Способ управления амортизацией фазы остановки искусственного коленного сустава - RU2715683C2
Код документа: RU2715683C2
Чертежи

Описание
Изобретение относится к способу управления амортизацией фазы остановки искусственного коленного сустава с верхней частью и нижней частью, которые закреплены друг на друге с возможностью поворота вокруг оси поворота, блоком сопротивления, который расположен между верхней частью и нижней частью и имеет регулировочное устройство, при помощи которого может изменяться сопротивление амортизации, и с блоком управления, который согласован с регулировочным устройством, и который соединен, по меньшей мере, с одним датчиком, причем регулировка осуществляется на основе данных датчика.
Коленные суставы для ортезов, экзоскелетов или протезов имеют верхнюю часть с верхним соединительным элементом и нижнюю часть с нижним соединительным элементом, которые шарнирно друг с другом соединены. На верхнем соединительном элементе, как правило, расположены захваты для культи бедра или шина бедра, в то время как на нижнем соединительном элементе расположена труба голени или шина голени. В самом простом случае верхняя часть и нижняя часть соединены друг с другом с возможностью поворота на одноосном шарнире.
Для того чтобы была возможность наиболее естественно воспроизводить или поддерживать различные требования во время различных фаз одного шага или при других движениях или операциях, зачатую предусмотрено устройство сопротивления, которое предоставляет сопротивление сгибания и сопротивление разгибания. Посредством сопротивления сгибания устанавливается, насколько легко нижнюю часть можно поворачивать назад относительно верхней части при приложенном усилии. Сопротивление разгибания замедляет движение нижней части вперед и образует среди прочего упор разгибания.
Из DE 10 2008 008 284 A1 известен ортопедический коленный сустав с верхней частью и расположенной на ней с возможностью поворота нижней частью, с которым согласованы несколько датчиков, например, датчик угла сгибания, датчик ускорения, датчик наклона и/или датчик усилия. В зависимости от данных датчиков определяется положение для упора разгибания.
DE 10 2006 021 802 A1 описывает управление пассивным коленным суставом протеза, включающее в себя регулируемую амортизацию в направлении сгибания для адаптации устройства протеза с расположенными с верхней стороны соединительными средствами и соединительным элементом для искусственной стопы. Адаптация осуществляется к подъему по лестнице, причем обнаруживается происходящее при низком моменте поднятие стопы протеза, и амортизация сгибания понижается во время фазы поднятия ниже уровня, который подходит для ходьбы по плоскости. Амортизация сгибания может увеличиваться в зависимости от изменения угла сгибания колена и в зависимости от действующего на голень осевого усилия.
DE 10 2009 052 887 A1 описывает среди прочего способ управления суставом ортеза или протеза при помощи устройства сопротивления и датчиков, причем датчиками во время использования сустава предоставляются данные о состоянии. Датчики регистрируют моменты или усилия, причем данные датчиков, по меньшей мере, двух из установленных параметров увязываются друг с другом посредством математической операции, и вследствие этого рассчитывается вспомогательная переменная, которая берется за основу управления сопротивлением сгибания и/или разгибания.
Для управления изменением характера амортизации данные датчиков согласно уровню техники количественно оцениваются, то есть, как правило, задаются определенные пороговые значения, при достижении или недостижении которых активируется или деактивируется привод, так что устройство сопротивления предоставляет повышенное или пониженное сопротивление сгибания или разгибания.
Пациенты могут использовать протезы, экзоскелеты или ортезы при различных окружающих условиях. Они могут спускаться по лестницам, проходить вниз по склонам или ходить по плоскости с различными скоростями. Кроме того, пациентами могут переноситься грузы, что также сказывается на поведении протеза или ортеза. В частности, после окончания фазы маха, то есть после касания земли экипированной ногой, когда вес тела переносится на экипированную ногу, существует для пациента постоянная потребность в повышенной безопасности. Однако слишком высокая начальная амортизация сгибания, то есть амортизация, которая препятствует сгибанию искусственного коленного сустава, привела бы к ударной нагрузке в тазобедренном суставе, что повлекло бы за собой уменьшение комфорта ношения и принятия протеза или ортеза.
