Вакуумный щелевой затвор - RU2780115C1
Код документа: RU2780115C1
Чертежи

Описание
Изобретение относится к оборудованию вакуумных приборов и может быть использовано в качестве загрузочных или шлюзовых устройств. Вакуумный щелевой затвор предназначен для взаимной изоляции вакуумных объемов в транспортных системах со шлюзовой или кластерной камерами.
Известно устройство вакуумного затвора вакуумной камеры (патент на полезную модель TWM315287, МПК F16K 51/02, опубл. 11.07.2007 г.), содержащее корпус, пару затворяющих пластин (заслонок), пару клиньев, пару направляющих по объёму, связи и ответные пружины. Существенным недостатком данного устройства является то, что при движении заслонок на уплотнение продолжается движение заслонок на закрытие, что приводит к повышенному износу уплотнительного элемента.
Известен вакуумный клапан с датчиком давления (европейский патент на изобретение №3421851A, МПК F16K 3/00; F16K 3/02; F16K 3/18 и др., опубл. 02.01.2019 г.), включающий корпус, заслонку, седло заслонки, приводной блок и датчик давления, в котором направление движения заслонки на закрытие совпадает с направлением движения на уплотнение. Недостатком этого клапана является высокая сложность изготовления поверхности уплотнения как на заслонке, так и на ответном седле корпуса заслонки. Также требуется высокая точность изготовления, что может быть проблематичным при больших габаритах заслонки. При уплотнении заслонки сжатие уплотнительного шнура на разных линиях уплотнения происходит под разными углами – как по нормали, так и под острыми углами, что приводит к повышенному износу уплотнительного элемента.
Наиболее близким аналогом является затвор (заявка на изобретение Германии №102008027944B3, МПК F16K 3/18, опубл. 30.07.2009 г.), включающий корпус затвора со стенкой, выступающей из отверстия, седло, окружающее отверстие, пластину, стержень, подъемный элемент с приводом, перемещающий пластину, и опорные элементы. Такое устройство сложно изготовить, так как оно имеет в своем составе множество роликов и шарнирные запирающие механизмы, требующие высокой точности изготовления и жесткости конструкции. К тому же, жесткость штоков приводов перемещения недостаточна, что приводит к необходимости увеличивать количество приводов на единицу длины затвора или использования затвора только в одном положении – приводами вверх.
Задачей изобретения является создание новой конструкции вакуумного затвора, способного работать при перепаде давлений в 105Па и возможности менять геометрию затвора с сохранением конструкции механизма поступательного перемещения заслонки, а также с сохранением надежности вакуумного затвора.
Технический результат, достигаемый заявляемым изобретением – повышение качества герметизации длинномерных и разных по геометрии проходных сечений и повышение надежности вакуумного затвора.
Технический результат достигается тем, что вакуумный щелевой затвор включает корпус затвора, заслонку, привод, механизм перемещения заслонки со штоком затвора и механизм герметизации заслонки, установленный в сквозном отверстии штока затвора и включающий толкатель заслонки, пружину, охватывающую толкатель заслонки, и ролик толкателя заслонки, закрепленный одновременно на заслонке и на толкателе заслонки; при этом механизм перемещения заслонки выполнен в виде коаксиальной поступательной пары, размещенной в корпусе затвора и включающей шток затвора и толкатель затвора, также на внешней стенке штока затвора установлен распорный ролик, выполненный с возможностью перемещения по стенке корпуса, а толкатель затвора содержит конусный наконечник, выполненный с возможностью зацепления с механизмом герметизации заслонки для обеспечения плотного прилегания заслонки к корпусу затвора.
Далее изобретение описывается следующими чертежами:
Фиг. 1 - Общий вид конструкции вакуумного щелевого затвора.
Фиг. 2 - Вид в разрезе А-А вакуумного щелевого затвора на фиг. 1.
