Ортопедический коленный сустав, а также способ управления ортопедическим коленным суставом - RU2488367C2
Код документа: RU2488367C2
Чертежи



Описание
Изобретение относится к ортопедическому коленному суставу, содержащему верхнюю часть, на которой расположены верхние соединительные средства, установленную с возможностью поворота на верхней части нижнюю часть с соединительными средствами для протезных компонентов и упор для ограничения движения распрямления, а также к способу управления ортопедическим коленным суставом.
Целью снабжения протезом является, в принципе, обеспечение возможно лучшей замены утерянных частей тела при минимальных функциональных ограничениях. Если для пациента должен быть предусмотрен протез бедра с протезом коленного сустава, то имеется множество конструктивных возможностей выполнения такого протеза коленного сустава.
Простой, пассивный, моноцентричный протезный коленный сустав особенно прост по конструкции и в изготовлении, однако воспроизводит естественный коленный сустав лишь неполноценно и не обеспечивает, в частности, естественную походку. Защиту от подкашивания протезного коленного сустава можно выполнять с помощью соответствующего стабильного выполнения, т.е. согласования отдельных протезных компонентов друг с другом и с телом, при необходимости с поддержкой блокировочного устройства при так называемом коленном суставе с замковым устройством. В таком протезном коленном суставе колено в конце фазы маха всегда полностью распрямлено, за счет чего моноцентричные коленные суставы, из-за требования статически надежного выполнения также при наступании на пятку, не имеют или имеют лишь небольшую склонность к наклону внутрь. Это приводит к тому, что ударная нагрузка при наступании на пятку передается непосредственно в культю бедра или в бедро, в то время как физиологически при наступании на пятку происходит сгибание естественного коленного сустава примерно на 25°, что приводит к значительному демпфированию наступания.
Наряду с моноцентричными протезными коленными суставами имеются полицентричные протезные коленные суставы, которые при соответствующем высоком положении мгновенной точки поворота положения разгибания имеют ярко выраженную внутреннюю стабильность не только при стоянии, но также при нагрузке на пятку в начале фазы опоры при ходьбе. Кроме того, с помощью такого полицентричного протезного коленного сустава можно достигать гармоничного перехода в фазу маха и инициирования сгибания колена при нагрузке на плюсну. За счет этого происходит сближение с естественной походкой. Полицентричные протезные коленные суставы часто имеют демпфирующие устройства, с помощью которых можно инициировать упруго пружинящее или демпфированное сгибание колена без потери устойчивости. Описание полицентричного протезного коленного сустава с регулируемым упором поворота приведено в DE 4004988 A1.
Кроме того, известны так называемые активные протезные коленные суставы, которые с помощью электродвигателя инициируют сгибание и распрямление на основе данных датчиков. Имеются также активные демпфирующие устройства для согласования демпфирования с конкретными потребностями. Такие протезные коленные суставы являются чрезвычайно затратными по конструкции и в изготовлении.
Исходя из этого уровня техники, в основу изобретения положена задача создания дешевого протезного коленного сустава и способа управления протезным коленным суставом, с помощью которых пользователю обеспечивается возможность удобной ходьбы и расслабленного стояния.
Эта задача решена согласно изобретению с помощью ортопедического коленного сустава с признаками п.1 формулы изобретения, а также способа управления ортопедическим коленным суставом с признаками п.7 формулы изобретения. Предпочтительные варианты выполнения и модификации изобретения приведены в соответствующих зависимых пунктах формулы изобретения.
В предложенном ортопедическом коленном суставе, содержащем верхнюю часть, на которой расположены верхние соединительные средства, установленную с возможностью поворота на верхней части нижнюю часть, соединительные средства для протезных компонентов и упор для ограничения движения распрямления, предусмотрено, что упор выполнен с возможностью перемещения и соединен с перестановочным устройством, которое, в свою очередь, соединено с управляющим устройством, которое приводит в действие перестановочное устройство в зависимости от данных датчиков и изменяет положение упора. Под ортопедическим коленным суставом понимаются как протезные коленные суставы, так и ортезные коленные суставы. Если в последующем речь идет о коленных суставах, то имеются в виду ортезные и протезные коленные суставы, естественные коленные суставы обозначаются отдельно как таковые. Если в коленном суставе, в частности в одноосном коленном суставе, предусмотрено регулируемое положение упора распрямления, то для ходьбы упор распрямления может быть перемещен вперед, за счет чего может быть реализован больший наклон при наступании на пятку для сгибания коленного сустава и, тем самым, повышенное демпфирование при инициировании фазы стояния. Для стояния перестановочное устройство может приводиться в действие так, что упор распрямления отодвигается назад, так что может быть реализована статически более надежная конструкция протеза или ортеза. За счет активной перестановки действующего положения упора распрямления пользователю может обеспечиваться более удобная ходьба за счет активизирующего смещения вперед и расслабленное стояние вследствие устойчивой конструкции.
