Способ миоэлектрического управления искусственной конечностью (варианты) - RU2108768C1
Код документа: RU2108768C1
Чертежи
Описание
Изобретение относится к способу миоэлектрического пропорционального управления приводимой от электродвигателя искусственной конечностью, в частности протезом кисти, при котором измеряется и направляется в систему управления напряжение соответствующего электродного сигнала.
Патент ФРГ N 1808934 B2 раскрывает миоэлектрическую схему управления для пропорционально управляемых, приводимых в действие от электродвигателя искусственных конечностей, в частности протезов кисти, в которой приводной двигатель искусственной конечности на время ее функционирования импульсно соединяется с источником тока. Постоянное напряжение, пропорциональное мионапряжению, накладывается на пилообразное напряжение постоянной амплитуды импульса и частоты повторения импульсов, причем составляющие этого суммарного напряжения, превышающие постоянное пороговое значение, вызывают в каждом случае подключение приводного двигателя к источнику тока.
Патент ФРГ N 2236969 B2 раскрывает схему торможения двигателя для миоэлектрической, модулированной по длительности схемы управления, пропорциональной управляемой, приводимой в действие от электродвигателя искусственной конечности, в частности протеза кисти, где мионапряжение усиливается, выпрямляется, интегрируется и накладывается на пилообразное импульсное напряжение постоянной частоты повторения импульсов и постоянной амплитуды импульсов. Наложенное напряжение прикладывается к входу генератора прямоугольных импульсов для управления скважностью прямоугольных импульсов генератора в зависимости от амплитуды снимаемого мионапряжения. Прямоугольные импульсы генератора используются для управления блоком коммутации, через который приводной двигатель импульсно подключается к источнику тока. Модулированные по длительности прямоугольные импульсы генератора через усилитель подаются в интегрирующее звено, выходное напряжение которого пропорционально среднему значению скважности прямоугольных импульсов генератора, которые дифференцируются в следующем дифференцирующем звене и управляют еще одним выключателем блока коммутации, импульсно закорачивающим якорную обмотку приводного двигателя. Этот выключатель срабатывает только по сигналам одной полярности с соответствующим пороговым значением и может быть образован смещенным транзистором.
Патент ФРГ N 2354885 A раскрывает миоэлектрическую схему управления для модулированных по длительности, пропорционально управляемых, приводимых в действие от электродвигателя искусственных конечностей, в частности протезов кисти, где мионапряжение усиливается, выпрямляется и накладывается на пилообразное напряжение постоянной частоты. Суммарное напряжение подводится к входу импульсного генератора, выполненного, например, в виде триггера Шмитта, с целью варьирования скважности импульсов генератора в зависимости от величины снимаемого мионапряжения. Импульсы генератора используются для управления блоком коммутации, через который приводной двигатель импульсно подключается к источнику тока. В этой схеме напряжение, пропорциональное току приводного двигателя, подается на вход импульсного генератора и/или напряжение, пропорциональное напряжению двигателя, подается в импульсный генератор как напряжение смещения. Между блоком коммутации и двигателем последовательно включен измерительный резистор, обе клеммы которого подсоединены к входам дифференциального усилителя, выход которого соединен с входом импульсного генератора.
Схемы управления захватывающим усилием и скоростью электромеханических протезов кисти, квазипропорциональные сигналу ЭМГ (электромиограммы), таким образом известны. Способом, наиболее часто применяемым для регулирования числа оборотов двигателей постоянного тока, является способ широтное импульсной модуляции (ШИМ). При этом в электродвигатель подается периодическое постоянное напряжение, частота которого находится выше диапазона звуковых частот в пределах от 18 до 40 кГц. В зависимости от величины сигнала ЭМГ в электродвигатель подводятся эквивалентные по длительности импульсы напряжения, которые за счет механической инерции якоря электродвигателя интегрируются в среднее значение напряжения. При этом уже предлагалось закорачивать двигатель в интервалах между импульсами для лучшего интегрирования числа оборотов. Однако в результате этого увеличивается потребление тока во всей системе.
