Шарнирное соединение протеза нижней конечности - RU2050155C1
Код документа: RU2050155C1
Чертежи









Описание
Изобретение касается шарнирного соединения протеза нижней конечности, представляющего собой плоскую кинематическую цепь в виде элементов, соединенных шарнирами и предназначенных для соединения гильзы бедра со стойкой голени.
Известно шарнирное соединение, предназначенное для соединения по меньшей мере частей в форме кинематической цепи, представляющее собой многоцентровое шарнирное соединение элементов с линейным и поворотным движением. При этом кинематическая шарнирная цепь состоит из четырех шарнирных элементов: шарнир бедра, соединенный с остовом; шарнир голени, жестко соединенный с протезом голени, а также шарнирно соединяющий обе суставные части, направляющий передний элемент сочлененный и задний направляющий элемент сочленения. Эти четыре шарнирных элемента соединяющие по два имеют фиксированные по месту оси, так что расстояние между шарнирами соответственно постоянно. Имеется также упор, ограничивающий перемещение одного из шарниров назад.
Известен протез после вычленения бедра, состоящий из двух частей: тазобедренного шарнира и каркаса ноги, причем протез содержит тройник, коромысло с опорной площадкой, шарнирно соединенное задними трубками бедра с коленным шарниром. Однако в этих устройствах каждый шарнирный элемент традиционно выполнен неподвижным. Кроме того, под влиянием внешних сил ни один шарнирный элемент не может стать короче по своей длине или соответственно ни одна точка шарнира не может смещаться в каком-либо направлении.
Цель изобретения расширения функции полицентрического шарнирного соединения протеза нижней конечности.
Для этого смещение хотя бы одного из элементов кинематической шарнирной цепи ограничено по меньшей мере в одном направлении, а длина по меньшей мере одного элемента изменяется в зависимости от воздействия внешнего усилия.
В шарнирное соединение протеза нижней конечности введены регулируемые упоры, установленные на элементах кинематической цепи, и пружина, установленная на одном из элементов с возможностью изменения длины этого элемента, причем один из упоров выполнен регулируемым и расположен между двумя жесткими шарнирными элементами.
Также является предпочтительным, когда подпружиненный элемент одним из своих концов установлен в прорези с возможностью перемещения между двумя конечными упорами и фиксации в ней.
Кроме того, введенный в шарнирное соединение дополнительный упор установлен с возможностью фиксации длины подпружиненного элемента. При этом пружина установлена с возможностью регулирования предварительного натяжения, а продольная прорезь шарнирного соединения образует части дуги с центром в верхней шарнирной точке.
На фиг. 1 изображено известное многоцентровое шарнирное соединение; на фиг. 2 предложенное многоцентровое шарнирное соединение; на фиг.3 пример выполнения многоцентрового шарнирного соединения; на фиг.4 то же, вариант выполнения; на фиг. 5 шарнирное соединение при противоположном действии нагрузки; на фиг. 6 коленный сустав протеза; на фиг.7 протез ноги с коленным суставом протеза; на фиг.8 участок коленного сустава; на фиг.9 коленный сустав, вид сбоку; на фиг.10 то же, в согнутом положении.
На фиг.1 схематически показано шарнирное соединение в выпрямленном положении, состоящее из плоской кинематической шарнирной цепи с четырьмя шарнирными элементами 5, 6, 7, 8, которые соединены через четыре шарнирные точки А, В, С, Д. При этом верхний шарнирный элемент 6 с помощью схематически подсоединенного устройства соединен с верхней частью вспомогательного технико-ортопедического средства. Точно также нижний шарнирный элемент 8 имеет подсоединительное устройство для нижней части вспомогательного технико-ортопедического средства. На шарнирном элементе 5, расположенном на фиг.1 справа, речь идет о соединительном элементе, расположенном на стороне прямого участка, против которого расположен лежащий на стороне сгибания образованный представленным слева шарнирным элементом 7 соединительный элемент. Прямое положение этого движения поворота определяется упором 9, который ограничивает максимум угла U, между верхним шарнирным элементом 6 и соединительным элементом 5 со стороны прямого участка.
Речь идет об известном шарнирном соединении, в котором расстояния между соседними шарнирными точками в каждом случае неизменяемы. Характеристика сгибания представлена исходя из выпрямленного положения, показанного толстыми сплошными линиями (α0) в трех положениях сгибания (α1, α2, α3) нижней части соединения по отношению к верхней части соединения, находящейся в покое. Эта характеристика изгиба складывается из составляющих поступательного и вращательного движений и приводит к многоцентровому движению, которое показано штриховой линией, соответствующей неподвижной верхней части сочленения полярной РК (неподвижной центроидой), которая соединяет все относящиеся к соответствующим положениям изгиба моментные центры вращения Р между собой, из которых моментный центр вращения Р0, соответствующий в показанном примере прямому положению, лежит дальше всех выше сочленения.
