Протез стопы с регулируемой функцией - RU2291676C2
Код документа: RU2291676C2
Чертежи


































Описание
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к высокофункциональному протезу стопы, обеспечивающему улучшенные динамические характеристики в ответ на действие прилагаемой силы.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Бессуставная искусственная стопа для протеза нижней конечности раскрыта Martin et al. в патенте США №5897594. В отличие от предшествующих решений, при которых искусственная стопа имеет жесткую конструкцию, обеспеченную сочленением для имитации функции голеностопного сустава, в бессуставной искусственной стопе Martin et al. используется упругий вкладыш стопы, который расположен внутри формованного изделия стопы. Вкладыш имеет приблизительно С-образный профиль в продольном срезе с отверстием сзади и принимает нагрузку протеза своим верхним С-плечом и посредством своего нижнего С-плеча передает указанную нагрузку на соединенную с ним пластинчатую пружину. Пластинчатая пружина, как видно снизу, имеет выпуклый профиль и проходит приблизительно параллельно области подошвы вперед за пределы вкладыша стопы в область кончика стопы. Изобретение Martin et al. основано на усовершенствовании бессуставной искусственной стопы в отношении демпфирования соударения пятки, эластичности, ходьбы от пятки к пальцам стопы и латеральной устойчивости, для того, чтобы, таким образом, обеспечить возможность пользователю ходить нормальным образом, причем намерение состояло в обеспечении возможности пользователю и нормально ходить, а также осуществлять физические упражнения и спортивные игры. Однако динамические характеристики указанной известной искусственной стопы ограничены. Существует потребность в протезе стопы с более совершенными функциональными характеристиками, имеющем улучшенные конструктивные признаки механики, которые могут улучшить выполнение людьми, перенесшими ампутацию стопы, спортивных мероприятий, включающих такие виды физической активности, как, например, бег, прыжки, спринтерский бег, старт бега, остановка и прерывистое движение.
Van L. Philips был предложен другой протез стопы, который, как полагают, обеспечивает людей, перенесших ампутацию стопы, быстротой и подвижностью при участии в широком разнообразии видов активности, которым ранее препятствовали структурные ограничения и соответствующие функциональные характеристики протезов предшествующего уровня техники. Полагают, что указанные известные стопы, которые, по сообщениям, можно использовать таким же образом, как и нормальную стопу пользователя, способны переносить бег, прыжки и другие виды активности (см., например, патенты США №№6071313, 5993488, 5899944, 5800569, 5800568, 5728177, 5728176, 5824112, 5593457, 5514185, 5181932 и 4822363).
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Для того чтобы обеспечить возможность спортсмену, перенесшему ампутацию стопы, достичь более высокого функционального уровня, существует потребность в высокофункциональном протезе стопы, имеющем усовершенствованную прикладную механику, причем стопа может функционально превосходить стопу человека, а также функционально превосходить протезы стопы предшествующего уровня техники. Спортсмен, перенесший ампутацию стопы, заинтересован в наличии высокофункционального протеза стопы, имеющего улучшенную прикладную механику, динамическую характеристику от высокого до низкого уровня и возможность регулировки совмещения, которую можно тонко настраивать для улучшения горизонтального и вертикального компонентов функционирования, которые по природе могут быть специфичными в зависимости от конкретных потребностей.
Протез стопы настоящего изобретения направлен на удовлетворение указанных потребностей. В соответствии с раскрытым здесь иллюстративным вариантом реализации протез стопы изобретения содержит проходящий в продольном направлении киль стопы, имеющий на одном конце передний отдел стопы, задний отдел стопы на противоположном конце и относительно длинный средний отдел стопы, проходящий между передним отделом стопы и задним отделом стопы, и в виде арки изогнутый вверх от них. Представлен также стержень голени, включающий в себя выпукло изогнутый вниз нижний конец. Регулируемое крепежное устройство прикрепляет изогнутый нижний конец стержня голени к изогнутому вверх в виде арки среднему отделу стопы киля стопы для образования области голеностопного сочленения протеза стопы.
Регулируемое крепежное устройство обеспечивает возможность регулировки совмещения стержня голени и киля стопы относительно друг друга в продольном направлении киля стопы для регулировки функции протеза стопы. Путем регулировки совмещения расположенных напротив изогнутого вверх в виде арки среднего отдела стопы киля стопы и выпукло изогнутого вниз нижнего конца стержня голени относительно друг друга в продольном направлении киля стопы, динамические характеристики и достигаемые в результате движения стопы меняются, становясь специфичными в зависимости от конкретных потребностей в отношении необходимых/желаемых горизонтальных и вертикальных линейных скоростей. Протез стопы, предназначенный для разнообразного использования, раскрыт с наличием высокой и низкой динамической характеристики, а также в виде двигательных характеристик в двух плоскостях, которые улучшают функциональные характеристики у людей, перенесших ампутацию стопы, принимающих участие в спортивных и/или развлекательных видах деятельности. Раскрыт также протез стопы, в частности для спринтерского бега.
Протез стопы может также содержать устройство для ограничения степени движения верхнего конца стержня голени в ответ на силу, нагружающую и разгружающую стержень голени во время использования протеза стопы. В одном варианте реализации устройство представляет собой блок поршня-цилиндра, присоединенный между верхним и нижним концами стержня голени и содержащий, по меньшей мере, одну сжатую жидкость для ограничения степени движения, а также демпфирования энергии, накапливаемой или высвобождаемой во время сжатия и растяжения стержня голени.
