Способ и устройство для управления ортезом или протезом сустава - RU2533967C2
Код документа: RU2533967C2
Чертежи




Описание
Изобретение относится к способу управления ортезом или протезом сустава нижней конечности с создающим сопротивление приспособлением, которое снабжено по меньшей мере одним исполнительным механизмом, с помощью которого изменяется сопротивление сгибанию и/или разгибанию в зависимости от данных датчиков, причем во время использования сустава с помощью датчиков обеспечивается информация состояния.
Рациональное обеспечение протезами гериатрических пациентов требует ориентации на потребности пациентов, соответствующую активность и медицинскую необходимость. Часто на переднем плане стоит потребность в безопасности, так что во время стояния желательно блокирование коленного сустава. Блокирование должно осуществляться по возможности в зависимости от нагрузки и в зависимости от угла и создавать в каждом положении стояния чувство стабильности, поскольку координационная способность, подвижность и физические силы таких пациентов могут быть часто ограничены.
Если пациент подвижен, то во время ходьбы в фазе стояния имеется большое сопротивление сгибанию, с целью предотвращения непреднамеренного сгибания, поскольку сгибание часто не может быть достаточно быстро компенсировано разгибанием бедра.
В противоположность этому, сидение требует небольшого сопротивления как в направлении разгибания, так и в направлении сгибания, для того чтобы пациент мог свободно двигаться.
Может быть также необходимым обеспечение инициирования маховой фазы, с целью делать хождение для пациента более приятным.
Искусственные суставы, в частности отрезы или протезы коленных суставов, имеют верхнюю соединительную часть и нижнюю соединительную часть, которые соединены друг с другом с помощью шарнирного приспособления. На верхней соединительной части расположена гильза для размещения культи бедра или шины бедра, в то время как на нижней соединительной части расположена ножка для голени или шина голени. В простейшем случае верхняя соединительная часть соединена с возможностью поворота с нижней соединительной частью с помощью одноосевого шарнира. Такая система является достаточной лишь в исключительных случаях для обеспечения желаемого успеха, например, поддержки при использовании ортеза или естественной походки при использовании в протезе.
Для максимально естественного выполнения различных требований во время различных фаз шага или других движений предусмотрены создающие сопротивление приспособления, которые обеспечивают сопротивление сгибанию или сопротивление разгибанию. С помощью сопротивления сгибанию устанавливается, насколько легко ножка голени или шина голени совершает маховое движение назад относительно гильзы бедра или шины бедра при приложении силы. Поэтому в коленном суставе с помощью сопротивления сгибанию устанавливается, насколько легко ножка голени или шина голени совершает маховое движение назад относительно гильзы бедра или шины бедра при приложении силы. Сопротивление разгибанию тормозит движение вперед ножки голени или шины голени и обеспечивает, среди прочего, упор для разгибания. В других типах суставов, таких как тазобедренный сустав или голеностопный сустав, эти соображения справедливы в соответствии с кинематическими условиями.
С помощью создающих сопротивление приспособлений можно согласовывать сопротивление сгибанию и/или сопротивление разгибанию с конкретным пользователем протеза или ортеза, или учитывать различные ситуации ходьбы или движения, с целью обеспечения согласованного с изменяющимися условиями сопротивления.
Из DE 10 2008 008 284 А1 известен ортопедический коленный сустав с верхней частью и расположенной на ней с возможностью поворота нижней частью, который снабжен несколькими датчиками, например датчиком угла сгибания, датчиком ускорения, датчиком наклона и/или датчиком силы. Упор для разгибания устанавливается в зависимости от получаемых данных датчиков.
В DE 10 2006 021 802 А1 приведено описание устройства управления пассивного протеза коленного сустава с регулируемым демпфированием в направлении сгибания для согласования протезного устройства с верхними соединительными средствами и соединительным элементом для искусственной ступни. Согласование осуществляется для поднимания по лестнице, при этом обнаруживается имеющее небольшой момент поднимание протеза ступни, и в фазе подъема демпфирование сгибания уменьшается ниже уровня, который подходит для ходьбы по плоскости. Демпфирование сгибания можно увеличивать в зависимости от изменения угла колена и в зависимости от воздействующей на голень осевой силы.
