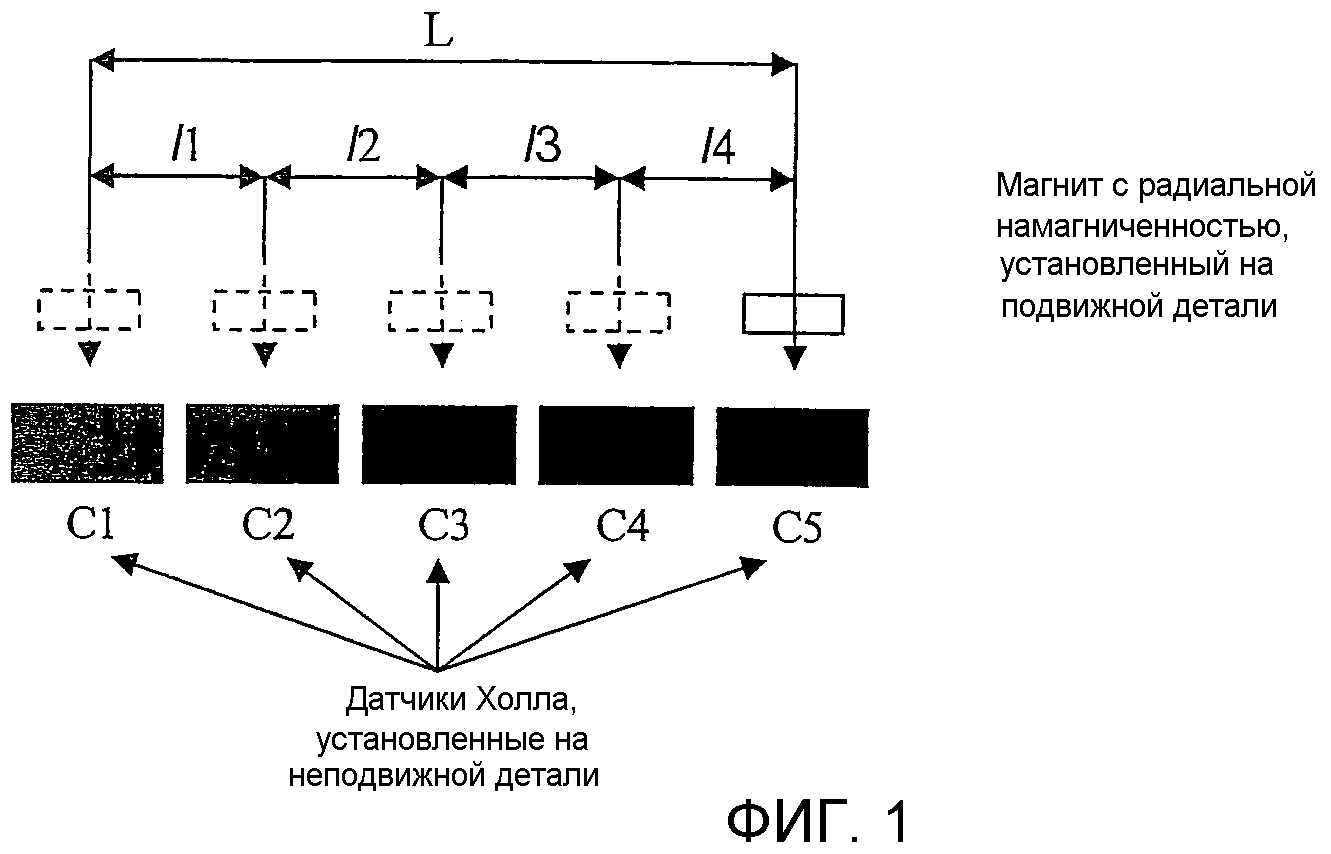
Для исключения контакта между элементами при движении известны системы, использующие несколько датчиков Холла С1, С2, С3, С4, С5, установленные последовательно на неподвижном элементе, и магнит с радиальной намагниченностью, закрепленный на подвижном элементе, при этом датчики Холла выдают сигнал, когда перед ними появляется магнитное поле.
Такое решение, изображенное по схеме на фиг.1, имеет те недостатки, что требуется использование значительного количества дорогостоящих датчиков и, в особенности, не позволяет точно знать положение перемещающегося элемента между двумя датчиками, что обеспечивает лишь невысокую точность. Общий ход L является суммой перемещений I1+I2+I3+I4, точность определяется, таким образом, перемещением между двумя датчиками. Невозможно определить с точностью какое-либо положение перемещения без наличия большого количества датчиков, что физически невозможно.
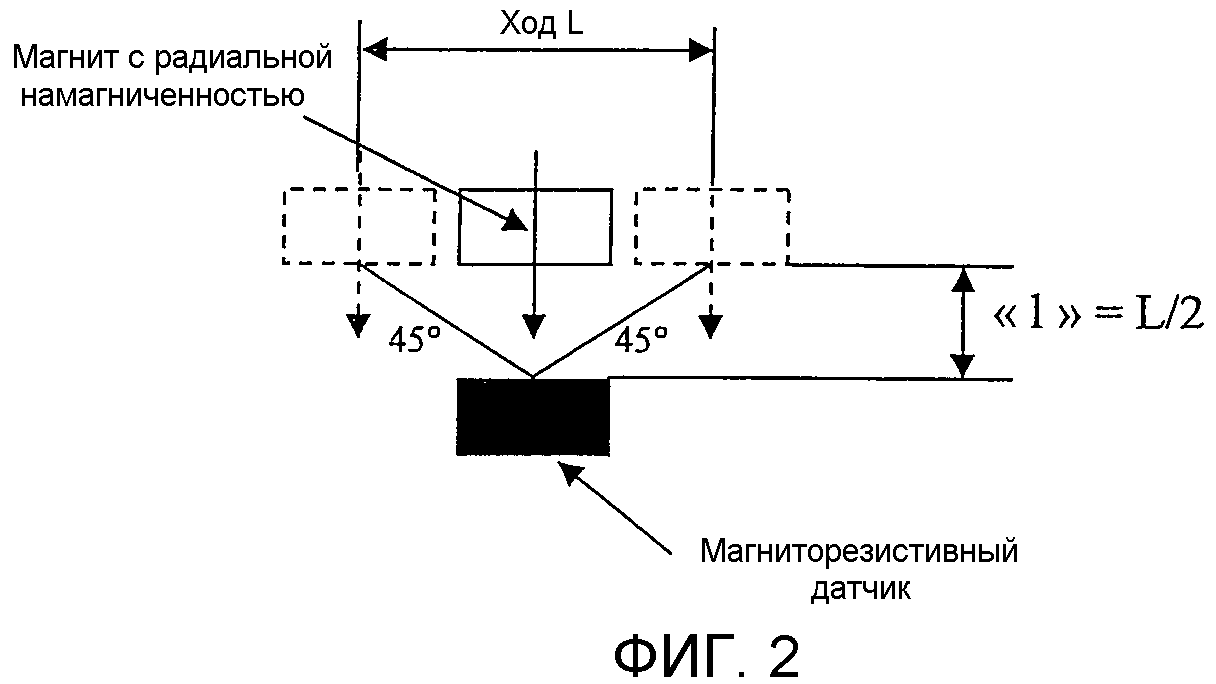
Известны также системы, использующие магниторезистивный датчик (особенностью которого является измерение наклона силовых линий в магнитном поле), взаимодействующий с магнитом с радиальным намагничиванием (намагничивание выполнено перпендикулярно магниту).