Задача данного изобретения предоставить способ управления искусственным коленным суставом, в частности изменением амортизации внутри искусственного коленного сустава, при помощи которого может достигаться адаптация к различным ситуациям во время ходьбы и комфортный характер ходьбы при одновременной максимальной безопасности.
Согласно изобретению эта задача решается с помощью способа с признаками основного независимого пункта формулы изобретения. Предпочтительные варианты осуществления и усовершенствования изобретения раскрыты в зависимых пунктах формулы изобретения, описании, а также на чертеже.
Способ управления амортизацией фазы остановки искусственного коленного сустава с верхней частью и нижней частью, которые закреплены друг на друге с возможностью поворота вокруг оси поворота, блоком сопротивления, который расположен между верхней частью и нижней частью и имеет регулировочное устройство, при помощи которого может изменяться сопротивление амортизации, и с блоком управления, который согласован с регулировочным устройством, и который соединен, по меньшей мере, с одним датчиком, причем регулировка осуществляется на основе данных датчика, предусматривает, что во время сгибания фазы остановки вплоть до конечной фазы остановки регистрируется, по меньшей мере, одним датчиком угол колена, и амортизация сгибания поднимается до уровня выше начальной амортизации сгибания вплоть до предотвращения дальнейшего сгибания при достижении заданного максимального угла колена. После окончания фазы маха сопротивление амортизации, по существу сопротивление сгибания, устанавливается на уровень, который подходит для предоставления достаточной амортизации при контакте пяткой. Уровнем является в этом случае уровень начальной амортизации сгибания. В дальнейшем ходе фазы остановки угол колена повышается, так как из-за контакта пяткой возникает импульсное усилие реакции земли, и благодаря приложению усилия вместе с движением тела вперед вызывается крутящий момент вокруг оси поворота. Неэкипированная (протезом) нога смягчила бы удар пяткой мышечными сокращениями, при экипированной же ноге это вызывается блоком сопротивления с начальной амортизацией сгибания. При начальном контакте земли или ударе пяткой достигается угол сгибания или угол колена приблизительно в 5°. При следующей фазе движения, реакции нагрузки, нагрузка на ногу усиливается весом тела, что приводит к дальнейшему сгибанию или дестабилизации коленного сустава. Неэкипированная нога остановит дальнейшее сгибание напряжением разгибательной мускулатуры ноги. В соответствии с изобретением предусмотрено, что после начального контакта земли или удара пяткой амортизация сгибания поднимается до уровня выше начальной амортизации сгибания, который достаточен, для того чтобы блокировать дальнейшее сгибание при достижении заданного максимального угла колена. Максимально достигаемый угол колена задается заранее, при ходьбе по наклонным поверхностям или по горизонтальной плоскости максимальный угол колена находится в диапазоне между 7° и 12°. Изменение амортизации сгибания происходит таким образом в том, что амортизация сгибания при увеличивающемся угле колена, причем максимально разогнутое положение имеет угол колена равный 0°, контролируется на предмет того, увеличивается ли и как увеличивается угол колена. Если угол колена приближается к заданному максимальному углу колена, то амортизация сгибания повышается, предпочтительно происходит прогрессивное повышение, то есть сначала медленное повышение амортизации сгибания, для того чтобы затем незадолго перед достижением заданного максимального угла колена амортизацию сгибания повышать настолько, что дальнейшее сгибание не может происходить, следовательно, вызывается блокировка сгибания. Блок сопротивления, который может быть выполнен, например, в виде гидравлического, пневматического, электрического или механического блока сопротивления или тормоза, блокируется. У гидравлических или пневматических блоков сопротивления закрываются перепускные каналы, так что никакая среда больше не может перетекать из камеры разгибания в камеру сгибания. У механических блоков сопротивления, например, трение повышается настолько, что дальнейшее сгибание не может происходить, то же самое относится к приводимым в действие электрически блокам сопротивления. Способ предусмотрен для управления как протезами, так и ортезами и экзоскелетами. Если в дальнейшем говорится об ортезах, то исполнения относятся также к особой форме ортеза в виде экзоскелета. Датчик или датчики регистрируют измеряемые величины в течение всей фазы остановки, то есть от момента первого контакта стопы или части стопы с землей, начального контакта земли, удара пяткой или "Heel Strike" до конечной фазы остановки, на которой достигнуто полное разгибание коленного сустава, и коленный сустав благодаря сопротивлению дорсальному разгибанию и положению вектора усилия перед осью колена удерживается в разогнутом положении. После конечной фазы остановки, на так называемой фазе перед махом, подготавливается фаза маха, при здоровой ноге имеет место пассивное сгибание коленного сустава, тем не менее пальцы стопы еще не оторваны от земли.