В DE 10 2007 053 389 А1 приведено описание способа и устройства для управления ортопедическим суставом нижней конечности по меньшей мере с одной степенью свободы с регулируемым исполнительным механизмом для согласования ортопедического устройства, которое имеет верхние соединительные средства и шарнирно установленный, расположенный дистально относительно соединительных средств ортопедический сустав, с ситуациями ходьбы, которые отклоняются от ходьбы по плоскости. При этом с помощью датчиков измеряется несколько параметров ортопедического устройства, измеренные параметры сравниваются с критериями, которые созданы на основании нескольких параметров и/или хода изменения параметров и введены в вычислительный блок, и выбирается критерий, который пригоден на основании определяемых параметров или изменения параметров. На основании выбранного критерия устанавливаются сопротивления разгибанию, величины движения, приводные силы и/или ход их изменения, с целью управления особыми функциями, которые отличаются от ходьбы по плоскости. Угол опрокидывания части ортопедического устройства в пространстве и/или ход изменения угла опрокидывания части ортопедического устройства можно использовать в качестве параметров.
Кроме того, из уровня техники известны так называемые коленные шарниры с тормозом, в которых механически увеличивается сопротивление сгибанию и сопротивление разгибанию при возрастающей осевой нагрузке. Это достигается в простейшем случае тем, что предусмотрены две тормозные поверхности, которые прижимаются друг к другу силой реакции грунта. Такое выполнение тормозного приспособления не применимо в современных протезах коленных суставов с управляемыми создающими сопротивление приспособлениями.
Предпочтительно, если коленные суставы во время ходьбы или во время стояния обеспечивают большое сопротивление, при этом сустав не полностью блокируется. При полностью распрямленном коленном суставе сгибание сустава предотвращается тем, что вектор силы лежит перед осью сустава и тем самым сустав отжимается к упору разгибания. Как только вектор силы перемещается за ось сустава, существует опасность подкашивания сустава. Поэтому необходимо в слегка согнутом положении также обеспечивать повышенное сопротивление. То, что сустав в слегка согнутом положении не полностью блокирован, имеет то преимущество, что пользователь сустава еще имеет возможности вмешательства в движение сустава. Если он, например, стоит на лестнице и теряет равновесие, то он может неконтролируемым образом упасть через блокированный сустав, в то время как сустав с большим сопротивлением сгибанию он может еще сгибать силой культи и тем самым уменьшать последствия падения или совсем предотвращать падение. Высокое демпфирование во время стояния также облегчает маневрирование суставом в узких местах или при усаживании. Когда сустав лишь обеспечивает большое сопротивление и не полностью блокирован, то невозможна нагрузка протеза, например, при стоянии на наклонных поверхностях, когда вектор силы реакции грунта смещается слишком далеко к пятке и тем самым не лежит больше перед осью колена, а позади оси колена и за счет этого сгибает колено. Стояние на согнутом колене также больше невозможно, поскольку за счет сгибания колена ось коленного сустава смещается перед вектором силы реакции грунта и за счет этого колено сгибается дальше.
Кроме того, из уровня техники известны устройства, в которых необходимо устанавливать особый режим для обеспечения блокированного стояния на наклонной поверхности или на согнутом колене. В таком режиме сустав не может сгибаться дальше устанавливаемого угла. Для продолжения ходьбы или для усаживания необходимо сознательно переходить в другой режим.
Задачей данного изобретения является создание способа и устройства, с помощью которых колено можно автоматически нагружать или блокировать в определенных ситуациях с помощью повышенного сопротивления, без необходимости сознательного включения или выключения режима.
Эта задача решена, согласно изобретению, с помощью способа, согласно главному пункту формулы изобретения, и устройства, согласно вспомогательному пункту формулы изобретения. Предпочтительные варианты выполнения и модификации изобретения указаны в зависимых пунктах формулы изобретения.
Способ, согласно изобретению, для управления искусственным ортезом или протезом сустава нижней конечности, который содержит создающее сопротивление устройство, которое снабжено по меньшей мере одним исполнительным механизмом, с помощью которого изменяется сопротивление сгибанию и/или сопротивление разгибанию в зависимости от данных датчиков, при этом во время использования сустава с помощью датчиков обеспечивается информация состояния, предусматривает, что сопротивление, исходя из исходного сопротивления, в фазе стояния или во время стояния повышают в зависимости от измеренной силы реакции грунта вплоть до блокирования сустава. После обнаружения фазы стояния или самого стояния при наличии задаваемой силы реакции грунта повышают сопротивление сустава вплоть до блокирования сустава, с целью автоматического перехода в безопасное или надежное состояние. Сопротивление можно непрерывно повышать в фазе стояния или во время стояния при увеличивающейся нагрузке, при этом повышение предпочтительно осуществляется лишь тогда, когда достигается или превышается пороговое значение, например, силы реакции грунта. При этом силу реакции грунта можно измерять непосредственно. Однако в большинстве случаев измеряют лишь имеющую значение составляющую силы реакции грунта, такую как, например, составляющая в направлении голени. Исходное сопротивление можно устанавливать так, что уровень, начиная с которого повышается сопротивление, и до которого оно при необходимости снова уменьшается, можно согласовывать с пациентом.