С помощью известных систем управления невозможно достичь действительно удовлетворительного регулирования в направлении открытия или закрытия, а также в создании усилия, поскольку, с одной стороны, воздействующие извне упругие моменты за счет внутренней кисти и пластиковых покрытий затрудняют линейное регулирование скорости и поскольку, с другой стороны, даже использование автоматической передачи не позволяет оптимально регулировать создание захватывающего усилия.
В основу изобретения положена задача усовершенствовать вышеуказанный способ.
Для пропорционального регулирования скорости эта задача решается согласно изобретению следующими признаками.
При осуществлении пропорционального регулирования скорости из различных заданных значений числа оборотов, касающихся приводного двигателя и определяемых в каждом соответствующем случае определенным электродным напряжением, выявляется заданное значение числа оборотов, согласующееся с измеренным электродным напряжением. Это заданное значение числа оборотов сравнивается с фактическим числом оборотов двигателя и в виде рассогласования подается в пропорционально-интегральный регулятор (ПИ-регулятор). В ПИ-регуляторе отклонение регулируемой величины в соответствии с установленными параметрами преобразуется в сигнал широтно-импульсной модуляции (сигнал ШИМ), оказывающий управляющее воздействие на приводной двигатель, который в результате этого приобретает число оборотов, пропорциональное электродному напряжению. Измеряется соответствующая фактическая величина тока приводного двигателя и сравнивается с заданным максимумом тока, при превышении которого ПИ-регулятор отключается.
Указанная задача для пропорционального регулирования захватывающего усилия решается согласно изобретению следующими признаками.
При осуществлении пропорционального регулирования захватывающего усилия создание этого усилия происходит поэтапно. Максимальное захватывающее усилие подразделяется на ступени, причем фактическое электродное напряжение соответствует определенному числу ступеней. С каждой ступенью согласуются определенное значение широтно-импульсной модуляции (значение ШИМ) и соответствующее значение отключения тока. Счетчиком производится отсчет в сторону увеличения от показания "0" до числа ступеней, заданного фактическим электродным напряжением, причем выбираемое счетчиком значение ШИМ выдается с эквивалентным ему значением отключения тока. Параллельно с этим измеряется ток приводного двигателя и сравнивается с выдаваемым значением отключения тока. При достижении этого значения отключения счетчик повышается на 1 и выдается следующее значение ШИМ. При достижении счетчиком числа ступеней, заданного фактическим электродным напряжением, заданное захватывающее усилие достигнуто и приводной двигатель отключается. Измеряется соответствующая фактическая величина тока приводного двигателя и сравнивается с заданным максимумом тока, при превышении которого приводной двигатель также отключается.
Таким образом, согласно изобретению, возможно как пропорциональное сигналу ЭМГ регулирование скорости, так и регулирование захватывающего усилия.
Согласно изобретению, рационально объединить оба вида регулирования в одну систему, работающую следующим образом.
Два электродных сигнала измеряются, усредняются и подаются в блокирующее устройство, которое сравнивает сигналы с внутренне установленными порогами переключения и освобождает соответствующее направление двигателя. Механический выключатель захватывающего усилия, точка переключения которого лежит над точкой переключения автоматической передачи, разделяет систему на два контура регулирования. Если точка переключения не достигается, система работает в режиме пропорционального регулирования скорости. При превышении указанной точки происходит переключение на пропорциональное регулирование захватывающего усилия.
Другие признаки изобретения являются предметом зависимых пунктов формулы и в связи с прочими преимуществами изобретения более подробно поясняются на примерах выполнения.
На фиг. 1 дана блок-схема функционирования предложенной системы пропорционального регулирования скорости и пропорционального регулирования захватывающего усилия; на фиг. 2 контур режима пропорционального регулирования скорости; на фиг. 3 - контур режима пропорционального регулирования захватывающего усилия; на фиг. 4 - процесс формирования ШИМ с использованием таймера-прерывателя.