Указанные и другие задачи, признаки и преимущества настоящего изобретения становятся более очевидными в результате рассмотрения следующего подробного описания раскрытых иллюстративных вариантов реализации и сопровождающих чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
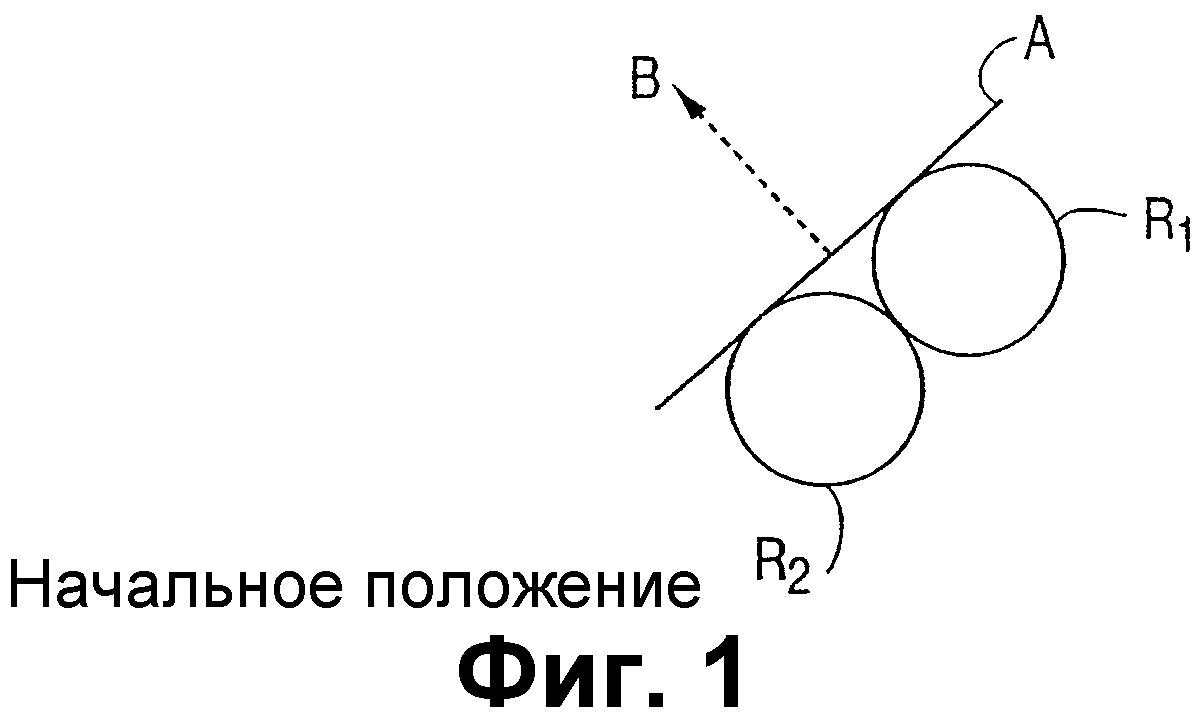
Фиг.1 - схематическая иллюстрация, представляющая два примыкающих радиуса кривизны R1 и R2, одна против другой, киля стопы и стержня голени протеза стопы изобретения, который создает динамическую характеристику и достигаемое в результате движение стопы при ходьбе в направлении стрелки В, которая перпендикулярна касательной линии А, соединяющей два радиуса.
Фиг.2 - вид, аналогичный фиг.1, но показывающий совмещение двух радиусов, которые были изменены в протезе стопы в соответствии с изобретением для увеличения горизонтального компонента и уменьшения вертикального компонента динамической характеристики и достигаемого в результате движения стопы при ходьбе таким образом, что стрелка В1, перпендикулярная касательной линии А1, направлена более горизонтально, чем в случае, изображенном на фиг.1.
Фиг.3 - вид сбоку протеза стопы в соответствии с иллюстративным вариантом реализации изобретения с адаптером пилона и присоединенным к нему пилоном для фиксации стопы к нижней части нижней конечности человека, перенесшего ампутацию стопы.
Фиг.4 - вид спереди протеза стопы с адаптером пилона и пилоном, изображенным на фиг.3.
Фиг.5 - вид сверху варианта реализации, показанного на фиг.3 и 4.
Фиг.6 - вид сбоку другого киля стопы изобретения, специально для спринтерского бега, который можно использовать в протезе стопы изобретения.
Фиг.7 - вид сверху киля стопы, изображенного на фиг.6.
Фиг.8 - вид снизу киля стопы в протезе стопы, изображенного на фиг.3, который обеспечивает высокую и низкую динамические характеристики, а также возможности движения в двух плоскостях.
Фиг.9 - вид сбоку дополнительного киля стопы изобретения протеза стопы, который можно, в частности, использовать для спринтерского бега людей, которые перенесли ампутацию стопы по Symes.
Фиг.10 - вид сверху киля стопы, изображенного на фиг.9.
Фиг.11 - еще один вариант киля стопы для протеза стопы изобретения для людей, которые перенесли ампутацию стопы по Symes, причем киль стопы предоставляет протез стопы, который обеспечивает высокую и низкую динамические характеристики, а также возможности движения в двух плоскостях.