Преимуществом этого технического решения, представленного схемой на фиг.2, является простота, бесконтактная работа, но недостатком его в то же время является отсутствие точности и необходимость наличия значительного расстояния между датчиком и магнитом, особенно при значительном ходе. В соответствии с этой схемой видно, что для заданного хода измеряют в конце хода наклон в 45° от линии магнитного поля, при этом расстояние между магнитом и датчиком «I» должно быть равно L/2. Кроме того, чем больше ход, тем больше увеличивается расстояние «I». Более того, при увеличении расстояния магнитное поле магнита должно быть сильнее, чтобы оно было определено датчиком.
Известно также (DE-19612422, ЕР-0997706, ЕР-1074818, FR-2898189) устройство для определения относительного положения двух взаимодействующих элементов, один из которых выполнен подвижным в линейном направлении, при этом один из этих элементов снабжен магнитом с ориентированным намагничиванием, тогда как другой элемент снабжен магниторезистивным датчиком, при этом способ позволяет анализировать аналоговые электрические данные, передаваемые магниторезистивным датчиком в соответствии с наклоном силовых линий магнитного поля, которые попадают на него, для точного определения относительного положения двух элементов.
Изобретение касается использования таких устройств в портативных электроинструментах и, в частности, в электрических секаторах или подобных режущих инструментах, в которых предпочтительно знать и контролировать весьма точно без контакта с механическими элементами направление движения и положение по меньшей мере между двумя взаимодействующими элементами таких инструментов.
Известным образом такие электрические секаторы содержат подвижный режущий нож, установленный на переднем конце корпуса, служащего в качестве ручки, внутри которого установлен электрический редукторный двигатель, выход которого соединен с упомянутым подвижным ножом с помощью подвижного приводного элемента или приводного механизма, а также шарнирный пусковой механизм, позволяющий снаружи корпуса включать устройство электрического управления.
Известно встраивание в эти инструменты устройств, позволяющих более или менее точно контролировать положение привода режущего инструмента и, следовательно, положение собственно режущего инструмента в процессе его открывания и закрывания в зависимости от управляющей команды, данной пользователем через пусковой механизм так, чтобы обеспечить автоматическое управление перемещением упомянутого режущего инструмента в зависимости от перемещения пускового механизма для обеспечения точности подрезки, удобства и безопасности.
В документе FR-2614568 описан переносной электроинструмент с системой автоматического регулирования по положению, в котором подвижный элемент привода поворотного режущего инструмента образован гайкой шариковой системы винт-гайка, которая может осуществлять осевое перемещение в том или ином направлении в зависимости от вращения винта и в котором поворотный пусковой механизм, включающий устройство электрического управления, воздействует на упомянутую гайку, которая, следовательно, осуществляет линейное перемещение. Такие прямолинейные перемещения пускового механизма ограничивают длину хода гайки на длину пальца пользователя. Кроме того, так как блок устройства электрического управления перемещается вместе с гайкой, необходимо соединить упомянутый блок с соединителем с помощью гибкой связи или гибкой цепи, при этом износ этой гибкой цепи может служить причиной нарушений в работе.
В документе FR-2770372 описаны различные варианты выполнения портативного режущего инструмента с механическим приводом, в соответствии с которым положение подвижного режущего инструмента определяется множеством датчиков Холла, распределенных по дуге окружности на неподвижном элементе корпуса элемента так, чтобы обеспечить определение угловых перемещений магнита, закрепленного на элементе, жестко связанном с упомянутым поворотным режущим инструментом. Недостатком этого инструмента является то, что он не позволяет знать с высокой точностью положение поворотного режущего инструмента (точность равна углу между двумя датчиками), а также то, что он является дорогим из-за обязательного использования множества дорогостоящих датчиков Холла.
Другим объектом изобретения является предложение пользователям электрических секаторов, свободных от недостатков ранее представленных электрических режущих инструментов и позволяющих улучшить точность и скорость работ по подрезке, а также более безопасных для пользователя путем более точного управления положением открывания режущего инструмента в зависимости от положения пускового механизма, управляемого пользователем.
Электрические секаторы, в которых применимо изобретение, содержат по меньшей мере один активный подвижный орган, установленный на ближнем конце корпуса, который служит в качестве ручки и внутри которого размещен электрический редукторный двигатель, выход которого связан с активным подвижным органом передаточным механизмом, причем эти электрические секаторы содержат также поворотный пусковой механизм с доступом снаружи корпуса, а также связанное с платой электронного управления редукторным двигателем устройство электронного управления, включаемое пусковым механизмом.
Портативный электроинструмент по изобретению содержит, в частности:
- с одной стороны, приводной механизм, содержащий два взаимосвязанных элемента, по меньшей мере один из которых выполнен подвижным в линейном или угловом направлении, при этом подвижный элемент привода обеспечивает перемещения подвижного органа; и
- с другой стороны, управляющее устройство позволяет управлять работой приводного механизма, причем это устройство содержит два взаимодействующих элемента, по меньшей мере один из которых выполнен подвижным в линейном или угловом направлении;
при этом портативный электроинструмент отличается тем, что один из элементов, взаимодействующих с приводным механизмом и управляющим устройством, снабжен магнитом с ориентированной намагниченностью, тогда как другой элемент снабжен магниторезистивным датчиком;
причем портативный электроинструмент содержит также электронную плату контроля и управления, содержащую микропроцессор, при этом электронная плата выполнена с возможностью выполнения анализа аналоговой или цифровой электрической информации, выдаваемой каждым магниторезистивным датчиком в зависимости от наклона считываемых им силовых линий магнитного поля, для управления работой приводного механизма и точного позиционирования подвижного органа в соответствии с положением устройства управления.