На фиг.2 показано предложенное шарнирное соединение. Элемент 7 сочленения со стороны изгиба выполнен с возможностью пружинно-упругого изменения по длине под воздействием внешнего усилия сжатия, в процессе которого нижняя шарнирная точка С может смещаться под воздействием пружины сжатия 22 в направлении его верхней шарнирной точки и D. Исходя из ненагруженного исходного положения (β0 α0), обозначены две позиции смещения шарнирной точки С в зависимости от нагрузки, которые ведут к отклонению нижнего шарнирного элемента 8 на угол β1 или β2 и к повороту элемента 7 сочленения со стороны изгиба вокруг его верхней шарнирной точки D. Речь идет о дополнительной кинематике, зависящей от нагрузки, которая на чертежах обозначена соответственно углом β и которую можно распознать благодаря тому, что задаваемая первым упором 9 поворота позиции угла сохраняется между жестко образованными шарнирными элементами 5 и 6.
Зависящая от нагрузки дополнительная кинематика вызывает движение изгиба нижней части шарнирного соединения по сравнению с неподвижной верхней частью при одновременном смешении моментного центра вращения Р, который определяется в каждом случае точкой пересечения линий, продолжающихся от обоих соединительных элементов 5, 7. При этом смешение моментного центра вращения Р осуществляется в зависимости от положения изгиба β нижней части на прямой, представляющей продолжение продольной оси того или иного соединительного элемента 5, 7, заданное первым упором 9 поворота предельное положение которого сохраняется. В примере выполнения согласно фиг.2, все моментные центры вращения Р0, Р1, P2 лежат на обозначенном штрихпунктиром продолжении соединительного элемента 5, причем в выбранном примере моментные центры вращения Р1 с увеличением угла сгибания β удаляются от шарнира. Этому действию придается самое большое значение.
Пример выполнения согласно фиг.3 отличается от примера согласно фиг.2 лишь тем, что шарнирная точка С может смещаться не в направлении к шарнирной точке D, а в направлении к шарнирной точке В под воздействием пружины или т. п. Смещение шарнирной точки С осуществляется при этом внутри продольной прорези 17 так, что получается зависящий от нагрузки поворот нижнего шарнирного элемента 8, а также смещается моментный центр вращения Р аналогично фиг.2.
На фиг.4 показана сравнимая с фиг.2 форма выполнения, причем теперь только первый упор 9 ограничивает поворот элемента 7, находящегося на стороне сгибания, относительно верхнего шарнирного элемента 6. Смещение моментных точек поворота в зависимости от положения сгибания β нижней части шарнирного соединения относительно неподвижной верхней части осуществляется на штрихпунктирной линии, обозначающей продолжение соединительного элемента 7, находящегося на стороне сгибания. Далее обозначен продольный упор 30, который ограничивает максимум сокращения соединительного элемента 7 на стороне сгибания или смещение шарнирной точки С относительно шарнирной точки D.
