Способ управления изменением амортизации - RU2705923C2
Код документа: RU2705923C2
Чертежи
Описание
Изобретение относится к способу управления изменением амортизации у искусственного коленного сустава ортеза, экзоскелета или протеза, причем искусственный коленный сустав имеет верхнюю часть и нижнюю часть, которые закреплены друг на друге с возможностью поворота вокруг оси поворота, причем между верхней частью и нижней частью закреплен блок сопротивления для предоставления сопротивления против сгибания или разгибания искусственного коленного сустава, и с блоком сопротивления согласовано регулировочное устройство, при помощи которого изменяется сопротивление, если сигнал датчика согласованного с регулировочным устройством блока управления активирует регулировочное устройство, причем для фазы маха (проноса ноги в воздухе) изгибное сопротивление уменьшается.
Коленные суставы для ортезов, экзоскелетов или протезов имеют верхнюю часть с верхним соединительным элементом и нижнюю часть с нижним соединительным элементом, которые шарнирно друг с другом соединены. На верхнем соединительном элементе, как правило, расположены захваты для культи бедра или шина бедра, в то время как на нижнем соединительном элементе расположена труба голени или шина голени. В самом простом случае верхняя часть и нижняя часть соединены друг с другом с возможностью поворота на одноосном шарнире.
Для того чтобы была возможность наиболее естественно воспроизводить или поддерживать различные требования во время различных фаз одного шага или при других движениях или операциях, зачатую предусмотрено устройство сопротивления, которое предоставляет сопротивление сгибания и сопротивление разгибания. Посредством сопротивления сгибания устанавливается, насколько легко нижнюю часть можно поворачивать назад относительно верхней части при приложенном усилии. Сопротивление разгибания замедляет движение нижней части вперед и образует среди прочего упор разгибания.
Из DE 10 2008 008 284 A1 известен ортопедический коленный сустав с верхней частью и расположенной на ней с возможностью поворота нижней частью, с которым согласованы несколько датчиков, например, датчик угла сгибания, датчик ускорения, датчик наклона и/или датчик усилия. В зависимости от данных датчиков определяется положение для упора разгибания.
DE 10 2006 021 802 A1 описывает управление пассивным коленным суставом протеза, включающее в себя регулируемую амортизацию в направлении сгибания для адаптации устройства протеза с расположенными с верхней стороны соединительными средствами и соединительным элементом для искусственной стопы. Адаптация осуществляется к подъему по лестнице, причем обнаруживается происходящее при низком моменте поднятие стопы протеза, и амортизация сгибания понижается во время фазы поднятия ниже уровня, который подходит для ходьбы по плоскости. Амортизация сгибания может увеличиваться в зависимости от изменения угла сгибания колена и в зависимости от действующего на голень осевого усилия.
DE 10 2009 052 887 A1 описывает среди прочего способ управления суставом ортеза или протеза при помощи устройства сопротивления и датчиков, причем датчиками во время использования сустава предоставляются данные о состоянии. Датчики регистрируют моменты или усилия, причем данные датчиков, по меньшей мере, двух установленных параметров увязываются друг с другом посредством математической операции, и вследствие этого рассчитывается вспомогательная переменная, которая берется за основу управления сопротивлением сгибания и/или разгибания.
Для управления характером амортизации при запуске фазы маха, то есть во время конечной фазы остановки для подготовки запуска фазы маха, сопротивления сгибания уменьшаются еще во время фазы остановки при нагрузке в направлении сгибания, что при слишком раннем запуске может приводить к ослабевающему суставу. Момент времени запуска фазы маха, то есть уменьшения сопротивления сгибания посредством уменьшения соответствующей амортизации сгибания, рассчитывается, как правило, на основе нормальной длительности шага. Нормальное значение длительности шага принимается из оценки множества анализов ходьбы, и на основе этого принятого значения в определенный момент времени после начала фазы остановки, то есть после "бега с пятки", инициируется по умолчанию запуск фазы маха. Такое управление является проблематичным, если скорости ходьбы существенно изменяются или отклоняются от нормы. Придерживание заданного стандартного значения может приводить при медленной ходьбе к тому, что запуск фазы маха начинается слишком рано, то есть сопротивление сгибания слишком сильно уменьшается еще во время фазы остановки.
Задача данного изобретения предоставить способ, с помощью которого при повышенной защите против непреднамеренного сгибания возможна гибкая адаптация запуска фазы маха даже при различных ситуациях во время ходьбы или различных скоростях ходьбы, а также под нагрузкой сгибания.