Предпочтительно, в перестановочном устройстве предусмотрен электродвигатель, который за счет соответствующего управления обеспечивает возможность очень точного позиционирования упора в зависимости от данных датчиков.
В качестве альтернативного решения, перестановочное устройство может перестанавливать упор гидравлически, при этом за счет основных демпфирующих свойств гидравлической перестановочной системы одновременно реализуется демпфирование упора. При перестановке чисто с помощью электродвигателя упор может быть снабжен демпфированием упора для разгрузки как механических компонентов коленного сустава, так и культи бедра.
Данные датчиков предпочтительно получают с помощью датчиков, которые могут быть выполнены в виде датчиков угла сгибания, датчиков наклона, датчиков ускорения и/или датчиков силы, с целью обеспечения необходимых для детектирования соответствующего состояния движения данных с возможно более высокой точностью и доступностью.
Упор может быть соединен с перестановочным устройством с помощью резьбы, так что можно осуществлять шпиндельную перестановку, при этом может приводиться в движение либо сам шпиндель, либо шпиндельная гайка, т.е. внутренняя резьба или наружная резьба, при этом не приводимый непосредственно элемент перемещается в соответствующем направлении.
Ортезные или протезные коленные суставы часто имеют демпфирующие устройства или другие гидравлические устройства, при которых через гидролинии движется гидравлическая текучая среда, когда нижняя часть перемещается относительно верхней части. В таких коленных суставах упор распрямления можно переставлять за счет того, что запирающее устройство, которое расположено в гидравлическом контуре, закрывается с помощью перестановочного устройства, когда достигается желаемое или расчетное угловое положение при движении распрямления. Запирающее устройство, дроссель или клапан могут затем при достижении положения распрямления, при необходимости с замедлением за счет перестановки, закрываться, так что гидравлическая текучая среда не может протекать дальше, за счет чего останавливается движение распрямления. Выполнение упора распрямления в виде гидравлического упора имеет дополнительно то преимущество, что меньше нагружаются механические компоненты коленного сустава.
Согласно изобретению способ управления ортопедическим коленным суставом, содержащим упор распрямления и перестановочное устройство, с помощью которого можно изменять положение упора распрямления, предусматривает, что положение упора распрямления изменяют в зависимости от данных датчиков, в частности, относительно скорости ходьбы и/или ширины шага. При этом скорость ходьбы и/или ширина шага определяются с помощью датчиков, причем рутинная программа регулирования, соответственно, рутинная программа управления предусматривает, что при скорости ходьбы, равной 0, т.е. при стоянии, устанавливается максимальное распрямление, с целью обеспечения максимально надежной конструкции.
Для минимального потребления энергии и достижения равномерной походки во время фазы маха выполняется изменение положения упора распрямления, предпочтительно выполняется непрерывное согласование положения концевого упора, что приводит к тому, что учитываются также изменения в скорости ходьбы, соответственно, в ширине шага. За счет этого возможно, что стабильная конструкция, которая предпочтительна при стоянии, при ходьбе изменяется так, что динамический в фазе стояния коленный сустав даже при высоких скоростях ходьбы может способствовать демпфированию при наступании.
Изменение положения упора разгибания происходит независимо от возможного изменения сопротивления движению в направлении сгиба и распрямления. Упор разгибания можно осуществлять, наряду с перестановкой чисто механических упоров, которые могут быть выполнены в виде упорных плеч, пальцев или т.п., также посредством закрывания клапанов. Коленные суставы, которые имеют регулируемое демпфирующее устройство, могут быть выполнены так, что управляющее устройство в зависимости от полученных данных датчиков закрывает клапан демпфирования распрямления в определенном положении нижней части относительно верхней части, с целью достижения за счет этого ограничения движения поворота. Клапан предпочтительно выполнен в виде запорного клапана, который закрывается при достижении заданного положения, но можно применять также регулируемый дроссель, который используется при согласовании демпфирования распрямления, в качестве запорного клапана.