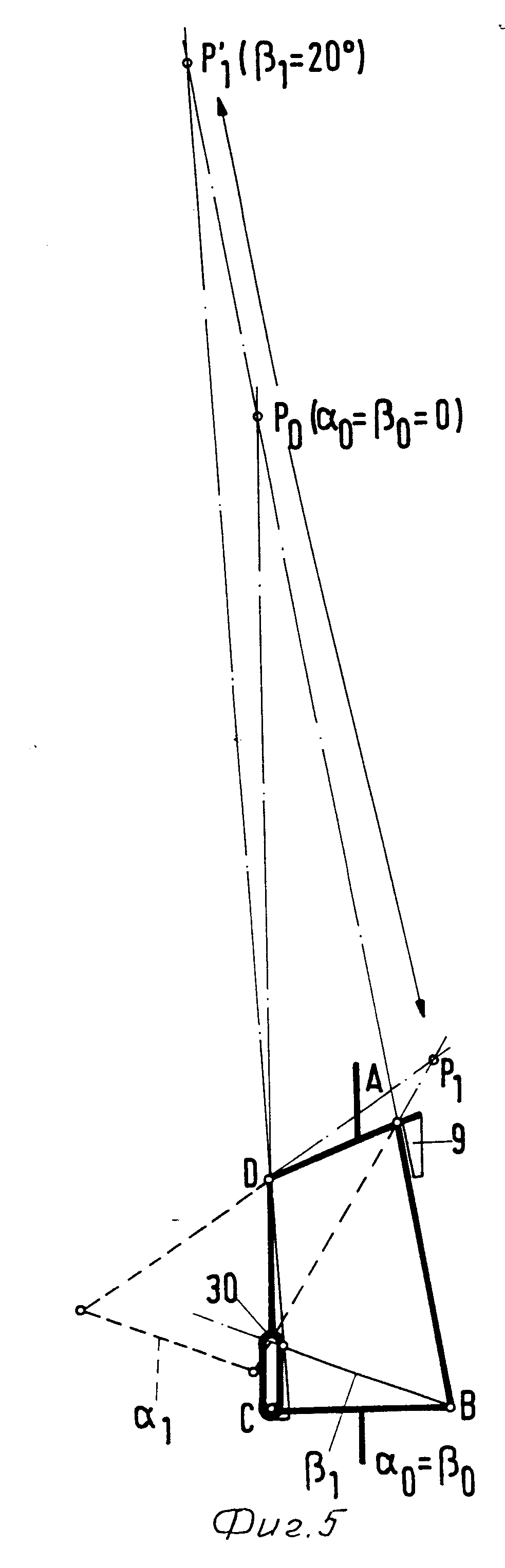
На фиг. 5 показано шарнирное соединение согласно фиг.2, видно преимущество достигаемой согласно изобретению зависящей от нагрузки дополнительной кинематики, по сравнению с обычной основной кинематикой, не зависящей от нагрузки. При основной кинематике, когда угол сгибания α1 20о, моментный центр вращения Р1 лежит вблизи над шарниром и перед его ограничением со стороны прямого участка, при зависящем от нагрузки угле сгибания β1 20о моментная точка поворота, получающаяся при этом, лежит на большом расстоянии выше шарнира и сзади его ограничения со стороны сгибания. Производимый под воздействием направленной к пятке нагрузки F в вытянутом положении момент выпрямления изгиба Мо Fx α0 повышается в случае сгибания колена путем использования зависящей от нагрузки дополнительной кинематики до значения, большего в два раза M1' Fx α1'. В случае сгибания колена путем простого использования не зависящей от нагрузки основной кинематики обычной конструкции получился бы напротив экстремально высокий, имеющий обратное направление изгибающий момент, который не мог бы быть скомпенсирован мускулярно и вследствие этого в практическом случае неизбежно привел бы к спотыканию или падению ампутированного.
Коленный сустав 1 (см. фиг.7-10) соединяет голень протеза 2 с бедром 4. Коленный сустав 1 в основном образует плоскую состоящую из четырех шарнирных элементов 5, 6, 7, 8 кинематическую шарнирную цепь. Верхний шарнирный элемент 6 прочно соединен с верхней частью протеза 4, а нижний шарнирный элемент 8 прочно соединен с нижней частью протеза 2. Показанный на чертеже слева шарнирный элемент 7 выполнен с возможностью сохранения в размере как соединительный элемент, расположенный на стороне сгибания.
Моментная точка вращения Р нижней части протеза 2 относительно верхней части протеза 4 получается в точке пересечения обозначенных штрихпунктиром продолжений обоих шарнирных элементов 5, 7. Первый упор 9 поворота ограничивает отклонение элемента 5 относительно верхнего шарнирного элемента 6 и определяет благодаря этому предельное прямое положение коленного сустава 1, который, кроме того, имеет еще и второй упор 10 поворота, который определяет наименьший угол между шарнирными элементами 8, 5 и благодаря этому ограничивает сокращение элемента 7. На фиг.7 угол между соединительным элементом на стороне прямого участка 5 и верхним шарнирным элементом 6 обозначен через U, а угол между соединительным элементом на прямой стороне 5 и нижний шарнирным элементом 8 обозначен L.
Представленный на фиг.7-10 протез выполнен следующим образом.
Голень протеза 2 состоит из модульной части, на нижнем конце которой закреплена стопа протеза 3. Верхняя часть протеза 4 может быть выполнена для соединения с концом голени или с вычлененным концом колени.
