Устройство для ориентирования при сборке детали типа втулки с боковым отверстием - SU946879A2
Код документа: SU946879A2
Чертежи

Описание
1
Изобретение относится к механосборочному производству, в частности к оборудованию для автоматической подачи деталей типа втулок с боковыми отверстиями в определенном положении , ориентированном по отверстиям .
По основному авт.св. fi 821122 известно устройство для ориентирования при сборке детали типа втулки с боковым отверстием, содержащее смонтированные на основании и связанные с силовым Цилиндром загрузочный глеханизм, механизм перемещения ориентируемой детали, выполненный в виде подвижно установленной на основании по направляющим валикам подпружиненной кондукторной плиты и размещенной в ней по оси силового цилиндра ступенчатой цилиндрической тяги, жестко связанной со штоком этого цилиндра, при этом кондукторная плита имеет симметричные отно сительно тяги гнезда для ориентируемых втулок и ступенчатое отверстие под тягу, механизм фиксации, выполненный в виде жестко связанной с ступенчатой тягой траоерсы и подпружиненных ловителей, закрепленных на концах траверсы и механизм поворота ориентируемой детали, выполненный в виде плиты, установленной на основании- параллельно кондукторной плите с возможностью относительного
10 перемещения, а также размещенных в ней реечной передачи и фрикционных роликов для воздействия на ориентируемые втулки, кинематически связанных между собой, при этом направляю
15 щие валики одними концами жестко закреплены в плите механизма пово рота, а рейка реечной передачи установлена на основании р1.
20
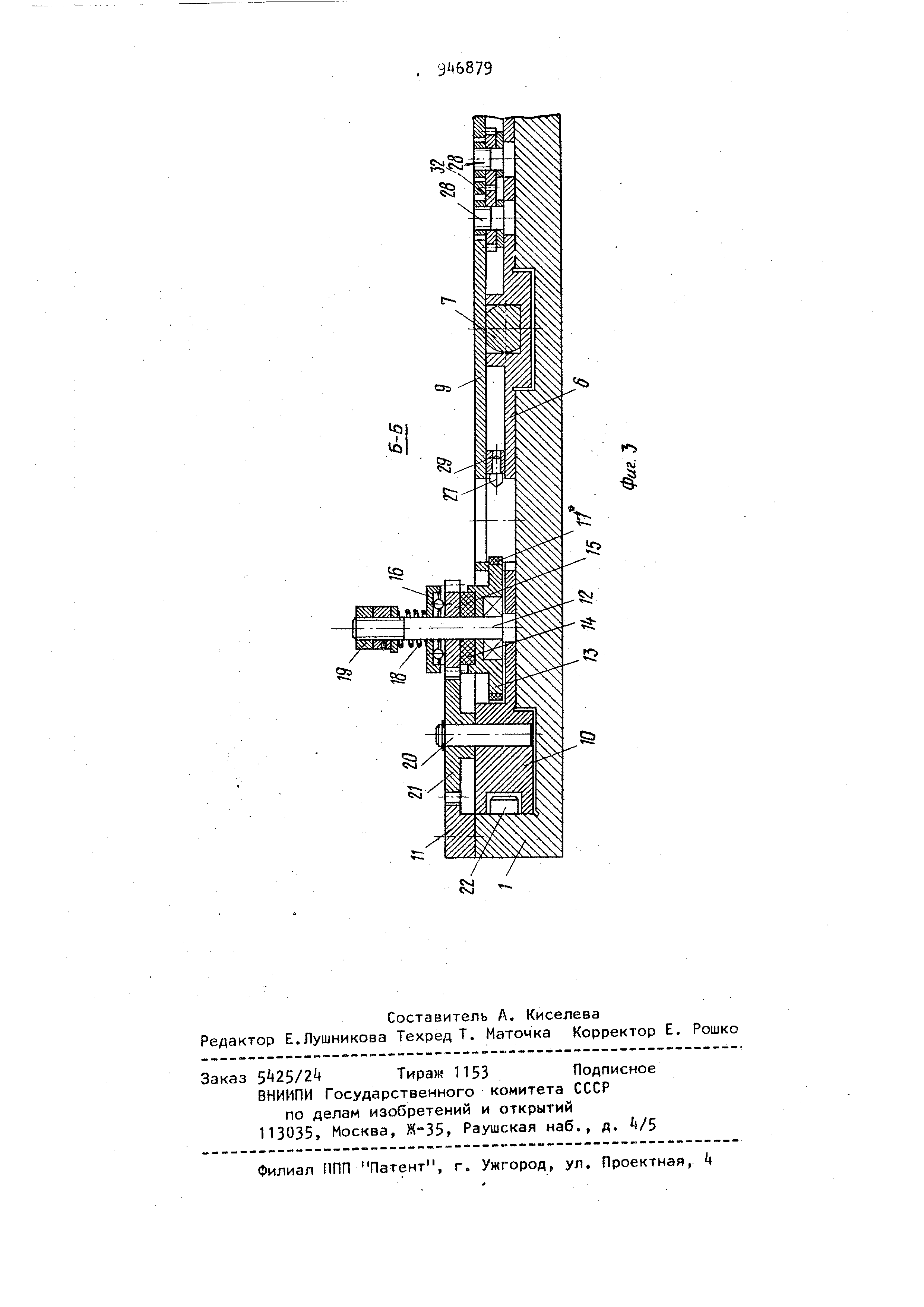
Однако устройство не обеспечивает ориентации при сборке детали типа втулки, имеющей два боковых от-верст .ия. Цель изобретения - обеспечение ориентации при сборке детали типа BTyjiKM с двумя боковыни отверстиями . Указанная цель достигается за счет того, что ycTpovicTBo для ориен тирования при сборке детали типа втулки с боковым отверстием, содержащее смотированные на основании и связанные с силовым цилиндром загрузочный механизм, механизм перемещения ориентируемой детали, выполненный в виде подвижно установленной на основании по направляющим валмкам подпружиненной кондукторной плиты и размещенной в ней по оси силового цилиндра ступенчатой цилиндра ступенчатой цилиндрической тяги, жестко связанной со штоком эт го цилиндра, при этом кондукторная плита имеет симметричные относитель но тяги гнезда для ориентируемых вт лок и ступенчатое отверстие под тяг механизм фиксации, сыполнемный в ви де жестко связанной с ступенчатой тпгой траверсы и подпружиненных ловителей , закрепленных на концах тра нерсы и механизм поворота