Ручной садовый секатор - RU2531629C2
Код документа: RU2531629C2
Чертежи

Описание
Изобретение относится к ручному секатору с храповым механизмом.
Секаторы с храповыми механизмами имеют преимущество, что при умеренном усилии руки пользователя они позволяют преодолеть более высокие силы сопротивления срезаемого материала, чем при использовании секаторов с одинаковой длиной ручного рычага, но без храпового механизма. Особенно широко распространен конструктивный вариант, при котором с первым поворотным рычагом, который содержит первую ось секатора и первый ручной рычаг, первым шарниром соединен второй ручной рычаг, а вторым шарниром - вторая рукоятка секатора. Вторая рукоятка секатора содержит вторую щеку секатора и рычажный удлинитель. Рычажный удлинитель через храповой рычаг соединен со вторым ручным рычагом, при этом первый конец храпового рычага установлен с опорой в третьем шарнире, а второй конец храпового рычага опирается на фиксирующую структуру с несколькими ступеньками фиксации. В первом фиксирующем положении, в которое смещается храповой рычаг после положения максимального раздвижения ручных рычагов при смыкании ручных рычагов, щеки секатора сомкнуться полностью не могут. Ручные рычаги после достижения конечного положения первого процесса смыкания ручных рычагов должны вновь раскрыться на некоторую величину, при этом храповой рычаг под действием пружины скачкообразно смещается на одну из следующих фиксирующих ступенек, что в конечном положении процесса смыкания ручного рычага позволяет обеспечить существенное или полное смыкание щек секатора. Из патентной публикации DE 298 16 971 U1 известен секатор с таким храповым механизмом.
Многократные процессы смыкания ручных рычагов с осуществляемым в промежутке частичным раздвижением требуются также, если сопротивление срезаемого материала может быть преодолено также за счет прилагаемого усилия пользователя на ручной рычаг в ходе всего лишь одного процесса смыкания ручных рычагов и следующего за ним прямого реза. В таком случае многофазовый процесс резания посредством храпового механизма представляется излишне трудоемким.
Комфортный секатор с храповым механизмом «Smart cut» (ловкий срез) фирмы GARDENA имеет на второй рукоятке поворотный опорный рычаг, посредством которого, при использовании храпового механизма описанной конструкции, обращенный от второй оси секатора конец рычажного удлинителя второй рукоятки секатора упирается во второй ручной рычаг, при этом отсутствует взаимодействие храпового рычага с фиксирующей структурой с передачей усилия, так что происходит прямой рез с расходом энергии как и в обычных садовых ножницах. Для более объемного реза материала путем отвода опорного рычага может быть подключен храповой механизм, и рез осуществлен за несколько заходов.
Чтобы исключить многократную активацию секатора с храповым механизмом, в патентной публикации США US 6 470 575 В2 предлагается создать на рычажном удлинителе обращенный к второму ручному рычагу управляющий кулачок, который в осуществляемом как прямой рез процессе смыкания ручных рычагов перемещается на расположенных на втором ручном рычаге двух роликах. Однако речь идет здесь лишь о попытке оптимизировать приложение силы в ходе процесса резания при прямом резе. На этом же принципе, но с одним роликом на рычажном удлинителе и управляющим кулачком на втором ручном рычаге, основана публикация MD 3065 F1. Этот секатор не позволяет значительно сократить применение силы в многократном процессе смыкания храпового механизма с большим кумулятивным путем движения ручных рычагов.
Задача предлагаемого изобретения состоит в том, чтобы улучшить пользование садовым секатором с храповым механизмом, в частности сучкорезом.
Изобретение охарактеризовано в независимом пункте формулы изобретения. Зависимые пункты формулы изобретения содержат предпочтительные формы осуществления и варианты усовершенствования изобретения.
Изобретение предоставляет пользователю возможность выбора: либо процесс резания, начатый с использованием занятого вначале фиксирующего положения храпового механизма, при достижении конца начального движения смыкания, соотносящегося с этим начальным фиксирующим положением храпового механизма, продолжить как типичный для храпового секатора многоступенчатый процесс резания, и с этой целью вновь переместить ручные рычаги в направлении раскрытия, либо начатый как резание с храповым механизмом процесс резания проводить в дальнейшем как прямой рез без реверсирования ручных рычагов.