Для того чтобы состояние повышенного сопротивления сгибанию использовать лишь тогда, когда имеется опасность подкашивания коленного сустава, предусмотрено, что блокирование происходит лишь тогда, когда вектор силы реакции грунта проходит позади оси колена, так что при дальнейшей нагрузке в осевом направлении ноги с протезом происходило бы увеличивающееся сгибание. В зависимости от конструкции протеза или биопротеза это может происходить при различных углах сгибания. Особенно стабильно выполненные суставы, при которых вектор силы реакции грунта в разогнутом состоянии лежит далеко перед осью сустава, нагружаются повышенным сопротивлением при большом угле сустава, в то время как выполненные менее стабильными суставы требуют повышенного сопротивления уже раньше. Менее стабильная, а также менее надежная конструкция, например, за счет смещения вперед коленного сустава, обеспечивает пациенту преимущества, когда за счет управления предотвращается подкашивание коленного сустава и обеспечивается надежность протеза. При остальных одинаковых условиях, смещение вперед коленного сустава приводит к более быстрому и большому сгибанию колена при наступании на пятку и демпфирует удар. Кроме того, уменьшается сгибающий бедро момент для инициирования маховой фазы и для сгибания протеза в маховой фазе, что положительно сказывается на пациенте. Смещение вперед коленного сустава приводит также к уменьшению длины протеза в средней маховой фазе, что уменьшает опасность спотыкания пациента. Таким образом, сопротивление повышается также в зависимости от угла сустава или угла инерции компонента сустава, в частности, части голени и части бедра, поскольку также при вытянутом коленном суставе и стабильной конструкции при стоянии на наклонной плоскости вектор силы реакции грунта может лежать позади оси коленного сустава, что может приводить к подкашиванию коленного сустава. Угол инерции помогает, прежде всего, предотвращать блокирование во время сидения, т.е. при приблизительно горизонтальном бедре.
Сопротивление можно также повышать или блокировать в зависимости от расстояния силы реакции грунта до точки отсчета на одной соединительной части сустава или в зависимости от момента вокруг точки отсчета.
Для обеспечения возможности использования сустава после повышения сопротивления до блокирования для другой деятельности, отличной от стояния, предусмотрено, что сопротивление уменьшается в зависимости от угла инерции, изменения угла инерции и/или угловой скорости инерции одной соединительной части сустава, например, до исходного значения. Таким образом, обнаруживается, что одна часть сустава движется, например, что протез разгружается или пользователь перекатывается через протез вперед или назад. За счет этого распознается, что нет стояния, так что сопротивление должно быть уменьшено.
Под стоянием понимается, когда ступня протеза стоит на грунте, и носитель протеза не находится в движении вперед или назад. Осевая нагрузка или сила реакции грунта воздействует на протез и ступню протеза. Протез коленного сустава в большинстве случаев распрямлен, однако при этом с помощью данного изобретения возможно также стояние с согнутым коленом. Это зависящее от нагрузки поведение предпочтительно осуществлять в качестве функции. Функцию можно деблокировать или блокировать. Если она деблокирована, то она активируется всегда, когда выполняются определяемые с помощью датчиков критерии для повышения сопротивления. Если критерии больше не выполняются, то сустав может также переходить в другие состояния управления, такие как, например, управление маховой фазой. Если она блокирована, то она не может быть больше активирована. Однако другие состояния управления не зависят от этого. Управление можно также осуществлять в качестве режима.
Режим стояния является управляемым поведением, которое необходимо активировать отдельно. В отличие от функции стояния, которая имеется постоянно и проверяет, соблюдаются или нет критерии для функции стояния, с целью выполнения затем соответствующего согласования сопротивления или сопротивлений, режим, в данном изобретении режим стояния, активируется с помощью подлежащей осмысленному выполнению деятельности. Если способ осуществляется в качестве режима, то функция сустава ограничивается исключительно указанным поведением. Переход в другие состояния управления, такие как, например, управление маховой фазой, возможен лишь после осмысленной деактивации режима.
Возможно также, что повышение сопротивления совсем не инициируется, несмотря на наличие соответствующей силы реакции грунта и угла сустава, когда имеется инерциальная скорость одного компонента сустава, т.е. нет состояния стояния. Может быть также исключено блокирование сустава в зависимости от угла инерции, например, когда бедренная часть наклонена вперед в направлении ходьбы, т.е. проксимальный конец бедренной части в направлении ходьбы лежит перед дистальным концом бедренной части.
Для определения угла инерции одной соединительной части можно определять ее непосредственно или из угла инерции другой соединительной части в соединении с соответствующим углом сустава.
При разгрузке сустава, например, при поднимании ступни, может быть предусмотрен гистерезис, который приводит к уменьшению снова сопротивления при более низкой нагрузке, т.е. нагрузка должна быть значительно меньше порогового значения для вызывания уменьшения сопротивления.