Точнее говоря:
- с одной стороны, магниторезистивный датчик жестко установлен на элементе корпуса, или на элементе, выполненном как одно целое с корпусом, и пусковой механизм, предпочтительно его свободный конец, снабжен магнитом с магнитно-ориентированными силовыми линиями, который может быть перемещаться относительно магниторезистивного датчика при повороте пускового механизма; и
- с другой стороны, магниторезистивный датчик жестко установлен в корпусе инструмента, а магнит с магнитно-ориентированными силовыми линиями выполнен как одно целое с подвижной гайкой шариковой системы винт-гайка, причем этот магнит с магнитно-ориентированными силовыми линиями может перемещаться относительно магниторезистивного датчика за счет активирования системы винт-гайка.
Следует отметить, что система винт-гайка может быть с подвижной гайкой и вращающимся винтом, и наоборот, при этом следует, между прочим, отметить, что система винт-гайка, которая вызывает движение перемещения, начинающееся с движения вращения, может быть заменена кулачковой системой, либо кривошипно-шатунным механизмом, либо эквивалентной системой.
Благодаря упомянутой выше компоновке, можно знать положение пускового механизма и, таким образом, команды, подаваемые пользователем, а также положение активного подвижного органа, который воздействует на режущий механизм, два положения которого постоянно и точно известны, а также можно поставить положение режущего механизма в зависимость от положения пускового механизма с помощью электронной платы, которая управляет редукторным двигателем, и положением активного подвижного органа, который приводит в действие режущий механизм.
В общем, изобретение основано на оригинальной компоновке портативных электроинструментов, в особенности, электрических или электронных секаторов, в соответствии с которой известные сами по себе особые устройства были приспособлены для получения определенного относительного положения между основными взаимодействующими органами этих аппаратов, образованных соответственно приводным механизмом режущего инструмента и пусковым механизмом устройства управления этим приводным механизмом, причем эти устройства управляются электронной платой управления приводом, позволяющим воздействовать пусковым механизмом на перемещения режущего механизма от приводного механизма.
Электрический секатор или аналогичный режущий инструмент по изобретению имеет, кроме того, другие интересные преимущества.