Поэтому пользователь, в зависимости от ситуации в процессе резания, может решить, будет ли он осуществлять начатый процесс резания без использования дальнейших фиксирующих положений как прямой рез или будет использовать функцию храпового механизма. При этом пользователь может спонтанно принять это решение на основе действующего в начальном процессе резания сопротивления срезаемого материала, а не предварительно перед процессом резания. В частности, пользователю не нужно приводить в действие какой-либо особый элемент управления, который осуществляет переключение одного из двух механизмов передачи усилия.
В предпочтительной форме осуществления изобретения, на основе известного и проверенного в плане возможного снижения прилагаемого усилия храпового механизма, посредством происходящего после начального процесса смыкания наложения поверхности прилегания на ответную поверхность прилегания, и с отсоединением функции храпового механизма в результате продолжения процесса смыкания ручных рычагов, создается возможность продолжить процесс резания как непрерывный процесс резания до одного из следующих фиксирующих положений без предварительного раздвижения ручных рычагов или предпочтительно в форме прямого реза до полного смыкания щек секатора и отделения срезаемого материала. При таком продолжении процесса резания без предварительного частичного раздвижения ручных рычагов требуется расход энергии, сравнимый с необходимым в садовом секаторе без храпового механизма.
Начальный процесс резания может быть реализован с относительно небольшим усилием посредством вхождения всякий раз после полного раздвижения при этом ручных рычагов на первую ступеньку фиксации храпового рычага. При наложении поверхности прилегания на ответную поверхность прилегания скачкообразно повышается преодолеваемое пользователем силовое сопротивление. Если при этом расход энергии пользователя для продолжения процесса смыкания оказывается все же слишком высоким, он без особого усилия переходит непосредственно к способу резания с храповым механизмом, раздвигая при этом частично ручные рычаги до тех пор, пока храповой рычаг не сместится на другую ступеньку фиксации.
Предпочтительно, одна из двух поверхностей - поверхность прилегания или ответная поверхность прилегания - может иметь выпуклый изгиб, а другая поверхность - менее изогнутый по сравнению с первой, вогнутый изгиб, вследствие чего на почти точечном соприкосновении обеих поверхностей прилегания может удерживаться незначительное контактное напряжение сжатия.
Поверхность, по меньшей мере, одной из двух прилегающих друг к другу поверхностей прилегания может быть обработана с целью снижения трения, в частности, снабжена снижающим трение покрытием или оболочкой. Геометрии поверхности прилегания и ответной поверхности прилегания могут быть выполнены таким образом, что при возрастающем процессе смыкания передаваемое между обеими поверхностями усилие способствует относительному взаимному смещению обеих поверхностей прилегания.
Особым преимуществом является, если относительное движение между поверхностью прилегания и ответной поверхностью прилегания, которые при продолжении процесса резания обеих ручных рычагов в способе прямого реза налагаются одна на другую во взаимно смещающейся позиции, выполнить как прокатывание одной поверхности по другой. С этой целью поверхность прилегания выполнена предпочтительно, по меньшей мере, на ограниченно проворачивающемся механическом элементе. Предпочтительно, поверхность прилегания от точки вращения выпукло изогнута и предпочтительно выполнена как окружная поверхность установленного с возможностью проворачивания ролика. Ответная поверхность прилегания выполнена в этом случае, от поверхности прилегания и дальше, предпочтительно вогнуто изогнутой, вследствие чего предпочтительно на точке соприкосновения поверхности прилегания и ответной поверхности прилегания может удерживаться низкое контактное напряжение сжатия.
Поверхность прилегания может быть расположена на рычажном удлинителе, а ответная поверхность прилегания на втором ручном рычаге, или наоборот. Фиксирующая структура может быть расположена на рычажном удлинителе или на втором ручном рычаге.
