Вкладыш для искусственной стопы - RU2220684C2
Код документа: RU2220684C2
Чертежи





Описание
Изобретение относится к упругому вкладышу для искусственной стопы, содержащему по меньшей мере один упругий элемент, определяющий амортизационную жесткость искусственной стопы, и устройство адаптации для изменения амортизационной жесткости этого упругого элемента.
Подобная форма выполнения описана в патенте Германии DE-A-4205900. Согласно этому патенту вкладыш стопы состоит из трех листовых пружин, одна из которых плоско изогнута, установлена в области пятки и своим передним концом соединена в зоне плюсны с изогнутой пружиной плюсны, которая одним концом простирается вверх в зону присоединения стопы и свинчена здесь с переходным устройством, а другим своим концом входит в переднюю зону стопы. С указанной пружиной плюсны сопряжена вторая, более короткая листовая пружина, своим верхним концом свинченная в зоне присоединения к переходному устройству с верхним концом пружины плюсны и ограничивающая вместе с ней приемную полость, которая клинообразно увеличивается в переднем направлении и в которой установлена наполненная воздухом подушка под давлением, опирающаяся своей верхней и нижней стороной на обе указанные листовые пружины. Пациент может изменять параметры натяга пружин этого вкладыша стопы путем изменения давления воздуха в подушке. При помощи ручного насоса можно производить накачивание подушки под давлением, а имеющееся клапанное устройство позволяет путем стравливания воздуха снижать в подушке внутреннее давление.
В основу изобретения положена задача повышения комфорта при использовании описанного выше вкладыша стопы.
Эта задача решается согласно изобретению тем, что воздействие на устройство адаптации осуществляется в зависимости от соответствующего нагружения стопы пациентом, пользующимся искусственной стопой.
В предпочтительной форме выполнения целесообразно, чтобы упругий элемент представлял собой пружину плюсны и чтобы происходящее в результате нагружения пятки отклонение последней во вкладыше стопы служило входной величиной для принудительного регулирования устройства адаптации.
Таким образом, в соответствии с изобретением жесткость вкладыша стопы регулируется как функция динамики ходьбы пациента. Поскольку величины хода пружины пятки устанавливаются, как правило, меньшими по сравнению с величинами хода пружины плюсны, ход (деформация) пятки оказывает меньшее влияние на рисунок ходьбы. Согласно изобретению отклонение пятки используется поэтому для управления жесткостью плюсны.
В другом варианте выполнения предпочтительно, чтобы юстируемый упругий элемент представлял собой наполненную воздухом подушку под давлением, а устройство адаптации - воздушный насос, приводимый в действие отклонением пятки и повышающий при возрастании нагрузки на нее давление воздуха в подушке, в то время как при уменьшении нагрузки на пятку давление воздуха в подушке снижается, при этом подушка под давлением снабжена предохранительным клапаном, создающим при избыточном давлений постоянную утечку для снижения давления воздуха в течение заданного промежутка времени.
При этом из-за свойственной пневматическому упругому элементу нелинейной характеристики "нагрузка - деформация" целесообразно, чтобы с наполненной воздухом подушкой под давлением была сопряжена профилированная контактная поверхность, проекция площади которой на подушку под давлением при внедрении в подушку согласована с характером возрастания давления, как следствие, уменьшения в ней объема так, что характеристика "нагрузка - деформация" подушки под давлением оказывается по меньшей мере приблизительно линейной. Такую линеаризацию можно получить и путем дигрессивного (убывающего) сближения обеих воздействующих на подушку контактных поверхностей, между которыми она находится.
Динамика ходьбы пациента является функцией его самочувствия, а также его конкретной деятельности. В то время как функция адаптации к самочувствию вполне возможна благодаря последовательно адаптирующей системе (с помощью воздушной подушки, как это описано выше), адаптация к осуществляемой на данный момент деятельности (например, на рабочем месте) должна происходить иногда очень быстро, практически от шага к шагу. Однако такая быстрая адаптация едва ли может быть обеспечена пневматической системой.