Для уменьшения снова сопротивления при продолжении ходьбы или усаживании можно использовать угловую скорость инерции соединительной части, угол колена, угловую скорость колена, изменение расстояния вектора силы реакции грунта до одной соединительной части и/или изменение угла инерции одной соединительной части. Так, например, угол колена, угловая скорость колена и угловая скорость инерции хорошо подходят для распознавания ходьбы вперед. Кроме того, предусмотрено блокирование сгибания тогда, когда угловая скорость колена равна нулю или почти нулю, с целью обеспечения блокирования коленного сустава лишь во время состояния стояния. Это состояние может возникать, когда вектор силы лежит позади оси колена, пациент временно, пока не наступит блокирование сгибания, компенсирует сгибание бедром, так что момент колена и угловая скорость становятся равными нулю. Затем при стоянии за счет активирования блокирования колена момент колена может допускать сгибание, без подкашивания колена.
Расстояние вектора силы реакции грунта до одной соединительной части хорошо подходит для распознавания усаживания. При этом уменьшение сопротивления может осуществляться дискретно или непрерывно при превышении порогового значения для указанных параметров.
Уменьшение, так же как повышение сопротивления можно инициировать с помощью нескольких параметров, например нагрузки, угла колена и угла инерции, при этом имеются различные функции формы, с помощью которых за счет взаимосвязи нескольких условий определяется, увеличивать или уменьшать сопротивление и в какой степени. За счет этого обеспечивается мягкое блокирования и деблокирование сустава в зависимости от нескольких величин влияния.
Поскольку блокирование сустава при сидении иногда не желательно, например, для предотвращения блокированного коленного сустава или заклинивающегося сустава при управлении автомобилем, предусмотрено, что сопротивление повышается не до блокирования, когда бедренная часть приблизительно горизонтальна. Для этого определяется угол инерции бедренной части. Указанное выше повышение сопротивления вплоть до блокирования сустава может быть частью общего управления суставом, однако возможно также, что оно является единственной функцией сустава. При этом оно может образовывать подлежащий осмысленному активированию режим, который можно активировать или деактивировать с помощью регулировочного устройства. Возможно также, что эта функция присутствует постоянно, так что во время фазы стояния или во время стояния в обычной программе управления коленным суставом всегда имеется эта функция, когда выполняются предпосылки для блокирования сустава.
Устройство для выполнения указанного выше способа содержит регулируемое создающее сопротивление приспособление, которое расположено между двумя шарнирно установленными компонентами искусственного ортеза или протеза сустава, которое имеет управляющий блок и датчики, которые измеряют информацию состояния устройства. Кроме того, предусмотрено регулировочное приспособление, которое предназначено для активирования или деактивирования зависящего от нагрузки изменения сопротивления.
Ниже приводится более подробное пояснение примеров выполнения изобретения со ссылками на прилагаемые чертежи, на которых схематично изображено:
Фиг.1 - ход изменения сопротивления;
Фиг.2 - критерии для управления изменением сопротивления;
Фиг.3 - протез;
Фиг.4 - схема вычисления расстояния;
Фиг.5 - схема вычисления расстояния на основании показаний нескольких датчиков; и
Фиг.6 - принятое обозначение углов.
На Фиг.1 показан ход изменения сопротивления R в зависимости от нагрузки, представленной силой GRF реакции грунта. В фазе стояния или во время стояния устанавливается нормальное сопротивление Rstance фазы стояния, с целью получения во время ходьбы возможно более естественной походки с протезом или биопротезом. При превышении порогового значения силы GRF реакции грунта сопротивление R повышается, при этом во время фазы стояния при увеличении нагрузки за счет силы GRF реакции грунта происходит непрерывно повышение сопротивления R до достижения сопротивления Rblock блокирования. Это сопротивление Rblock блокирования эффективно предотвращает сгибание коленного сустава, однако предпочтительно имеет такую величину, что не происходит механического повреждения при превышении предела нагрузки отдельных компонентов протеза или биопротеза. Если затем сила GRF реакции грунта снова уменьшается, то предусмотрено, что сопротивление снова уменьшается от значения сопротивления Rblock блокирования тогда, когда нагрузка уменьшается ниже порогового значения, которое достигается для инициирования повышения сопротивления. После уменьшения нагрузки ниже этого порогового значения, сопротивление R затем уменьшается до нормального уровня фазы стояния до достижения сопротивления Rstance фазы стояния.