Согласно фиг. 1 два электродных сигнала измеряются, усредняются и подаются в блокирующее устройство, которое сравнивает сигналы с внутренне установленными порогами переключения и освобождает соответствующее направление двигателя. Механический выключатель захватывающего усилия, точка переключения которого лежит над точкой переключения автоматической передачи, разделяет систему на два контура регулирования. Если точка переключения не достигается, то система работает в режиме пропорционального регулирования скорости (фиг. 2), при превышении указанной точки происходит переключение на пропорциональное регулирование захватывающего усилия (фиг. 3).
При пропорциональном регулировании скорости выключатель захватывающего усилия открыт, согласно фиг. 1, предпочтительное электродное напряжение посредством таблицы преобразуется в заданное значение числа оборотов. Соответствующее табличное значение представляет собой заданное значение (заданное число оборотов) для последующего ПИ-регулятора. Такой вид табличного преобразования позволяет осуществлять согласование с определенной характеристикой числа оборотов по электродному сигналу (пропорциональность). При этом использование таблицы дает большое преимущество в том, что небольшие помехи входного сигнала благодаря преобразованию табличными значениями просто гасятся (фильтрация) и одновременно могут формироваться индивидуальные характеристики.
Появившееся заданное значение сравнивается с измеренным фактическим числом оборотов двигателя и в виде рассогласования подается в ПИ-регулятор. Число оборотов двигателя измеряется в интервале ШИМ как генераторное напряжение обратной связи. В ПИ-регуляторе отклонение регулируемой величины в соответствии с установленными параметрами преобразуется в сигнал ШИМ, оказывающий управляющее воздействие на мост электродвигателя.
Контур регулирования в результате этого замыкается. Двигатель вращается теперь с числом оборотов, пропорциональным фактическому электродному напряжению.
В наложенном контуре управления измеренная фактическая величина тока двигателя сравнивается с максимумом тока. При его превышении (кисть движется в направлении открытия до упора) ПИ-регулятор и вместе с ним мост двигателя отключаются.
Если же выключатель захватывающего усилия срабатывает в результате превышения установленного захватывающего усилия, происходит переключение на пропорциональное регулирование захватывающего усилия. Создание захватывающего усилия осуществляется поэтапно, причем максимальное захватывающее усилие подразделяется на ступени. При этом фактическое электродное напряжение соответствует определенному числу ступеней. Внутрипрограммный счетчик начинает отсчет по двум таблицам (значение ШИМ и соответствующее значение отключения тока) в сторону увеличения от показания "0" до числа ступеней, заданного фактическим электродным напряжением. Происходит выдача выбранного счетчиком значения ШИМ. Параллельно с этим измеряется ток двигателя и сравнивается со значением отключения тока, эквивалентным значению ШИМ. При достижении упомянутого значения отключения счетчик повышается на 1 и выдается следующее значение ШИМ.
Непрерывная выдача возрастающих значений ШИМ и значений отключения тока соответствует пропорциональному созданию захватывающего усилия.
При достижении счетчиком числа ступеней, заданного электродом, достигается заданное захватывающее усилие, двигатель отключается. Амплитуда электродного напряжения запоминается и устанавливается в качестве порога переключения для возможного дополнительного захватывания кистью. Для этого необходимо соответственно сильнее напрячь мышцу, чтобы выйти за этот порог переключения.
Для обеспечения возможности быстрого выхода на максимальное захватывающее усилие при превышении электродным напряжением заданного порога переключения показание счетчика устанавливается не на "0", а на более высокое табличное значение. Этим за более короткое время достигается максимальное захватывающее усилие и двигатель отключается.
Если при создании захватывающего усилия кисти фактическая величина тока двигателя превышает некоторое внутренне установленное максимальное значение тока, двигатель также отключается.