Ниже изобретение детально описано на основе предпочтительных примеров осуществления со ссылкой на чертежи. При этом показаны:
Фиг. 1 - широко раскрытый вначале секатор,
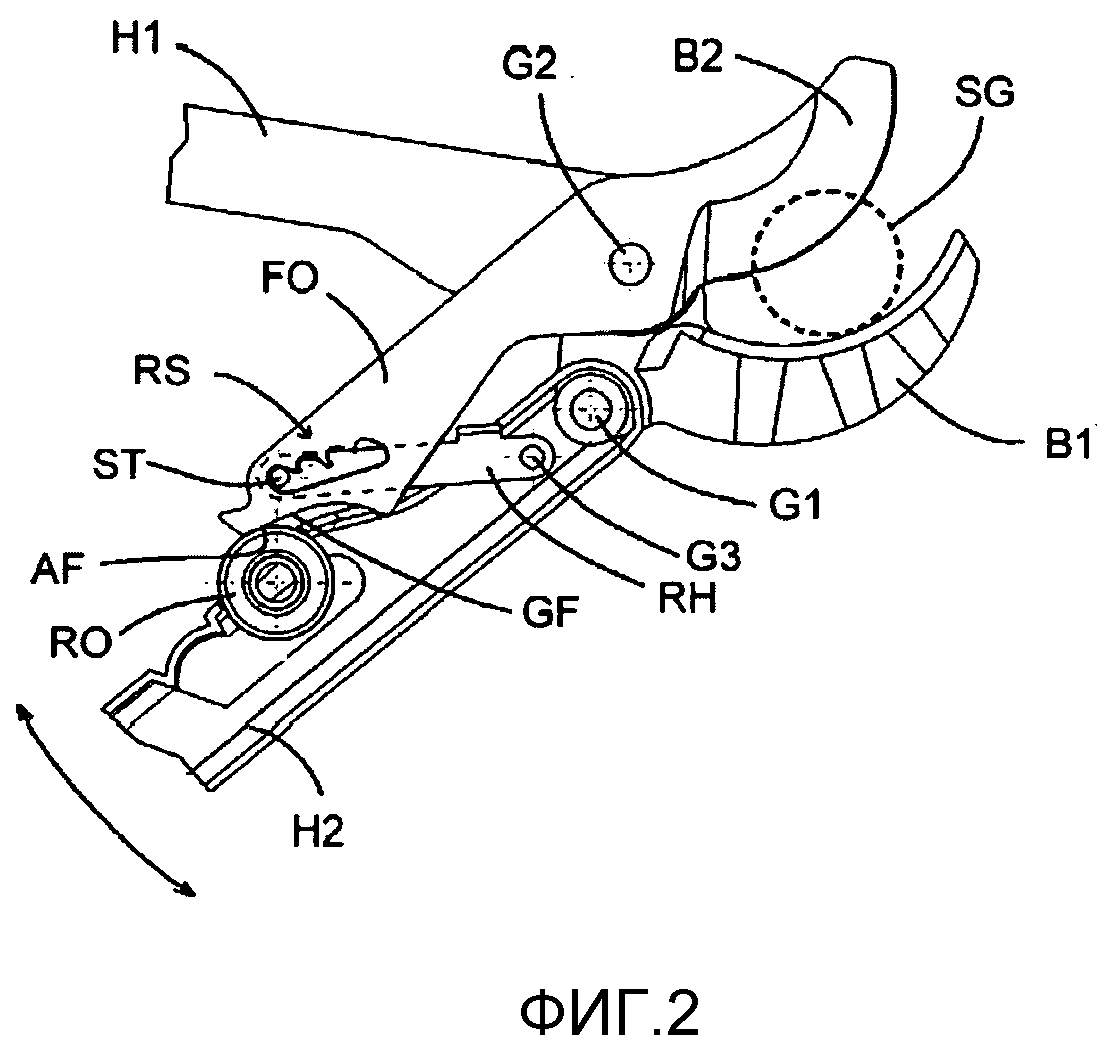
Фиг. 2 - секатор на конце начального процесса смыкания,
Фиг. 3 - секатор на более продвинутой фазе резания.