Для осуществления быстрой автоматической адаптации стопы протеза к фактической динамике ходьбы пациента согласно изобретению предлагается, чтобы юстируемый упругий элемент представлял собой пружину плюсны, выполненную в виде листовой пружины и проходящую по меньшей мере через зону плюсны, а устройство адаптации - жесткий, перемещаемый в продольном направлении относительно пружины плюсны и определяющий ее амортизационную жесткость распорный элемент, продольное перемещение которого обеспечивается перестановочным элементом, который кинематически связан с отклонением пятки и при максимальном отклонении вызывает максимальное перемещение распорного элемента в направлении переднего конца пружины плюсны, в то время как снятие нагрузки с плюсны вызывает возвратное движение распорного элемента в его исходное положение.
Когда в данном варианте выполнения пациент, совершая широкий шаг, твердо наступает на пятку, распорный элемент перемещается дальше вперед; при последующем нагружении плюсны положение распорного элемента фиксируется. В этом случае с помощью более жесткого рычага плюсны пациент способен совершать больший шаг, чем это было бы возможно при более мягком рычаге плюсны. После снятия нагрузки на плюсну происходит расфиксация и распорный элемент возвращается в исходное положение. Такая компоновка позволяет приспосабливать жесткость пружины плюсны к каждому отдельному шагу, что является преимуществом при осуществлении сильно варьирующих видов деятельности.
Другие признаки изобретения являются предметом зависимых пунктов формулы и в связи с прочими преимуществами изобретения более подробно поясняются на примерах выполнения.
Некоторые варианты осуществления
изобретения в качестве примеров изображены на чертежах, на которых