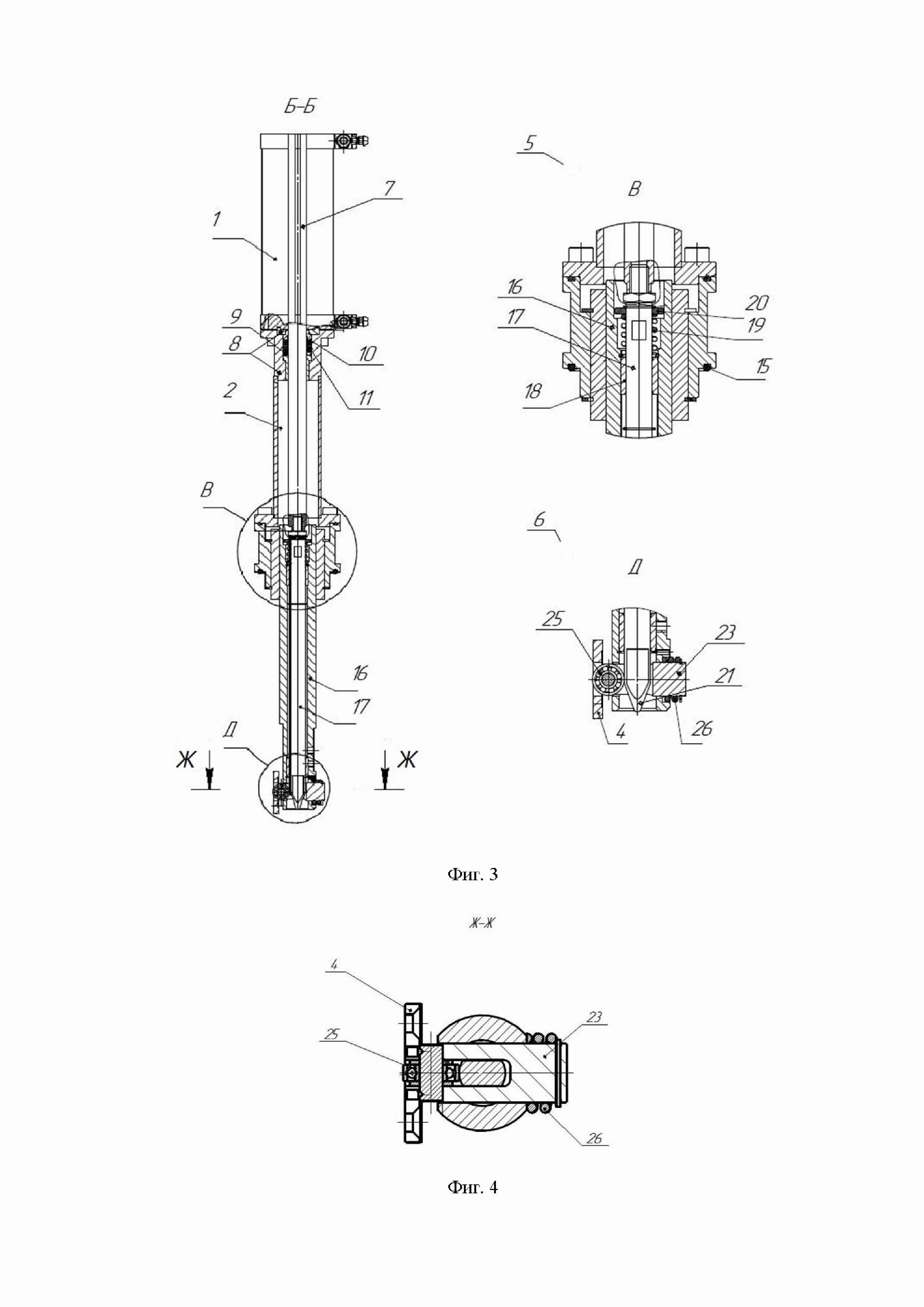
Фиг. 3 - Вид в разрезе Б-Б вакуумного щелевого затвора на фиг. 1.
Фиг. 4 - Вид в разрезе Ж-Ж вакуумного щелевого затвора на фиг. 3.