Согласно изобретению эта задача решается с помощью способа с признаками основного независимого пункта формулы изобретения. Предпочтительные варианты осуществления и усовершенствования изобретения раскрыты в зависимых пунктах формулы изобретения, описании, а также на чертеже.
Способ управления искусственным коленным суставом, в частности изменением амортизации искусственного коленного сустава ортеза, экзоскелета или протеза, имеющим верхнюю часть и нижнюю часть, которые установлены друг на друге с возможностью поворота вокруг оси поворота, причем между верхней частью и нижней частью расположен блок сопротивления для предоставления сопротивления против сгибания или разгибания искусственного коленного сустава, и с блоком сопротивления согласовано регулировочное устройство, при помощи которого изменяется сопротивление, если сигнал датчика согласованного с регулировочным устройством блока управления активирует регулировочное устройство, причем для фазы маха сопротивление сгибания уменьшается, предусматривает то, что во время ходьбы или стояния, в частности при каждом шаге, регистрируется изменение по меньшей мере одного параметра нагрузки, который оказывает влияние на ортез или протез, устанавливается максимум изменения параметра нагрузки во время фазы остановки или стояния, и после достижения максимума при достижении порогового значения параметра нагрузки ниже максимума амортизация сгибания уменьшается во время фазы остановки до уровня амортизации фазы маха. Благодаря началу запуска фазы маха и связанному с ним уменьшению сопротивления сгибания в зависимости от установления максимума параметра нагрузки является возможным в зависимости от изменения параметра нагрузки вариативно определять момент времени запуска фазы маха и тем самым момент времени уменьшения амортизации сгибания. Лишь после достижения максимума параметра нагрузки и установления того, что параметр нагрузки снова уменьшается, сокращается амортизация сгибания. Установление уменьшения параметра нагрузки может осуществляться датчиками и посредством дешифровки сигналов датчиков о нагрузке. Благодаря уменьшению амортизации сгибания лишь после максимума параметра нагрузки обеспечивается то, что перед достижением максимального значения нагрузки, которое может приводить к сгибанию искусственного коленного сустава, не происходит нежелательное уменьшение амортизации сгибания. Запуск фазы маха происходит таким образом адаптивно, и принятие или оценка длительности движения, например, длительности шага, больше не требуется. Возможно вариативно реагировать на различные характеры движений. Сокращенная длительность шага компенсируется при помощи соответствующего изобретению способа так же, как и увеличенная длительность шага. Благодаря регистрации параметра нагрузки во время стояния возможно уже с первого шага обеспечить запуск фазы маха, максимум нагрузки определяется также во время стояния. Способ предусмотрен для управления как протезами, так и ортезами и экзоскелетами. Если в дальнейшем говорится об ортезах, то исполнения относятся также к особой форме ортеза в виде экзоскелета.
В качестве параметра нагрузки предпочтительны в частности момент лодыжки и/или осевое усилие на нижнюю часть. Во время фазы остановки возникает колоколообразный контур или двускатный горб изменения момента лодыжки, а также изменения осевого усилия во времени. В качестве осевого усилия рассматривается то усилие, которое действует вдоль продольного распространения нижней части, у протезов вдоль продольного распространения трубы голени, у ортезов вдоль продольного распространения шины голени. Если достигается максимальный момент лодыжки или максимальное осевое усилие, то изменение момента лодыжки или осевого усилия контролируется и далее, сбор данных датчиков продолжается в течение всего шага и для каждого шага. Датчики регистрируют или определяют соответствующий параметр нагрузки в течение всей длительности шага, то есть от "бега с пятки" до "бега с пятки" и во время всей ходьбы. Если достигается установленное пороговое значение уменьшающегося параметра нагрузка, например, значение между 95% и 50% максимальной нагрузки, то амортизация сгибания уменьшается, и инициируется запуск фазы маха. Уменьшение сопротивления осуществляется в этом случае посредством активации регулировочного устройства. Благодаря запуску фазы маха после достижения максимального параметра нагрузки надежность искусственного коленного сустава обеспечивается дольше. Спадающее изменение параметра нагрузки выявляется посредством сравнения двух или нескольких значений датчика, которые регистрируются друг за другом во времени.