Например:
- он не содержит электронных компонентов в движении, что обеспечивает высокую надежность в работе;
- он обеспечивает малое расстояние между компонентами определяющего устройства (магнит с ориентированной намагниченностью и магниторезистивный датчик), что исключает необходимость использования магнитов с сильной намагниченностью и позволяет уменьшить габариты инструмента;
- отсутствует контакт между компонентами определяющего устройства и, следовательно, износ последних;
- он не требует использования магнитов с сильной намагниченностью;
- он осуществляет непосредственное считывание положения приводного механизма в зависимости от наклона линий магнитного поля магнитов, таким образом отсутствует необходимость осуществления расчетов для определения этого положения.
В дальнейшем изобретение поясняется нижеследующим описанием, не являющимся ограничительным, со ссылками на сопровождающие чертежи, на которых:
фиг.1 изображает схему первого известного определяющего устройства, используемого в системе для определения положения подвижной детали;
фиг.2 изображает схему другого известного определяющего устройства;
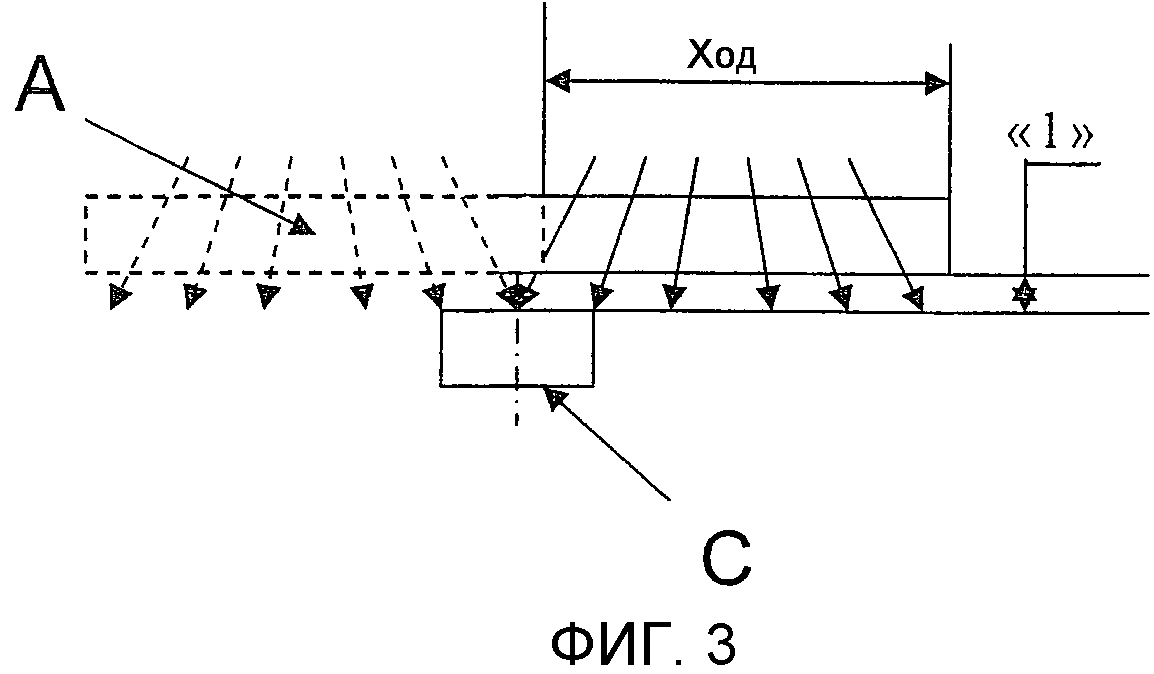