Ниже приводится подробное пояснение примеров выполнения изобретения со ссылками на прилагаемые чертежи. При этом на чертежах одинаковые компоненты обозначены одинаковыми позициями. При этом на фигурах схематично изображено:
фиг.1 - протез бедра в слегка согнутом положении;
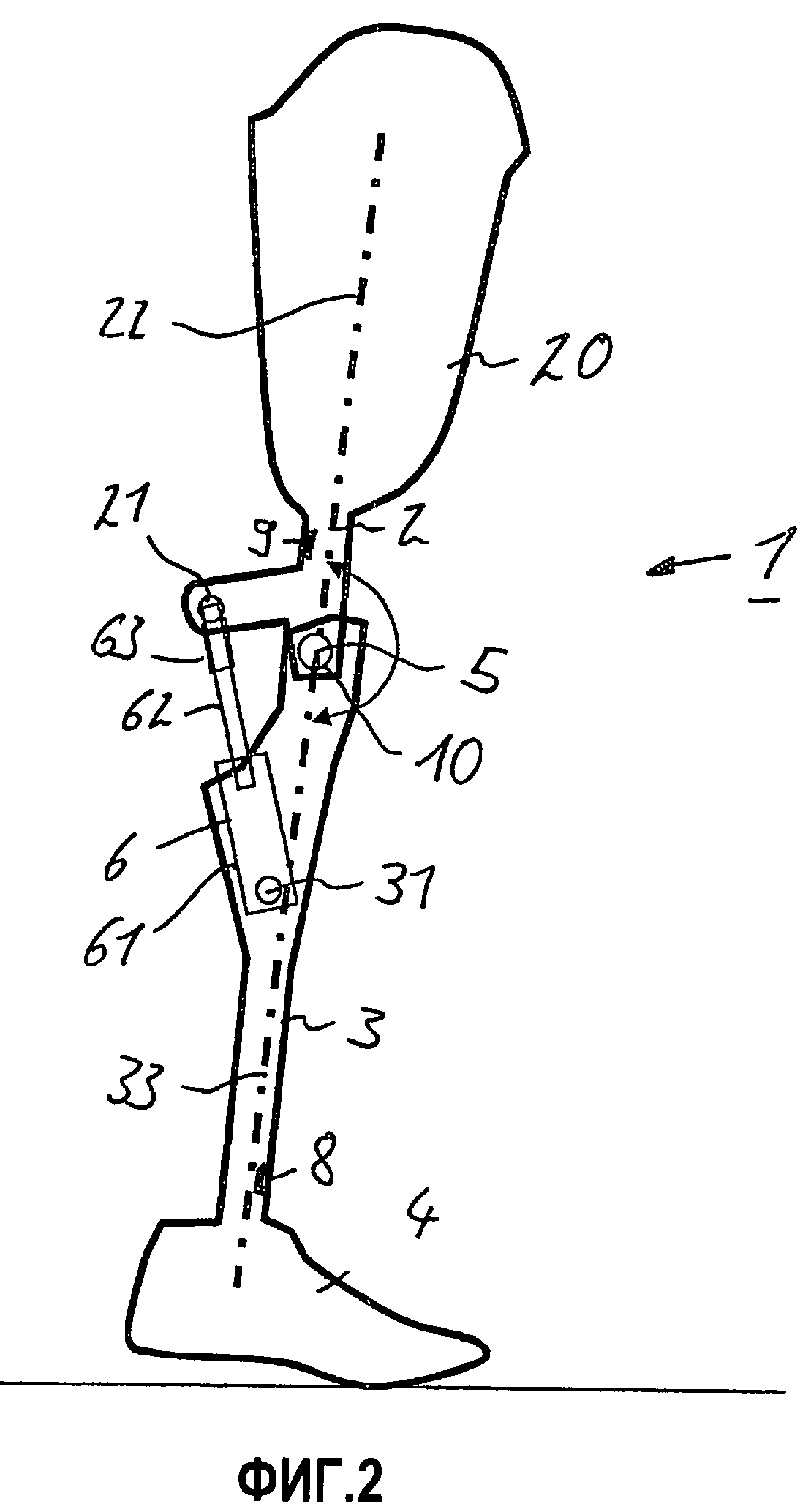
фиг.2 - протез бедра в полностью распрямленном положении;
фиг.3 - протез бедра с изменяемым по длине управляющим блоком;
фиг.4 - протез бедра по фиг.3 с регулируемым с помощью электродвигателя управляющим блоком;
фиг.5 - протез бедра с изменяемым по длине соединительным элементом;
фиг.6 - протез бедра с изменяемым по длине с помощью электродвигателя соединительным элементом;
фиг.7 - протез бедра с установленным с возможностью сдвига в управляющем блоке соединительным элементом; а также
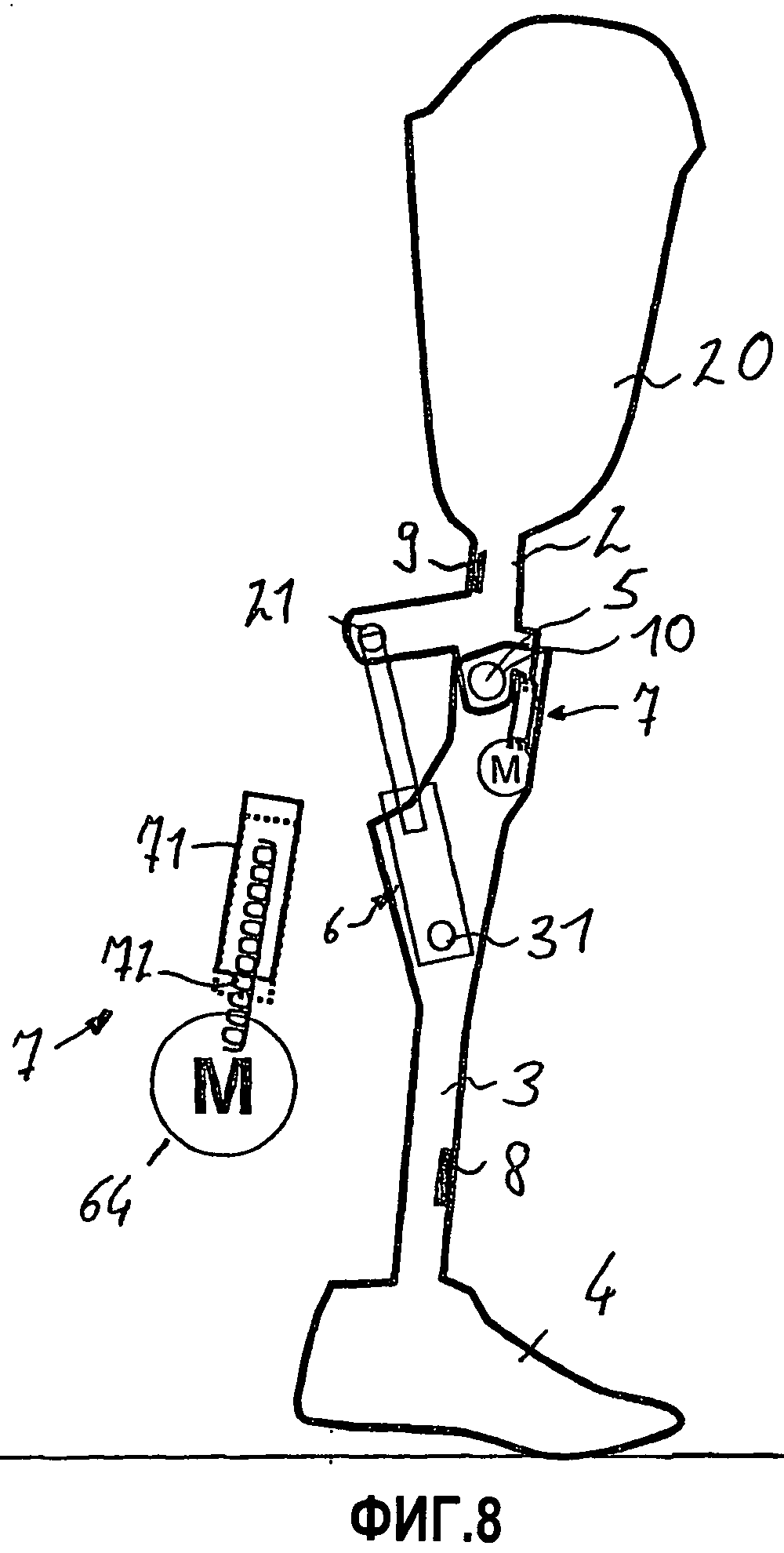
фиг.8 - протез бедра с переставляемым с помощью электродвигателя механическим упором.
На фиг.1 показана принципиальная конструкция ортопедического коленного сустава в виде протеза 1 бедра с верхней частью 2 и нижней частью 3, на которой закреплена протезная ступня 4. Верхняя часть 2 и нижняя часть 3 соединены друг с другом с возможностью поворота вокруг поворотной оси 5. На проксимальном конце верхней части 2 расположено соединительное средство 20 в виде приемной гильзы протеза. При выполнении ортопедического коленного сустава в виде ортеза соединительные средства выполнены в виде частично окружающей бедро чаши или в виде ремня или других крепежных средств. В этом случае верхняя часть 2 и нижняя часть 3 проходят медиально или латерально относительно естественной ноги, и ортопедическим компонентом 4 является подставка для ступни, в которую устанавливается естественная ступня.