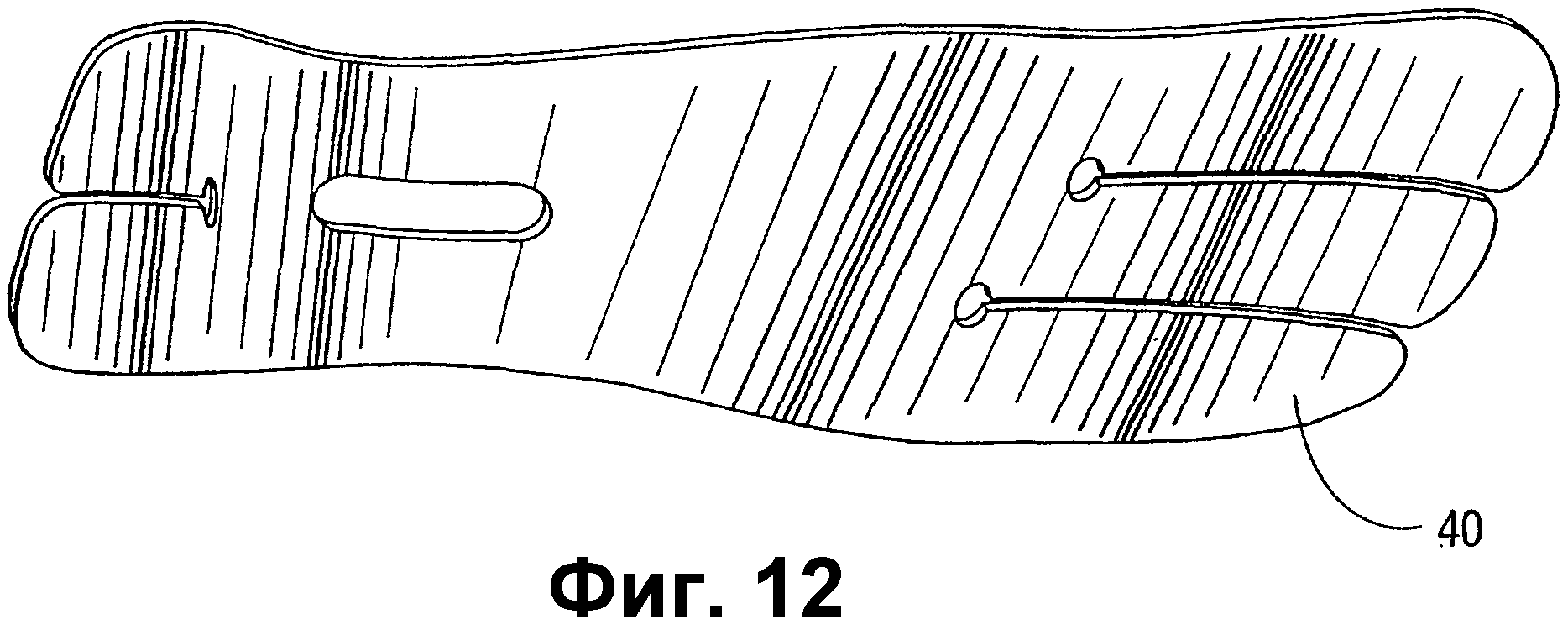
Фиг.12 - вид сверху киля стопы, изображенного на фиг.11.
Фиг.13 - вид сбоку киля стопы изобретения, в котором толщина киля сужается, т.е. прогрессивно уменьшается от среднего отдела стопы к заднему отделу стопы киля.
Фиг.14 - вид сбоку другого вида киля стопы, в котором толщина уменьшается от среднего отдела стопы по направлению и к переднему отделу стопы, и к заднему отделу стопы киля.
Фиг.15 - вид сбоку немного выше и спереди от стержня голени, спрофилированного в форме параболы протеза стопы изобретения, причем толщина стержня голени сужается по направлению к его верхнему концу.
Фиг.16 - вид сбоку, подобный фиг.15, но показывающий другой стержень голени, сужающийся от середины в направлении и к верхнему, и к нижнему концу.
Фиг.17 - вид сбоку С-образного стержня голени протеза стопы, причем толщина стержня голени сужается от середины в направлении и к верхнему, и к нижнему концу.
Фиг.18 - вид сбоку другого примера С-образного стержня голени для протеза стопы, причем толщина стержня голени прогрессивно уменьшается от его средней части к его верхнему концу.
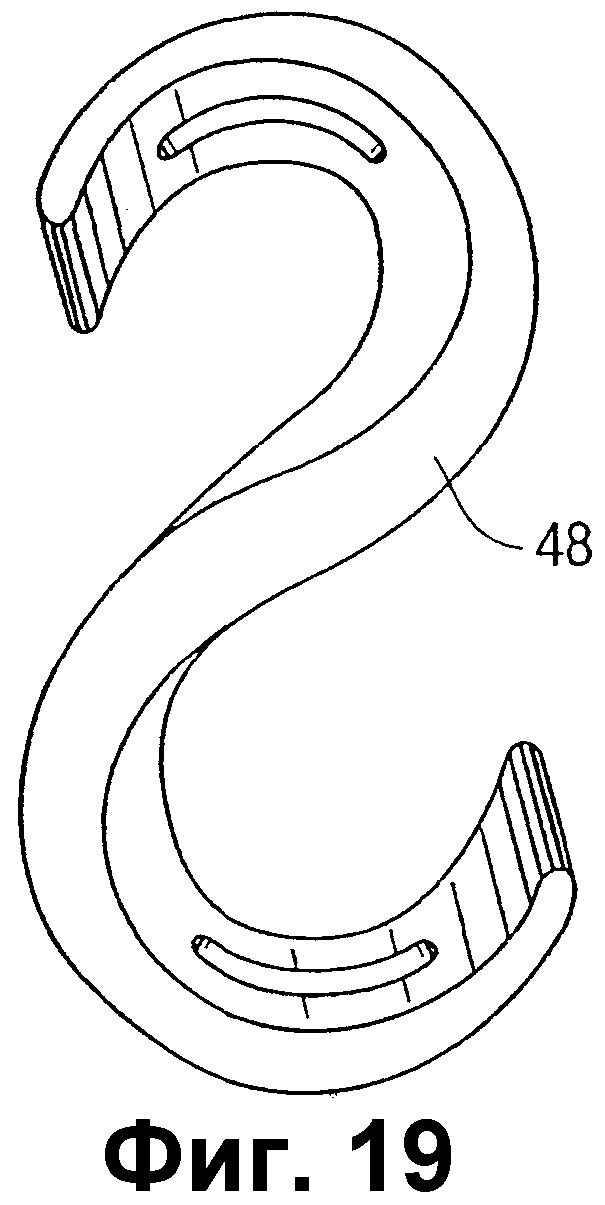
Фиг.19 - вид сбоку S-образного стержня голени для протеза стопы, причем толщина обоих концов прогрессивно уменьшается от его середины.
Фиг.20 - еще один пример S-образного стержня голени, который сужается по толщине только на его верхнем конце.