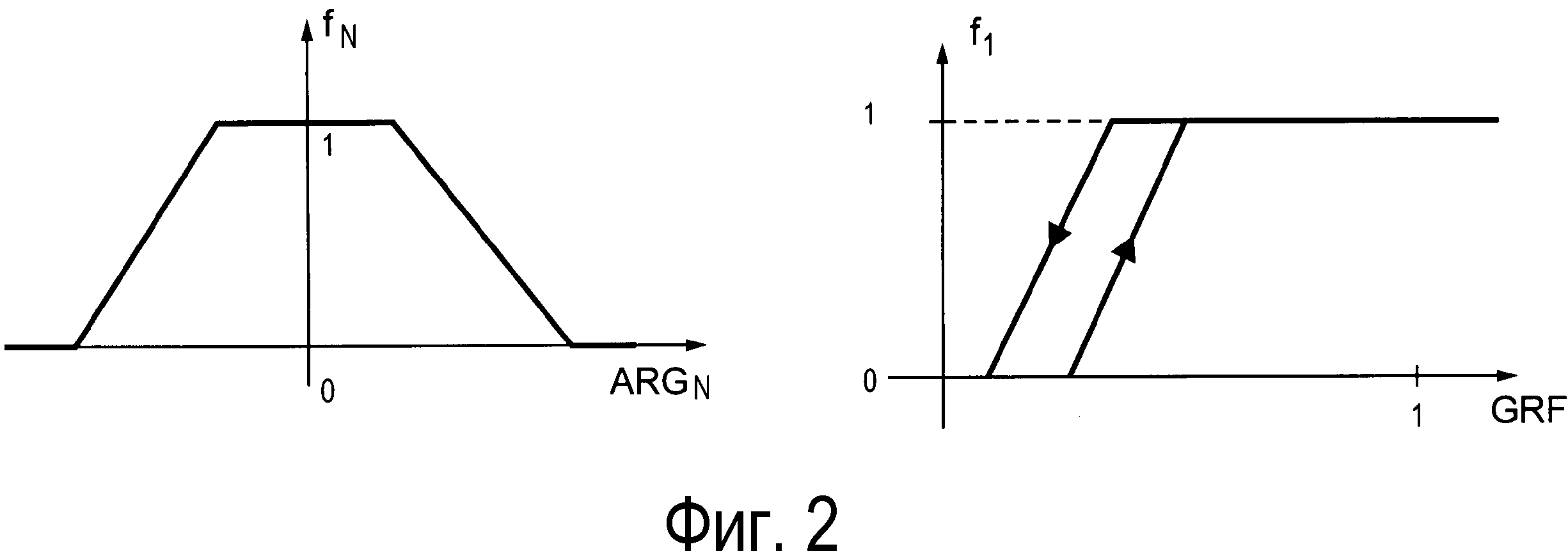
Способ определения подлежащего установке сопротивления может быть различным, на Фиг.2 показаны функции формы, которые можно использовать в качестве факторов для вычисления сопротивления R. При этом правая кривая показывает функцию для нагрузки за счет силы GRF реакции грунта, которая нормирована. Левая кривая показывает, как при вычислении номинального сопротивления можно использовать другие функции fN. В качестве аргументов для этих функций могут служить показания для движения сустава, такие как угловая скорость колена, угловая скорость инерции, отклонение расстояния силы реакции грунта от одной части сустава с момента времени образования блокирования или отклонение угла инерции сустава от момента блокирования. Все функции f1-fN можно за счет умножения связывать с номинальным значением сопротивления, например, посредством взвешивания разницы сопротивления фазы стояния и сопротивления блокирования, и тем самым определения, на какое значение повышать сопротивление Rstance фазы стояния. Максимальное значение сопротивление Rblock блокирования, уменьшенное на величину нормального сопротивления Rstance фазы стояния, перемножается с обоими аргументами f1 и fN. Если эта функции равна нулю, то сопротивление Rstance фазы стояния остается неизменным, если все функции f1-fN больше 0, то сопротивление Rstance фазы стояния повышается, когда функции становятся меньше, то уменьшается повышенное сопротивление. Поэтому сопротивление R вычисляется по формуле:
R = Rstance+(Rblock-Rstance)*f1(ARG1)*f2(ARG2)*…+fN(ARGN).
После уменьшения сопротивления после активирования блокирования можно также применять набор функций fN, который отличается от набора, используемого для активирования блокирования.
На Фиг.3 схематично показан ножной протез с гильзой 1 для размещения культи бедра. Гильза 1 для бедра называется также верхней соединительной частью. На верхней соединительной части 1 расположена нижняя соединительная часть 2 в виде ножки голени с создающим сопротивление приспособлением. На нижней соединительной части 2 расположен протез 3 ступни. Нижняя соединительная часть 2 закреплена с возможностью поворота на верхней соединительной части 1 с помощью шарнира 4. В шарнире 4 расположен датчик момента, который определяет действующий момент колена. В нижней соединительной части 2 предусмотрена соединительная часть 5 для протеза 3 ступни, в которой расположено приспособление для определения действующей осевой силы, а также момента лодыжки. Возможно, что не все датчики имеются в ножном протезе, можно отказаться от датчика момента лодыжки или датчика момента колена.