На фиг. 1 показан секатор в начальном раздвинутом положении на виде сбоку, то есть, если смотреть в осевом направлении шарниров секаторного механизма. Секатор содержит первую рукоятку секатора S1, которая включает первый ручной рычаг Н1 и первую щеку секатора В1. Первая щека секатора В1, в частности, может быть выполнена так же, как наковаленка в секаторе с наковаленкой. На первой рукоятке секатора задана первая шарнирная позиция G1 и вторая шарнирная позиция G2.
Второй ручной рычаг Н2 в первом шарнире на первой шарнирной позиции G1 соединен с первой рукояткой секатора. Вторая рукоятка секатора S2 на второй шарнирной позиции G2 во втором шарнире соединена с первой рукояткой секатора. Вторая рукоятка секатора содержит вторую щеку секатора В2 и с обратной стороны относительного второго шарнира G2 - рычажный удлинитель FO. В третьем шарнире G3 храповой рычаг RH первым концом шарнирно соединен со вторым ручным рычагом Н2. На противоположном, втором конце храпового рычага RH, он посредством запирающего элемента, например штифта, упирается в фиксирующую структуру RS, которая имеет несколько ступенек фиксации R1, R2, R3, R4. Фиксирующая структура в обычном конструктивном исполнении выполнена как проем в образующей вторую рукоятку секатора пластине. Не показанной здесь пружиной, которая может представлять собой, например, пружину растяжения к первому ручному рычагу Н1 или витую изгибную пружину, опертую на втором ручном рычаге Н2, храповой рычаг поджимается в направлении ступенек фиксации фиксирующей структуры, на фиг. 1 в направлении часовой стрелки.
В изображенном на фиг. 1 положении секатора с широким раствором между щеками В1 и В2 на первую ступеньку фиксации R1 фиксирующей структуры как запирающий элемент храпового рычага входит штифт ST. Для передачи силы направленного на смыкание друг к другу обоих ручных рычагов усилия пользователя в усилие резания на срезаемый материал SG между щеками секатора В1 и В2 решающей является геометрия четырехугольника из первого шарнира G1, второго шарнира G2, штифта ST и третьего шарнира G3. На геометрию боковых длин этого четырехугольника может влиять величина передачи силы. Если штифт ST входит на другую ступеньку фиксации, геометрия четырехугольника и, следовательно, величина передачи силы изменяется.
Если ручные рычаги Н1 и Н2 усилием пользователя сдвигаются друг к другу, действующее на второй ручной рычаг Н2 усилие пользователя передается, в частности, посредством нагруженной при этом давлением рукоятки секатора RH на первую канавку фиксирующей структуры и преобразуется в крутящий момент второй рукоятки секатора вокруг второго шарнира G2. При этом срезаемый материал SG опирается на выполненную как наковаленка первую щеку секатора В1, а вторая, заточенная щека секатора В2 врезается в срезаемый материал. Процесс резания может при передаче силы посредством рукоятки секатора RH продолжаться во второй фиксирующей канавке вплоть до показанного на фиг.2 положения, в котором вторая щека секатора В2 вонзается в срезаемый материал SG и при этом отрезает его лишь частично. Рычажный удлинитель FO прилегает в этом положении секатора своей ответной поверхностью GF прилегания к поверхности AF прилегания, которая представлена окружной поверхностью ролика RO, помещенного на втором ручном рычаге Н2 с возможностью проворачивания.
Обычно в известных секаторах с храповым механизмом такой конструкции при наложении ответной поверхности прилегания на рычажном удлинителе FO на поверхность прилегания второго ручного рычага Н2 движение смыкания перемещающихся навстречу друг другу ручных рычагов Н1, Н2 реверсируется, и ручные рычаги вновь удаляются друг от друга, что обозначается как расхождение или направление расхождения ручных рычагов. Если первая щека секатора В1 остается лежать на срезаемом материала, и второй ручной рычаг из показанного на фиг. 2 положения вновь удаляется от первого ручного рычага, то вторая рукоятка секатора S2 остается неподвижной, поскольку вторая щека секатора уже вонзилась в срезаемый материал, и второй конец храпового рычага RH штифтом ST смещается дальше внутрь фиксирующей структуры к следующей или в целом к одной из очередных фиксирующих канавок и под действием силы пружины, которая воздействует на храповой рычаг в направлении вращения по часовой стрелке, входит с зацеплением в ближайшую ко второму шарниру G2 фиксирующую канавку.