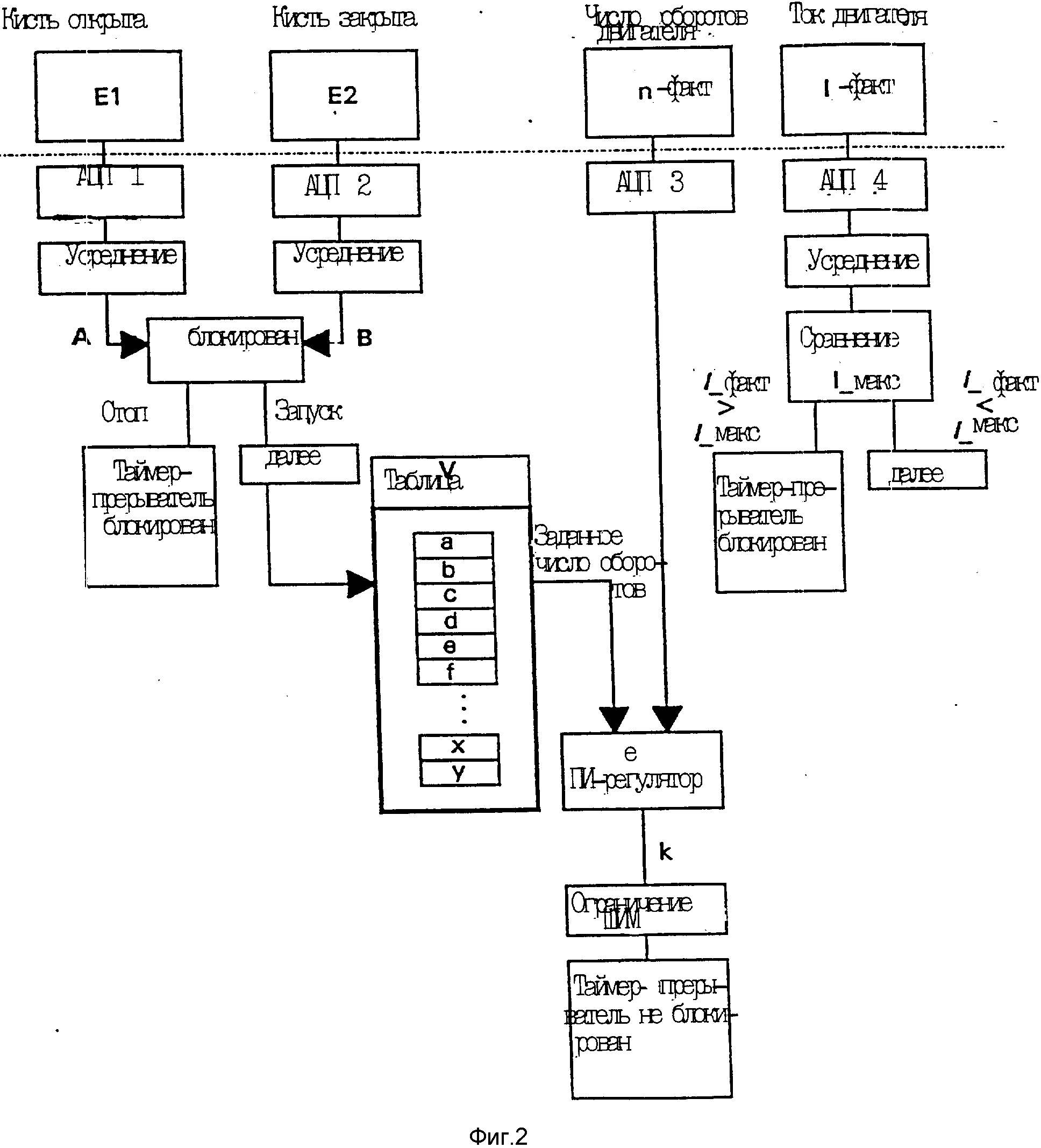
Пояснения к фиг.2.
Два электрических сигнала (миосигнала), вызывающие активность мышц, снимаются через накожные электроды, усиливаются, фильтруются, выпрямляются и в виде сигналов E1 и E2 поступают в схему.
Через АЦП1 и АЦП2 осуществляется аналого-цифровое преобразование (8 битов).
Значения поступают через усреднение в блокирующее устройство блокировку).
Усреднение.