Фиг.21 - вид сбоку J-образного стержня голени, сужающегося на каждом конце, для протеза стопы изобретения.
Фиг.22 - вид, аналогичный фиг.21, но показывающий J-образный стержень голени, который прогрессивно уменьшается по толщине только по направлению к его верхнему концу.
Фиг.23 - вид сбоку, немного выше алюминиевого или пластикового соединительного элемента, используемого в регулируемом крепежном устройстве изобретения для прикрепления стержня голени к килю стопы, как показано на фиг.3.
Фиг.24 представляет собой вид сбоку и немного впереди от адаптера пилона, используемого на протезе стопы, изображенном на фиг.3-5, а также на фиг.28 и 29, для присоединения стопы к пилону, который предстоит прикрепить к ноге человека, перенесшего ампутацию стопы.
Фиг.25 - вид сбоку другого протеза стопы изобретения, аналогичного протезу на фиг.3, но показывающий использование соединительного элемента двумя разъединяемыми крепежами, расположенными с промежутком в продольном направлении и присоединяющими элемент соответственно к стержню голени и килю стопы.
Фиг.26 - увеличенный вид сбоку соединительного элемента, показанного на фиг.25.
Фиг.27 - увеличенный вид сбоку стержня голени протеза стопы, показанного на фиг.25.
Фиг.28 - вид сбоку еще одного иллюстративного варианта реализации протеза стопы изобретения, аналогичного протезам, показанными на фиг.3 и 25, в котором ограничивающее движение демпфирующее устройство присоединено между соответствующими концами стержня голени для ограничении степени движения верхнего конца стержня голени в ответ на силу, нагружающую и разгружающую стержень голени во время использования протеза стопы.
Фиг.29 - вид спереди протеза стопы при осмотре с левой стороны протеза стопы, изображенной на фиг.28, показывающий продольную бороздку в стержне голени стопы.
Фиг.30 - вид сзади протеза стопы, при осмотре с правой стороны протеза стопы, показанного на фиг.28.
Фиг.31 - вид снизу протеза стопы, показанного на фиг.28.
Фиг.32 - вид сбоку стержня голени и киля стопы протеза стопы, показанного на фиг.28, иллюстрирующий пример движения верхнего конца стержня голени в ответ на силу, нагружающую и разгружающую стержень голени во время использования протеза стопы.
Фиг.33 - вид сбоку еще одного иллюстративного варианта реализации протеза стопы, аналогичного протезу, показанному на фиг.28-32, за исключением того, что гибкую пластину используют для ограничения только степени растягивающего движения верхнего конца стержня голени.
Фиг.34 - вид сбоку другого варианта реализации протеза стопы с соединительным совмещающим устройством, расположенным на адаптере, присоединенном к верхнему концу стержня голени, для фиксации стопы к муфте протеза, прикрепленной к нижней конечности человека, перенесшего ампутацию голени, причем соединительное совмещающее устройство обеспечивает возможность регулировки скольжением от медиальной в латеральную сторону и спереди назад стопы относительно муфты протеза.
Фиг.35 - вид спереди протеза стопы, изображенного на фиг.34, осматриваемого с левой стороны стопы, как показано на фиг.34.
Фиг.36 - вид сзади протеза стопы, изображенного на фиг.34, осматриваемого с левой стороны стопы, как показано на фиг.34.
Фиг.37 - вид сверху другого киля стопы для протеза правой стопы изобретения, в котором задний конец стопы параллелен фронтальной плоскости, например, перпендикулярно продольной оси А-А стопы, и продольная ось F-F проксимальной вогнутостью заднего отдела стопы также перпендикулярна продольной оси А-А.
Фиг.38 - вид сбоку киля стопы, показанного на фиг.37, осматриваемого в направлении с латеральной стороны киля стопы.
Фиг.39 - вид сверху дополнительного киля стопы изобретения, аналогичного килю, показанному на фиг.37 и 38, но имеющего продольную ось F'-F' вогнутости своего заднего отдела стопы под тупым углом Δ' к продольной оси А-А, который делает латеральную распорку заднего отдела стопы эффективно более длинной и более гибкой, чем медиальная распорка, для содействия вывороту стопы при контакте пятки при ходьбе.
Фиг.40 - вид киля стопы, изображенного на фиг.39, осматриваемого с латеральной стороны киля стопы.
НАИЛУЧШИЙ СПОСОБ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Теперь, обращаясь к чертежам, видно, что протез стопы 1 в иллюстративном варианте реализации, изображенном на фиг.3-5, содержит проходящий в продольном направлении киль 2 стопы, имеющий передний отдел 3 стопы на одном конце, задний отдел 4 стопы на противоположном конце и относительно длинный средний отдел 5 стопы, проходящий между передним отделом стопы и задним отделом стопы и дугообразно изогнутый вверх. Средний отдел 5 стопы выпукло изогнут вверх по всему его продольному протяжению между передним отделом стопы и задним отделом стопы в иллюстративном варианте реализации.
Вертикально стоящий стержень 6 голени стопы 1 прикреплен у части выпукло изогнутого вниз его нижнего конца 7 к ближайшей задней поверхности среднего отдела 5 стопы киля посредством разъединяемого крепежа 8 и соединительного элемента 11. Крепеж 8 в иллюстративном варианте реализации представляет собой одиночный болт с гайкой и шайбой, но он может представлять собой размыкающийся зажим или другое крепежное средство для фиксированного расположения и удерживания стержня голени на киле стопы при затягивании крепежа.
Продольно проходящее отверстие 9 образовано в ближайшей задней поверхности среднего отдела 5 стопы киля (см. фиг.8). Продольно проходящее отверстие 10 также образовано в изогнутом нижнем конце 7 стержня 6 голени, как отверстие, показанное, например, на фиг.15. Разъединяемый крепеж 8 проходит через отверстия 9 и 10 для обеспечения возможности регулировки совмещения стержня голени и киля стопы относительно друг друга в продольном направлении (линия А-А на фиг.5), когда крепеж 8 ослаблен или разомкнут для регулировки функции протеза стопы, специфичной для конкретной потребности. Так, крепеж 8, соединительный элемент 11 и продольно проходящие отверстия 9 и 10 составляют регулируемое крепежное устройство для прикрепления стержня голени к килю стопы для образования области голеностопного сочленения протеза стопы.
