Транспортное средство с системой обеспечения безопасности, включающей в себя прогнозирование усталости водителя - RU2561657C2
Код документа: RU2561657C2
Чертежи



Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к транспортному средству с системой обеспечения безопасности и к способу для такого транспортного средства согласно преамбулам независимых пунктов формулы изобретения.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Вплоть до 40% всех дорожно-транспортных происшествий могут происходить вследствие усталости, хотя этот факт является труднодоказуемым. Риск генерации необоснованных предупреждений, которые, следовательно, не воспринимаются, означает, что отсутствует какой-либо способ надежного предупреждения водителей при помощи существующих в настоящее время способов.
В научном сообществе признано, что существует связь между усталостью и поведением при управлении транспортным средством, тем, насколько хорошо транспортное средство остается в пределах его полосы движения, и даже тем, как люди моргают. Однако отсутствует какое-либо одно пороговое значение или какая-либо одна функция, определенное значение/характер поведения которых единообразно указывали бы на то, что водитель устал.
Патент США US 6313749 B1 относится к обнаружению усталости водителя транспортного средства, в нем используют несколько различных датчиков для регистрации состояния транспортного средства и внимательности водителя, и сигналы от датчиков преобразовывают в весовые коэффициенты, которые используются для настройки модели, отражающей биологический суточный ритм водителя. Настроенную модель затем используют для генерации предупреждений для водителя.
Патент США US 6661345 B1 относится к системе текущего контроля, предназначенной для текущего контроля внимательности водителя транспортного средства. В частности, эта система содержит акустический датчик или микроволновый датчик. Выходные сигналы от датчика обрабатывают с использованием алгоритма, учитывающего внимательность водителя, и генерируют обработанный сигнал. Обработанный сигнал затем используют для оценки внимательности водителя.
Затруднения, связанные с многими системами, используемыми в настоящее время для предупреждения водителя, когда он или она устали, состоят в необходимости индивидуальной адаптации систем, поскольку невозможно использовать общее пороговое значение, применимое ко всем водителям, что делает их непригодными для непосредственного предупреждения водителя. Для некоторых водителей эти системы вообще не будут генерировать предупреждения, даже если усталость водителя является угрожающей, тогда как для других водителей эти системы генерируют предупреждение даже в том случае, если водитель является очень внимательным. Следовательно, эти системы лишь незначительно повышают безопасность дорожного движения, и существует риск того, что все аналогичные системы не будут широко применяться при частом появлении ложных предупреждений.
Некоторые способы требуют большого количества дополнительного оборудования, которое должен носить водитель, или большого объема информации, которую водитель должен вручную вводить в систему/способ.
В научном сообществе признано, что существует относительно общий суточный ритм человека. Исследователями из Шведского научно-исследовательского института стресса, Торбьерном Экерстедтом (Torbjorn Akerstedt) и др., была разработана модель суточного ритма, именуемая моделью “прогнозатора сна/бодрствования” (“Sleep/Wake Predictor”, SWP), в которой, в частности, используют предшествующий сон и отрезок времени с момента пробуждения в качестве базиса для аппроксимации степени внимательности человека.
В частности, эта модель основана на трех составляющих, а именно: на степени внимательности (S), на циркадном ритме (C) в течение 24 часов, который характеризует биологический режим сна, и на 12-часовом ультрадианном ритме (U), основанном на биологической активности в дневное время, например, после того как человек поел, также известном как “снижение активности после обеда” ("after-lunch dip").
На саму степень внимательности влияют три фактора, а именно: время суток, отрезок времени с момента пробуждения и продолжительность сна. В частности, представляет собой время с момента пробуждения, и его моделируют как экспоненциальную функцию, имеющую максимальное значение в момент пробуждения человека ото сна и асимптотически затухающую в конце периода бодрствования. Когда человек засыпает, способ "восстановления" внимательности в течение периода сна состоит в том, что степень внимательности быстро повышается в начале сна, но темп роста асимптотически снижается в конце периода сна.