ориентируемой детал -, выполненный в виде плиты, установленной на основании параллельно кондукторной с возможностью относительного переме щения, а также размещенных в ней реечной передачи и фрикционных роликов для воздействия на ориентируе мые втулки, кинематически связанных между собой, при этом направляющие валики одними концами кестко закреп лены в плите механизма поворота, а рейка реечной передачи установлена на основании, снабжено подпружиненными поворотными одноплечими рычагами и закрепленными на осях поворота рычагов зубчатыми шестернями, ВХОД5ЩИМИ в зацепление одна с друго при этомловители установлены на концах одноплечих рычагов. изображено устройстНа фиг. во, общий вид; на Фиг. 2 - разрез А-А на фиг, 1; на фиг, 3 - разрез Б-Б на фиг.1. Устройство содержит смонтированные на основании 1 и связанные со штоком 2 силового цилиндра загрузоч нь|й механизм, 3) мexaниз перемещения ориентируемой детали, например, втулки k с дЕГумя боковыми отверстия ми, механизм поворота и механизм фи 94 сации . Механизм перемещения выполнен в виде подвижно установленной на основании 1 по направляющим валикам 5 кондукторной плиты 6 и ступенчатой цилиндрической тяги 7, размещенной в кондукторной плите 6 и иестко связанной со штоком 2 .силового цилиндра. Кондукторная плита имеет симметричные относительно тяги 7 гнезда 8 для втулок t и ступенчатое отверстие под тягу 7. На кондукторной плите 6 закреплена пластина 5, которая является отсекателем для втулок 4, находящихся в загрузочном механизме З. Механизм поворота выполнен в виде плиты 10, установленной на основании 1 параллельно кондукторной плите 6 с возможностью относительного перемещения и реечной передачи 11, В плите 10 закреплены оси 12, на которых установлены ролики 13, фрикционные прокладки lit, шестерни 15 и упорные под .шипники 16. Ролики .13 по наружному диаметру имеют фрикционное покрытие 17 для воздействия на ориентируемые втулки k. Пружины 18 через упорные подшипники 1б прижимагат шестерни 15 к фрикционным прокладкам 1, а прокладки прижимаются к верхним торцам роликов 13. При этом усилие прижима регулируется гайками 19 навернутыми на резьбовые части осей 12, В плите 10 закреплены также оси 20, на которых установлены шестерни 21, входящие в зацепление с шестернями 15 и закрепленными на основании 1 рейками реечной передачи 11. В кондукторной плите 6 и плите 10 выполнены пазы в которые входят упоры 22, закрепленные на основании г и служащие для ограничения перемещения плит 6 и 10. Кондукторная плита 6 подпружинена пружинами 23, усилия которых регулируются гайками 2А, навернутыми на резьбовые концы направляющих валиков 5 Механизм фиксации выполнен в виде жестко связанной через скобу 25 со ступенчатой тягой 7 траверсы 26 и ловителей 27. На осях 28 установлены поворотные одноплечие рычаги 29 и 30, подпружиненные пружиной 3. На одних концах рычагов 29 и 30 закреплены ловители 27, а на других концах - шестерни 32, входящие в зацепление одна с другой. Угол между ловителями 27 соответствует углу между осями боковых отверстий в ориентируемых втулках . Ловители