Фиг.1 показывает механически самоадаптирущуюся искусственную стопу с распорным элементом, установленным с возможностью
продольного перемещения, вид сбоку;
Фиг.2 - деталь измененного варианта выполнения в изображении по фиг.1;
Фиг. 3 - пружину плюсны с упругими амортизаторами, продольный разрез в
сагиттальной плоскости;
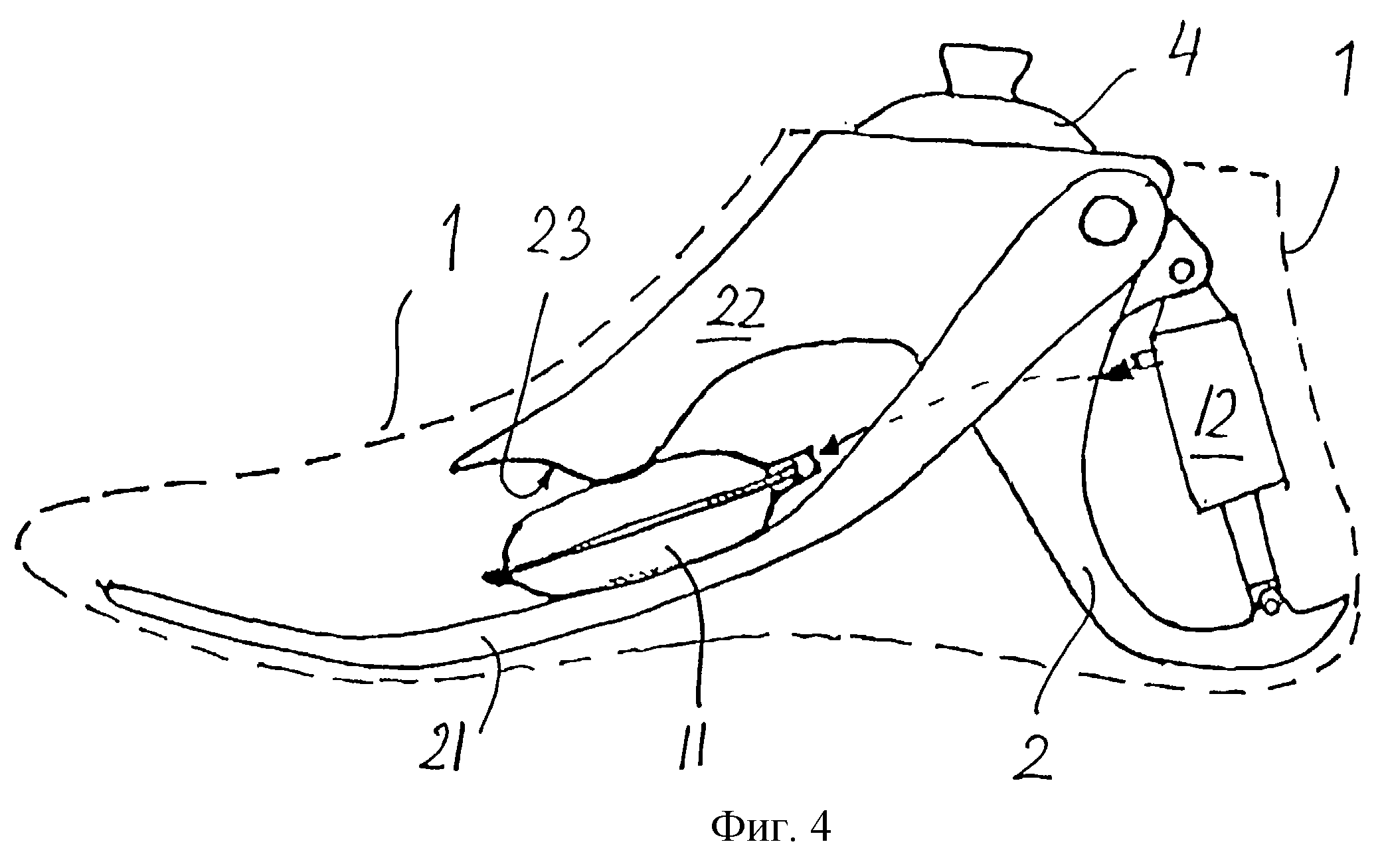
Фиг.4 - измененный вариант выполнения в изображении согласно фиг.1;
Фиг.5 - в схематическом изображении деталь на фиг.4;
Фиг.6 - измененный вариант
выполнения в изображении согласно фиг.1;
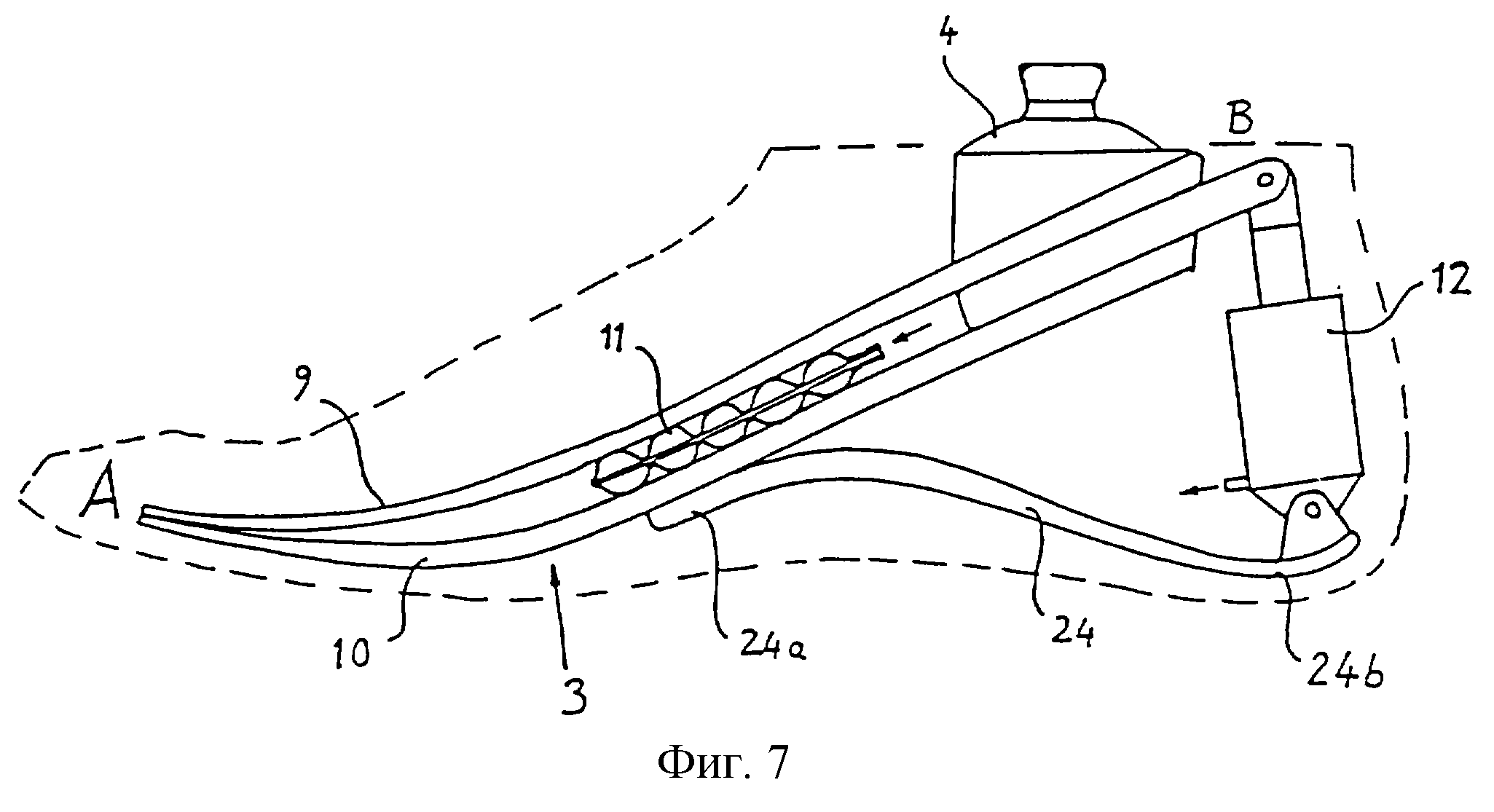
Фиг.7 - измененный вариант выполнения в изображении согласно фиг.1 и
Фиг. 8 - еще один измененный вариант выполнения в изображении согласно
фиг.1.
На фиг. 1 показан упругий вкладыш стопы, содержащий выполненную с-образной пяточную пружину 2, соединенную своей верхней ветвью 2а с задней концевой зоной В пружины 3 плюсны. Верхняя ветвь 2а с-образной пружины 2 свинчена с переходным устройством 4, посредством которого искусственная стопа присоединяется к протезу ноги.
Пружина 3 плюсны состоит из двух одновременно включаемых в работу листовых упругих элементов 9, 10, установленных рядом друг с другом и в обеих своих концевых зонах А, В жестко соединенных между собой с возможностью совместного восприятия моментов. При этом лишь в задней концевой зоне В между листовыми упругими элементами 9, 10 предусмотрен дистанционный элемент 8. Между концевыми зонами А, В оба листовых упругих элемента 9, 10 образуют между собой зазор 7 в свету, в который входит механическое устройство адаптации. Свободный конец нижней ветви с-образной пружины 2 через шатун 14 кинематически связан с жестким