В нижней соединительной части 2 находится, наряду с создающим сопротивление приспособлением, которое обеспечивает сопротивление сгибанию и сопротивление разгибанию, вычислительный блок, с помощью которого можно изменять соответствующее сопротивление на основании принимаемых данных датчиков и оценки данных датчиков, посредством активирования исполнительного механизма в соответствии с оценкой и регулирования создающего сопротивление приспособления так, что имеется желаемое или требуемое сопротивление в направлении разгибания и/или сгибания. Для этого может быть предусмотрено, что данные датчиков применяются для создания по меньшей мере одной вспомогательной переменной, которая получается посредством математической связи двух или более данных датчиков. За счет этого можно связывать друг с другом несколько датчиков силы или момента, с целью вычисления сил, расстояний и/или моментов, которые не присутствуют непосредственно в зоне датчиков. Так, например, можно вычислять внутренние силы, внутренние моменты или расстояния в определенных плоскостях отсчета, с целью обеспечения возможности, исходя из этого, оценки, какие функции необходимо выполнять в данный момент времени для достижения возможно более естественной походки. При этом функциями называются те процессы управления, которые возникают в рамках естественного движения, в противоположность этому, режим является состоянием управления, которое устанавливается с помощью произвольного действия, например, посредством приведения в действие особого переключателя или за счет осмысленной, возможно осмысленно не естественной последовательности движений.
На Фиг.4 схематично показано, как в качестве аргумента применяется расстояние а вектора силы GRF реакции грунта до оси колена. Расстояние а вычисляется из частного момента М колена и осевой силы FAX. Чем больше момент М колена относительно осевой силы FAX, тем больше расстояние а вектора силы GRF реакции грунта на высоте отсчета, которую в данном случае образует ось колена. На основании аргумента а можно изменять сопротивление разгибанию и/или сопротивление сгибанию, поскольку с помощью аргумента можно вычислять, имеется ли стояние или стояние прервано, так что, исходя из этого, устанавливается заранее заданное сопротивление сгибанию и/или сопротивление разгибанию. За счет изменения аргумента а можно определять, как проходит движение в данный момент времени, так что внутри фазы стояния или маховой фазы может происходить согласование сопротивления разгибанию и/или сопротивления сгибанию. Изменение сопротивлений происходит предпочтительно непрерывно и в зависимости от изменения аргумента или аргументов.
На Фиг.5 показано, как вычисляется аргумент b в виде расстояния вектора силы GRF реакции грунта на высоте отсчета до линии соединения датчиков момента. Аргумент b вычисляется по формуле:
b = [M1+{(M2-M1)/(l2-l1)}*(x-l1)]/FAX,
где М1 является действующим моментом в соединительной части 5, как правило, моментом лодыжки на высоте l1 от пола, М2 является моментом колена на высоте оси 4 колена, которая лежит на расстоянии l2 от пола. Величина х представляет высоту отсчета, FAX является действующей внутри соединительной части 5, соответственно, в нижней соединительной части 2 осевой силой. За счет изменения аргумента b можно, как указывалось выше, непрерывно регулировать как во время маховой фазы, так и во время фазы стояния соответствующие сопротивления и согласовывать с имеющимися изменениями. За счет этого можно активировать различные функции, которые распознаются автоматически, например функцию стояния, за счет которой, например, предотвращается непреднамеренное подкашивание коленного сустава.
Повышение сопротивления, в частности, сопротивления сгибанию во время фазы стояния или во время стояния можно осуществлять в качестве постоянной функции, которая всегда имеется в распоряжении. Если пациент находится в фазе стояния или стоит, то автоматически повышается сопротивление сгибанию вплоть до блокирования сустава, в частности коленного сустава. При этом учитывается также угол колена. Например, если колено находится в вытянутом положении, то на основании, как правило, стабильной конструкции нет необходимости в блокировании движения сгибания. Однако если коленный сустав находится в слегка согнутом положении, например, больше чем на 4° между продольным направлением голенной части и бедренной части, и затем к этому добавляется еще нагрузка со стороны силы реакции грунта, то коленный сустав автоматически блокируется, поскольку можно предполагать, что несмотря на сгиб колена сгибание не желательно.