Усовершенствование изобретения предусматривает то, что амортизация сгибания удерживается на уровне, который прилегает при достижении максимального угла колена. Вследствие этого обеспечивается повышенная степень безопасности, так что искусственный коленный сустав не ослабевает в дальнейшем течении ходьбы. При ходьбе по горизонтальной плоскости за относительным максимумом следует уменьшение угла колена, то есть разгибание, которое продолжается до конечной фазы остановки. На этой фазе угол колена уменьшается до полного разгибания. Удержание амортизации сгибания на уровне максимального угла колена во время реакции нагрузки представляет собой таким образом повышение безопасности, без того чтобы при этом оказывалось бы отрицательное воздействие на ходьбу по горизонтальной плоскости.
Амортизация сгибания может сохраняться постоянной во время начального контакта пяткой и повышаться в зависимости от нагрузки. Повышение происходит предпочтительно только после достижения так называемой реакции нагрузки, фазы ходьбы, на которой стопа имеет полный контакт с землей, и вектор усилия после начального удара пяткой перемещается за ось колена, вследствие чего вызывается сгибание колена, и у здоровой ноги активируется передняя мышца бедра для амортизации сгибания. У искусственного коленного сустава амортизация сгибания повышается в зависимости от нагрузки после удара пяткой, при большой нагрузке повышается больше, чем при низкой нагрузке.
Усовершенствование изобретения предусматривает то, что регистрируется поворот нижней части вперед, то есть трубы голени у протеза или шины голени у ортеза, вокруг дистальной точки поворота, предпочтительно регистрируется датчиками. Выявляется или обнаруживается движение голени вокруг голеностопного сустава или вокруг фиктивной точки поворота в области земли, для того чтобы могли делаться выводы о дальнейшем характере движения. При продолжаемом повороте вперед после достижения максимального угла колена амортизация сгибания может затем уменьшаться, для того чтобы во время конечной фазы остановки или фазы перед махом делать возможным достаточно легкое сгибание коленного сустава, чтобы мог просто происходить отрыв пальцев от земли. Продолжающийся поворот вперед даже при неуменьшении угла колена может происходить, например, при ходьбе вниз по наклонным поверхностям или лестницам, если дальнейший поворот голени вперед имеет место благодаря дальнейшему перекатыванию вокруг пятки или вокруг точки поворота на краю ступени лестницы, что может обнаруживаться, например, отдельным датчиком, например инерциальным датчиком угла. Также этот датчик соединен с блоком управления, который согласован с регулировочным устройством и адаптирует сопротивление сгибания.
Амортизация сгибания может уменьшаться после превышения заданного диапазона поворота вперед и/или при уменьшающемся угле колена. Диапазон поворота вперед может включаться в себя, например, заданный угловой диапазон, в котором нижняя часть должна выполнять поворот вперед вокруг дистальной точки поворота. Если обнаруживаются, например от 5° до 10° поворота вперед, то система управления предполагает, что либо при ходьбе по горизонтальной плоскости, либо при попеременной ходьбе вниз по наклонным поверхностям и/или лестницам произошло дальнейшее движение вперед, и необходимо уменьшение амортизации сгибания. Уменьшение амортизации сгибания на основе контроля заданного диапазона поворота вперед может использоваться отдельно или в комбинации с обнаружением уменьшающегося угла колена.