распорным элементом 13. Передний конец шатуна 14 установлен с возможностью продольного перемещения в кулисе 15, закрепленной сбоку на распорном элементе 13, прилегает с задней стороны поводком 16 к кулисе 15 и своим свободным концом через пружину 17 опирается на кулису 15. Когда пациент, совершая широкий шаг, твердо наступает на пятку, деформация с-образной пружины 2 (отклонение пятки) приводит к перемещению шатуна 14, который с помощью своего поводка 16 перемещает распорный элемент 13 дальше вперед, где последний фиксируется при последующем нагружении плюсны. Пружина 17 обеспечивает разгрузку пяточной пружины, не изменяя при этом положения распорного элемента 13. После снятия нагрузки с плюсны происходит расфиксация распорного элемента 13, который вслед за этим под воздействием слабой пружины 17 вновь возвращается в исходное положение.
В решении согласно фиг.1 осуществляется, таким образом, быстрая автоматическая адаптация стопы протеза к конкретной динамике ходьбы пациента, причем жесткость двухслойной пружины 3 плюсны устанавливается подвижным в продольном направлении механическим распорным элементом 13, управление которым осуществляется посредством твердого наступания на пятку.
Фиг. 2 показывает пружину 3 плюсны, сравнимую с пружиной на фиг.1, у которой жесткий распорный элемент 13 установлен с возможностью продольного перемещения на ходовом винте 19, по которому распорный элемент 13 перемещается с помощью не показанной на чертеже маточной гайки. Своим задним концом ходовой винт 19 выступает из задней концевой зоны В пружины 3 плюсны и присоединяется здесь к перестановочному элементу (на фиг. не показано), который кинематически связан с отклоняемой в области пятки с-образной пружиной.