Между верхней частью 2 и нижней частью 3 расположен управляющий блок 6, который имеет верхнюю крепежную точку 21 и нижнюю крепежную точку 31. Верхняя крепежная точка 21 относится к верхней части 2, в то время как нижняя крепежная точка 31 относится к нижней части 3. Управляющий блок 6 опирается шарнирно на крепежные точки 21, 31.
Управляющий блок 6 имеет в данном примере цилиндр 61 и поршневой шток 62, которые установлены с возможностью перемещения друг относительно друга. Поршневой шток 62 расположен в верхней крепежной точке 21, в то время как цилиндр 61 расположен в нижней крепежной точке 31. При повороте нижней части 3 относительно верхней части 2, например, при сгибании, поршневой шток 62 входит в цилиндр 61, а при движении разгибания или распрямления оба компонента 61, 62 раздвигаются. Внутри управляющего блока 6 можно устанавливать величину, на которую поршневой шток 62 может выдвигаться из цилиндра 61. В показанном положении коленный сустав максимально распрямлен, при этом продольные оси 22, 33 верхней части 2 и нижней части 3 находятся под углом друг к другу, который не равен 180°. В данном случае верхняя часть 2 слегка согнута к нижней части 3, несмотря на полностью распрямленный протез, который прилегает к упору, который образован поршневым штоком 62 в цилиндре 61.