Пороговое значение для запуска амортизации фазы маха является переменным по времени и зависит от изменения параметра нагрузки. Если параметр нагрузки уменьшается после достижения максимума лишь медленно, то активация происходит позже, то есть после прохождения более длительного промежутка времени после "бега с пятки", если же кривая параметра нагрузки резко падает, то запуск фазы маха произойдет раньше по времени.
Пороговое значение как таковое может задаваться также вариативно. Пороговое значение зависит, например, от скорости ходьбы или ситуации во время ходьбы. При ходьбе по плоскости пороговое значение может составлять, например, 90% максимальной нагрузки или максимального значения параметра нагрузки, при ходьбе по наклонной поверхности запуск фазы маха может происходить позже, например при достижении 70% максимальной нагрузки или 70% максимального значения параметра нагрузки, при очень медленной ходьбе порог запуска может составлять 50% максимального значения параметра нагрузки.
Пороговое значение может изменяться в зависимости от скорости ходьбы. При быстрой ходьбе с быстрым снятием нагрузки пороговое значение смещается в сторону максимального значения параметра нагрузки, при медленной ходьбе от максимального значения. Наряду с осевым усилием или моментом лодыжки в качестве параметра нагрузки может также скорость перекатывания, также дополнительно к моменту лодыжки или осевому усилию, использоваться в качестве критерия для изменения порогового значения. Чем быстрее нижняя часть, то есть шина голени или труба голени, перемещается из наклонного против направления ходьбы положения в наклонное в направлении ходьбы положение, тем раньше происходит запуск фазы маха посредством уменьшения сопротивления сгибания. Пороговое значение может далее зависеть от скорости снятия нагрузки или скорости падения параметра. Чем больше скорость падения усилия или падения момента, то есть чем быстрее уменьшается параметр нагрузки, тем раньше вызывается запуск фазы маха.
Усовершенствование изобретения предусматривает то, что пороговое значение зависит от углового положения компонента протеза или компонента ортеза. Пороговое значение может изменяться, например, в зависимости от достижения определенного угла перекатывания. Если выявляется определенное положение нижней части относительно вертикали, то может делаться вывод о завершении цикла движений. Сверх этого, посредством достижения углов может делаться вывод о соответствующей ситуации во время ходьбы. Если во время шага при касании земли не достигается полное разгибание колена, то может, например, приниматься, что пациент поднимается на склон или попеременно преодолевает ступени лестницы, так что устанавливается определенное пороговое значение, которое отличается от порогового значения для ходьбы по плоскости. То же самое относится к выявлению наклона вперед нижней части или же также верхней части, в качестве направления наклона или абсолютного угла верхней части и/или нижней части к направлению гравитации.
Усовершенствование изобретения предусматривает то, что уменьшение амортизации сгибания осуществляется в зависимости от изменения параметра нагрузки. Если параметр нагрузки уменьшается очень быстро, то также амортизация сгибания уменьшается быстрее во время фазы остановки до уровня амортизации фазы маха, если же более вероятно происходит медленное уменьшение параметра нагрузки, то может делаться вывод о медленной скорости ходьбы, что требует медленного уменьшения амортизации сгибания.
Исходное значение амортизации сгибания перед уменьшением может устанавливаться на значение или стандартное значение, которое блокирует сгибание во время стояния или во время фазы остановки. Исходной точкой для запуска фазы маха с уменьшением амортизации сгибания на фазе остановки является таким образом сопротивление, блокирующее сгибание, так что уже с первого шага может осуществляться инициация фазы маха посредством уменьшения амортизации сгибания в области конечной фазы остановки. Исходное значение амортизации сгибания предусматривает таким образом блокировку на фазе остановки или во время стояния.
Уменьшение амортизации осуществляется непрерывно в зависимости от параметра нагрузки, таким образом существует прямая корреляция в отношении уменьшения амортизации сгибания и изменения параметра нагрузки, в частности уменьшения параметра нагрузки.
Максимум параметра нагрузки находится принципиально выше заданного порогового значения, так как в противном случае невозможно проходить кривую параметра нагрузки и после достижения максимума активировать запуск фазы маха. То есть пороговым значением назначается соответствующее значение параметра нагрузки, которое в целом должно достигаться, чтобы активировался способ управления изменением амортизации для запуска фазы маха.
Пороговое значение для запуска амортизации фазы маха может задаваться вариативно и зависит от величины параметра нагрузки или максимума. Если после достижения исходного порогового значения достигается лишь сравнительно низкий максимум, то пороговое значение запуска может изменяться, например, увеличиваться, так что при более быстром уменьшении амортизации сгибания вызывается более раннее начало фазы маха.