фиг.3 изображает схему первого варианта осуществления другого известного способа определения, применимого в системе, позволяющей знать положение подвижного элемента при линейном перемещении;
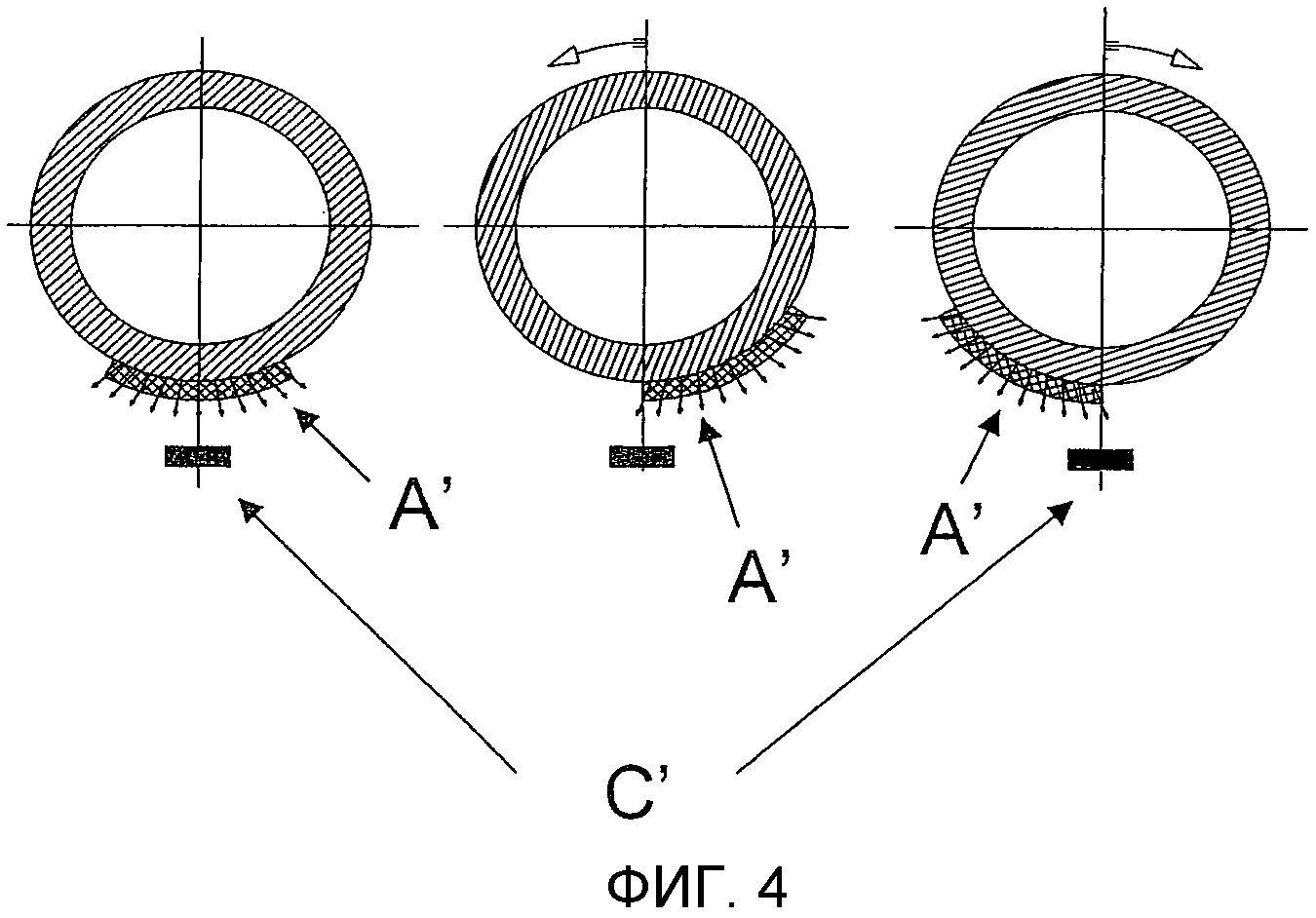
фиг.4 изображает схему второго варианта осуществления способа определения, представленного на фиг.3, используемого в системе, позволяющей знать положение подвижного элемента при угловом перемещении;
фиг.5 представляет вертикальный вид с частичными вырезами электрического секатора по изобретению;
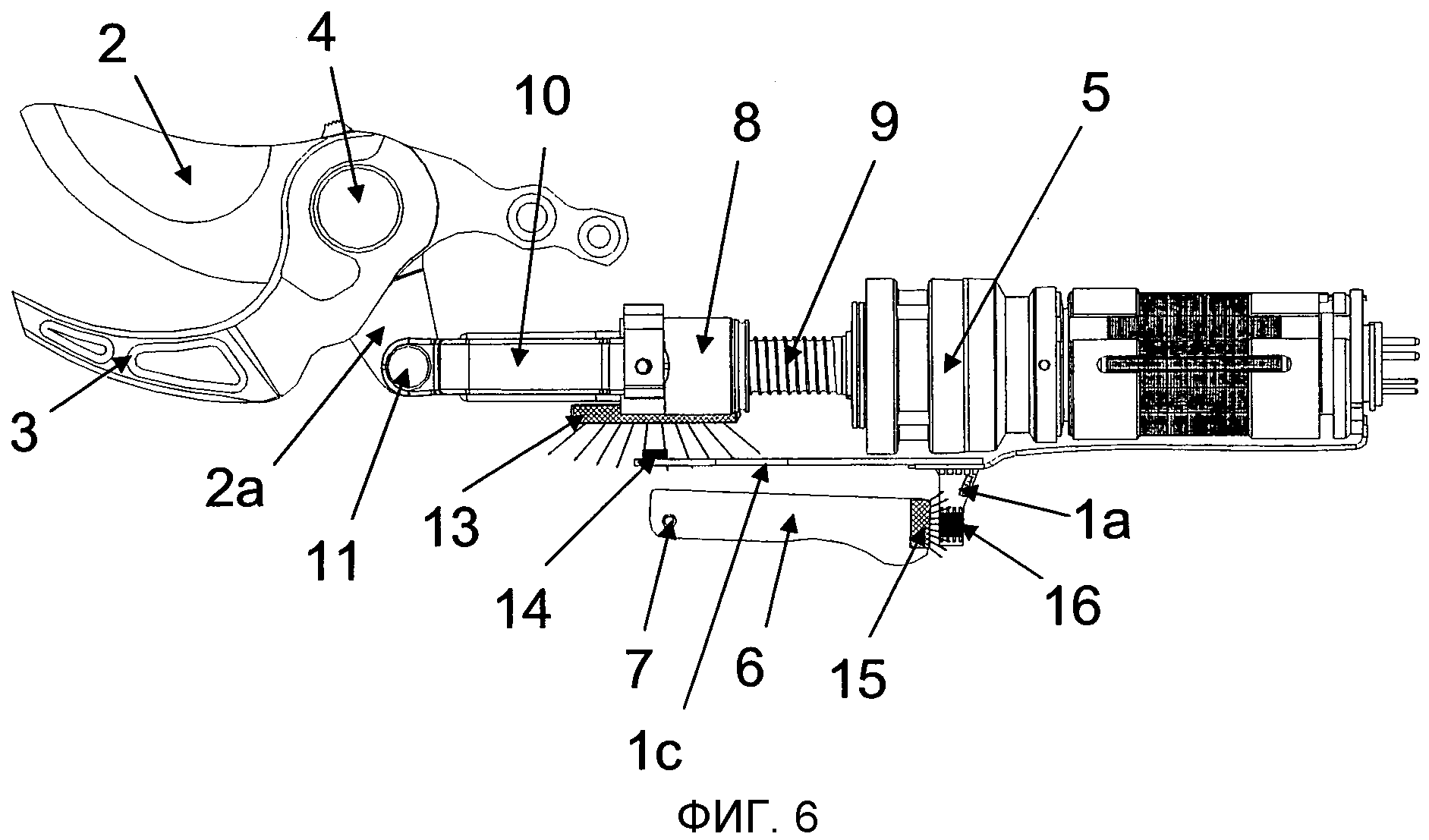
фиг.6 упрощенно представляет вертикальный вид этого секатора;
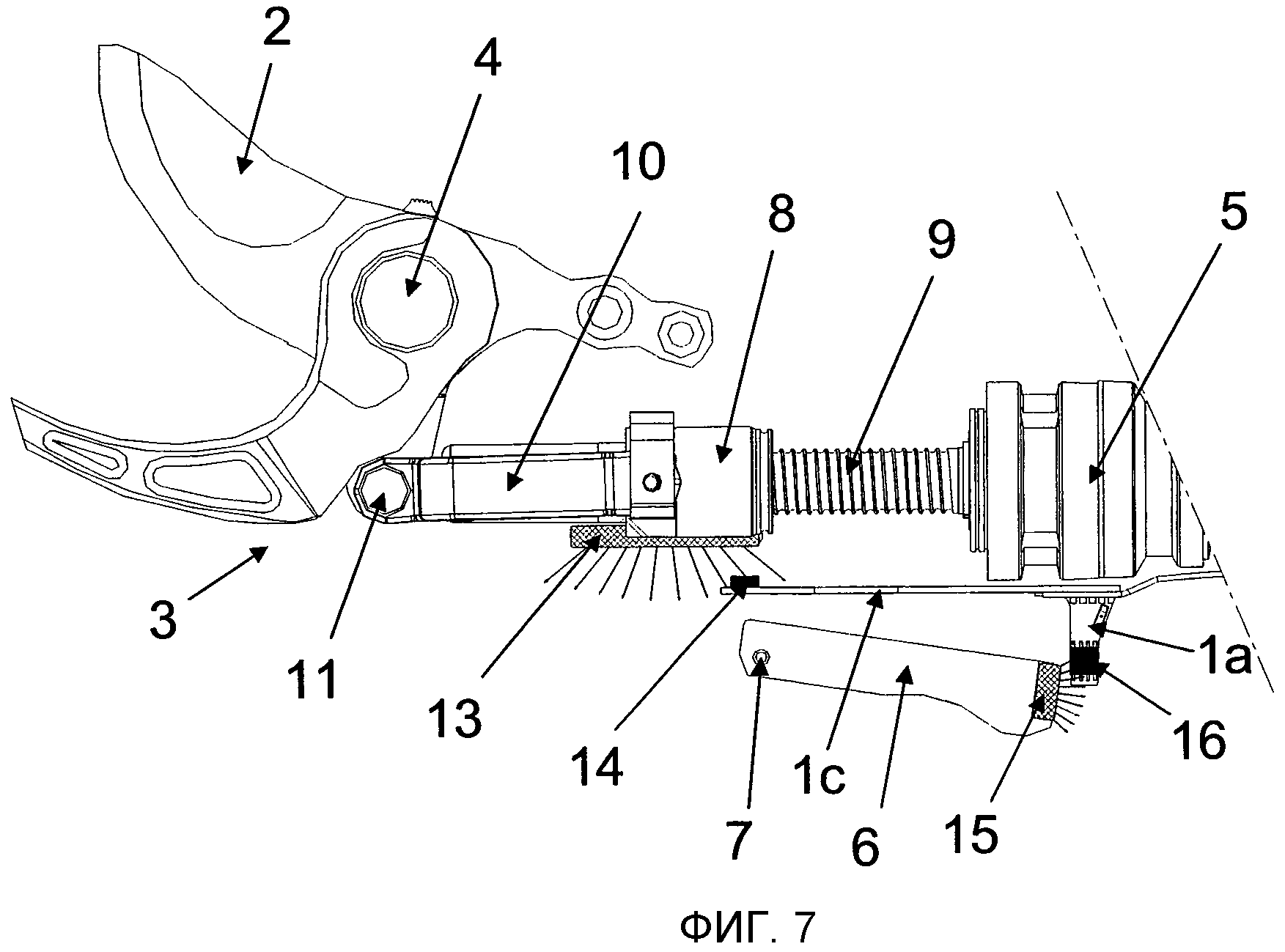
фиг.7 детально изображает фиг.6 в крупном масштабе и показывает основные компоненты секатора по изобретению, при этом его подвижный режущий инструмент изображен в положении полного открывания;
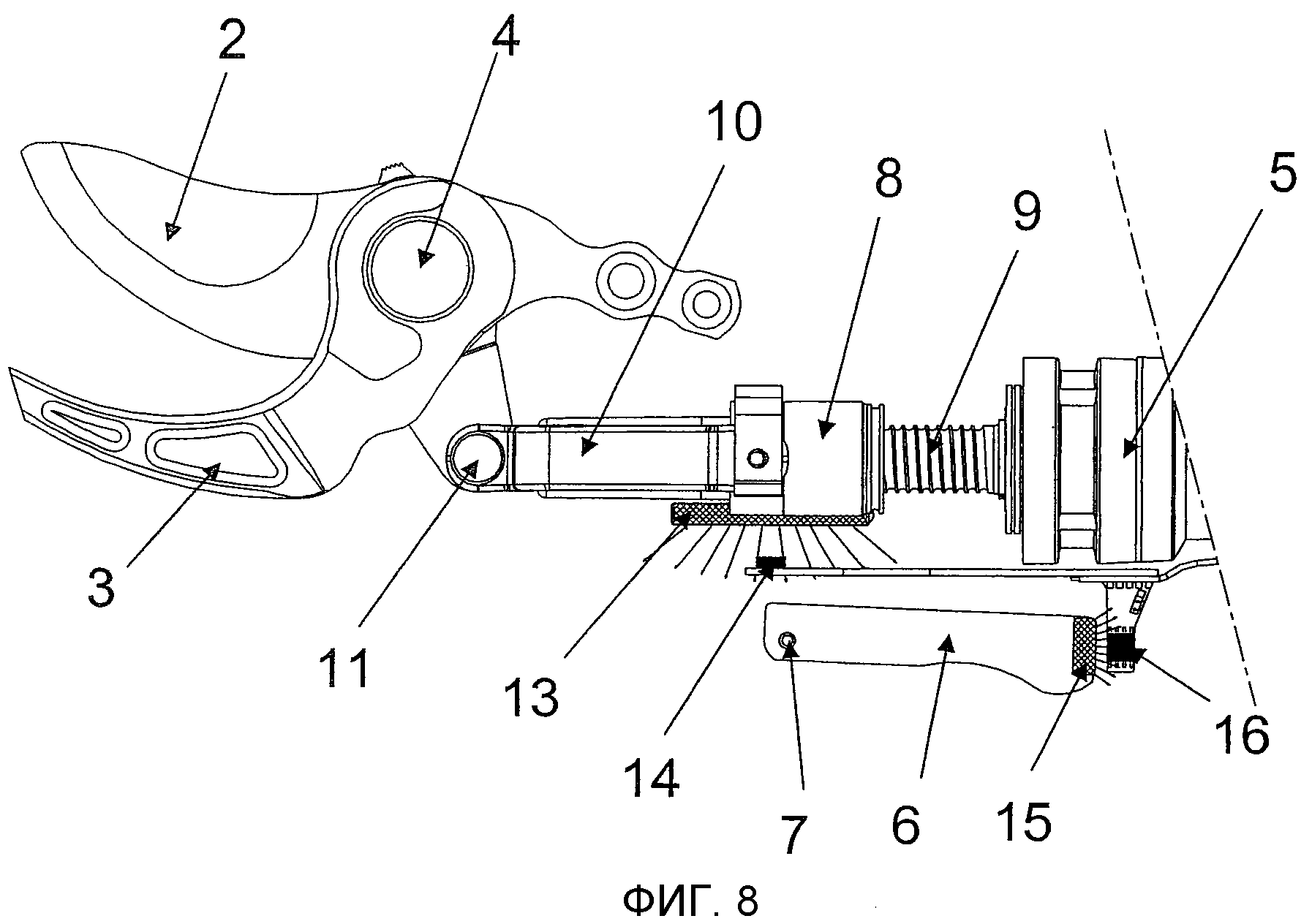
фиг.8 изображает детальный вид, аналогичный фиг.7 и показывает режущий инструмент в положении частичного открывания (полуоткрытым);
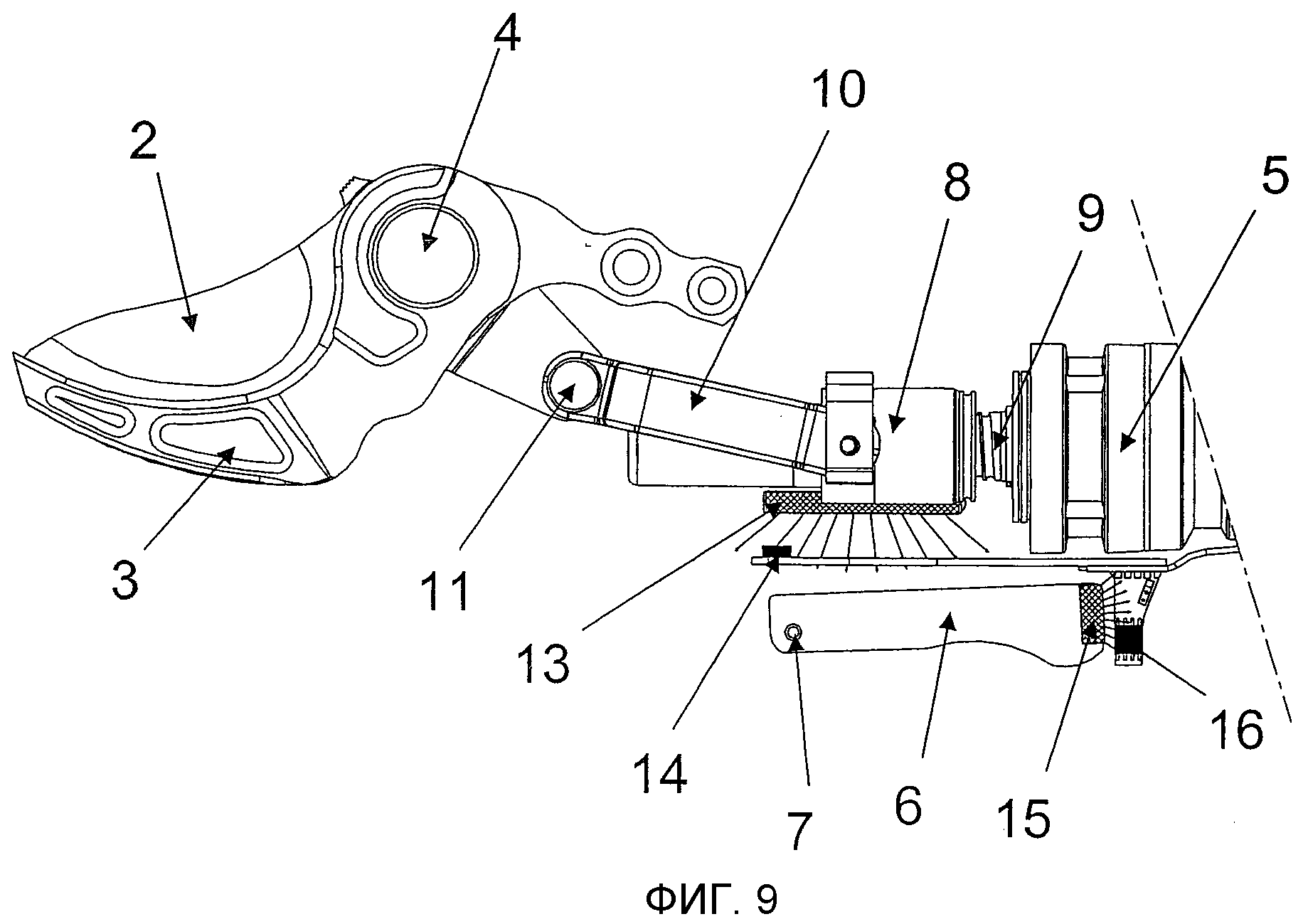
фиг.9 изображает детальный вид, аналогичный фиг.7 и 8 и показывает подвижный режущий инструмент в положении закрывания.