Функциями, используемыми для вычисления , являются следующие:
Уравнение 1
где - время по показаниям часов, выраженное в часах, - момент времени, когда человек просыпается, - скорость затухания и - нижняя горизонтальная асимптота.
Уравнение 2
где - время, когда человек отходит ко сну, а - верхняя горизонтальная асимптота.
Уравнение 3
Константы в уравнениях 1-3 имеют следующие значения, заданные по умолчанию: =2,4, =0,0353 и =14,3.
представляет собой увеличение усталости человека, спавшего слишком мало в течение нескольких дней подряд, и учитывает трудность сверхбыстрого восстановления вследствие длительного периода недостаточного сна. Это ограничение было введено в качестве контрольной точки для предотвращения слишком крутого роста экспоненциальной функции для конкретного значения .
Общим результатом является приведенный ниже набор функций для определения :

Постоянная связана с контрольной точкой и имеет величину, равную 12,2, а переменная представляет собой время, когда равно .
Следует отметить, что изобретение не ограничено вышеизложенными константами для определения , поскольку, конечно же, могут использоваться иные их значения для адаптации вычислений согласно доминирующим обстоятельствам.
Таким образом, процесс отображает биологические часы человеческого тела, циркадный ритм, и он смоделирован с использованием синусоиды, имеющей максимальное значение в дневное время, которая задана следующим выражением:
,
где - время по показаниям часов, выраженное в часах, а константы равны =2,5 и =18.
Процесс отображает ультрадианный ритм с ослаблением внимательности в момент времени, соответствующий 15,00 часам, заданный следующим выражением:
,
где - время по показаниям часов, выраженное в часах, а константы равны =-0,5, =0,5 и =15.
, и вычисляют путем подстановки значения времени по показаниям часов в формулы.
Вычисление , и дает их текущие значения при =0 и их будущие значения при .
Для полного обзора модели SWP приведены ссылки на следующие противопоставленные материалы:
"Predicting road crashes from a mathematical model of alertness regulation - The Sleep/Wake Predictor”. Accident Analysis and Prevention, 40, pp. 1480-1485, by Åkerstedt, T et al. (2008) и
“Predictions from the three-process model of alertness”. Aviat. Space Environm Med, 75(3, Suppl.), A75-83, by Åkerstedt, T., Folkard, S., & Portin, C. (2004).
Таким образом, модель SWP позволяет определить компоненты , и , и их совокупность может использоваться для вычисления значения на шкале усталости, так называемой “Каролинской шкале сонливости” (Karolinska Sleepiness Scale, KSS), с использованием следующей формулы: .
Шкала KSS может допускать наличие значений от 1 до 9, где низкие значения означают, что человек является внимательным, а высокие значения означают, что человек устал, например:
1 - очень внимательный,
5 - являющийся ни сонливым, ни внимательным,
7 - утомленный, но способный находиться в состоянии бодрствования без усилий,
9 - очень утомленный, бодрствование требует усилий.
Задача настоящего изобретения состоит в том, чтобы предложить усовершенствованную систему обеспечения безопасности для транспортного средства, которую легче использовать, чем существующие системы, и которая обеспечивает учет различных режимов активности и отдыха различных водителей.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Вышеупомянутые задачи решены в настоящем изобретении, сформулированном в независимых пунктах формулы изобретения. Предпочтительные варианты осуществления изобретения сформулированы в зависимых пунктах формулы изобретения.
Настоящее изобретение относится к системе и к способу, которые, за счет применения модели SWP, приспособлены для оценки текущей и будущей степени усталости водителя или способности управлять транспортным средством, и используют ее для регулировки других вспомогательных систем в транспортном средстве или для предоставления информации, например, в центр управления движением транспорта.
В способе сначала учитывают время суток, например, путем его считывания с тахографа, а затем проверяют, если это возможно, предшествующий суточный ритм водителя. Соответствующими показателями являются ритм активности/суточный ритм водителя за несколько последних дней. Наилучшим случаем является тот, когда водителем использовалось только лишь данное транспортное средство и он имеет карту водителя, содержащую полную информацию о времени его/ее работы в рейсе и о времени его/ее отдыха. Наихудшим случаем является отсутствие информации о предшествующих действиях.