Эффект регулировки совмещения стержня 6 голени и киля 2 стопы виден при рассмотрении фиг.1 и 2, на которых два радиуса R1 и R2, один за другим, представляют прилегающие, обращенные друг к другу, куполообразные или выпукло изогнутые поверхности среднего отдела 5 киля стопы и стержня 6 голени. Когда два таких радиуса рассматриваются один рядом с другим, существует возможность движения перпендикулярно касательной линии А на фиг.1, А1 на фиг.2, прочерченной между двумя радиусами. Взаимоотношение между указанными двумя радиусами определяет направление совершаемого в результате движения. Как следствие, приложение силы динамической характеристики стопы 1 зависит от данной связи. Чем больше радиус выпуклости, тем больше динамическая характеристика. Однако, чем компактнее радиус, тем быстрее он реагирует.
Возможность совмещения стержня голени и киля стопы в протезе стопы изобретения обеспечивает возможность сдвига радиусов таким образом, что осуществляется воздействие на горизонтальную и вертикальную линейную скорость при спортивных видах функционирования стопы. Например, для обеспечения возможности развивать горизонтальную линейную скорость протезом стопы 1, изменение совмещения может воздействовать на взаимоотношение между радиусом стержня голени и радиусом киля стопы. То есть для улучшения характеристики горизонтальной линейной скорости нижний радиус R2 киля стопы изготовлен дистальнее, чем его исходное положение (фиг.2, в сравнении с фиг.1). Это изменяет динамические характеристики и совершаемые в результате движения стопы 1, делая их более горизонтально направленными, а в результате при аналогичных прилагаемых силах может быть достигнута большая горизонтальная линейная скорость.
Посредством практического использования человек, перенесший ампутацию стопы, может найти установку для каждого вида деятельности, которая удовлетворяет его/ее нужды, поскольку указанные нужды относятся к горизонтальным и вертикальным линейным скоростям. Например, прыгун и баскетболист нуждаются в большем вертикальном подъеме, чем бегун-спринтер. Соединительный элемент 11 представляет собой пластиковое или алюминиевое совмещающее соединение (см. фиг.3, 4 и 23), расположенное в виде слоя между прикрепленным килем 2 стопы и стержнем 6 голени. Разъединяемый крепеж 8 проходит через отверстие 12 в соединительном элементе. Соединительный элемент проходит вдоль прикрепленной части стержня голени и ближайшей задней поверхности среднего отдела 5 киля стопы.
Изогнутый нижний конец 7 стержня 6 голени имеет форму параболы с наименьшим радиусом кривизны параболы, расположенным на нижнем конце и проходящим вверх и исходно впереди в профиле параболы. Обращенная назад вогнутость образована изгибом стержня голени, как изображено на фиг.3. Форма параболы имеет преимущества в том, что она имеет увеличенные динамические характеристики при создании улучшенной горизонтальной линейной скорости, связанной с относительно большими радиусами ее проксимальной концевой части при одновременно меньшем радиусе изгиба на ее нижнем конце для более быстрых динамических характеристик. Большие радиусы изгиба на верхнем конце параболического профиля обеспечивают возможность того, что касательная линия А, объясненная со ссылкой на фиг.1 и 2, остается более вертикально ориентированной при изменениях совмещения, что создает улучшенную горизонтальную линейную скорость.
Спрофилированный в форме параболы стержень голени реагирует на силы, действующие со стороны грунта при первоначальном контакте при ходьбе человека, сжатием или скручиванием на себе самом. Это уменьшает радиусы кривой параболы, и, как следствие, уменьшается сопротивление сжатию. Напротив, поскольку стержень голени, спрофилированный в форму параболы, реагирует на реактивные силы при отрыве пятки от грунта (GRF) при ходьбе человека растягиванием, это увеличивает радиусы параболической кривой, и, как следствие, сопротивление гораздо больше, чем указанное выше сопротивление сжатию. Указанные сопротивления связаны с функцией передней и задней группы мышц голени человека при ходьбе. При первоначальном контакте плоскости стопы во время ходьбы меньшая передняя группа мышц голени реагирует на GRF эксцентричным сокращением для опускания стопы на грунт, и создается момент дорзального сгибания. От положения стопы всей плоскостью на грунте до отрыва пальцев стопы от грунта более крупная задняя группа мышц икры реагирует на GRF также эксцентричным сокращением, и создается больший момент подошвенного сокращения. Размер данного момента связан с различием размера передней и задней группы мышц голени. Как следствие, имитируется сопротивление стержня голени протеза на моменты дорзального сгибания и подошвенного сгибания и достигается нормальная ходьба. Способность параболических кривых изменять сопротивление имитирует функцию мускулатуры голени человека при физической активности человека в виде ходьбы, бега и прыжков, и, как следствие, достигается эффективность использования протеза.
Человек идет со скоростью приблизительно 3 мили/ч. Бегун, пробегающий милю за 4 мин, бежит со скоростью 12 миль/ч, а спринтер, пробегающий 100 м за 10 с, бежит со скоростью 21 миля/ч. Это представляет собой соотношение 4 к 7. Горизонтальный компонент каждой задачи больше, поскольку скорость функционирования возрастает. Как следствие, можно заранее определить размер радиусов стержня голени протеза. Бегуну-спринтеру необходим параболический изогнутый стержень голени, который больше в 7 раз. Указанное взаимоотношение показывает, как определить радиусы параболы для ходоков, бегунов и спринтеров. Это существенно, потому что у бегунов-спринтеров имеется увеличенный диапазон требований к движению, и их стержень голени должен быть прочнее для восприятия увеличенных нагрузок, связанных с данным видом активности. Более широкий или крупный параболический стержень голени будет представлять собой относительно более плоскую кривую, что эквивалентно большей структурной прочности с увеличенным диапазоном движения.