Как на нижней части 3, так и на верхней части 2 расположены датчики 8, 9, которые могут измерять возникающие внутри протеза 1 моменты, силы или ускорения. Также предусмотрено, что эти датчики 8, 9 определяют информацию о наклоне верхней части 2 или нижней части 3 либо друг относительно друга, либо абсолютно. Также внутри коленного сустава 1 расположен датчик 10 угла сгибания в зоне поворотной оси 5 для определения углового положения осей 22, 23 относительно друг друга и, тем самым, верхней части 2 относительно нижней части 3. Эти датчики 8, 9, 10 соединены с управляющим устройством 6, так что на основе данных датчиков с помощью не изображенного перестановочного устройства можно оказывать влияние на степень распрямления посредством изменения длины выдвижения поршневого штока 62. В управляющем устройстве 6 предусмотрены соответствующие средства обработки данных, которые на основе имеющихся данных вычисляют положение упора и путь перестановки.
На фиг.2 показан коленный сустав 1, который по существу соответствует показанному на фиг.1 коленному суставу. При этом поршневой шток 62 снабжен гильзой 63, которая установлена на поршневом штоке 62 с возможностью сдвига или с возможностью поворота и с помощью которой можно регулировать длину. Если, например, поршневой шток 62 поворачивается с помощью перестановочного устройства, то он может ввинчиваться или вывинчиваться из гильзы, которая снабжена резьбой, с целью реализации при остающемся одинаковым концевом упоре внутри цилиндра 61 изменения коленного угла. В показанном на фиг.2 варианте выполнения коленный сустав 1 изображен в полностью распрямленном положении, что означает, что продольные оси 22, 33 находятся под углом 180° друг к другу, что представляет предпочтительное положение во время стояния, поскольку за счет этого достигается стабильная конструкция.