Фиг. 3 показывает пружину 3 плюсны, в зазоре 7 между обоими листовыми упругими элементами 9, 10 которой размещена упругая подушка 11 под давлением, выполненная либо с возможностью перемещения по стрелке 18 в продольном направлении пружины 3 плюсны посредством механического устройства, например согласно фиг. 1 или фиг.2 в зависимости от нагружения пятки, либо с возможностью накачивания в показанном положении при осуществлении зависящего от нагрузки на пятку управления.
Бессуставная искусственная стопа, изображенная на фиг. 4, снабжена обозначенной штрихпунктиром косметической оболочкой 1, охватывающей упругий вкладыш стопы, выполненный в виде наполненной воздухом подушки 11 под давлением. Подушка 11 под давлением расположена на поворотной основной пружине 21, также выполненной в виде листовой пружины, проходящей в область плюсны и шарнирно, с возможностью поворота сочлененной своим задним концом с верхней зоной с-образной пружины 2.
Подушка 11 под давлением со своей верхней стороны подвержена воздействию жесткой ножки 22 вкладыша стопы. Контактная поверхность 23 этой жесткой ножки 22 выполнена профилированной. Наполненная воздухом подушка 11 под давлением присоединена к напорному патрубку воздухоподкачивающего элемента 12, который установлен в полости, охватываемой с-образной пружиной 2, и приводится в действие в зависимости от веса пациента и/или за счет его активности. С-образная пружина 2 при нагружении пятки несколько сжимается, причем появляющееся в результате этого изменение расстояния между обеими ветвями 2а, 2b с-образной пружины определяет отклонение пятки, которое представляет собой привод воздухоподкачивающего элемента 12.
Фиг. 5 наглядно поясняет, что проекция площади С профилированной контактной поверхности 23 на подушку 11 под давлением при внедрении в подушку 11 согласована с характером нарастания давления вследствие уменьшения в ней объема так, что характеристика "нагрузка - деформация" подушки 11 под давлением получается по меньшей мере приблизительно линейной. При этом указанная площадь С спроектирована в направлении действия обозначенной на чертеже силы F.
Поскольку пневматические упругие элементы, как правило, обладают нелинейной характеристикой "нагрузка - деформация", контактная поверхность 23 профилируется согласно изобретению с таким расчетом, чтобы получить линеаризованные кривые. Параметры "нагрузка - деформация" у подобных наполненных воздухом подушек под давлением являются для изотермического случая функцией площади С прилегания, спроектированной в направлении действия силы, а также обратной величины остаточного объема V в подушке, внутреннее давление Р которой вытекает из частного F/C.
Вариант выполнения согласно фиг.6 соответствует в отношении распорного элемента и его кинематической связи с с-образной пружиной решению, предложенному согласно фиг. 1, однако здесь оба листовых упругих элемента 9, 10, образующих пружину 3 плюсны, соединены друг с другом с возможностью совместного восприятия моментов лишь на своем заднем конце В.
Вкладыш стопы, изображенный на фиг.7, характеризуется пружиной 3 плюсны, простирающейся почти по всей длине вкладыша стопы, и пяточной пружиной 24, выполненной плоско синусоидальной и закрепленной концом 24а своего переднего плеча в средней продольной зоне пружины 3 плюсны с ее нижней стороны. Устройство адаптации образовано, в свою очередь, воздухоподкачивающим элементом 12, установленным между концом 24b заднего плеча пяточной пружины 24 и задним концом пружины 3 плюсны. Таким образом, речь вновь идет о конструкции с пневматической адаптацией, преимущество которой следует усматривать в том, что больший прогиб плюсны обеспечивает больший суммарный ход устройства адаптации. При использовании воздушного насоса в качестве устройства адаптации происходит, таким образом, всасывание большего количества воздуха, то есть, иначе говоря, больше воздуха нагнетается в наполненные воздухом подушки 11 под давлением и, следовательно, в плюсну. При успешной адаптации прогиб плюсны вследствие большой жесткости пружины уменьшается и насос вновь подает установленный обычный объем.