При наличии полной информации можно использовать время суток и предыдущее время работы водителя в рейсе для вычисления максимальной продолжительности сна, который он или она могли иметь. Эта информация может быть дополнена указаниями из других систем транспортного средства. Например, факт настройки радиоприемника или системы кондиционирования воздуха может указывать, что водитель бодрствовал, замки транспортного средства могут указывать, когда транспортное средство было покинуто и когда водитель, заперший транспортное средство на ночь, вернулся в транспортное средство или вышел для начала дневной смены. Если водитель спал в транспортном средстве, то датчик движения в устройстве сигнализации может указывать, когда он или она ложится спать и впоследствии встает. Общим результатом является лучшая картина предшествующего сна.
Если информация отсутствует или является неполной, то способ продолжают на основании соответствующей максимальной продолжительности предшествующего отдыха.
Сведения об отдыхе и о времени суток обеспечивают смоделированную оценку того, насколько усталым/внимательным является водитель, а также того, как эта оценка вероятно изменится при вождении. В этом случае, например, система предупреждения о выезде за пределы полосы движения может генерировать предупреждение раньше и/или более настойчиво, когда эта оценка является высокой, или отключать круиз-контроль или увеличивать расстояние до транспортных средств, движущихся впереди, при наличии адаптивного круиз-контроля. При наличии системы автоматического экстренного торможения пороговое значение для раннего предупреждения или торможения уменьшено для обеспечения возможности более ранней генерации предупреждений или более раннего приведения в действие тормоза. Также эта оценка может быть отображена на дисплее для водителя или предоставлена в центр управления движением транспорта для облегчения планирования текущего рейса и будущих рейсов без рисков.
При наличии других систем обнаружения/прогнозирования усталости, например, систем, основанных на поведении водителя при управлении транспортным средством, на перемещениях транспортного средства в его полосе движения или на режиме моргания водителя, эта оценка может быть использована для повышения их надежности.
В системе и в способе согласно настоящему изобретению также используют информацию, собранную из транспортного средства, например о времени суток. Предшествующий суточный ритм водителя оценивают, например, по карте водителя. Для определения суточного ритма в настоящем изобретении используют другие системы, имеющиеся в транспортном средстве, в качестве указателей того, является ли водитель спящим или отдыхающим.
Можно частично избежать неопределенности относительно усталости, которая делает прямые предупреждения непригодными, не влияя на восприятие. Все системы, такие как LDW (предупреждения о выезде за пределы полосы движения), AEB (автоматическое экстренное торможение), AiCC (адаптивный круиз-контроль), круиз-контроль и система помощи водителю фирмы "Scania" (Scania Driver Support), имеют различные параметры, определяющие то, когда и как их приводят в действие, или как производят оценку состояния водителя и выдают ему рекомендации.
Например, система LDW, которая предупреждает об "отклонении" транспортного средства от его полосы движения, может быть настроена так, что выдает предупреждение раньше и более настойчиво, когда состояние водителя оценено как состояние усталости. Система AEB может выдать более настойчивое предупреждение и включить торможение раньше. Система помощи водителю фирмы "Scania" (Scania Driver Support) обеспечивает возможность назначения водителям/перевозчикам, планирующим поездку, оценочных баллов, чтобы водители имели низкие степени усталости. Система помощи водителю фирмы "Scania" (Scania Driver Support), предоставляющая рекомендации по улучшению вождение, может предоставлять рекомендации относительно безопасности дорожного движения после поездки, при которой состояние водителя было оценено как переутомление.
Способ и система согласно настоящему изобретению также могут предоставлять водителю и/или перевозчику/центру управления прямую оценку того, когда во время поездки состояние водителя будет оценено как усталость, с момента начала рабочей смены водителя. Люди способны оценивать свою собственную усталость, но не доверяют себе или не осознают вероятные последствия.
Преимущества технического решения
- Отсутствует необходимость во вводе водителем какой-либо информации. Информацию собирают из транспортного средства.