Адаптер 13 пилона соединен с верхним концом стержня 6 голени крепежами 14. Адаптер 13 в свою очередь фиксирован к нижнему концу пилона 15 крепежами 16. Пилон 15 фиксирован к нижней конечности человека, перенесшего ампутацию стопы, опорной структурой (не показана), прикрепленной к культе нижней конечности.
В иллюстративном варианте реализации передний отдел стопы, средний отдел стопы и задний отдел стопы киля 2 стопы образованы из одного блока упругого материала. Например, можно использовать твердый блок материала, пластичного по природе, имеющего характеристики удерживания формы при отклонении под действием реактивных сил со стороны грунта. Конкретнее, киль стопы, а также стержень голени можно изготовить из ламинированного композитного материала, имеющего усиливающие волокна, ламинированные полимерным матричным материалом, В частности, для изготовления киля стопы, а также стержня голени можно использовать высокопрочный графит, ламинированный эпоксидными термореактивными смолами, или подвергнутый экструзии пластик, используемый под торговым названием Delran, или дегазированные полиуретановые сополимеры. Функциональные качества, связанные с указанными материалами, обеспечивают высокую прочность при низкой массе и минимальную ползучесть. Термореактивные смолы ламинируют в вакууме с использованием стандартов протезной промышленности. Полиуретановые сополимеры можно выливать в негативные формы, и подвергнутый экструзии пластик можно обрабатывать на станке. Каждый используемый материал имеет свои преимущества и недостатки. Было обнаружено, что ламинированный композитный материал для киля стопы и стержня голени может также преимущественно представлять собой полученный термоформовкой (препрег) ламинированный композитный материал, изготовленный по промышленным стандартам, с армирующим волокном и термопластической полимерной матрицей для превосходящих механических качеств растяжения. Подходящим имеющимся в продаже композитным материалом указанного вида является CYLON®, изготавливаемый Cytec Fiberite Inc. of Havre de Grace, Maryland.
Все физические свойства упругого материала, поскольку они относятся к жесткости, гибкости и прочности, определяются толщиной материала. Более тонкий материал будет легче прогибаться, чем более толстый материал такой же плотности. Используемый материал, а также физические свойства связаны с характеристиками соотношения жесткости и гибкости киля протеза и стержня голени. В иллюстративном варианте реализации, показанном на фиг.3-5, толщина киля и стержня голени равномерна или симметрична, но толщина по длине указанных компонентов может варьировать, как обсуждается ниже, как, например, изготовлением областей заднего отдела стопы и переднего отдела стопы более толстыми и более реагирующими на прогиб области среднего отдела стопы.
Для содействия обеспечению стопы 1 высокой и низкой динамической характеристикой средний отдел 5 стопы образован продольной аркой так, что медиальная сторона продольной арки имеет относительно более высокую динамическую характеристику, чем латеральная сторона продольной арки. Для этого в иллюстративном варианте реализации медиальная сторона вогнутости продольной арки больше по радиусу, чем ее латеральная сторона.
Взаимоотношение между размерами медиального и латерального радиусов вогнутости продольной арки среднего отдела 5 стопы далее определяется как передняя и задняя подошвенные поверхности, несущие нагрузку массы тела, киля 2 стопы. Линия Т1-Т2 на переднем сечении 5 на фиг.8 представляет переднюю подошвенную поверхность, несущую нагрузку массы тела. Линия Р1-Р2 представляет заднюю подошвенную поверхность, несущую нагрузку массы тела, обозначенную цифрой 5. Подошвенные поверхности, несущие нагрузку массы тела, на латеральной стороне стопы были бы представлены расстоянием между Т1-Р1. Подошвенные поверхности, несущие нагрузку массы тела, на медиальной стороне 2 стопы представлены расстоянием между Р2-Т2. Расстояния, представленные Т1-Р1 и Р2-Т2, определяют размер радиусов, и, в результате, определяется взаимоотношение между высокой и низкой динамической характеристикой, и на него может влиять схождение или расхождение указанных двух линий Т1-Т2 в Р1-Р2. В результате в структурном дизайне можно определить высокую и низкую динамическую характеристику.
Задний конец 17 заднего отдела 4 стопы спрофилирован в изогнутую вверх арку, которая реагирует на реактивные силы при упоре в грунт во время удара пятки сжатием для амортизации. Пятка, образованная задним отделом 4 стопы, сформирована с задним латеральным углом 18, который находится дальше назад и в сторону, чем средний угол 19, для содействия вывороту заднего отдела стопы во время фазы начального контакта при ходьбе. Передний конец 20 переднего отдела 3 стопы спрофилирован в изогнутую вверх арку для имитации пальцев стопы человека, разогнутых в дорзальном направлении в положении подъема пятки и разгибания пальцев стопы на поздней фазе отталкивания при ходьбе. Резиновые или пенистые накладки 53 и 54 предоставлены на нижней поверхности переднего отдела стопы и заднего отдела стопы в качестве амортизаторов.
Улучшенная возможность движения в двух плоскостях протеза стопы создается отверстиями 21 и 22 компенсационных соединений, проходящих через передний отдел 3 стопы между его дорзальной и подошвенной поверхностями. Компенсационные соединения 23 и 24 проходят вперед от соответствующих отверстий к переднему краю переднего отдела стопы для образования медиальной, средней и латеральной компенсационных распорок 25-27, которые создают возможность улучшенного движения в двух плоскостях переднего отдела стопы киля стопы. Отверстия 21 и 22 компенсационных соединений расположены по линии В-В на фиг.5, в поперечной плоскости, которая проходит под углом α 35° к продольной оси А-А киля стопы при расположении отверстия 21 медиального компенсационного соединения впереди от отверстия 22 латерального компенсационного соединения.