Задача: образование средних значений и увеличение диапазона, когда деление производится только на половину числа суммированных значений.
Проведение: 128 измеренных величин / 64 = цифровое значение.
Блокировка.
Задача: выбор активного сигнала, блокирование неактивного сигнала.
Проведение:
Состояние покоя. A и B неактивны, ожидание перехода одного
из них через порог включения. Пороги включения для обоих направлений (кисть открыта/кисть закрыта) различны, кисть открыта - существует фиксированно заданный порог включения Uвкл-откр., кисть закрыта
- существует переменный порог включения Uвкл-закр, значение которого подвержено влиянию режима работы, пропорционального току (электродинамической силе).
Активное состояние. Если один из обоих сигналов перешел через порог включения, он считается активным сигналом до тех пор, пока не попадет под фиксированно заданный порог выключения Uвыкл. и пока снова не наступит состояние покоя. В "активное" время неактивный сигнал блокирован.
Если A и B неактивны (состояние покоя), через разветвление "Стоп" таймер-прерыватель блокируется, т. е. подавляется формирование ШИМ.
При активности одного из обоих сигналов используется в качестве индикатора таблица (V-таблица), которая по каждому значению сигнала содержит заданное значение числа оборотов двигателя.
Это заданное значение числа оборотов является входной величиной для ПИ-регулятора.
ПИ-регулятор.
Формируется разность из преобразованного через АЦПЗ фактического числа оборотов (двигателя) и заданного числа оборотов (c).
Пропорциональная составляющая: P e*v (v - пропорциональное усиление). Интегральная составляющая: I


Ограничение ШИМ. Для обеспечения безотказного регулирования предусматривается обусловленное системой ограничение на выходе регулятора (значение "k") сверху и снизу.
Таймер-прерыватель не блокирован. А или В является активным и образовано значение скважности ШИМ ("k"). Теперь таймер-прерыватель может быть деблокирован.
Ток двигателя. Подвергается аналого-цифровому преобразованию через АЦП4 и сглаживается путем усреднения до 1/4. Ток двигателя постоянно проверяется на обусловленную системой постоянную по току Iмакс. При превышении током двигателя этого значения таймер-прерыватель блокируется.