- Для оценки поведения водителя не требуются какие-либо дополнительные датчики.
- Сомнительные предупреждения приводят к плохому восприятию; способ согласно настоящему изобретению настраивает существующие системы для повышения безопасности дорожного движения при увеличении вероятности возникновения дорожно-транспортных происшествий.
SWP представляет собой общую модель, и ее не следует считать точной мерой усталости, а скорее вероятной оценкой того, насколько утомлен водитель.
Важным аспектом применения модели SWP и вычисления шкалы KSS является то, что они позволяют прогнозировать степень усталости в будущем, например в течение следующих 36 часов.
Это позволяет, например, вычислять промежуток времени до того, как будет достигнуто заданное пороговое значение по шкале KSS.
Согласно настоящему изобретению, входные сигналы, используемые в модели, поступают из тахографа транспортного средства, из карты водителя и в результате считывания данных из других систем в транспортном средстве, например, через сеть локальных контроллеров (сеть CAN). Отсутствует необходимость в вводе каких-либо данных водителем. Информация о транспортном средстве может быть получена из тахографа, даже когда транспортное средство выключено.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На фиг.1 изображена принципиальная блок-схема, на которой проиллюстрировано настоящее изобретение.
На фиг.2 изображена схема последовательности операций, на которой проиллюстрирован способ согласно настоящему изобретению.
На фиг.3 и фиг.4 показаны графики, на которых проиллюстрированы два варианта осуществления настоящего изобретения.
На фиг.5 изображена схема последовательности операций, на которой проиллюстрирован способ согласно одному из вариантов осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Теперь будет приведено подробное описание изобретения со ссылкой на приложенные чертежи.
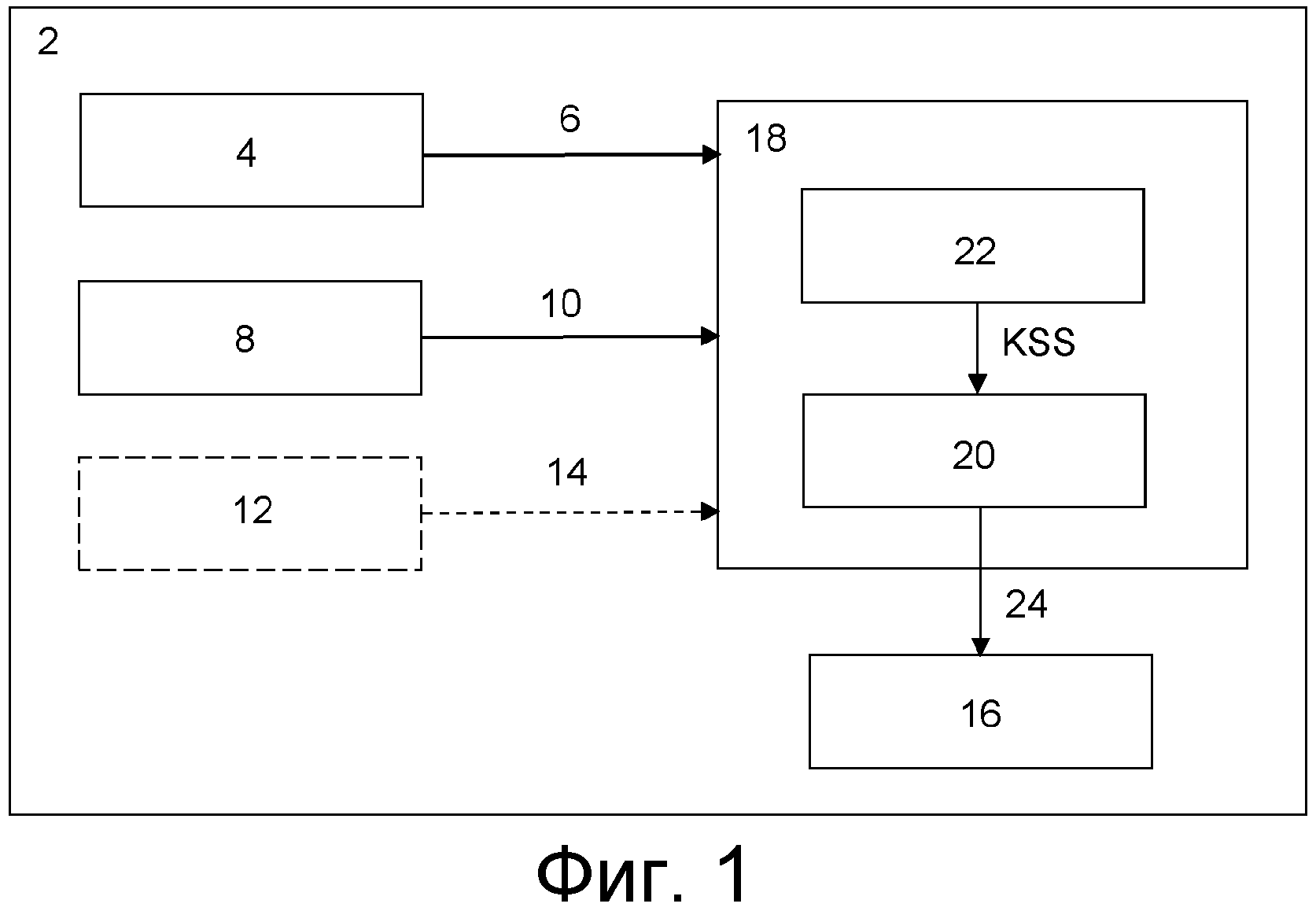
Сначала приведена ссылка на фиг.1, на которой показана принципиальная блок-схема настоящего изобретения.
