Упругий вкладыш стопы - RU2184508C2
Код документа: RU2184508C2
Чертежи




Описание
Изобретение относится к упругому вкладышу для искусственной стопы, содержащему по меньшей мере одну листовую пружину.
Упругие вкладыши стопы раскрыты, например, в US-A-4959073, DE 4038063 С2 и DE 42059000 А1, в FR-A1-2640499 и в полезной модели Германии G 9315665.0. Используемые здесь листовые пружины подвержены чрезвычайно высокой нагрузке. При этом листовые пружины могут быть изготовлены из карбонкомпозита, титана или же других подходящих материалов. Функционально необходимая деформация приводит к большим напряжениям, для восприятия которых усталостная прочность листовых пружин часто оказывается недостаточной.
В основу изобретения положена задача повысить структурную прочность листовых пружин, применяемых в упругих вкладышах стопы.
Эта задача решается согласно изобретению тем, что по меньшей мере одна листовая пружина выполнена не менее чем из двух одновременно включаемых в работу листовых элементов, которые установлены рядом друг с другом, соединены между собой в обеих своих концевых зонах и образуют друг относительно друга зазор в свету между указанными концевыми зонами.
В то время как простое увеличение толщины материала как правило не позволяет решить проблему, можно за счет одновременного включения в работу двух более мягких пружин добиться неожиданно эффективного улучшения структурной прочности, не изменяя при этом требуемой упругой характеристики.
С учетом формы и функционирования листовой пружины должен обеспечиваться достаточный размер зазора в свету между обоими листовыми элементами, чтобы при деформации листовой пружины избежать преждевременного прилегания листовых элементов друг к другу и, как следствие, - резкого изменения упругой характеристики.
Причем для достижения требуемой усталостной прочности целесообразно, чтобы по меньшей мере в одной из двух концевых зон между обоими листовыми элементами был предусмотрен распорный элемент.
Для оказания влияния на общую жесткость вкладыша стопы целесообразно также, чтобы оба листовых элемента, образующие пружину плюсны, опирались в образованной между ними зоне зазора в свету на амортизатор, который может быть выполнен упругим или же в виде жесткого распорного элемента. При этом полезно, чтобы такой амортизатор был выполнен с возможностью замены на амортизатора иной жесткости или иной упругой характеристики. Однако жесткость или упругую характеристику можно также регулировать перемещением амортизатора, в частном случае перемещением механического распорного элемента, в продольном направлении между обоими листовыми элементами.
Для обеспечения возможности изменения жесткости зазор в свету между обоими листовыми элементами, образующими пружину плюсны, согласно изобретению выполнен регулируемым. При этом изобретение предусматривает использование этой функции регулирования таким образом, чтобы жесткость регулировалась как функция динамики ходьбы пациента. Согласно изобретению в качестве амортизатора возможно применение наполненной воздухом подушки под давлением, которая при полном заполнении без образования напряжений прилегает к обоим плоским элементам, образующим пружину плюсны, не создавая предварительного натяжения листовых пружин.
Для использования такой наполненной воздухом подушки в качестве управляемого распорного элемента целесообразно эту подушку присоединить к напорному патрубку воздухоподкачивающего элемента, интегрированного вместе с вкладышем в искусственную стопу и приводимого в действие в зависимости от веса пациента и/или в результате активности пациента. Далее целесообразно установить воздухоподкачивающий элемент между ветвями с-образной пяточной пружины так, чтобы его рабочий ход являлся функцией упругой деформации пяточной пружины. Поскольку величины прогиба пятки как правило устанавливаются явно меньшими но сравнению с величинами прогиба плюсны, ход перемещения пятки меньше влияет на рисунок ходьбы. В соответствии с изобретением деформация пятки используется поэтому для управления жесткостью плюсны. При этом в конструктивном исполнении может быть предусмотрено срабатывание вышеупомянутого воздухоподкачивающего элемента при сжатии пяточной пружины.