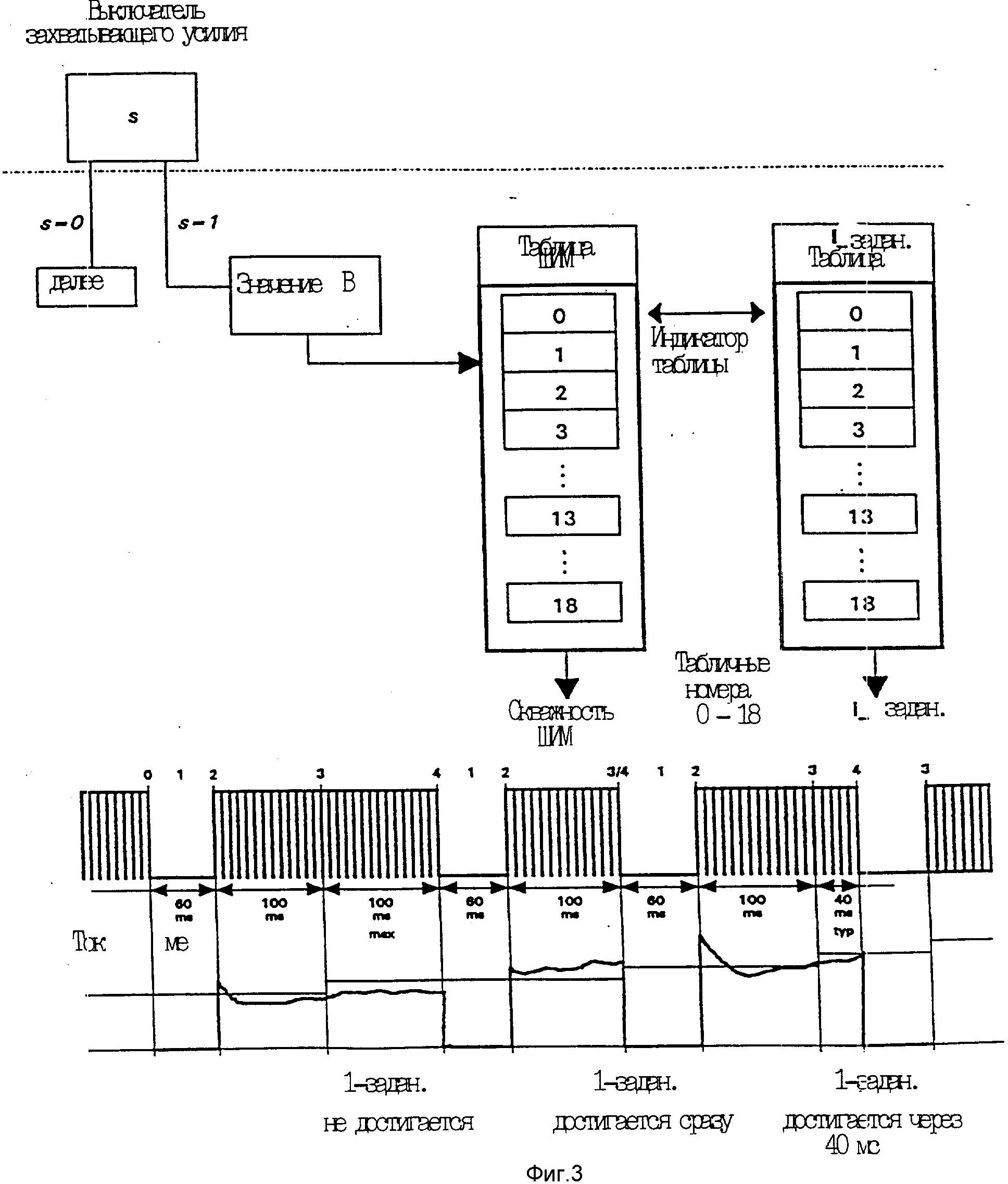
Пояснения к фиг. 3.
Переключение в этот режим работы производится выключателем (выключателем захватывающего усилия), который за счет своего конструктивного выполнения сигнализирует о захватывании, начиная с некоторого силового порога (s = 1).
Ход процесса в этом состоянии должен создать пропорциональность между электродным сигналом и захватывающим усилием.
Значение B. Поскольку усилие создается только при закрывании кисти, в качестве исходного для всего процесса берется сигнал B (кисть закрыта).
Описание отдельных моментов работы и текущих значений.
0... Выключатель захватывающего усилия закрыт (s = 1).
1... Пауза 60 мс (фиксированная).
2... Берется первое значение из таблицы ШИМ и выдается на 100 мс.
3.1. . . Измеряется ток Iфакт, и сравнивается с Iзадан (из таблицы для I задан.):
а) Iфакт > Iзадан., таймер-прерыватель блокирован;
б) Iфакт < Iзадан., измеряется
Iфакт максимально еще для 100 мс. Если за это время не наступит положение, описанное в пункте "a", по истечении указанных 100 мс таймер-прерыватель блокируется.
3.2. . . Независимо от Iзадан производится непрерывное сравнение Iфакт с Iмакс. При превышении Iмакс происходит отключение (таймер- прерыватель блокируется) для предотвращения "дополнительной накачки". Деблокируется это состояние только путем возбуждения сигнала A (кисть открыта).
4. . . Индикатор таблицы получает приращение. (Значения в обеих таблицах пронумерованы от 0 до 18.) Если индикатор таблицы и B указывают на тот же номер по таблице, желаемое захватывающее усилие достигнуто и таймер-прерыватель может быть заблокирован. Если это состояние еще не достигнуто, процесс продолжается в точке A. При достижении этого состояния B запоминается в памяти и используется в качестве нового порога включения при блокировке. В результате кисть остается в этом состоянии (состоянии захватывания) и может быть выведена из этого положения лишь путем возбуждения A (кисть открыта) для уменьшения захватывающего усилия или же возбуждения B (кисть закрыта) с таким значением B, которое должно превышать последнее запомненное значение (новый порог включения), для увеличения захватывающего усилия.