Таким образом, настоящее изобретение содержит транспортное средство 2, например, грузовик, автобус или автомобиль, снабженный тахографом 4, который приспособлен для генерации сигнала 6 из тахографа, содержащего, в числе прочего, информацию о текущем времени по показаниям часов и о промежутках времени, когда транспортное средство двигалось. Кроме того, транспортное средство содержит блок 8 ввода данных с карты водителя, приспособленный для генерации сигнала 10 с карты водителя, содержащего, в числе прочего, информацию о времени работы водителя в рейсе и о времени его отдыха, и предпочтительно систему 12 текущего контроля, предназначенную для текущего контроля действий водителя, которая приспособлена для генерации сигнала 14, характеризующего внимательность, который содержит информацию о действиях водителя в транспортном средстве. Система текущего контроля может быть выполнена в виде датчиков движения, расположенных таким образом, что они могут, например, обнаруживать перемещения водителя на сиденье водителя или движения его/ее глаз.
Другие перемещения или действия, которые могут быть обнаружены системой текущего контроля, включают в себя настройку водителем радиоприемника транспортного средства.
Система текущего контроля также может быть приспособлена для текущего контроля поведения водителя при управлении транспортным средством или для текущего контроля перемещений транспортного средства в его полосе движения.
Транспортное средство дополнительно содержит одну или более систем 16 помощи водителю, например систему предупреждения о выезде за пределы полосы движения и систему автоматического экстренного торможения.
Кроме того, транспортное средство содержит систему 18 обеспечения безопасности с блоком 20 управления и блоком 22 моделирования внимательности, приспособленным для вычисления текущего значения усталости (по шкале KSS) и спрогнозированных значений усталости (по шкале KSS) для водителя в течение заданного промежутка времени в будущем. Для вычисления значений по шкале KSS используется рассмотренная выше модель внимательности (“прогнозатора сна/бодрствования” - SWP) на основании упомянутого сигнала 6 из тахографа и/или сигнала 10 с карты водителя. Согласно одному из вариантов осуществления изобретения, при вычислении текущего и спрогнозированных значений усталости также используют сигнал 14, характеризующий внимательность.
Вычисленные текущее и спрогнозированные значения усталости (значения по шкале KSS) упорядочивают для передачи в упомянутый блок 20 управления, который приспособлен для определения управляющих сигналов 24 для систем помощи водителю транспортного средства на основании этих значений усталости.