Динамика ходьбы пациента является функцией его самочувствия, а также его конкретной деятельности. В то время как функция адаптации к самочувствию вполне возможна благодаря последовательно адаптирующей системе (как в случае, описанной выше воздушной подушки), адаптация к осуществляемой на данный момент деятельности (например, на рабочем месте) должна происходить иногда очень быстро, практически от шага к шагу. Однако такая быстрая адаптация едва ли может быть обеспечена пневматической системой.
Для осуществления быстрой автоматической адаптации стопы протеза к фактической динамике ходьбы пациента согласно изобретению предлагается поставить продольное перемещение амортизатора, выполненного в виде жесткого распорного элемента, между образующими пружину плюсны листовыми элементами в механическую зависимость от интенсивности наступания на пятку. Одно из конструктивных решений может состоять в том, что с-образная пяточная пружина своей верхней ветвью соединена с пружиной плюсны под ее задней концевой зоной, а свободным концом своей нижней ветви через шатун связана с амортизатором таким образом, что при сжатии пациентом пяточной пружины шатун перемещает амортизатор в направлении передней концевой зоны пружины плюсны. Когда пациент, совершая широкий шаг, твердо наступает на пятку, шатун смещает распорный элемент вперед. При последующей нагрузке на плюсну положение распорного элемента фиксируется. С помощью более жесткого рычага плюсны пациент может в таком случае совершать больший шаг, чем это возможно при более мягком рычаге плюсны. После снятия нагрузки на плюсну происходит расфиксация распорного элемента и последний возвращается в исходное положение. Такая компоновка позволяет адаптировать жесткость пружины плюсны к каждому отдельному шагу, что является преимуществом при осуществлении сильно варьирующих видов деятельности.