Амортизация сгибания может после установления максимальной амортизации сгибания начальной фазы остановки уменьшаться до значения, большего или равного начальной амортизации сгибания фазы остановки. Вследствие этого, например, при ходьбе вниз по наклонным поверхностям или лестницам также обеспечивается повышенный уровень безопасности против вынужденного сгибания.
Усовершенствование изобретения предусматривает, что после достижения заданного максимального угла колена и поворота нижней части вперед амортизация сгибания уменьшается. Если при ходьбе, в частности при ходьбе вниз по наклонным поверхностям или плоскостям, достигается максимальный угол колена, который устанавливается или задается для пациента, и сверх этого происходит поворот нижней части вперед, который обнаруживается, например инерциальным датчиком угла или датчиком угла голеностопного сустава, то согласно изобретению амортизация сгибания уменьшается, для того чтобы обеспечивать дальнейшее сгибание коленного сустава и тем самым равномерную ходьбу и естественную походку.
Максимальный угол колена может выбираться и задаваться из диапазона между 7° и 12° или из диапазона между 9° и 11°, частое значение для максимального угла колена составляет 10°. Это - примерно половина того угла колена, который достигается неэкипированной ногой в качестве сгибания во время реакции нагрузки.
Максимальный угол колена может также задаваться на основе статистических анализов зарегистрированных углов колена для ходьбы по горизонтальной плоскости, причем статистические анализы могут выполняться в блоке управления искусственного коленного сустава. Вследствие этого создаются условия для того, что максимальный угол колена может задаваться индивидуально для соответствующего пользователя искусственного коленного сустава.
Способ подходит для управления амортизацией фазы остановки в частности при ходьбе по горизонтальной плоскости, а также при ходьбе вниз по наклонным поверхностям, отдельная ситуация спуска по лестнице требует другого управления.
Блок сопротивления может быть выполнен, например, в виде привода, например, в виде гидравлического, пневматического, магнитореологического, магнитного, электрического, механического или электромагнитного блока сопротивления. У гидравлических или пневматических блоков сопротивления закрываются перепускные каналы, так что по этим перепускным каналам никакая среда больше не может перетекать из камеры разгибания в камеру сгибания. Таким образом, поток среды между камерой разгибания и камерой сгибания может при необходимости также полностью блокироваться. У механических блоков сопротивления, например, трение повышается настолько, что дальнейшее сгибание не может происходить. То же самое относится к приводимым в действие электрически блокам сопротивления.
Также могут использоваться приводы, которые и активно вводят энергию в систему, и наоборот выводят энергию из системы и таким образом действуют в качестве блока сопротивления. Приводы могут быть выполнены, например, в виде электродвигателей, гидравлических или пневматических насосов или пьезоэлектрических элементов.