Показанный на фиг.3 протез отличается от показанного на фиг.2 протеза тем, что управляющий блок 6 выполнен с возможностью изменения по длине, например, с помощью резьбовой гильзы 65 и выполненных с возможностью вращения в противоположных направлениях резьбовых устройств, так что за счет вращения резьбовой гильзы 65, которая в увеличенном виде показана слева от коленного сустава 1, часть управляющего устройства 6 перемещается в направлении к верхней крепежной точке 21 или же удаляется от неё, как обозначено двойной стрелкой. Это происходит за счет соответствующего поворота резьбовой гильзы 65, так что изменение длины управляющего блока 6 вызывает перемещение положения упора, что приводит, в свою очередь, к изменению максимального угла колена в распрямленном положении. При этом часть управляющего блока 6, которая соединена с нижней крепежной точкой 31, остается неподвижной.
На фиг.4 показано, что перемещение можно осуществлять с помощью приводного электродвигателя 64, который представляет перестановочное устройство. В этом случае перестановка происходит на основе вычисления внутри управляющего блока 6, которое выполняется на основе поставляемых датчиками 8-10 данных.
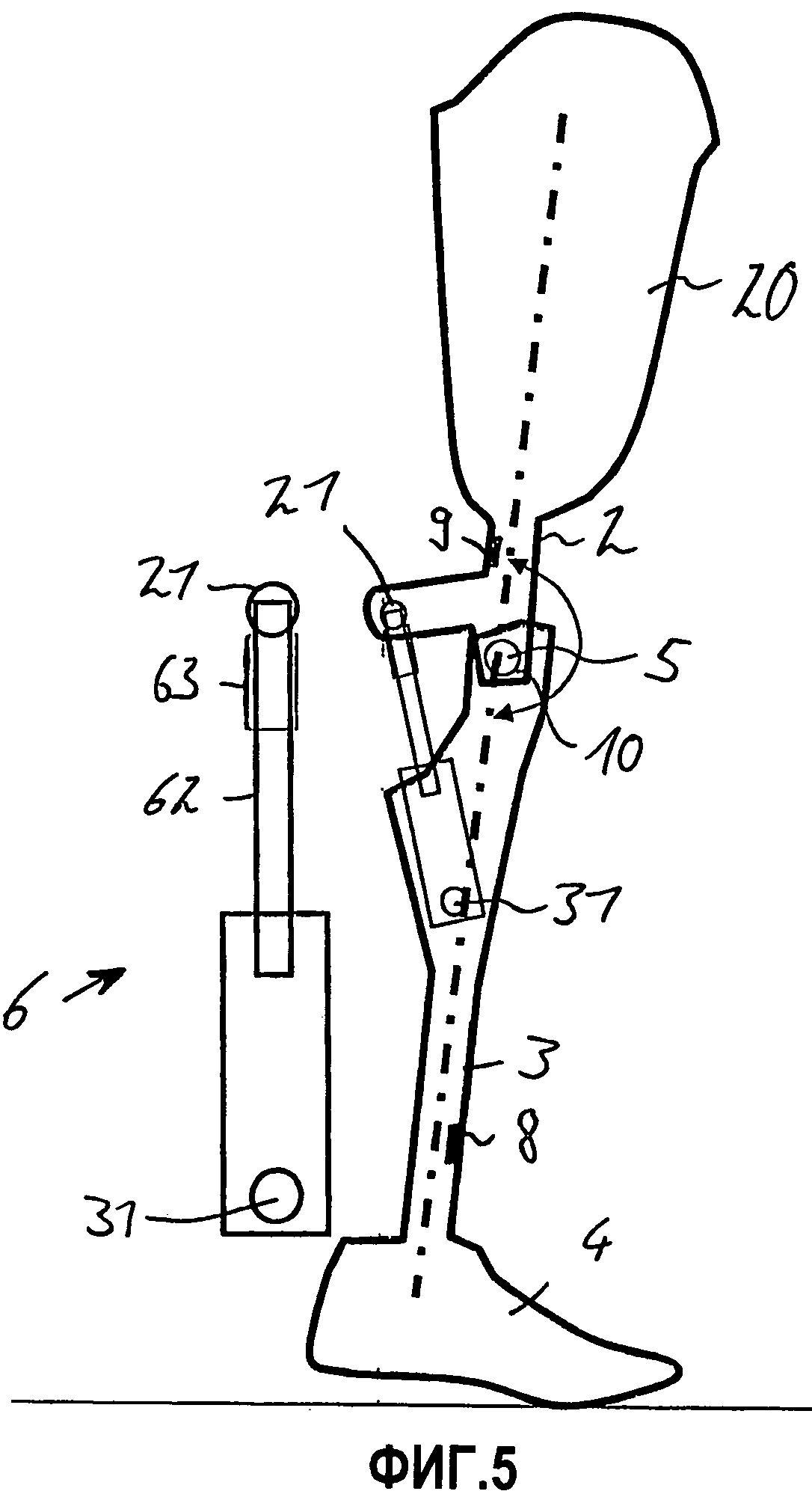
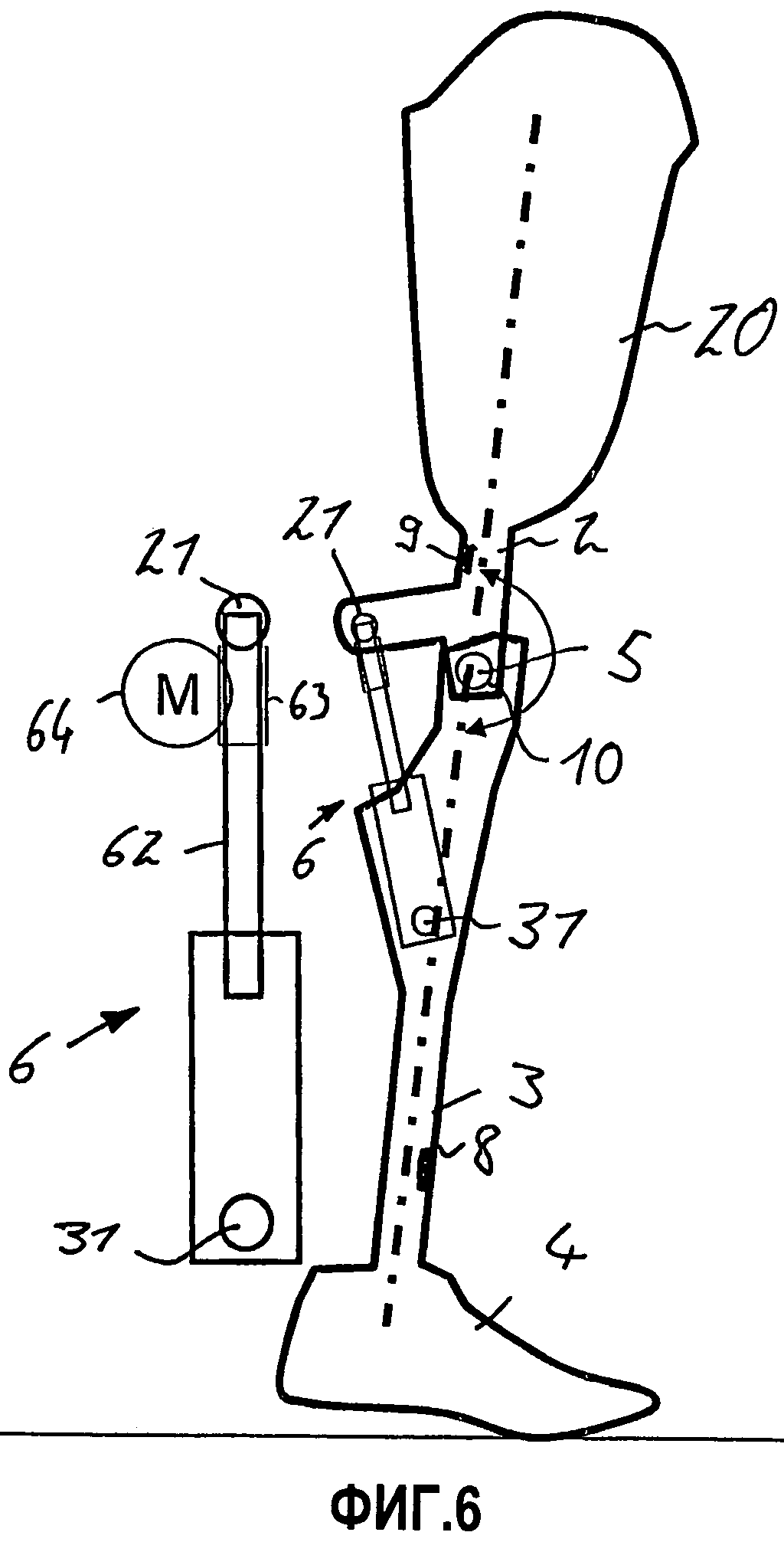
На фиг.5 показан вариант выполнения согласно фиг.2, вместе с увеличенным изображением управляющего блока 6. Резьбовая гильза 65 может вызывать изменение длины поршневого штока 62, т.е. соединительного элемента между нижней частью 3 и верхней частью 2. В данном случае упор также реализован внутри управляющего блока 6, так что при изменении длины соединительного элемента между верхней частью 2 и нижней частью 3 может происходить изменение положения упора. На фиг.6 показано, что это изменение длины соединительного элемента, в данном случае поршневого штока 62, осуществляется с помощью электродвигателя 64. В этом случае перестановку можно выполнять также с помощью поворотного резьбового стержня или поворотной резьбовой гильзы 63, которая входит в зацепление с наружной резьбой поршневого штока 62.
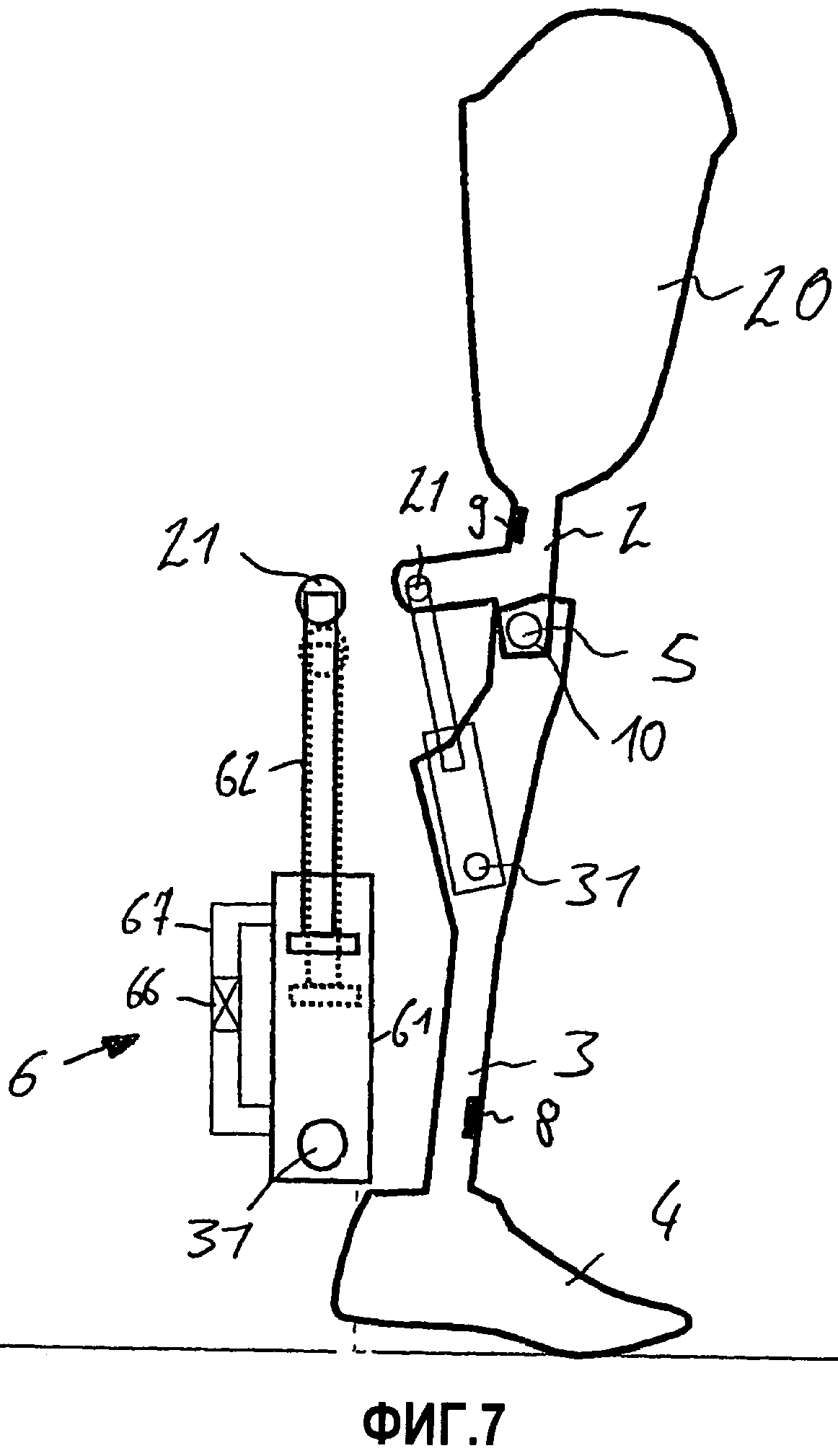