Для того чтобы обеспечивать дополнительную безопасность для пациента, амортизация сгибания после уменьшения может снова повышаться, если значение параметра нагрузки снова повышается. Если изменение параметра нагрузки проходит после достижения максимума изменение в монотонном характере и снова возрастает, то амортизация сгибания может снова увеличиваться, так как может приниматься, что обычный изменение параметра нагрузки нарушен, существует таким образом отличный от образца ходьбы характер ходьбы, и вследствие этого должна обеспечиваться повышенная безопасность против вынужденного сгибания искусственного сустава. Такая мера служит для того, чтобы искусственный сустав, например, при спотыкании, мог снова нагружаться, не ослабевая.
Блок сопротивления может быть выполнен, например, в виде привода, например, в виде гидравлического, пневматического, магнитореологического, магнитного, электрического, механического или электромагнитного блока сопротивления. У гидравлических или пневматических блоков сопротивления закрываются перепускные каналы, так что по этим перепускным каналам никакая среда больше не может перетекать из камеры разгибания в камеру сгибания. Таким образом, поток среды между камерой разгибания и камерой сгибания может при необходимости также полностью блокироваться. У механических блоков сопротивления, например, трение повышается настолько, что дальнейшее сгибание не может происходить. То же самое относится к приводимым в действие электрически блокам сопротивления.
Также могут использоваться приводы, которые и активно вводят энергию в систему, и наоборот выводят энергию из системы и таким образом действуют в качестве блока сопротивления. Приводы могут быть выполнены, например, в виде электродвигателей, гидравлических или пневматических насосов или пьезоэлектрических элементов.
Далее пример осуществления изобретения разъясняется более подробно при помощи чертежа. На чертеже показаны:
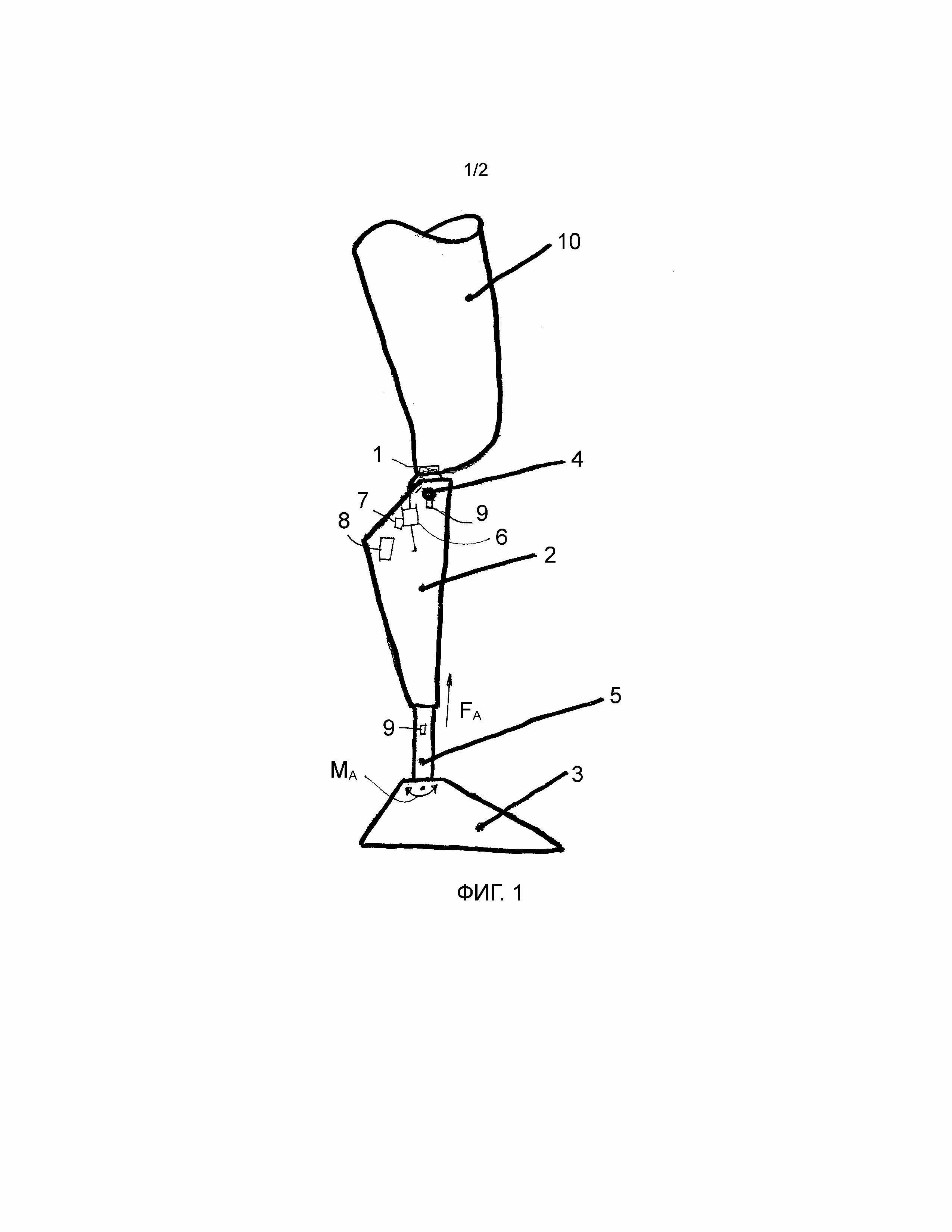
фиг. 1 - схематичное изображение протеза; и
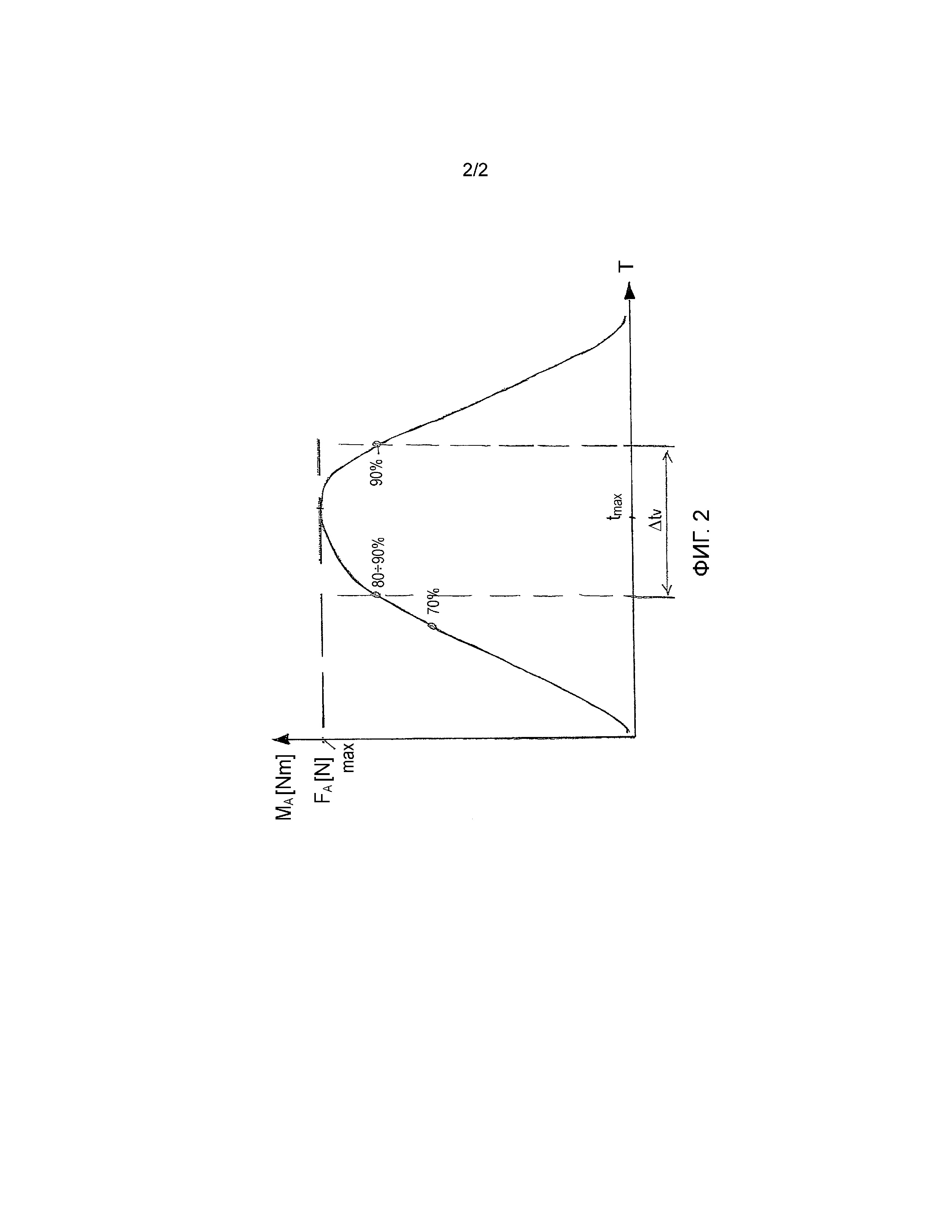
фиг. 2 - изменение параметра нагрузки.