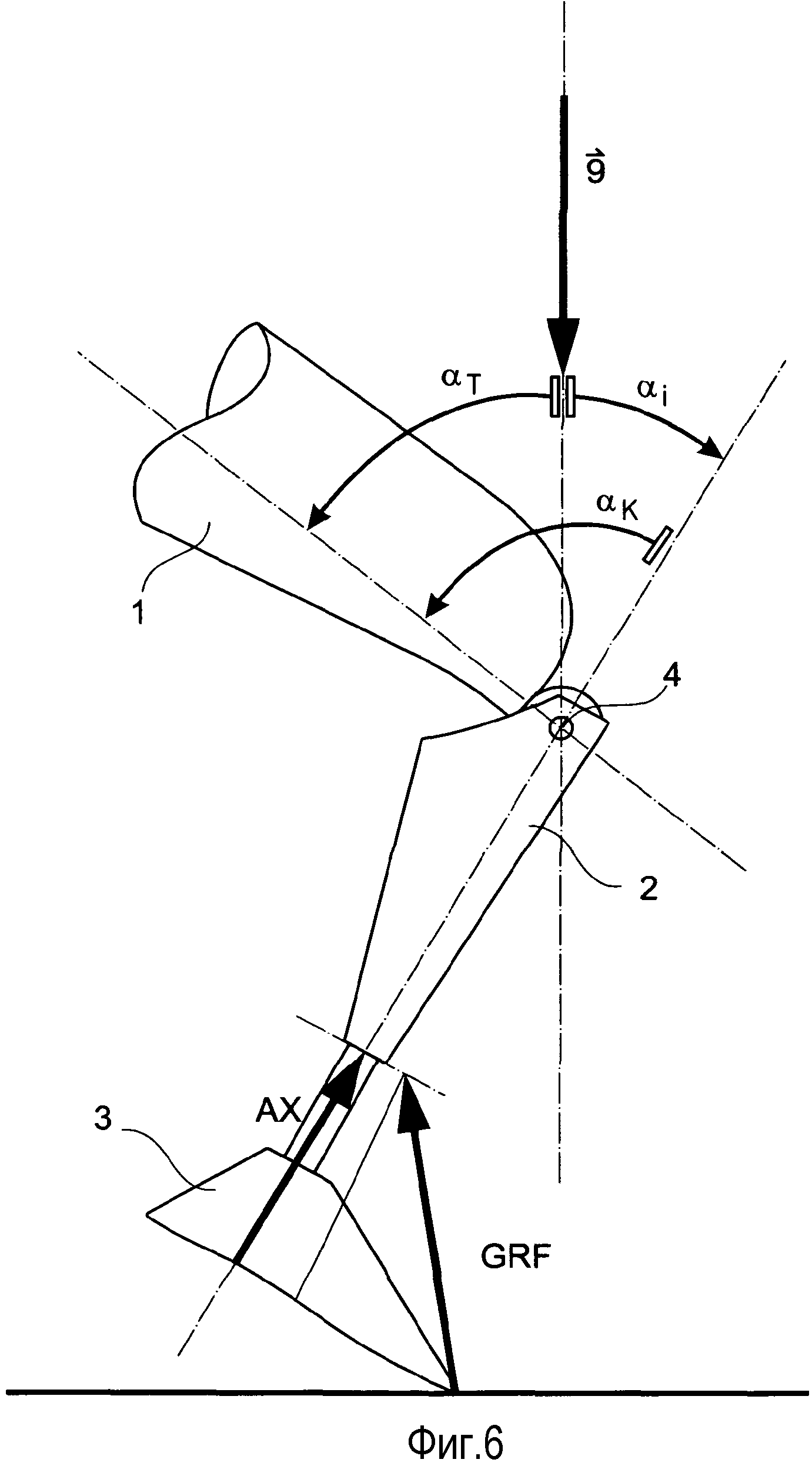
На Фиг.6 схематично показан протез в сидячем положении. Если пользователь протеза находится в сидячем положении, то приятно, когда сопротивление разгибанию и сопротивление сгибанию являются небольшими, так что выполняемые во время сидения движения, которые, как правило, имеют небольшую величину, можно выполнять беспрепятственно.
Для обеспечения возможности автоматического выполнения изменений сопротивления и определения состояния предусмотрено, что измеряются угол αТ инерции и/или угол αК колена. Угол αТ инерции бедренной части 1 измеряется относительно вертикали, которая проходит в направлении действия силы тяжести. На Фиг.6 это показано с помощью вектора g силы тяжести. В качестве исходной величины для угла αТ инерции принята продольная ось бедренной части 1, которая проходит через поворотную ось 4 коленного сустава коленного сустава. При этом продольная ось приблизительно соответствует ориентации естественной бедренной кости и проходит по существу посредине бедренной части 1, которая, как правило, выполнена в виде гильзы для бедра.