Угол α линии В-В к продольной оси А-А на фиг.5 может составлять всего 15° и, тем не менее, обеспечивать высокую и низкую динамическую характеристику. По мере того как указанный угол α изменяется, так же должен изменяться угол Z линии Т1-Т2 на фиг.8. Отверстия 21 и 22 компенсационных соединений при проекции на сагиттальную плоскость наклонены под углом 45° к поперечной плоскости, причем дорзальная сторона отверстий находится впереди от подошвенной стороны. При указанном устройстве расстояние от разъединяемого крепежа 8 до отверстия 22 латерального компенсационного соединения короче, чем расстояние от разъединяемого крепежа до отверстия 21 медиального компенсационного соединения так, что латеральная часть протеза стопы 1 имеет более короткое плечо рычага пальцев стопы, чем медиальное, для обеспечения высокой и низкой динамической характеристики среднего отдела стопы. Кроме того, расстояние от разъединяемого крепежа 8 до латеральной поверхности, несущей нагрузку массы тела, представленное линией Т1, короче, чем расстояние от разъединяемого крепежа до медиальной подошвенной поверхности, несущей нагрузку массы тела, представленное линией Т2, так что латеральная часть протеза стопы 1 имеет более короткое плечо рычага пальцев стопы, чем медиальное, для обеспечения высокой и низкой динамической характеристики среднего отдела стопы.
Передняя часть заднего отдела 4 киля 2 стопы, кроме того, содержит отверстие 28 компенсационного соединения, проходящее через задний отдел 4 стопы между его дорзальной и подошвенной поверхностями. Компенсационное соединение 29 проходит сзади от отверстия 28 к заднему краю заднего отдела стопы для образования компенсационных распорок 30 и 31. Они создают улучшенную возможность движения в двух плоскостях заднего отдела стопы.
Дорзальная сторона среднего отдела стопы 5 и передний отдел 3 киля 2 стопы образуют обращенную вверх вогнутость 32, показанную на фиг.3, так, что она при функции имитирует пятую лучевую ось движения стопы человека. То есть вогнутость 32 имеет продольную ось С-С, которая ориентирована под углом β от 15° до 35° к продольной оси А-А киля стопы, причем медиальная часть расположена впереди от латеральной для содействия движению пятого луча при ходьбе, как в косой оси низшей передачи вращения от второй до пятой плюсневых костей в стопе человека.
Важность возможности движения в двух плоскостях можно оценить, когда человек, перенесший ампутацию стопы, идет по неровной почве или когда спортсмен упирается на медиальную или латеральную часть стопы. Направление вектора силы, действующей со стороны грунта, изменяется от сагиттальной ориентации до наличия ее компонента во фронтальной плоскости. Грунт будет оказывать отталкивающее действие, направленное в медиальную сторону, т.е. в противоположном направлении относительно действия стопы, отталкивающейся в латеральную сторону. Вследствие этого стержень голени отклоняется в медиальную сторону, и воздействие массы прилагается на медиальную структуру киля стопы. В ответ на указанные силы давления распорки 25 и 31 медиального компенсационного соединения киля 2 стопы сгибаются в дорзальном направлении (отклоняются вверх) и выворачиваются, а распорки 27 и 30 латерального компенсационного соединения сгибаются в подошвенном направлении (отклоняются вниз) и вворачиваются внутрь. Указанное движение пытается поставить подошвенную поверхность стопы плоско на грунт (подошвенный этап).
Другой киль 33 стопы изобретения, в частности, для спринтерского бега, можно использовать в протезе стопы изобретения (см. фиг.6 и 7). Центр тяжести тела при спринте становится ориентированным исключительно в сагиттальной плоскости. Протезу стопы нет необходимости иметь низкую динамическую характеристику. Вследствие этого наружная вращательная ориентация на 15°-35° продольной оси переднего отдела стопы и вогнутость среднего отдела стопы, подобная таковой в киле 2 стопы, не требуется. Скорее ориентация продольной оси вогнутости D-D должна стать параллельной фронтальной плоскости, как изображено на фиг.6 и 7. Это обеспечивает возможность реакции спринтерской стопы только в сагиттальном направлении. Кроме того, ориентация отверстий 34 и 35 компенсаторных соединений в переднем и среднем отделах стопы по линии Е-Е параллельна фронтальной плоскости, т.е. латеральное отверстие 35 смещается вперед и по одной линии с медиальным отверстием 34 и параллельно фронтальной плоскости. Передний конец 36 киля 33 стопы также изготовлен параллельно фронтальной плоскости. Задняя концевая пяточная область 37 киля стопы также параллельна фронтальной плоскости. Указанные модификации отрицательным образом воздействуют на возможности многообразного использования протеза стопы. Однако ее функциональные характеристики становятся специфичными в зависимости от конкретной потребности. Другое изменение киля 33 спринтерской стопы заключено в пальцевой, лучевой области переднего отдела стопы, где сгибание в дорзальном направлении на 15° киля 2 стопы увеличено до 25°-40° сгибания в дорзальном направлении киля 33 стопы.
На фиг.9 и 10 показан еще один киль 38 стопы изобретения для протеза стопы, который можно, в частности, использовать для спринтерского бега человеком, перенесшим ампутацию стопы по Symes. Для этого средний отдел киля 38 стопы включает в себя заднюю, обращенную вверх вогнутость 39, в которой изогнутый нижний конец стержня голени прикреплен к килю стопы посредством разъединяемого крепежа. Указанный киль стопы могут использовать все люди, перенесшие ампутацию нижней конечности. Киль 38 стопы подходит к более длинной культе конечности, связанной с уровнем ампутации по Symes. Его функциональные характеристики отчетливо более быстрые в плане возможностей динамической характеристики. Его использование не специфично для данного уровня ампутации. Его можно использовать при всех ампутациях через большеберцовую и бедренную кость. Киль 40 стопы в иллюстративном варианте реализации, показанном на фиг.11 и 12, имеет вогнутость 41 для людей, перенесших ампутацию стопы по Symes, причем киль стопы обеспечивает протез стопы высокой и низкой динамической характеристикой, а также возможностями движения в двух плоскостях, подобных тем, которые имеются в иллюстративном варианте реализации, показанном на фиг.3-5 и 8.