27 имеют возможность выдвигаться в гнезда 8 под действием пружины 31, воздействующей на поворотный рычаг 30, и удалять из гнезда 8 под дейсвием траверсы 2б, связанной с поворотным рычагом 29 коромыслом 33 и штифтами 3 и 35. Суммарная толщина кондукторной плиты 6 и пластины 9 на 0, мм меньше толщины ориентируемой втулки .
В исходном положении шток 2 силового цилиндра отведен в крайнее нижнее положение. Плита 10 механизма поворота стенкой паза упирается в упор 22. Головка тяги 7 упирается в дно ступенчатого отверстия в кондукторной плите 6. Между плитами 6 и 10 имеется некоторый зазор, необходимый для выведения роликов 13 с фрикционным покрытием 17 из гнeз 8. Пружина 31 стремится повернуть ры чаг 30 по часовой стрелке вокруг оси 28. Однако поворота рычага 30 не происходит из-за того, что рычаг 30 через шестерни 32 кинематически связан с рычагом 29, а последний удерживается от поворота тягой 7, связанно с рычагом 29 траверсой 2б, штифтами 3 и 35 и коромыслом 33. Гнезда 8 расположены соосно загрузочному механизму 3- Втулки западают в гнезда 8 до упора в основание 1.
Устройство работает следующим образом .
Шток 2 силового цилиндра сообщает тяге 7 через скобу 25 возвратно-поступательное движение. При движении тяги вверх она освобождает кондукторную плиту 6, которая под действием пружин 23 перемещается по направляющим валикам 5 и прижимается к плите 10 механизг а поворота. При это ролики 13 с фрикционным покрытием 17 прижимаются к боковым поверхностям втулок , находящихся в гнездах 8, причем усилие прижатия определяется степенью сжатия пружин 23 и может регулироваться гайками 2. Затем тяга 7 совершает свободное перемещение до тех пор, пока торец ее головки не упрется в плиту 10. Во время этого перемещения освобождаются поворотные рычаги 29, связанные с тягой 7 через штифты 3 и 35/ коромысло 33 и траверсу 2б. Пружина 31 повооочивает рычаг 30 по часовой стрелке и через шестерни 32 поворачивает рычаг 29 против часовой стрелки, при этом
установленные на рычагах 29 и 30 ловители 27 прижимаются к боковым поверхностям втулок Ц, находящихся в гнездах 8.
При дальнейшем перемещении тяги 7 она своей .головкой толкает впереди себя плиту 10 г4еханизма поворота, которая, перемещалась; по направляющим основания 1, тянет за собой кондукторную плиту 6.