При повторном движении обоих ручных рычагов навстречу друг другу под действием усилия пользователя храповой рычаг вновь упирается в ближайшую ко второму шарниру G2 фиксирующую канавку, и вторая щека секатора внедряется дальше в срезаемый материал до тех пор, пока рычажный удлинитель FO своей ответной поверхностью GF прилегания вновь не войдет в соприкосновение с поверхностью AF прилегания ролика RO, или пока срезаемый материал SG полностью не будет отделен, что всегда происходит при опоре храпового рычага посредством штифта ST в ближайшую ко второму шарниру G2 фиксирующую канавку.
Изобретение также предусматривает, что из ситуации с фиг.2 направление движения ручных рычагов не реверсируется в направление расширения, и оба ручных рычага Н1, Н2 продолжают процесс взаимного смыкания ручных рычагов в том же самом направлении движения. При этом передача силы со второго ручного рычага на рычажный удлинитель FO больше не осуществляется посредством храпового рычага RH между третьим шарниром G3 и фиксирующей структурой, а посредством опоры на ролик RO, его поверхности AF прилегания и ответной поверхности GF прилегания на рычажном удлинителе FO. Исходя из этого пути передачи силы, для продолжения процесса смыкания ручных рычагов и, вместе с тем, также для продолжения движения смыкания раствора секатора между обеими щеками секатора FO создана другая геометрия передачи силы, которая по существу соответствует передаче силы в садовом секаторе без храпового механизма. Поэтому прилагаемое пользователем усилие на ручные рычаги Н1, Н2 возрастает скачкообразно. Если пользователь прилагает теперь потребное, более высокое усилие, которое следует считать по существу равным потребному усилию в садовом секаторе без храпового механизма, второй ручной рычаг Н2 и рычажный удлинитель FO второй рукоятки секатора перемещаются равномерно друг другу на первом ручном рычаге и раствор секатора полностью закрыт до отделения срезаемого материала. При этом штифт ST храпового рычага RH движется внутри фиксирующей структуры вдоль нескольких фиксирующих канавок, но не осуществляя при этом функцию в рамках храпового механизма и, в частности, не передавая усилие пользователя на рукоятки секатора.
На фиг. 3 показан секатор в более продвинутом положении смыкания, при этом он преодолевает зуб, отделяющий предпоследнюю ступеньку фиксации R3 от последней ступеньки фиксации R4.
Если пользователь в ситуации на фиг. 2 хочет продолжить процесс смыкания как прямой рез, но обнаруживает, что не может приложить потребное для этого усилие, он может, не приводя в действие никакой механический элемент, просто обычным для храпового механизма способом вновь развести друг от друга оба ручных рычага до тех пор, пока штифт ST храпового рычага не войдет в одну из очередных фиксирующих канавок, а затем продолжить процесс резания с меньшим, чем для прямого реза усилием, при необходимости, также на нескольких других ступеньках. Пользователь может также вначале проделать путь больше одной ступеньки в многоступенчатом процессе резания с храповым механизмом, включающий движение раздвигания между двумя движениями смыкания, как рез с использованием храпового механизма, и лишь затем перейти к прямому резу.
О секаторах с храповым механизмом известно, что фиксирующая структура может быть выполнена также на обеих сторонах второго ручного рычага, а рычаг-фиксатор в неподвижном положении соединен с рычажным удлинителем FO в третьем шарнире и запирающим элементом, например штифтом ST, входить в фиксирующую структуру на ручном рычаге Н2.
Поверхность AF прилегания и ответная поверхность GF прилегания могут быть выполнены также с взаимной заменой таким образом, что поверхность FO прилегания и ответная поверхность GF прилегания расположены на обеих сторонах ручного рычага и с этой целью на рычажном удлинителе FO закреплен с возможностью проворачивания ролик RO или другой, по меньшей мере ограниченно проворачивающийся элемент, несущий поверхность AF прилегания.