Обратимся к упомянутым чертежам для описания интересного не ограничивающего примера выполнения портативного электроинструмента по изобретению, который в соответствии с этим предпочтительным примером является электрическим секатором.
Схемы по фиг.3 и 4 изображают два примера осуществления способа определения относительного положения двух взаимодействующих элементов, по меньшей мере один из которых выполнен подвижным, при этом электромагнитные механизмы обеспечивают работу портативных электроинструментов по изобретению.
В соответствии с известным способом упомянутый подвижный элемент выполнен как одно целое с магнитом А с ориентированной намагниченностью, то есть магнитом, силовые линии магнитного поля которого наклонены в сторону, обратную от его центра, при этом этот магнит с ориентированной намагниченностью расположен перед магниторезистивным датчиком С, закрепленным на неподвижном элементе 1с.
В соответствии с вариантом воплощения, представленным схемой по фиг.3, магнит А считается закрепленным на подвижной элементе с линейным перемещением.
Изображение сплошными линиями и изображение пунктирными линиями иллюстрируют два крайних положения магнита А с ориентированной намагниченностью относительно магниторезистивного датчика С.
В соответствии со вторым вариантом воплощения, изображенным схемой работы на фиг.4, изогнутый магнит A' с ориентированной намагниченностью жестко установлен на цилиндрическом элементе Р с угловым перемещением. На этом чертеже изображены три положения магнита А' с намагниченностью, ориентированной относительно магниторезистивного датчика С:
- на левой стороне чертежа магнит А' изображен в центральном положении;
- центральная часть чертежа изображает угловое перемещение против часовой стрелки элемента Р и магнита A';
- при этом на правой части чертежа магнит A' изображен после перемещения по часовой стрелке.
В трех положениях и в любом промежуточном положении между его крайними положениями магнитные силовые линии магнита A' с ориентированной намагниченностью определяются магниторезистивным датчиком С.
Известно также, что магнитные силовые линии магнита A' последовательно наклонены пропорционально их расстоянию относительно центра упомянутого магнита, например, на 1° для 1 мм, затем на 2° для 2 мм и так далее.
Используя магниторезистивный датчик, который позволяет знать градус наклона силовых магнитных линий магнита, можно сделать вывод об угловой величине перемещения магнита и, следовательно, элемента Р (1 мм для 1°, в соответствии с вышеприведенным примером).
Этот вывод и управляющее перемещение выполняются электронной платой контроля, содержащей микропроцессор, и которая получает сигналы, передаваемые датчиком С.
Изобретение касается портативного электроинструмента, имеющего корпус 1, который служит в качестве ручки и на одном из концов которого установлен активный подвижный орган 2, перемещения которого обеспечиваются приводным механизмом 8, и управляющий орган 6, позволяющий управлять работой упомянутого приводного механизма с помощью электронной платы управления и контроля, причем этот портативный электроинструмент, в частности, отличается тем, что приводной механизм 8 использует устройство для определения относительного положения между двумя элементами, один из которых является подвижным, осуществляя заранее заданное линейное или угловое перемещение;
и/или:
тем, что управляющее устройство 6 использует устройство для определения относительного положения между двумя элементами, по меньшей мере один из которых выполнен подвижным.
Ниже описывается весьма предпочтительное использование изобретения в электрических и электронных секаторах. Отметим, однако, что оно может быть использовано в других портативных режущих электроинструментах, таких как ножницы.
Электрические и электронные секаторы содержат обычно полый корпус 1, который служит в качестве ручки и на переднем конце которого установлена режущая головка, содержащая по меньшей мере один подвижный активный орган 2. Обычно этот активный орган образован поворотной режущей кромкой, установленной на встречном ноже или неподвижном крюке 3 посредством оси вращения 4. Внутри корпуса 1 расположен редукторный двигатель 5, выход которого связан с упомянутым подвижным активным органом 2 через передачу. Эти электрические или электронные секаторы содержат также устройство управления, образованное пусковым механизмом 6, установленным с возможностью поворота на оси 7 и доступным снаружи корпуса 1.
В соответствии с предпочтительным вариантом воплощения, передаточная система, связывающая редукторный двигатель 5 с подвижным режущим ножом 2, содержит подвижную приводную деталь, образованную гайкой 8 системы винт-гайка 8-9 и парой тяг 10.
Вращающийся винт 9 соединен с выходом редукторного двигателя 5, тогда как подвижная в осевом направлении гайка 8 соединена с помощью пары тяг 10 и шарнирных соединений с продолжением рычага 2а, которое имеет поворотный нож 2.
Точнее говоря, тяги 10 с помощью шарниров 11 и 12 соединены с продолжением 2а поворотного ножа 2 и корпусом гайки 8, образующим привод инструмента. Таким образом, любое перемещение последнего посредством тяг 10 приводит к движению поворота подвижного ножа 2 вокруг оси 4 для закрывания или открывания упомянутого ножа относительно неподвижного ножа или крюка 3.
В соответствии с отличительной компоновкой портативный электроинструмент содержит:
- с одной стороны, магнит 13 с ориентированными силовыми линиями магнитного поля, жестко установленный на подвижной гайке 8, и магниторезистивный датчик 14, жестко установленный в корпусе 1, в положении, при котором перемещается упомянутый магнит 13 с ориентированной намагниченностью в процессе линейных перемещений гайки 8 вперед и назад;
- с другой стороны, магнит 15 с ориентированными силовыми линиями магнитного поля, закрепленный на пусковом механизме, предпочтительно на свободном конце последнего и в элементе 1а корпуса 1 или на элементе, выполненном как одно целое с корпусом, жестко установлен магниторезистивный датчик 16, в положении, перед которым может перемещаться упомянутый магнит 15 с ориентированной намагниченностью, установленный на свободном конце поворотного пускового механизма 8, в процессе поворотов последнего.