Угол αК колена лежит между продольным направлением голенной части 2 и продольным направлением бедренной части 1. В этом случае продольное направление голенной части 2 также проходит через шарнирную ось 4 коленного сустава протеза. Угол αК колена можно вычислять из угла αТ инерции бедренной части 1 и угла αi инерции голенной части 2, при этом на основе вычисления угла αТ инерции и угла αi инерции, исходя из вектора g силы тяжести, можно вводить соответствующий знак, так что угол αТ инерции бедренной части 1 получается из разницы между углом αК колена и углом αi инерции голенной части 2.
Затем определяется сила GRF реакции грунта, соответственно, осевая сила АХ, которая действует в продольном направлении голенной части 2, с целью принятия на основании имеющихся сил решения о нахождении пользователя протеза в сидячем или стоячем положении.
Как правило, сила GRF реакции грунта значительно уменьшается, когда пользователь протеза сидит. Таким образом, если сила GRF реакции грунта находится ниже порогового значения, то это является фактором для оценки, что имеется состояние сидения. Если измеряется большая сила GRF реакции грунта, то можно делать вывод о стоячем положении, а также о вставании, в обоих случаях целесообразно повышение сопротивления сгибанию, с целью предотвращения непреднамеренного опускания или подкашивания при большой силе GRF реакции грунта.
Внезапное повышение сопротивления после достижения определенного порогового значения часто воспринимается как неприятное. Поэтому предусмотрено, что сопротивление после достижения порогового значения для силы GRF реакции грунта повышается постепенно. Обычно выполняется повышение сопротивления между 20% и 30% веса тела, уменьшение - между 20% и 10% веса тела. Однако, если имеется слишком большой угол αК колена или угол αТ инерции или шарнир 4 движется, то можно исходить из того, что нет ситуации стояния, так что можно осуществлять уменьшение сопротивления, возможно, вплоть до исходного сопротивления. Если бедренная часть 1 находится в наклонном положении, т.е. по существу в горизонтальном положении, так что угол αТ инерции находится, например, между 70º и 110°, то повышение сопротивления должно быть исключено. По истечении заданного времени можно осуществлять даже уменьшение сопротивления создающего сопротивление приспособления ниже сопротивления фазы стояния, поскольку в этом случае можно предполагать, что пользователь протеза сидит.
Для определения угловой скорость инерции определяется изменение угла αi инерции во времени, так что получается угловая скорость ωI, которую можно определять по величине и направлению. Если имеется определенный угол αi инерции и определенная угловая скорость ωI инерции, то можно исходить из того, что имеется ситуация движения, т.е. не ситуация стояния, в которой следовало бы выполнять запирание или блокирование коленного сустава.
В данном способе предусмотрено, что тотчас после нагрузки, которая превышает определенное пороговое значение, без задержки происходит блокирование, так что нет необходимости в инициировании особого активирования повышения сопротивления с помощью особых движений, которые не соответствуют нормальному ходу движения. С помощью силы GRF реакции грунта обеспечивается сигнал нагрузки, который представляет величину нагрузки, при этом сила GRF реакции грунта достаточна для активирования функции стояния. Другие величины, такие как моменты или углы инерции, можно использовать дополнительно, т.е. для подтверждения решения о наличии действительно состояния стояния или фазы стояния. С помощью предлагаемого способа можно блокировать колено или другой сустав в согнутом положении или при воздействии сгибающих сил, при этом блокирование предпочтительно начинается лишь при слегка согнутом колене, например, начиная с угла сгиба колена 4° в качестве угла колена.
Реферат
Группа изобретений относится к медицине. Устройство для осуществления способа управления искусственным ортезом или протезом сустава нижней конечности содержит регулируемое создающее сопротивление приспособление, которое расположено между двумя установленными шарнирно относительно друг друга компонентами искусственного ортеза или протеза коленного сустава, управляющий блок и датчики для получения информации о состоянии устройства. В устройстве предусмотрено регулировочное приспособление, и с помощью этого регулировочного приспособления обеспечивается возможность активирования и/или деактивирования изменения сопротивления в зависимости от нагрузки. При осуществлении способа с помощью датчиков обеспечивается информация состояния. Сопротивление сгибанию в фазе стояния или во время стояния повышают от исходного значения в зависимости от силы реакции грунта вплоть до блокирования сустава. При этом сопротивление после повышения уменьшают в зависимости от угла инерции. Группа изобретений обеспечивает ответную реакцию на усилие реакции опоры регулирования сгибания и/или разгибания более точным образом с большим количеством настроек для обеспечения улучшенной походки пользователя, а также позволяет избежать состояния блокирования, даже если усилие реакции опоры находится на том же уровне, за счет использования угла инерции. 2 н. и 9 з.п. ф-лы, 6 ил.
Формула
Документы, цитированные в отчёте о поиске
Искусственный коленный сустав с регулированием сил подтормаживания раздельно при сгибании и разгибании
Комментарии