На фиг.7 показан вариант изменения упора. В этом случае упор также реализован в управляющем устройстве 6 посредством изменения максимальной длины выдвижения поршневого штока 62. Это происходит за счет сдвига поршневого штока 62, соответственно, соединительного элемента 62 в направлении нижней крепежной точки 31 в цилиндре 61, например, посредством открывания клапана 66 в байпассной линии 67, так что гидравлическая текучая среда может проникать в верхнюю камеру цилиндра, так что поршневой шток 62 может глубже погружаться в цилиндр 61. Одновременно изменяется положение упора в направлении распрямления, поскольку поршневой шток 62 раньше упирается в максимальный упор внутри цилиндра 61, соответственно, оказывает давление на гидравлическую жидкость. Таким образом, за счет сдвига соединительного звена, соответственно, поршневого штока 62 в управляющем блоке 6 происходит ограничение подлежащих изменению углов колена при полностью распрямленном коленном суставе 1. Полностью распрямленный коленный сустав имеется тогда, когда нижняя часть 3 не может быть больше распрямлена, хотя еще и не достигнуто угловое положение 180°.
На фиг.8 показан альтернативный вариант выполнения, в котором упор выполнен независимо от выполненного, как правило, в виде гидравлического демпфирующего блока управляющего блока 6. Отдельный упор 7 приводит за счет перемещения с помощью электродвигателя гильзы к тому, что конечное разгибание достигается при различных углах колена. Сигналы управления электродвигателем 64, который образует перестановочное устройство, подаются из управляющего устройства 6, которое соединено с датчиками 8-10. В зависимости от определяемых датчиками данных, например, наклона верхней части 2 или нижней части 3, осевой нагрузки за счет наступания протезной или ортезной ступней 4 или угла колена, определяемого с помощью датчика 6 сгибания, устанавливаются различные положения упора, так что достигается улучшенное согласование с естественной походкой. На фиг.8 перестановка упорной гильзы 71 и упора 7 происходит в целом с помощью резьбы 72, которая соединена с электродвигателем 64.
Приведенные относительно показанных примеров выполнения протезного коленного сустава 1 выкладки справедливы, соответственно, также для ортезных коленных суставов, в которых максимальный угол распрямления также можно изменять в зависимости от данных датчиков.