Вкладыш стопы, изображенный на фиг.8, состоит из основной пружины 21, простирающейся почти по всей длине вкладыша стопы, и из установленной в области пятки с-образной пружины 2, которая своей верхней ветвью 2а с-профиля воспринимает нагрузку протеза, а своей нижней ветвью 2b с-профиля опирается на приподнятую кверху в направлении назад седловину 25, образованную задним концом основной пружины 21. Седловина 25 опирается на пяточный клин 26. Между верхней ветвью 2а с-профиля и размещенной позади нее опорной стойкой 27 предусмотрен связующий элемент в виде пневмоцилиндра 28 (подробно не показан), имеющего прогрессивную характеристику "нагрузка - деформация". Кроме того, между верхней ветвью 2а с-профиля и опорной стойкой 27 шарнирно установлен воздушный насос 12, напорный патрубок 12а которого присоединен к пневмоцилиндру 28.
Пневмоцилиндр 28 служит, таким образом, связующим звеном для изменения амортизационных свойств вкладыша стопы. Нагружение плюсны приводит за счет создаваемого им момента к расширению с-образной пружины 2. Возникающие при этом силы через связующее звено должны отводиться в основное крепление. Однако связующее звено должно действовать в обоих направлениях деформации с-образной пружины 2, то есть как при сгибании, так и при разгибании. При этом сгибание с-образной пружины вначале должно происходить как можно мягче, а при дальнейшей деформации должно усиливаться ограничивающее действие, оказываемое связующим звеном на деформацию с-образной пружины. Такая прогрессия выражается для пациента в облегченном перекате на плюсну, так как с-образная пружина, получающая поддержку за счет подобного связующего элемента, может быть выполнена более мягкой. Ощутимо меньшее для пациента сопротивление плюсны сказывается и на характере изменений моментов на лодыжке в фазе стояния. Для того, чтобы пациент, пользующийся искусственной стопой, мог активно управлять этой прогрессией автоматически в зависимости от соответствующей нагрузки на вкладыш стопы, в качестве устройства адаптации предусмотрен включенный параллельно пневмоцилиндру воздушный насос 12, присоединенный своим напорным патрубком к пневмоцилиндру 28. Последний на фиг.8 не показан; он расположен позади воздушного насоса 12. При этом целесообразно, чтобы поперечное сечение воздушного насоса 12 было меньше поперечного сечения пневмоцилиндра. Когда воздушный насос 12 нагнетает дополнительное количество воздуха в пневмоцилиндр 28, основное давление последнего, а значит, и его жесткость увеличиваются. Снижение давления в пневмоцилиндре может, в свою очередь, осуществляться за счет утечки.
Задняя опора связующего элемента, предусмотренная на опорной стойке 27, расположена предпочтительно в зоне ахиллова сухожилия. Передняя или же верхняя опора связующего элемента может находиться непосредственно на переходном устройстве 4.
Обобщая решение по фиг.8, можно, таким образом, констатировать следующее: связующий элемент управляет ограничением разжатия c-образной пружины 2 в зависимости от ее предыдущего сжатия, соответствующего нагружению пятки. Поскольку жесткость плюсны определяется последовательным включением с-образной пружины 2 и основной пружины 21, имеет место прогрессивная характеристика, управляемая прогрессивным ограничением хода связующего элемента. При этом преимущество данного решения состоит в том, что через воздействие на характеристику связующего элемента можно влиять на жесткость плюсны и ее параметрическую кривую. Более мягкая прогрессивная характеристика облегчает перекатывание ступни, но обеспечивает лишь ограниченную динамику ходьбы и ограниченный возврат энергии. Напротив, более жесткая линейная характеристика позволяет обеспечить лучшую динамику ходьбы, но является неудобной при низких скоростях ходьбы.
Реферат
Изобретение относится к медицинской технике и может быть использовано в протезостроении. Вкладыш содержит по меньшей мере один упругий элемент, определяющий амортизационную жесткость искусственной стопы, и устройство адаптации для изменения амортизационной жесткости этого упругого элемента перестановочным элементом, связанным с пружинным элементом, расположенным в пяточной части вкладыша. Воздействие на устройство адаптации осуществляется в зависимости от соответствующего нагружения вкладыша стопы пациентом, пользующимся искусственной стопой. Технический результат заключается в адаптации вкладыша стопы к условиям эксплуатации. 2 с. и 6 з.п.ф-лы, 8 ил.

Комментарии