Если электродный сигнал В превышает 1.2 в (соответствует табличному номеру > 18), что вызвано сильным сокращением мышц (соответствует желанию быстрого и сильного захватывания), то индикатор таблицы, не поднимаясь последовательно к соответствующему значению, сразу устанавливается на табличный номер 13.
Это имеет место лишь тогда, когда к моменту возбуждения индикатор таблицы находится под табличным номером 13.
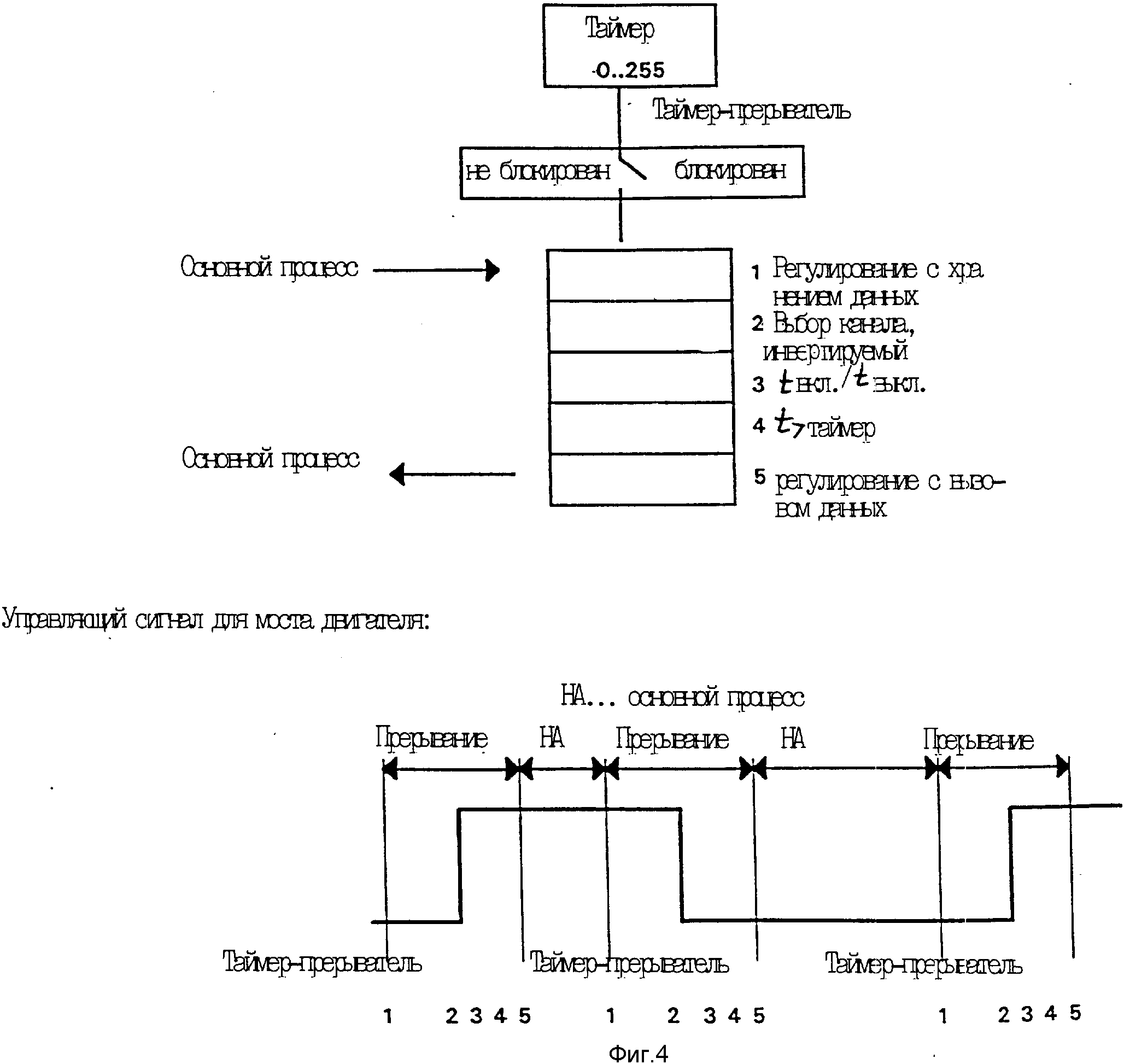
Пояснения к фиг. 4.