Далее пример осуществления изобретения разъясняется более подробно при помощи приложенного чертежа. На чертеже показаны:
фиг. 1 - схематичное изображение протеза ноги; и
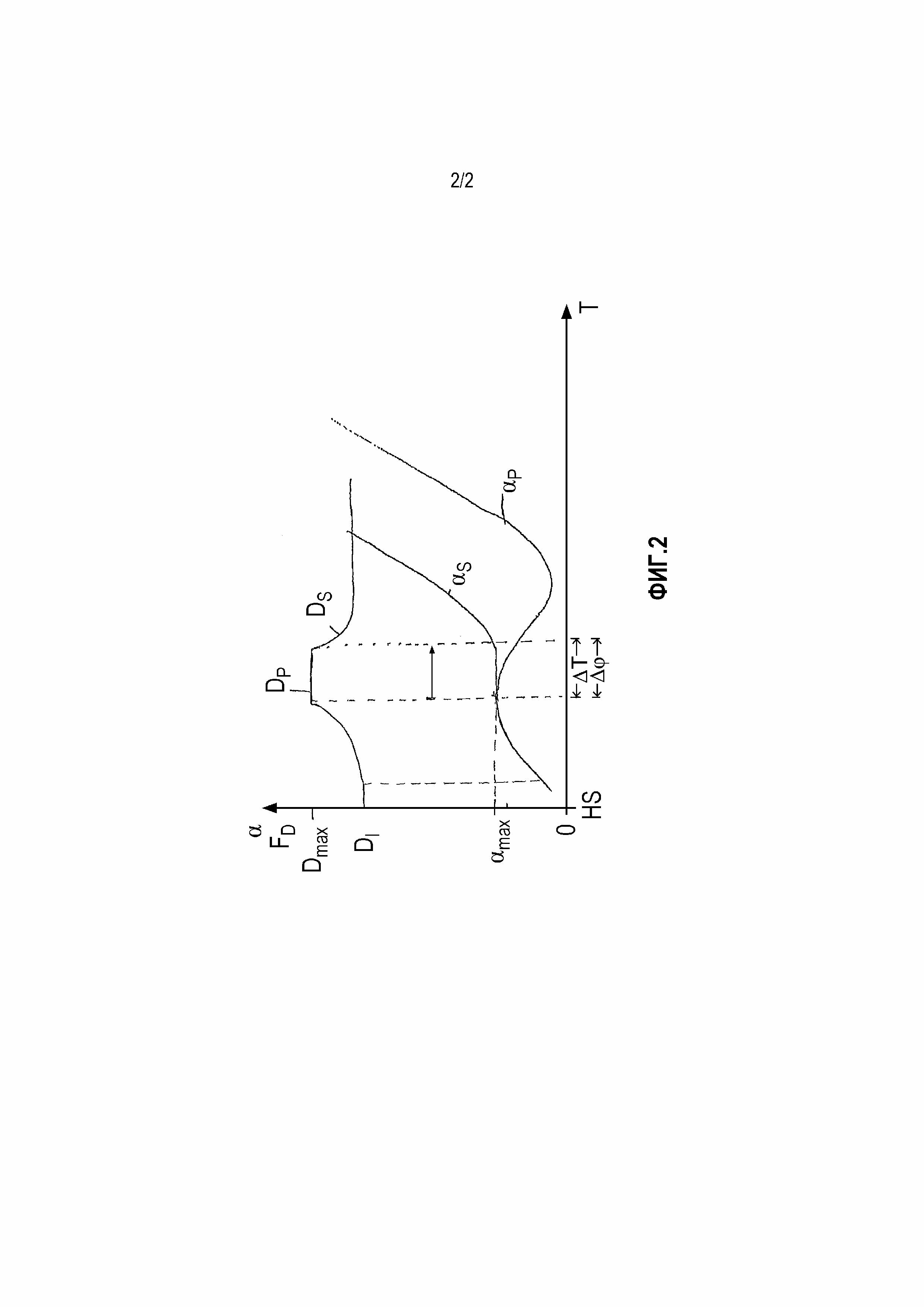
фиг. 2 - изображение диаграммы управления.
На фиг. 1 показан на схематичном изображении протез ноги с верхней частью 1, на которой закреплена бедренная гильза 10 для приема культи бедра. На верхней части 1 расположена с возможностью поворота нижняя часть 2 в виде части голени. Нижняя часть 2 установлена на верхней части 1 с возможностью поворота вокруг оси 4 поворота. Нижняя часть 2 имеет трубу 5 голени, на дистальном конце которой закреплена стопа 3 протеза, в которой может быть размещено устройство для определения действующего на трубу 5 голени осевого усилия, а также момента лодыжки, который действует вокруг места закрепления стопы 3 протеза на трубе 5 голени.