Вакуумный затвор содержит привод 1, соединенный посредством переходника 2 с корпусом 3 затвора, включающим заслонку 4, механизм перемещения 5 заслонки 4 и механизм герметизации 6 заслонки 4 (фиг. 1 и фиг. 3).
Приводом 1 служит пневмоцилиндр, выполненный со штоком 7. Привод 1 соединен с переходником 2 фланцевыми втулками 8 (вид Б-Б на фиг. 3). В других вариантах реализации возможно применение электромеханического или гидравлического привода.
Шток пневмоцилиндра 7 герметизирован в переходнике 2 узлом уплотнения, в котором резиновые уплотнительные кольца 11 обжимают шток пневмоцилиндра 7 через фторопластовую фланцевую втулку 9. Надежность герметизации уплотнительного узла достигается регулировочными шайбами 10, установленными между уплотнительными кольцами 11.
Корпус 3 затвора выполнен с крышкой 12, которая герметизируется уплотнительным элементом 13. Крышка 12 обеспечивает доступ к элементам вакуумного затвора, расположенным в корпусе 3 затвора. Корпус 3 затвора герметизируется относительно вакуумных объёмов уплотнителем 14 (фиг. 2).
Механизм перемещения 5 заслонки 4 закреплен к корпусу 3 затвора через уплотнительную прокладку 15. Механизм перемещения 5 заслонки 4 включает коаксиальную поступательную пару, состоящую из штока 16 затвора и расположенного внутри штока 16 толкателя 17 затвора, линейный подшипник 18, жестко закрепленный к внутренней стенке штока 16 затвора и пружину 19, охватывающую толкатель 17 затвора и расположенную между торцом линейного подшипника 18 и шайбой 20, установленной на толкателе 17 затвора (вид В на фиг. 3).
Толкатель 17 затвора соединен со штоком 7 пневмоцилиндра и выполнен с возможностью возвратно-поступательного перемещения внутри штока 16 затвора под действием перемещения штока 7 пневмоцилиндра. Толкатель 17 затвора выполнен с конусным наконечником 21 в нижней части, взаимодействующим с механизмом герметизации 6.
На штоке 16 затвора закреплен посредством кронштейна распорный ролик 22, а в нижней части штока 16 выполнено сквозное отверстие под механизм герметизации 6 заслонки. Распорный ролик 22 выполнен с возможностью перемещения по стенке корпуса 3 к упорной пластине 24, закрепленной на внутренней стенке крышки 12 корпуса 3 затвора (вид Г на фиг. 2). Распорный ролик 22 необходим для предотвращения изгиба штока 16 затвора.
Механизм герметизации 6 проходит через сквозное отверстие на нижней части штока 16 затвора. Механизм герметизации 6 включает толкатель 23 заслонки, пружину 26, которая охватывает толкатель 23 заслонки, и ролик 25 толкателя 23 заслонки. Толкатель 23 заслонки выполнен с отверстием, обеспечивающим возможность прохождения через него конусного наконечника 21 толкателя 17 затвора, при этом толкатель 23 заслонки выполнен с возможностью возвратно-поступательного перемещения в поперечном направлении относительно конусного наконечника 21 для плотного прижатия заслонки 4 к стенке корпуса 3 затвора в положении закрытия или отдаления заслонки 4 от стенки корпуса 3 в положении открытия (вид Д на фиг. 3 и вид Ж-Ж на фиг. 4).
Заслонка 4 жестко закреплена на толкателе 23 заслонки через ролик 25 толкателя 23 заслонки и выполнена с возможностью возвратно-поступательного перемещения совместно с перемещением штока 16 затвора по направляющим посредством закрепленных на концах заслонки 4 упорных роликов 27 с ограничением хода до упора, выполненного на корпусе 3 затвора (вид Е-Е на фиг. 1). Заслонка 4 герметизируется относительно корпуса 3 затвора уплотнителем 28 (фиг. 2).