Согласно настоящему изобретению, значение усталости (по шкале KSS) вычисляют с использованием формулы , где обозначает степень внимательности водителя,

Заданный будущий промежуток времени короче 36 часов и предпочтительно короче 12 часов.
Таким образом, значение по шкале KSS может принимать значения от 1 до 9, где 1 - наименьшая усталость, а 9 - наибольшая усталость.
Блок 20 управления вычисляет управляющие сигналы 24 и может, например, воздействовать на пороговые значения для систем 16 помощи водителю таким образом, что чем выше значение по шкале KSS, тем более высокую безопасность обеспечивают установленные параметры системы помощи водителю, а это означает, например, что установка пороговых значений системы помощи водителю, более подходящих для степени усталости, которую имеет утомленный водитель, снижает пороговые значения, делая системы более чувствительными. Систему помощи водителю следует рассматривать как обобщенное понятие, которое может, например, содержать одну или большее количество следующих систем: систему предупреждения о выезде за пределы полосы движения, систему автоматического экстренного торможения и систему индикации в транспортном средстве для отображения вычисленных значений усталости для информирования и предупреждения водителя.
Значение усталости (по шкале KSS) предпочтительно вычисляют непрерывно, а это означает, что текущее значение всегда является доступным и что будущий временной горизонт постоянно изменяется.
Поскольку параметры, влияющие на значение по шкале KSS, изменяются не очень быстро, то отсутствует необходимость в непрерывном вычислении значения по шкале KSS, и его вычисление может производиться через заданный промежуток времени, например от 10 до 1000 секунд между последовательными вычислениями.
Теперь будет приведено описание способа согласно настоящему изобретению, предназначенного для транспортного средства, со ссылкой на схему последовательности операций, показанную на фиг.2.
Способ содержит следующие операции:
(a) по тахографу генерируют сигнал из тахографа, содержащий информацию о текущем времени по показаниям часов и о промежутках времени, когда транспортное средство двигалось,
(b) из блока ввода данных с карты водителя генерируют сигнал с карты водителя, содержащий информацию о времени работы водителя в рейсе и о времени его отдыха.
Транспортное средство дополнительно содержит одну или более систем помощи водителю, например систему предупреждения о выезде за пределы полосы движения и систему автоматического экстренного торможения.
Способ содержит следующие дополнительные операции:
(d) в блоке моделирования внимательности, расположенном в системе обеспечения безопасности, вычисляют текущее значение усталости (по шкале KSS) и спрогнозированные значения усталости (по шкале KSS) для водителя в течение заданного промежутка времени в будущем с использованием модели внимательности (прогнозатора сна/бодрствования - SWP) на основании упомянутого сигнала из тахографа и/или сигнала с карты водителя, и
(e) упомянутые вычисленные текущее и спрогнозированные значения усталости упорядочивают для передачи в блок управления, расположенный в упомянутой системе обеспечения безопасности и приспособленный для определения управляющих сигналов для систем помощи водителю транспортного средства на основании упомянутых значений усталости.
Согласно одному из вариантов осуществления настоящего изобретения, способ также содержит следующую операцию:
(c) из системы текущего контроля, предназначенной для текущего контроля действий водителя, генерируют сигнал, характеризующий внимательность, который содержит информацию о действиях водителя в транспортном средстве. Сигнал, характеризующий внимательность, используют при вычислении текущего и спрогнозированных значений усталости.
Согласно способу из настоящего изобретения, значение усталости (по шкале KSS) вычисляют с использованием следующей формулы: .
Подробное обсуждение задействованных параметров и способа их вычисления было приведено выше, и здесь приведена ссылка на это обсуждение.
Заданный будущий промежуток времени короче 36 часов и предпочтительно короче 12 часов.
Согласно одному из вариантов осуществления способа, управляющие сигналы влияют на значения усталости для систем помощи водителю таким образом, что чем выше значение по шкале KSS, тем более высокую безопасность обеспечивают установленные параметры системы помощи водителю, то есть более высокую чувствительность.