Другие признаки изобретения являются предметом зависимых пунктов формулы и в связи с прочими преимуществами изобретения более подробно поясняются на примерах выполнения.
Некоторые варианты осуществления изобретения в качестве примеров изображены на чертежах, на
которых
фиг. 1 показывает искусственную стопу с упругим вкладышем, состоящим из с-образной пружины и основной пружины или пружины плюсны, вид сбоку;
фиг. 2 - с-образную пружину по
фиг.1, вариант выполнения согласно изобретению;
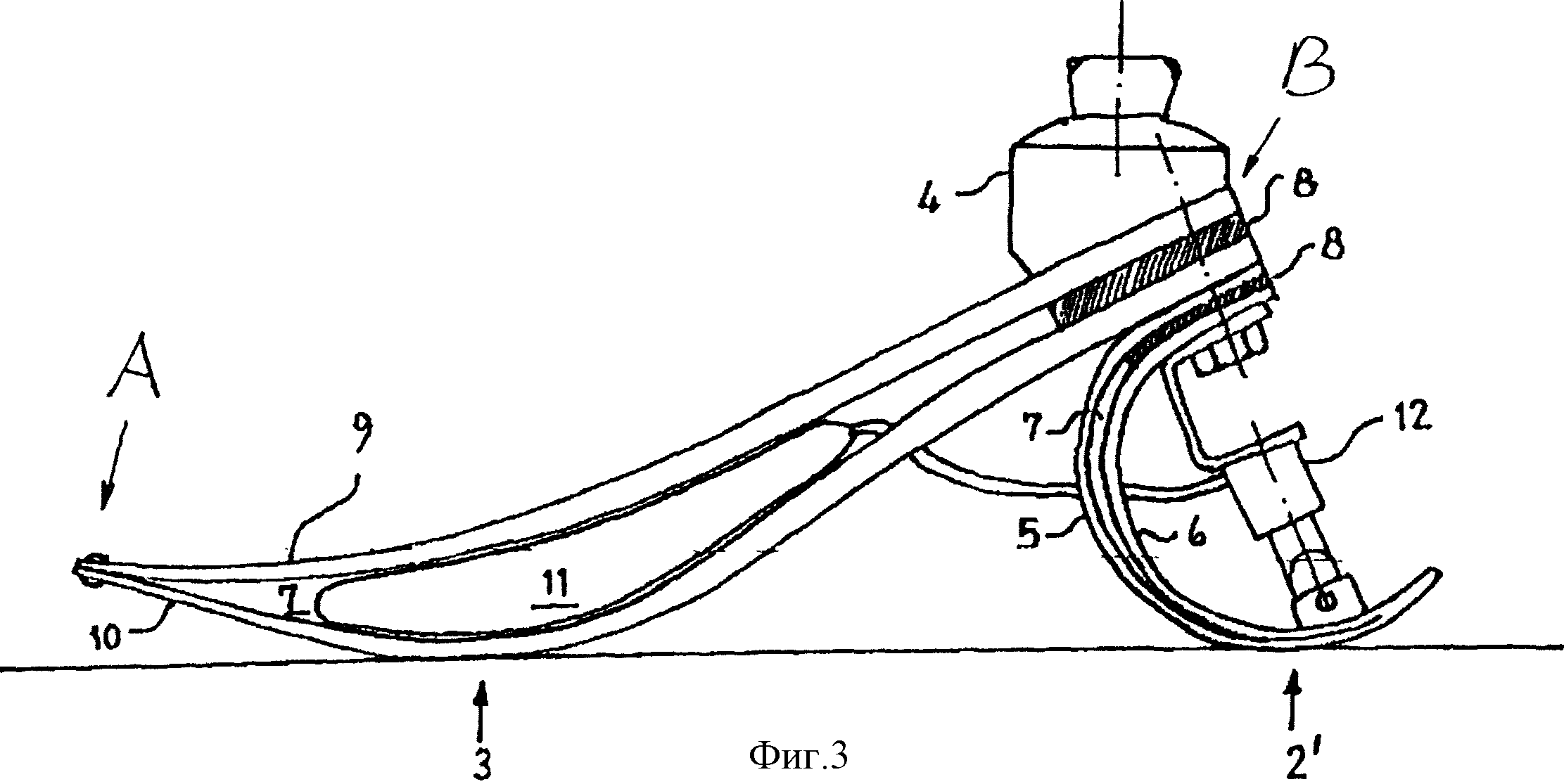
фиг. 3 - измененный вариант выполнения пневматически самоадаптирующейся искусственной стопы, изображенной на фиг.1;
фиг. 4
- измененный вариант выполнения механически самоадаптирующейся искусственной стопы, изображенной на фиг.3;
фиг. 5 - пружину плюсны с упругими амортизаторами, продольный разрез в сагиттальной
плоскости;
фиг. 6 - пружину плюсны по фиг.5 с распорным элементом, установленным с возможностью продольного перемещения от руки.
Бессуставная искусственная стопа, изображенная на фиг.1, снабжена обозначенной штрихпунктиром косметической оболочкой 1, охватывающей упругий вкладыш стопы. Последний состоит в основном из с-образной пружины 2, нижняя ветвь которой свинчена с задним концом основной пружины 3 (пружины плюсны). Верхняя ветвь с-образной пружины 2 свинчена с переходным устройством 4, посредством которого искусственная стопа присоединяется к протезу ноги.
Предлагаемая согласно изобретению конфигурация с-образной пружины 2 показана на фиг.2. Согласно этой фигуре с-образная пружина 2 состоит из двух одновременно включаемых в работу листовых элементов 5, 6, установленных рядом, проходящих примерно параллельно друг другу, соединенных в своих концевых зонах А, В и образующих друг относительно друга зазор 7 в свету между указанными концевыми зонами. В каждой из этих концевых зон А, В между обоими листовыми элементами 5, 6 предусмотрен распорный элемент 8.