В или на нижней части 2 расположено устройство 6 сопротивления, которое может быть выполнено, например, в виде амортизатора или привода, и которое поддерживается между верхней частью 1 и нижней частью 2, для того чтобы предоставлять регулируемое сопротивление разгибания и сопротивление сгибания. С устройством 6 сопротивления согласовано регулировочное устройство 7, например, двигатель, магнит или другой привод, при помощи которого соответствующее сопротивление R внутри блока 6 сопротивления может изменяться. Если блок 6 сопротивления выполнен в виде гидравлического амортизатора или пневматического амортизатора, то регулировочным устройством 7 соответствующее поперечное сечение потока перепускного канала может увеличиваться или уменьшаться. Также регулировочным устройством 7 аэрогидродинамическое сопротивление может изменяться другим образом. Это может происходить, например, посредством открытия или закрытия клапанов или посредством изменений вязкости или магнитореологических свойств. Если блок сопротивления выполнено в виде электродвигателя в режиме генератора, то посредством изменения электрического сопротивления может устанавливаться увеличение или уменьшение соответствующих сопротивлений против сгибания или разгибания.
Для того чтобы была возможность активировать или деактивировать регулировочное устройство 7, с нижней частью 2 согласовано, в частности установлено в оболочке голени, устройство 8 управления, при помощи которого на регулировочное устройство 7 выдается соответствующий сигнал активации или деактивации. Регулировочное устройство 7 активируется или деактивируется на основе данных датчиков, данные датчиков выдаются одним или несколькими датчиками 9, которые расположены на искусственном коленном суставе. Ими могут быть датчики угла, датчики ускорения и/или датчики усилия. Датчики 9 соединены с устройством 8 управления, например, кабелями или при помощи беспроводного передающего устройства. В изображенном примере осуществления датчик 9 выполнен в частности в виде датчика угла колена.
Датчиками 9 контролируется весь цикл шага от касания пяткой (Heel Strike) до нового последующего касания пяткой HS, таким образом также вся фаза маха с разгибанием фазы маха и сгибанием фазы маха.
На фиг. 2 на временной диаграмме нанесен угол α колена, а также амортизация FD сгибания. Угол α колена начерчен для двух ситуаций ходьбы от начала фазы остановки, то есть от касания пяткой HS, до конечной фазы остановки. Нижний ход αP кривой показывает изменение угла колена для ходьбы по горизонтальной плоскости, верхний ход αS кривой показывает изменение угла колена для ходьбы вниз по наклонной поверхности или лестнице, причем речь здесь идет о представлении экипированной протезом ноги при попеременной ходьбе.
Обычный ход кривой угла колена для ходьбы по горизонтальной плоскости согласно кривой αP начинается при максимально разогнутом положении в области касания пяткой HS и после начального контакта земли приводит к увеличению угла α колена до локального максимума αmax в конце реакции нагрузки, для того чтобы затем во время средней фазы остановки снова уменьшаться. Нога находится в этот момент в практически разогнутом положении, в дальнейшем ходе выполнения шага угол α колена в области конечной фазы остановки и фазы перед махом снова увеличивается.
Ход кривой угла колена для попеременной ходьбы вниз по наклонным поверхностям, как изображено на кривой αS, не имеет спада в конце реакции нагрузки, наоборот искусственный коленный сустав остается на постоянном значении αmax, пока он затем раньше, чем при ходьбе по горизонтальной плоскости не начнет сгибаться дальше.
Для того чтобы для обеих ситуаций ходьбы обеспечивать безопасный характер амортизации сгибания фазы остановки, сопротивление FD амортизации или сопротивление сгибания сначала устанавливается на начальный уровень FDI амортизации, который допускает сгибание искусственного коленного сустава при начальном контакте с землей, однако амортизирует и замедляет сгибание, для того чтобы предотвращать ослабление искусственного коленного сустава. Эта начальная амортизации FDI сгибания удерживается сначала постоянной, пока угол α колена не достигнет порогового значения. В изображенном примере осуществления пороговое значение составляет примерно 30% от заданного, допустимого или признанного допустимым максимального угла αmax колена, повышение амортизации FD сгибания начинается практически сразу же после контакта пяткой. Альтернативно пороговое значение может также находиться при большем угле колена, например при 50% или 70% от заданного, допустимого или признанного допустимым максимального угла αmax колена. При достижении заданного порогового значения для угла α колена амортизации FD сгибания повышается, для того чтобы дальнейшее сгибание коленного сустава замедлять и при достижении максимального угла αmax колена блокировать. В изображенном примере осуществления амортизация сгибания повышается прогрессивно, однако она может также повышаться дегрессивно или линейно. Амортизации FD сгибания находится при достижении максимального угла αmax колена на максимальном уровне FDmax амортизации сгибания, на котором дальнейшее сгибание больше не возможно. Это значение FDmax сопротивления удерживается в течение заданного промежутка ΔT времени, образуется плато DP максимального сопротивления FDmax сгибания, в течение этого времени сгибание искусственного коленного сустава не возможно.