Значение усталости (по шкале KSS) вычисляют с использованием заданного интервала от 10 до 1000 секунд между последовательными вычислениями.
Согласно другому варианту осуществления изобретения, блок управления приспособлен для генерации управляющего сигнала для системы индикации в транспортном средстве для отображения вычисленных значений усталости.
Система текущего контроля приспособлена для использования, например, датчиков движения для текущего контроля перемещений водителя в транспортном средстве, его/ее поведения при управлении транспортным средством и/или перемещений транспортного средства в его полосе движения. Кроме того, она может быть приспособлена для обнаружения, например, того, производит ли водитель настройку радиоприемника транспортного средства.
На фиг.3 показано то, как , и изменяются в течение приблизительно 36 часов. На чертеже также показано изменение вычисленного значения по шкале KSS. Степень внимательности показывает человека после сна, и что затем его/ее степень внимательности медленно снижается до тех пор, пока он или она не отдохнет снова в 7 часов утра. Циркадный и ультрадианный ритмы были объяснены выше, и шкала KSS представляет собой шкалу (от 1 до 9), которая аппроксимирует относительную усталость человека.
На фиг.4 показано то, как степень усталости подвергается изменениям на протяжении нескольких дней.
Максимальные значения для шкалы KSS обозначены как S1, S2 и S3 в соответствии с тем, когда человек заснул, соответственно, в первый день, во второй день и в третий день.
Таким же самым образом моменты времени, когда человек просыпался, обозначены как W1, W2 и W3.
Пунктирная линия, проходящая через максимумы, показывает повышение максимальной степени усталости человека, которое может указывать, что он или она нуждается в более длительном отдыхе.
На схеме последовательности операций из фиг.5 проиллюстрирован один из вариантов осуществления настоящего изобретения.
Способ начинается с того, что водитель запускает транспортное средство. Время и дату считывают c тахографа, и информацию с карты водителя считывают из устройства ввода данных, передавая ее в блок моделирования внимательности.
Информация с карты водителя указывает, совершал ли водитель другую зарегистрированную поездку или совершал ли тот же самый водитель поездку на том же самом транспортном средстве.
Если водитель совершал другую зарегистрированную поездку на другом транспортном средстве, то производят оценку того, происходила ли она в пределах промежутка времени, установленного инструкцией, до текущей поездки, например, за два или три дня до нее. Если это имеет место, то вычисляют оценочный отрезок времени для отдыха, которых имел водитель, то есть вычисляют параметр . Затем вычисляют текущее и спрогнозированные значения по шкале KSS, информируют водителя о них, и на их основании настраивают систему помощи водителю.
Если информация, считанная с карты водителя, указывает либо отсутствие зарегистрированной поездки, либо то, что отдых был более длительным, чем промежуток времени, установленный инструкцией, то предполагают, что водитель является полностью отдохнувшим, и затем вычисляют текущее и спрогнозированные значения по шкале KSS.
Наконец, если информация, считанная с карты водителя, указывает, что тот же самый водитель управляет тем же самым транспортным средством, степень внимательности

Настоящее изобретение не ограничено описанными выше предпочтительными вариантами его осуществления.
Могут быть использованы различные альтернативные варианты, видоизменения и эквиваленты. Следовательно, описанные выше варианты осуществления изобретения не следует рассматривать как ограничивающие объем патентной охраны изобретения, который определяется прилагаемой формулой изобретения.
Реферат
Генерируют сигнал из тахографа, содержащий информацию о текущем времени и о промежутках времени, когда транспортное средство двигалось. Генерируют сигнал с карты водителя, содержащий информацию о времени работы водителя в рейсе и о времени его отдыха. Вычисляют текущее значение усталости по шкале Karolinska Sleepiness Scale и спрогнозированные значения усталости (по шкале Karolinska Sleepiness Scale) для водителя в течение заданного промежутка времени в будущем с использованием модели внимательности (например, прогнозатора сна/бодрствования) на основании упомянутого сигнала из тахографа и/или сигнала с карты водителя. Упорядочивают вычисленные текущее и спрогнозированные значения усталости для передачи в блок управления для определения управляющих сигналов для системы предупреждения о выезде за пределы полосы движения и системы автоматического экстренного торможения на основании упомянутых значений усталости. Предложено также транспортное средство. Достигается создание усовершенствованной системы обеспечения безопасности для транспортного средства, которую легче использовать, чем существующие системы, и которая обеспечивает учет различных режимов активности и отдыха различных водителей. 2 н. и 22 з.п. ф-лы, 5 ил.