На фиг. 3 схематично показан измененный вариант выполнения упругого вкладыша стопы. Он включает с-образную пяточную пружину 2', которая своей верхней ветвью свинчена с пружиной 3 плюсны под ее задней концевой зоной В. Пружина 3 плюсны состоит из двух одновременно включаемых в работу листовых элементов 9, 10, установленных рядом друг с другом и в обеих своих концевых зонах А, В жестко соединенных между собой с возможностью совместного восприятия моментов. Причем лишь в задней концевой зоне В между обоими листовыми элементами 9, 10 предусмотрен распорный элемент 8. Между концевыми зонами А, В оба листовых элемента 9, 10 образуют друг относительно друга зазор 7 в свету, в который вставлен упругий амортизатор 11, прилегающий без создания напряжений к обоим листовым элементам 9, 10.
Амортизатор 11 согласно схематичному примеру выполнения представляет собой наполненную воздухом подушку под давлением, присоединенную к напорному патрубку воздухоподкачивающего элемента 12, который вместе с упругим вкладышем 2, 3 стопы интегрирован в состав искусственной стопы и приводится в действие в зависимости от веса пациента и/или в результате активности пациента. Причем воздухоподкачивающий элемент 12 в данном примере выполнения установлен между ветвями пяточной пружины так, что при нагружении пятки, т. е. при сжатии пяточной пружины 2', срабатывает воздухоподкачивающий элемент и нагнетает воздух в амортизатор 11.
В варианте выполнения согласно фиг.4 пяточная пружина 2' и пружина плюсны 3 в основном соответствуют таким же пружинам на фиг.3. Однако на фиг.4 вместо пневматической адаптации показана механическая адаптация. Здесь свободный конец 13 нижней ветви пяточной пружины 2' через шатун 14 кинематически связан с амортизатором 11', образующим жесткий распорный элемент. Передний конец шатуна 14 установлен с возможностью продольного перемещения в кулисе 15, закрепленной сбоку на амортизаторе 11', прилегает с задней стороны поводком 16 к кулисе 15 и своим свободным концом опирается через пружину 17 на кулису 15. Когда пациент, совершая широкий шаг, твердо наступает на пятку, деформация пяточной пружины 2' приводит к перемещению шатуна 14, который с помощью своего поводка 16 смещает амортизатор 11' дальше вперед, где последний фиксируется при нагружении плюсны. Пружина 17 обеспечивает разгрузку пяточной пружины 2', не изменяя положения амортизатора 11'. После снятия нагрузки с плюсны происходит расфиксация распорного элемента, который под воздействием слабой пружины 17 вновь возвращается в исходное положение.
При таком решении осуществляется быстрая автоматическая адаптация стопы протеза к конкретной динамике ходьбы пациента, причем жесткость двухслойной пружины плюсны устанавливается с помощью перемещаемого в продольном направлении механического распорного элемента, управление которым происходит посредством твердого наступания на пятку.
На фиг.5 изображена пружина 3 плюсны, в зазоре 7 между обоими листовыми элементами 9, 10 которой размещены амортизаторы 11, выполненные либо с возможностью перемещения по стрелке 18 в продольном направлении пружины плюсны, либо же с возможностью сжатия в показанном положении.
Фиг.6 показывает пружину плюсны 3, сравнимую с пружиной на фиг.5, у которой выполненный в виде жесткого распорного элемента амортизатор 11' установлен с возможностью продольного перемещения посредством регулирующего звена 19. Это регулирующее звено 19 представляет собой ходовой винт, по которому вместе с гайкой (не показана) перемещается амортизатор 11'. Своим задним концом ходовой винт выступает из задней концевой зоны В пружины плюсны 3 и может приводиться в действие от руки с помощью вращающейся ручки 20.1
Реферат
Изобретение касается упругого вкладыша для искусственной стопы, содержащего по меньшей мере одну листовую пружину. Вкладыш содержит по меньшей мере одну плоскую пружину, состоящую не менее чем из двух одновременно включаемых в работу листовых элементов, которые установлены рядом друг с другом, соединены между собой в обеих своих концевых зонах и образуют друг относительно друга зазор в свету между указанными концевыми зонами. Соединение по меньшей мере в одной из концевых зон выполнено с возможностью совместного восприятия моментов. Технический результат заключается в увеличении структурной прочности. 12 з.п. ф-лы, 6 ил.

Комментарии