Когда выполнены условия, необходимые для деблокирования таймера- прерывателя, этот таймер (8 битов) при переходе от 255 к 0 вызывает прерывание, после чего осуществляется переход таймера к программе, служащей для формирования ШИМ.
Регулирование и хранение данных [1]:
поскольку основная программа прерывается в
неопределенном месте (только в зависимости от обработки таймера), необходимо значения, находящиеся в работе, накапливать в памяти.
Выбор канала/инвертируемый [2]:
выясняют,
какой из обоих входов A или B является активным, чтобы установить фактическое направление вращения двигателя. Затем проводят инвертирование ранее выданного сигнала двигателя.
tвкл/tвыкл [3]:
устанавливают, имеет ли место при образовании ШИМ состояние "Двигатель включен" или "Двигатель выключен". Соответственно из "k" формируется значение
продолжительности включения (tвкл) или продолжительности выключения (tвыкл).
t > таймер [4] :
вычисленное в точке 3 текущее значение вводится в
таймер и последний запускается. Это дает в итоге саму скважность.
Регулирование с вызовом данных [5] :
запомненные вначале значения снова включаются в работу и основной
процесс продолжается.
Реферат
Изобретение относится к способу миоэлектрического пропорционального управления приводимой от электродвигателя искусственной конечностью, в частности протезом кисти. Технический результат состоит в создании оптимальных условий регулирования скорости и захватывающего усилия. Это достигается тем, что при пропорциональном регулировании скорости из различных заданных значений числа оборотов приводного двигателя, определяемых для каждого соответствующим электродным напряжением, выявляется заданное значение числа оборотов, согласующееся с измеренным электродным напряжением. Это заданное значение числа оборотов сравнивается с фактическим числом оборотов двигателя и в виде рассогласования подается в пропорционально-интегральный регулятор (ПИ-регулятор). В ПИ-регуляторе отклонение регулируемой величины в соответствии с установленными параметрами преобразуется в сигнал широтно-импульсной модуляции (ШИМ), оказывающий управляющее воздействие на приводной двигатель. В результате этого он приобретает число оборотов, пропорциональное электронному напряжению. Измеряется соответствующая фактическая величина тока приводного двигателя и сравнивается с заданным максимум тока, при превышении которого ПИ-регулятор отключается. При пропорциональном регулировании захватывающего усилия создание этого усилия происходит поэтапно. Максимальное захватывающее усилие подразделяется на ступени, причем фактическое электродное напряжение соответствует определенному числу ступеней. С каждой ступенью согласуются определенное значение широтно-импульсной модуляции (значение ШИМ) и соответствующее значение отключения тока. Счетчиком производится отсчет в сторону увеличения от показания "0" до числа ступеней, заданного фактическим электродным напряжением, причем выбираемое счетчиком значение ШИМ выдается с эквивалентным ему значением отключения тока. Параллельно с этим измеряется ток приводного двигателя и сравнивается с выданным значением отключения тока. При достижении этого значения отключения счетчик повышается на 1 и выдается следующее значение ШИМ. При достижении счетчиком числа ступеней, заданного фактическим электродным напряжением, заданное захватывающее усилие достигнуто и приводной двигатель отключается. Измеряется соответствующая фактическая величина тока приводного двигателя и сравнивается с заданным максимумом тока, при превышении которого приводной двигатель также отключается. 3 с. и 2 з.п.ф-лы, 4 ил.

Комментарии