На фиг. 1 показан на схематичном изображении протез ноги с верхней частью 1, на которой закреплена бедренная гильза 10 для приема культи бедра. На верхней части 1 расположена с возможностью поворота нижняя часть 2 в виде части голени. Нижняя часть 2 установлена на верхней части 1 с возможностью поворота вокруг оси 4 поворота. Нижняя часть 2 имеет трубу 5 голени, на дистальном конце которой закреплена стопа 3 протеза, в которой может быть размещено устройство для определения действующего на трубу 5 голени осевого усилия FA, а также момента MA лодыжки, который действует вокруг места закрепления стопы 3 протеза на трубе 5 голени.
В или на нижней части 2 расположено устройство 6 сопротивления, которое может быть выполнено, например, в виде амортизатора или привода, и которое поддерживается между верхней частью 1 и нижней частью 2, для того чтобы предоставлять регулируемое сопротивление разгибания и сопротивление сгибания. С устройством 6 сопротивления согласовано регулировочное устройство 7, например, двигатель, магнит или другой привод, при помощи которого соответствующее сопротивление внутри устройства 6 сопротивления может изменяться. Если устройство 6 сопротивления выполнено в виде гидравлического амортизатора или пневматического амортизатора, то регулировочным устройством 7 соответствующее поперечное сечение потока перепускного канала может увеличиваться или уменьшаться, или аэрогидродинамическое сопротивление может изменяться другим образом. Это может происходить также посредством открытия или закрытия клапанов или посредством изменений вязкости или магнитореологических свойств. Если устройство сопротивления выполнено в виде электродвигателя в режиме генератора, то посредством изменения электрического сопротивления может устанавливаться увеличение или уменьшение соответствующих сопротивлений против сгибания или разгибания.
Для того чтобы была возможность активировать или деактивировать регулировочное устройство 7, с нижней частью 2 согласовано, в частности установлено в оболочке голени, устройство 8 управления, при помощи которого на регулировочное устройство 7 выдается соответствующий сигнал активации или деактивации. Регулировочное устройство 7 активируется или деактивируется на основе данных датчиков, данные датчиков выдаются одним или несколькими датчиками 9, которые расположены на искусственном коленном суставе. Ими могут быть датчики угла, датчики ускорения и/или датчики усилия. Датчики 9 соединены с устройством 8 управления, например, кабелями или при помощи беспроводного передающего устройства.
Датчиками 9 контролируется весь цикл шага от касания пяткой (Heel Strike) до нового последующего касания пяткой HS, таким образом также вся фаза маха с разгибанием фазы маха и сгибанием фазы маха.
Фиг. 2 показывает изменение двух параметров нагрузки, а именно момента MA лодыжки и осевого усилия FA. Осевое усилие FA действует на нижнюю часть 2 в направлении продольного распространения нижней части, момент MA лодыжки действует в области стопы 3 протеза или элемента стопы ортеза. Изменение параметров нагрузки изображен во времени T. Обнаруживается по существу колоколообразное изменение параметров MA и FA нагрузки. Из уровня техники известно перед достижением максимума момента MA лодыжки или осевого усилия FA сокращать амортизацию фазы остановки, для того чтобы была возможность вызывать запуск фазы маха. Значения запуска для этого находятся от 70% до 90% перед достижением максимального значения MAmax или FAmax параметра нагрузки. Пороги запуска согласно уровню техники точно определены во времени и находятся перед моментом tmax времени, в который имеет место или принимается максимальное значение параметра нагрузки.