Промежуток ΔT времени, в течение которого удерживается этот уровень FDmax, обнаруживается либо элементом с реле времени, либо посредством регистрации поворота Δϕ вперед нижней части 2, например трубы 5 голени, или поворота стопы 3 протеза вокруг голеностопного сустава. Если происходит дальнейший поворот вперед вокруг угла ϕ, который может регистрироваться датчиками ускорения, датчиками угла и/или инерциальными датчиками угла, то пользователь искусственного коленного сустава двигается дальше вперед. В качестве возможного углового диапазона для дальнейшего поворота ϕ вперед могут приниматься от 5° до 10° угла поворота. После достижения предельного значения для дальнейшего поворота вперед или времени срабатывания амортизация FDmax сгибания уменьшается. В изображенном примере осуществления уменьшение происходит дегрессивно, так что сначала вызывается быстрый спад амортизации сгибания, например для того чтобы делать возможным дальнейшее сгибание при ходьбе вниз по наклонной поверхности, как это показывает ход кривой αS. Могут устанавливаться другие характеры уменьшения амортизации, например, прогрессивно или линейно. В области плато с плато DP сопротивления в течение времени ΔT дальнейшее движение сгибания искусственного коленного сустава не происходит. Лишь после понижения сопротивления FD сгибания до уровня ниже максимального сопротивления FDmax сгибания, в изображенном примере осуществления выше уровня начальной амортизации FDI сгибания в области падающей кривой FDS, создаются условия для возрастающего сгибания.
Преимущество этого управления заключается в высокой степени безопасности, которая обусловлена начальным, всегда ограниченным сгибанием колена на максимальный угол αmax колена, без того чтобы при этом был ограничен объем движения или функционалитет во время дальнейшего процесса движения. Если максимальный угол αmax колена достигается и нога поворачивается дальше вперед, без того чтобы доходило до разгибания колена, как показано на кривой αS, амортизация FD сгибания непрерывно понижается до высокой амортизации, при необходимости вплоть до начальной амортизации FDI сгибания. Таким образом, при ходьбе вниз по наклонным поверхностям или лестницам гарантируется без потерь безопасности то, что может иметь место ненарушенный дальнейший процесс движения.
Реферат
Изобретение относится к медицине, а именно к способу управления амортизацией фазы остановки искусственного коленного сустава. Искусственный коленный сустав содержит верхнюю частью, нижнюю часть, блок сопротивления и блок управления. Верхняя часть и нижняя часть закреплены друг на друге с возможностью поворота вокруг оси поворота. Блок сопротивления расположен между верхней частью и нижней частью и имеет регулировочное устройство, при помощи которого может изменяться сопротивление амортизации. Блок управления согласован с регулировочным устройством и соединен по меньшей мере с одним датчиком, причем регулировка осуществляется на основе данных датчика. Во время сгибания фазы остановки вплоть до конечной фазы остановки угол колена регистрируют по меньшей мере одним датчиком и амортизацию сгибания поднимают до уровня выше начальной амортизации сгибания вплоть до предотвращения дальнейшего сгибания при достижении заданного максимального угла колена. Изобретение обеспечивает возможность адаптации к различным ситуациям во время ходьбы и комфортный характер ходьбы при одновременной максимальной безопасности. 9 з.п. ф-лы, 2 ил.
Формула
Документы, цитированные в отчёте о поиске
Искусственный коленный сустав с регулированием сил подтормаживания раздельно при сгибании и разгибании
Комментарии