Предпочтительно, магниторезистивный датчик 16 неподвижно установлен в соединительном элементе 1а, жестко связывающем корпус 1 и предохранительный кожух 1b инструмента, преимуществом чего является усиление этого кожуха и большее удобство использования инструмента, особенно при работе на высоте для исключения его сползания на руку.
Сигналы магниторезистивного датчика 14 передаются на электронную плату контроля (не показана), конфигурированную и запрограммированную для обеспечения управления редукторным двигателем 5, и, следовательно, управления закрыванием или открыванием подвижного режущего механизма 2, а также остановки последнего в любом промежуточном положении между закрыванием и полным открыванием.
Сигналы магниторезистивного датчика 16 передаются на электронную плату контроля (не показана), сконфигурированную и запрограммированную для обеспечения управления редукторным двигателем 5; эта электронная плата контроля может быть той же, что получает сигналы датчиков 14.
Точнее говоря, эта электронная плата контроля и управления, содержащая микропроцессор, сконфигурирована для осуществления анализа электрической аналоговой или цифровой информации, передаваемой каждым магниторезистивным датчиком 14, 16, в зависимости от наклона силовых линий магнитного поля, попадающих на него, для управления работой приводного механизма 8 для точного позиционирования подвижного органа 2 в зависимости от положения управляющего устройства 6.
Понятно, что изобретение может быть использовано как для системы управления приводным механизмом 8 поворотного ножа 2 (магнит 13 с ориентированной намагниченностью и магниторезистивный датчик 14) для управления открыванием последнего, так и для системы управления, содержащей пусковой механизм 6 (магнит 15 с ориентированной намагниченностью и магниторезистивный датчик 16), чтобы знать ход перемещения упомянутого пускового механизма.
Понятно также, что когда пусковой механизм 6 перемещают на определенный угол (величина перемещения ножа 2 задается пользователем) и, следовательно, соединенный с ним магнит 15 с ориентированной намагниченностью, магниторезистивный датчик 16 считывает угол наклона магнитных силовых линий упомянутого магнита 15, соответствующий угловому перемещению упомянутого пускового механизма 6.
Эта величина, считанная магниторезистивным датчиком 16, передается на электронную плату управления и контроля редукторного двигателя 5, которая дает ему команду осуществить движение приводного механизма в желаемом направлении шариковым устройством винт-гайка 8-9 для перемещения ножа 2 посредством тяг 10.
Когда гайка 8 перемещается для выполнения этого действия, магнит 13 с ориентированным намагничиванием, который закреплен на упомянутой гайке, перемещается перед магниторезистивным датчиком 14, закрепленным на корпусе 1 инструмента.
Когда магниторезистивный датчик 14 считывает угол наклона силовых линий магнитного поля магнита 13 с ориентированной намагниченностью, соответствующий перемещению, управляемому электронной платой контроля, последняя немедленно останавливает редукторный двигатель 5.
Известно, что таким образом можно точно определить положение ножа 2 как при закрывании, так и при открывании, и обеспечить точное положение пускового механизма, управляемого пользователем.
Короче говоря, изобретение состоит во введении в определенные места портативных электроинструментов особых устройств для определения относительного положения между основными взаимодействующими органами этих аппаратов, образованных, соответственно, приводом их подвижных ножей и пусковым механизмом, управляющим этим приводом, причем эти устройства управляются электронной платой, обеспечивающей точные перемещения режущего инструмента, связанной с пусковым механизмом.
Совершенно очевидно, было бы возможно для пускового механизма и в случае секаторов, режущий механизм которого приводится непосредственно нелинейным поворотным механизмом (например, секаторы типа, описанные в документах FR-2670372, WO-2005/084 416), использовать описанное конструктивное решение для угловых перемещений, изображенных на фиг.4.
Реферат
Изобретение относится к портативным электроинструментам и в особенности, но не исключительно, к электронным секаторам или подобным инструментам, содержащим режущие кромки с контролируемым закрыванием. Сущность изобретения заключается в том, что портативный электроинструмент, в частности, электрический или электронный секатор, имеющий корпус (1), который служит в качестве ручки и на одном из концов которого установлен подвижный активный орган (2), перемещения которого осуществляются приводом (8), отличающийся тем, что подвижный орган привода (8) снабжен магнитом (13) с ориентированной намагниченностью, перемещающимся перед магниторезистивным датчиком (14), закрепленным на неподвижном элементе (1c) корпуса, а также тем, что пусковой механизм (6) снабжен магнитом (15) с ориентированной намагниченностью, который перемещается перед магниторезистивным датчиком (16), закрепленным на неподвижном элементе (1a) корпуса, при этом портативный электроинструмент содержит также электронную плату для анализа информации, поступающей от каждого магниторезистивного датчика (14, 16), в зависимости от наклона силовых линий магнитного поля, попадающих на него, для управления работой привода (8) с целью точного позиционирования подвижного органа (2) в зависимости от управляющего устройства (6). Технический результат - повышение надежности электроинструмента, повышение точности и скорости работ по подрезке. 5 з.п. ф-лы, 9 ил.
Формула
с одной стороны, приводной механизм (8), содержащий два взаимодействующих элемента (8, 1c), по меньшей мере один (8) из которых выполнен подвижным в линейном или угловом направлении, при этом подвижный элемент (8) приводного механизма обеспечивает перемещения упомянутого подвижного органа (2); и
с другой стороны, управляющее устройство (6) для управления работой приводного механизма (8), содержащее два взаимодействующих элемента (6, 1a), по меньшей мере один (6) из которых выполнен подвижным в линейном или угловом направлении;
отличающийся тем, что:
с одной стороны, один из взаимодействующих элементов приводного механизма (8) снабжен магнитом (13) с ориентированной намагниченностью, тогда как другой элемент (1c) снабжен магниторезистивным датчиком (14), и
с другой стороны, один из взаимодействующих элементов управляющего устройства (6) снабжен магнитом (15) с ориентированной намагниченностью, тогда как другой элемент (1a) снабжен магниторезистивным датчиком (16);
при этом портативный электроинструмент содержит также электронную плату контроля и управления, содержащую микропроцессор, причем электронная плата выполнена с возможностью обеспечения анализа аналоговой или цифровой электрической информации, передаваемой каждым магниторезистивным датчиком (14, 16), в зависимости от наклона силовых линий магнитного поля, попадающих на него, для управления работой приводного механизма (8) и точного позиционирования подвижного органа (2) в зависимости от положения управляющего устройства(6).
Документы, цитированные в отчёте о поиске
Портативный автономный электросиловой инструмент
Комментарии