Теперь согласно изобретению предусмотрено лишь после достижения максимума MAmax, FAmax вызывать сокращение амортизации сгибания. Для этого параметры нагрузки регистрируются датчиками 9 с высокой частотой сканирования в течение всего цикла шага во время ходьбы. Равным образом возможно регистрировать угловые величины, угловые скорости или величины положения, как например абсолютный угол, и анализировать изменение этих параметров. После достижения максимума параметра нагрузки или параметров нагрузки сокращается перед достижением конечной фазы остановки и перед отрывом от земли пальцев стопы амортизация сгибания, для того чтобы делать возможным сгибание искусственного коленного сустава и для того чтобы была возможность предоставлять приближенную к естественной ходьбе модель движения. Таким образом, критерием для активации, то есть для сокращения амортизации сгибания, является в первую очередь достижение максимального значения параметра нагрузки, например, достижение максимального момента MAmax лодыжки и/или максимального осевого усилия FAmax. Затем дальнейший изменение параметра нагрузки и далее контролируется или определяется и проверяется на предмет того, достигается ли ранее заданное, однако переменное пороговое значение, которое не зависит во времени от момента tmax времени. Пороговое значение не определено точно во времени, а зависит только от изменения параметра нагрузки. Количественное установление максимального значения так же мало необходимо как и оценка длительности шага или длительности нагрузки. Как только заданное или определенное на основе других данных датчиков пороговое значение достигается, может осуществляться запуск фазы маха посредством сокращения амортизации сгибания. Для ходьбы по плоскости обычным значением является 90% максимальной нагрузки или максимального момента, тем не менее это значение зависит от скорости ходьбы, состояния/консистенции грунта, а также от использования вспомогательных средств для ходьбы. Пороговое значение может варьироваться между 95% максимального значения параметра нагрузки и 50% максимального значения параметра нагрузки. Таким образом, пороговое значение не должно быть жестко установленной величиной, управляющая величина может варьироваться. Благодаря запуску фазы маха после достижения максимального значения параметра нагрузки надежность искусственного коленного сустава обеспечивается дольше для более длительного промежутка времени, а именно ΔtV. Опасность ослабления сустава из-за преждевременного запуска фазы маха, например, при замедляющемся шаге, вследствие этого, по меньшей мере, сокращается.
Для задания порогового значения может использоваться скорость снятия нагрузки или скорость перекатывания во время ходьбы. Равным образом возможно использовать для изменения порогового значения угол перекатывания, направление ходьбы, что может определяться посредством анализа изменения угла нижней части относительно вертикали, "качество" угла, то есть имеется ли наклон вперед или наклон назад, а также абсолютный угол в пространстве и задавать во время ходьбы соответствующее пороговое значение снова. Вследствие этого может достигаться надежный и адаптированный к соответствующему характеру ходьбы запуск фазы маха.
При быстром снятии нагрузки фаза маха запускается раньше, чем при медленном снятии нагрузки, что в частности при медленной ходьбе обеспечивает повышение надежности против нежелательного сгибания. Все исполнения, которые относятся к протезу, имеют силу соответственно для ортеза. Вместо трубы голени применяется в этом случае шина голени. Фиксация на пациенте осуществляется не с помощью гильзы, а при помощи ремней, манжеты или тому подобного на имеющейся ноге.
Реферат
Изобретение относится к медицине, а именно к способу управления изменением амортизации у искусственного коленного сустава ортеза, экзоскелета или протеза. Искусственный коленный сустав имеет верхнюю часть и нижнюю часть, которые закреплены друг на друге с возможностью поворота вокруг оси поворота. Между верхней частью и нижней частью закреплен блок сопротивления для предоставления сопротивления против сгибания или разгибания искусственного коленного сустава. С блоком сопротивления согласовано регулировочное устройство, при помощи которого изменяется сопротивление, если сигнал датчика согласованного с регулировочным устройством блока управления активирует регулировочное устройство. Для фазы маха сопротивление сгибания уменьшается. Во время ходьбы или стояния регистрируют изменение по меньшей мере одного параметра нагрузки, который оказывает влияние на ортез или протез. Устанавливают максимум изменения параметра нагрузки во время фазы остановки или стояния. После достижения максимума при достижении порогового значения параметра нагрузки ниже максимума амортизацию сгибания уменьшают во время фазы остановки до уровня амортизации фазы маха. Изобретение обеспечивает при повышенной защите против непреднамеренного сгибания возможность гибкой адаптации запуска фазы маха при различных ситуациях во время ходьбы или различных скоростях ходьбы, а также под нагрузкой сгибания. 9 з.п. ф-лы, 2 ил.
Комментарии