Формула
тахограф (4), который приспособлен для генерации сигнала (6) из тахографа, содержащего информацию о текущем времени по показаниям часов и о промежутках времени, когда транспортное средство двигалось,
блок (8) ввода данных с карты водителя, приспособленный для генерации сигнала (10) с карты водителя, содержащего информацию о времени работы водителя в рейсе и о времени его отдыха,
причем это транспортное средство дополнительно содержит одну или более систем (16) помощи водителю, например, систему предупреждения о выезде за пределы полосы движения и систему автоматического экстренного торможения,
отличающееся тем, что это транспортное средство снабжено системой (18) обеспечения безопасности, содержащей блок (20) управления и блок (22) моделирования внимательности, приспособленный для вычисления текущего значения усталости (по шкале KSS (Каролинская шкала сонливости)) и спрогнозированных значений усталости (по шкале KSS) для водителя в течение заданного промежутка времени в будущем с использованием модели внимательности (например, прогнозатора сна/бодрствования - SWP) на основании упомянутого сигнала (6) из тахографа и/или сигнала (10) с карты водителя, а упомянутые вычисленные текущее и спрогнозированные значения усталости упорядочивают для передачи в упомянутый блок (20) управления, который приспособлен для определения управляющих сигналов (24) для систем (16) помощи водителю транспортного средства на основании упомянутых значений усталости.
,
где обозначает режим сна водителя, обозначает циркадный ритм в течение промежутка времени, равного 24 часам, который характеризует биологический режим сна, а обозначает 12-часовой ультрадианный ритм, основанный на дневной биологической активности водителя.
- по тахографу генерируют сигнал из тахографа, содержащий информацию о текущем времени по показаниям часов и о промежутках времени, когда транспортное средство двигалось,
- из блока ввода данных с карты водителя генерируют сигнал с карты водителя, содержащий информацию о времени работы водителя в рейсе и о времени его отдыха,
причем это транспортное средство дополнительно содержит одну или более систем помощи водителю, например систему предупреждения о выезде за пределы полосы движения и систему автоматического экстренного торможения,
отличающийся тем, что содержит следующую дополнительную операцию:
- в блоке моделирования внимательности, расположенном в системе обеспечения безопасности, вычисляют текущее значение усталости (по шкале KSS) и спрогнозированные значения усталости (по шкале KSS) для водителя в течение заданного промежутка времени в будущем с использованием модели внимательности (например, прогнозатора сна/бодрствования - SWP) на основании упомянутого сигнала из тахографа и/или сигнала с карты водителя,
причем упомянутые вычисленные текущее и спрогнозированные значения усталости упорядочивают для передачи в блок управления, который расположен в упомянутой системе обеспечения безопасности и приспособлен для определения управляющих сигналов для систем помощи водителю транспортного средства на основании упомянутых значений усталости.
,
где обозначает режим сна водителя, обозначает циркадный ритм в течение промежутка времени, равного 24 часам, который характеризует биологический режим сна, а обозначает 12-часовой ультрадианный ритм, основанный на дневной биологической активности водителя.
из системы текущего контроля, предназначенной для текущего контроля действий водителя, генерируют сигнал, характеризующий внимательность, который содержит информацию о действиях водителя в транспортном средстве и приспособлен для передачи в упомянутую систему (18) обеспечения безопасности и подлежит использованию для вычисления текущего и спрогнозированных значений усталости (по шкале KSS) для водителя в течение заданного промежутка времени в будущем.
Комментарии