Поверхность прилегания, которая прокатывается по ответной поверхности прилегания при продолжении процесса резания в виде прямого реза, также может быть выполнена лишь с ограниченной угловой зоной вокруг точки вращения проворачивающегося упорного элемента и также может отклоняться в точке вращения от формы точной дуги окружности. Ограниченно проворачивающийся упорный элемент поджимается предпочтительно пружиной в определенное выходное положение.
Приведенные в описании и в пунктах формулы изобретения, а также вытекающие из графического материала признаки могут быть с преимуществом реализованы как каждый в отдельности, так и в различной комбинации. Изобретение не ограничивается описанными примерами осуществления и в рамках профессионального знания может быть изменено в различных аспектах.
Реферат
Секатор содержит храповой механизм, который обеспечивает процесс резания в виде процесса смыкания двух вначале раздвинутых щек секатора путем движения двух ручных рычагов в несколько этапов с поочередным движением смыкания и движением разведения ручных рычагов. Секатор имеет средства для альтернативного осуществления полного процесса резания как прямого реза лишь движением смыкания ручных рычагов. На первой рукоятке секатора выполнена первая щека секатора и первый ручной рычаг. Второй ручной рычаг соединен в первом шарнире с первой рукояткой секатора. Вторая рукоятка секатора соединена во втором шарнире с первой рукояткой секатора. На втором рычаге секатора выполнена вторая щека секатора, а на обращенной от нее стороне относительного второго шарнира образован расположенный между первым и вторым ручным рычагом рычажный удлинитель. Рычажный удлинитель и второй ручной рычаг соединены посредством храпового рычага. Храповой рычаг первым концом в третьем шарнире и вторым концом в многоступенчатой фиксирующей структуре соединен со вторым ручным рычагом или соответственно рычажным удлинителем и под действием пружины может перемещаться между различными положениями фиксации с зацеплением на различных ступеньках фиксации вокруг третьего шарнира. Разные ступеньки фиксации соответствуют разным максимальным и минимальным величинам раздвижения ручных рычагов и щек секатора. При максимальной величине раздвижения ручных рычагов храповой рычаг входит в фиксирующую структуру на первую ступеньку фиксации, на которой щеки секатора смыкаются не полностью. В положении храпового рычага на первой ступеньке фи
Формула
- на первой рукоятке секатора выполнена первая щека секатора и первый ручной рычаг,
- второй ручной рычаг соединен в первом шарнире с первой рукояткой секатора,
- вторая рукоятка секатора соединена во втором шарнире с первой рукояткой секатора,
- на втором рычаге секатора выполнена вторая щека секатора, а на обращенной от нее стороне относительного второго шарнира образован расположенный между первым и вторым ручным рычагом рычажный удлинитель,
- рычажный удлинитель и второй ручной рычаг соединены посредством храпового рычага,
- храповой рычаг первым концом в третьем шарнире и вторым концом в многоступенчатой фиксирующей структуре соединен со вторым ручным рычагом или соответственно рычажным удлинителем и под действием пружины может перемещаться между различными положениями фиксации с зацеплением на различных ступеньках фиксации вокруг третьего шарнира,
- разные ступеньки фиксации соответствуют разным максимальным и минимальным величинам раздвижения ручных рычагов и щек секатора,
- при максимальной величине раздвижения ручных рычагов храповой рычаг входит в фиксирующую структуру на первую ступеньку фиксации, на которой щеки секатора смыкаются не полностью,
- в положении храпового рычага на первой ступеньке фиксации смыкание ручных рычагов вызывает наложение поверхности прилегания рычажного удлинителя на ответную поверхность прилегания на втором ручном рычаге,
- продолжение под действием усилия пользователя движения смыкания приводит к выходу второго конца храпового рычага из занятой прежде ступеньки фиксации,
- при продолжении движения смыкания ручных рычагов поверхность прилегания и ответная поверхность прилегания передают усилие пользователя на вторую рукоятку секатора.
Комментарии