В процессе перемещения плиты 10 шестерни 21, обкатываясь по рейкам, закрепленным на основании 1 реечной передачи 1I, приводятся во вращптельное движение вокруг осей 20 и передают eio шестерням 15, л те в свою очередь, через фрикционные прокладки 1( приводят во вра1цение ролики 13 вокруг осей 12. Ролики 13, будучи
при чатыми к боковым поверхностям ориентируемых втулок , находящихся в гнездах 8, приводят их во вращение , продолкаюцессп до тех пор, пока оси обеих Сюковых отверстий во
втулках не совпадут с осями ловителей 27 и последние на западут в эти отверстия. Ролики 13 после этого останавлипанггел за .счет сил трения на бокових ::v ei;i,4Hc cTflx втулок k и
фрикционного покрятиь / а шестерни 15 продолжают воаьцение, проскальзывая СВОИМ - 7С-рЦГ:М1-1 ПО фрИКЦИОННЫМ
прокладкам I-, . тмеит проска.пьзывания определяется чсилием, создаваемым пружинами 18, Pcздeйcт yюLцими на шестерни 15 через угирные подшипники 1б. Это усилие г .оч;ет регулироваться гайк а м i-1 19
В том слуир:;, если сначала ось только одного бокового отверстия во втулке k совпадает с осью одного из ловителей 27, западания его в это отверстие не происходит, так как вследствие кинематической связи меж
ДУ поворотными рычагами 29 и 30, на которых закреплены ловители 27, поворот их происходить только одновременно, т.е. когда оси обоих отверстий совпадают с осями ловителей 27.
Кондукторная плита 6 с ориентировочными по боковым отерстиям втулками k доходит до позиции, ограниченной упором 22 И , останавливается. В этой позиции со втулками k могут совершаться различные -операции, например , их запрессовка в другие детали (не показаны ). После остановки
кондукторной плиты 6,плита 10,1 под действием тяги 7 перемещается еще на некоторое расстояние, преодолевая усилие пружин 23. Между плитами 6 и 10 образуется зазор, необходимый для того, чтобы вывести ролики 13 из гнезд 8. Ориентированные втулки k удерживаются в гнездах 8 только ловителями 27.
После завершения необходимых операций со втулками 4 и удаления их из гнезд 8, тяга 7 под действием штока 2 начинает движение в обратном направлении.
В начале движения тяги 7 назад она освобождает плиту 10 механизма поворота, которая под действием пружин 23 прижимается к кондукторной плите 6, После этого тяга 7 совершает свободное перемещение до тех пор, пока нижний торец ее головки не упрется в дно ступенчатого отверстия. Совершая это перемещение , тяга 7 через траверсу 2б, штифт 35, коромысло 33 и штифт 3 воздействует на поворотный рычаг и, поворачивает его по часовой стрелке вокруг оси 28, а тот в свою очередь, через .шестерни 32 поворачивает поворотный рычаг 30 против часовой стрелки , отжимая при этом пружину ®1. За счет этих поворотов ловители 27 выходят из гнезда 8. Перемещаясь дальше тяга 7 тянет за собой кондукторную плиту 6, а плита б через пружины 23 тянет плиту 10 механизма поворота Когда стенка паза плиты 10 доходит до упора 22, плита 10 останавливается , а кондукторная плита 6 под действием тяги 7 перемещается еще на некоторое расстояние, преодолевая усилие пружин 23. Между плитами 6 и 10 образуется зазор и ролики 13 выходят из гнезд 8, которые устанавливаются соосно с загрузочным механизмом 3 и втулки i западают в кондукторную плиту 6. Устройство готово для нового цикла.
Устройство обеспечивает повыше-, ние качества сборки при запрессовке детали, например втулки с двумя боковыми отверстиями, за счет того, что запрессовка осуществляется непосредственно в гнезде, где деталь ориентируется.
Формула изобретения
Устройство дЬя ориентирования при сборке детали типа втулки с боковым отверстием по авт.св. № 821122, о т ли чающее ся тем, что, с целью обеспечения ориентации при сборке детали типа втулки с двумя боковыми отверстиями, оно снабжено подпружиненными поворотными одноплечими рычагами и закрепленными на осях поворота рычагов зубчатыми шестернями, входящими в зацепление одна с другой при этом ловители установлены на концах одноплечих рычагов.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР по заявке № 27 3087/25-27, кл. В 23 Р 19/02, 1979.

Реферат
Формула
Комментарии