В зависимости от геометрических размеров заслонки 4 количество механизмов перемещения 5 заслонки с механизмами герметизации 6 заслонки может меняться от одного до пяти и более.
Вакуумный щелевой затвор работает следующим образом. При подаче сжатого воздуха в привод 1 (пневмоцилиндр) на закрытие, происходит линейное перемещение штока 7 пневмоцилиндра и толкателя 17 затвора, соединенного со штоком 7 пневмоцилиндра.
Перемещение толкателя 17 затвора сопровождается сжатием пружины 19, расположенной между линейным подшипником 18 и шайбой 20, установленной на толкателе 17 затвора. Пружина 19 механизма перемещения 5 заслонки давит на линейный подшипник 18 и вызывает поступательное перемещение линейного подшипника 18 и жестко связанного с ним штока 16 затвора вместе с заслонкой 4.
Шток 16 затвора перемещается до тех пор, пока заслонка не упрется упорными роликами 27 заслонки 4 в упоры, выполненные в корпусе затвора. При дальнейшем движении штока 7 пневмоцилиндра продолжает движение только толкатель 17 затвора. Толкатель 17 затвора конусным наконечником 21 наезжает на ролик 25 толкателя 23 заслонки и передвигает заслонку к корпусу 3 затвора до ее плотного прилегания. С целью предотвращения изгиба штока 3 затвора и разгерметизации затвора при перепаде давления в закрытом состоянии шток 3 затвора через распорный ролик 22 опирается на упорную пластину 24 крышки 12 затвора.
Открытие вакуумного затвора происходит в обратной последовательности: когда толкатель 17 затвора поднимается вверх, коническая часть 21 толкателя 17 выходит из отверстия толкателя 23 заслонки, пружина 26 разжимается, толкатель 23 заслонки движется вправо вместе с самой заслонкой 4. Таким образом, заслонка 4 отодвигается от поверхности уплотнения на стенке корпуса 3.
Преимущества заявляемого изобретения
Данная конструкция позволяет изменять геометрию затвора с сохранением конструкции механизма поступательного перемещения заслонки в зависимости от перекрываемого сечения. Использование перемещающегося штока затвора в паре с толкателем на порядок повышает жесткость механизма перемещения заслонки, что позволяет уменьшить количество приводов на единицу длины затвора и эксплуатировать затвор в любых положениях. Заявляемое изобретение способно работать при перепаде давлений в 105Па и сохранять герметичность вакуумного затвора. Заявляемое изобретение отличается простотой конструкции и минимальным количеством трущихся элементов, что приводит к высокой надёжности и повышенному ресурсу работы.
Реферат
Изобретение относится к оборудованию вакуумных приборов и может быть использовано в качестве загрузочных или шлюзовых устройств. Вакуумный щелевой затвор предназначен для взаимной изоляции вакуумных объемов в транспортных системах со шлюзовой или кластерной камерами. Вакуумный щелевой затвор включает корпус затвора, заслонку, привод, механизм перемещения заслонки со штоком затвора и механизм герметизации заслонки, установленный в сквозном отверстии штока затвора и включающий толкатель заслонки, пружину, охватывающую толкатель заслонки, и ролик толкателя заслонки, закрепленный одновременно на заслонке и на толкателе заслонки; при этом механизм перемещения заслонки выполнен в виде коаксиальной поступательной пары, размещенной в корпусе затвора и включающей шток затвора и толкатель затвора, также на внешней стенке штока затвора установлен распорный ролик, выполненный с возможностью перемещения по стенке корпуса, а толкатель затвора содержит конусный наконечник, выполненный с возможностью зацепления с механизмом герметизации заслонки для обеспечения плотного прилегания заслонки к корпусу затвора. Изобретение направлено на повышение качества герметизации длинномерных и разных по геометрии проходных сечений и повышение надежности вакуумного затвора. 5 з.п. ф-лы, 4 ил.

Формула
Документы, цитированные в отчёте о поиске
Сверхвысоковакуумный затвор
Комментарии