Верхний шарнирный элемент 6 с помощью болта 11 и штифта 12 закреплен без возможности поворота на соединительной части верхней части протеза 4 (см. фиг. 8). Соединительные элементы 5, 7 своим соответствующим верхним концом шарнирно закреплены с возможностью поворота с помощью расположенных в отверстиях 13 верхнего шарнирного элемента 6 поворотных устройств 14 на верхнем шарнирном элементе 6. Первый упор 9 для отклонения жестко расположен на верхнем шарнирном элементе 6, взаимодействует с передней плоскостью 15 соединительного элемента 5 со стороны прямого участка (см. фиг.8) и ограничивает его угол отклонения (см. фиг.7). Этот первый упор 9 отклонения может (на чертеже не показано) быть выполнен с возможностью регулирования, так что можно изменять основную геометрию четырехэлементной шарнирной цепи, а также положение ее моментного центра вращения в вытянутом положении, чтобы можно было привести в соответствие основную регулировку протеза и индивидуальные потребности ампутированного в отношении надежности и динамики.
Оба соединительных элемента 5, 7 своим нижним концом с помощью поворотных устройств 16 шарнирно прикреплены к нижнему элементу сочленения 8, который прикреплен к верхнему концу модульной части 12 путем зажимания. Поворотное устройство 16, к которому шарнирно подсоединен нижний конец соединительного элемента 7, находящегося на стороне сгибания, проводится через продольную прорезь 17 в нижнем шарнирном элементе 8 и может быть зафиксирован в нужной позиции внутри продольной прорези 17. Благодаря этому можно изменять положением соединительного элемента 5 на стороне изгиба путем ручного изменения длины нижнего шарнирного элемента 8, чтобы, в частности, оптимизировать положение по высоте центра вращения в данный момент Р и тем самым общие свойства стабильности коленного сустава 1.
Соединительный элемент 7 на стороне сгибания включает болт 18, который направляется своим нижним концом с возможностью смещения по длине, в опорном каркасе 19, размещенном с возможностью поворачивания на поворотном устройстве 16. На нижний конец болта 18 навинчена гайка 20, которая в ненагруженном состоянии движения поворота определяет эффективную основную длину соединительного элемента 7, который может быть выполнен с возможностью регулирования, например, с помощью применения другой контргайки, чтобы сохранить дополнительную возможность юстировки.
На верхнюю часть болта 18 также навинчена гайка 21, которая может перемещаться относительно отверстия в болте, с помощью которого болт шарнирно прикреплен к верхнему поворотному устройству, и образует опору для пружины сжатия 22, которая своим нижним концом опирается на опорное тело 19. С помощью поворота верхней гайки 21 можно регулировать предварительное натяжение пружины сжатия 22.
Когда коленный сустав 1 нагружается, например, весом тела пользователя протеза, пpужина сжатия 22 сжимается при одновременном смещении болта 18 относительно опорного тела 19. Благодаря этому расстояние между обоими поворотными устройствами 14, 16 и тем самым важная для кинематики сустава эффективная длина соединительного элемента 7, находящегося на стороне сгибания, уменьшается. В результате изменяется положение моментного центра вращения.
Соединительный элемент, расположенный на стороне сгибания, может быть выполнен в виде пластинчатой пружины, которая под нагрузкой прогибается сильнее, благодаря чему также может быть снижено расстояние между обеими центрами тяжести 14, 16.
Если протез находится в выпрямленном состоянии (см. фиг.9) и в этом положении нагружается весом Г пользователя протеза, то большое значение имеет то, что моментный центр вращения Р расположен сзади линии нагружения, поскольку только так можно избежать того, что многоэлементная шарнирная цепь под воздействием нагрузки выполняет поворот в соответствии со своей основной кинематикой. Так как в выпрямленном состоянии положение шарнирных элементов 5, 6 относительно друг друга задается первым упором 9 отклонении, то благодаря уменьшению эффективной длины шарнирного элемента 7 осуществляется смещение моментной точки вращения Р на линии, которая получается из удлинения переднего шарнирного элемента 5 или соединительной линии между его шарнирными точками 15, 16. Для достижения возможно большей стабильности важно, чтобы эта линия всегда лежала позади линии действия нагрузки Г.
Для комфортности протеза ноги с многоцентровым коленным суставом большое значение имеет, чтобы моментный центр вращения Р с увеличением угла сгибания колена, в частности, во время маховой фазы или в сидячем положении перемещался в позицию, близкую к колену, (см. фиг.10).
Реферат
Изобретение относится к протезостроению и может быть использовано в протезах нижней конечности. Шарнирное соединение состоит из плоской кинематической шарнирной цепи с четырьмя шарнирными элементами которые через четыре шарнирные точки соединены друг с другом. При этом верхний шарнирный элемент соединен с верхней частью вспомогательного ортопедического средства. Нижний шарнирный элемент имеет подсоединительное устройство для нижней части вспомогательного технико-ортопедического средства. 5 з. п. ф-лы, 10 ил.
Формула
26.01.90 по пп.1,2 и 4.
Комментарии