Наряду с показанным вариантом выполнения перестановочного устройства 64 в виде электродвигателя, можно осуществлять также гидравлическую перестановку упора, как показано на фиг.7. Приведение в действие клапана 6 можно осуществлять как гидравлически, так и электромеханически, например, с помощью переключателя или переключаемого клапана. Могут быть также предусмотрены другие сенсорные устройства, которые могут подавать в управляющее устройство помимо указанных данных датчиков дополнительные данные. Внутри управляющего устройства 6, которое одновременно выполнено в качестве демпфирующего устройства, имеются вычислительные устройства, которые вычисляют соответствующую перестановку положения упора и выдают данные управления в перестановочное устройство.
Реферат
Группа изобретений относится к медицине. Ортопедический коленный сустав содержит верхнюю часть, на которой расположены верхние соединительные средства, установленную с возможностью поворота на верхней части нижнюю часть, соединительные средства для ортопедических компонентов и упор ограничения движения распрямления. Упор выполнен с возможностью перемещения и соединен с перестановочным устройством, которое связано с управляющим устройством для приведения в действие перестановочного устройства в зависимости от данных датчиков и изменения положения упора таким образом, что для ходьбы упор ограничения движения распрямления перемещается вперед, а при стоянии упор ограничения движения распрямления отодвигается назад. Способ управления ортопедическим коленным суставом содержит упор распрямления и перестановочное устройство, с помощью которого можно изменять положение упора распрямления. Положение упора распрямления изменяют в зависимости от данных датчиков таким образом, что для ходьбы упор ограничения движения распрямления перемещается вперед, а при стоянии упор ограничения движения распрямления отодвигается назад. Изобретения обеспечивают возможность удобной ходьбы и расслабленного стояния. 2 н. и 14 з.п. ф-лы, 8 ил.
Комментарии