Функциональные характеристики нескольких килей стоп для протеза стопы 1 связаны с признаками формы и конструкции, поскольку они относятся к вогнутостям, размеру радиусов, расширению, сжатию и физическим свойствам материала, и все указанные свойства связаны и реагируют на силы, действующие со стороны грунта при ходьбе, беге и прыжках.
Киль 42 стопы, показанный на фиг.13, аналогичен килю в иллюстративном варианте реализации, показанном на фиг.3-5 и 8, за исключением того, что толщина киля стоп сужается от среднего отдела стопы к задней части заднего отдела стопы. Толщина киля 43 стопы на фиг.14 прогрессивно уменьшается или сужается и на его переднем, и на заднем конце. Аналогичные изменения толщины показаны в стержне 44 голени на фиг.15 и в стержне 45 голени на фиг.16, которые можно использовать в протезе стопы 1. Каждая конструкция киля стопы и стержня голени дает различные функциональные результаты, поскольку указанные функциональные результаты связаны с горизонтальной и вертикальной линейными скоростями, которые специфичны для улучшения функции в зависимости от конкретных потребностей, связанных с занятиями спортом. Возможность использования множества конфигураций и регулировок стержня голени при установках между килем стопы и стержнем голени создает соотношение между протезом стопы и стержнем голени, которое обеспечивает человеку, перенесшему ампутацию стопы, и/или специалисту по протезированию возможность регулирования протеза стопы для максимальной функциональной эффективности при выбранном виде спортивной и развлекательной деятельности из их широкого многообразия.
Другие стержни стопы для протеза стопы 1 показаны на фиг.17-22 и включают в себя С-образные стержни 46 и 47 голени, S-образные стержни 48 и 49 голени и J-образные стержни 50 и 51 голени. Верхний конец стержня голени может также иметь прямой вертикальный конец с пирамидальной крепежной пластиной, прикрепленной к данному проксимальному концу. Вставляемую пирамиду можно прикрепить к вертикальному концу стержня голени болтом, проведенным через него. Пластиковые или алюминиевые наполнители для приема проксимальной вставляемой пирамиды и дистального киля стопы могут быть также предоставлены в удлиненных отверстиях на проксимальном и дистальном концах стержня голени. Протез стопы изобретения представляет собой модульное устройство, предпочтительно сконструированное из стандартизированных элементов или размеров для обеспечения гибкости и разнообразия при использовании.
Все виды активности в виде бега по беговой дорожке происходят в направлении против часовой стрелки. Другой, необязательный признак изобретения учитывает силы, действующие на стопу, продвигающуюся по такой кривой траектории. Центростремительное ускорение действует в направлении центра вращения, где объект движется по кривой траектории. К действию энергии применим третий закон Ньютона. Существует равная и противоположная реакция. Так, для каждой силы «стремящейся к центру», существует сила, «стремящаяся от центра». Центростремительная сила действует в направлении центра вращения, а центробежная сила, реактивная сила, действует в сторону от центра вращения. Если спортсмен бежит по кривой на дорожке, центростремительная сила тянет бегуна в направлении центра кривой, в то время как центробежная сила тянет в сторону от центра кривой. Для противодействия центробежной силе, которая пытается отклонить бегуна наружу, бегун наклоняется внутрь. Если направление вращения бегуна на дорожке происходит всегда против часовой стрелки, то левая сторона находится внутри дорожки. Как следствие, в соответствии с признаком настоящего изобретения, левая сторона стержней голени правого и левого протеза стопы может быть изготовлена более тонкой, чем правая сторона, и можно улучшить выполнение бега по кривой бегуна, перенесшего ампутацию стопы.
Каждый из килей 2, 33, 38, 42 и 43 стопы в нескольких вариантах реализации имеет длину 29 см с пропорциями обувной колодки стопы 1, показанной в уменьшенном масштабе на фиг.3, 4 и 5 и в нескольких видах различных стержней голени и килей стопы. Однако, как легко понять специалисту в данной области, определенные размеры протеза стопы можно менять в зависимости от размера, массы тела и других характеристик перенесшего ампутацию человека, которому подбирают протез стопы.
Теперь будет рассмотрена работа протеза стопы 1 в циклах динамических фаз походки при ходьбе и беге. Три закона движения Ньютона, которые относятся к закону инерции, ускорения и действия-реакции, представляют собой основу для кинематики движения в стопе. По третьему закону Ньютона, закону действия-реакции, известно, что грунт отталкивает стопу в направлении, равном и противоположном направлению, в котором стопа отталкивается от грунта. Указанные силы известны как реактивные силы грунта. Проведено много научных исследований форм активности человека в виде ходьбы, бега и прыжков. Исследования с плитой пуансона показывают, что при ходьбе действует третий закон Ньютона. По данным исследованиям известно направление, в котором грунт отталкивает стопу.
Динамическую фазу активности в виде ходьбы/бега можно далее разбить на фазы замедления и ускорения. Когда протез стопы касается грунта, стопа отталкивается вперед от грунта, а грунт отталкивает назад в равном и противоположном направлении - то есть грунт отталкивает протез стопы назад. Данная сила заставляет протез стопы двигаться. Динамический фазовый анализ видов активности в форме ходьбы и бега начинается с точки контакта, представляющей собой задний латеральной угол 18 (фиг.5 и 8), который смещен больше назад и в латеральную сторону, чем медиальная сторона стопы. Данное смещение при начальном контакте вызывает выворот стопы и подошвенное сгибание стержня голени. Стержень голени всегда стремится к положению, которое передает массу тела через его стержень, например, он имеет тенденцию располагать свой длинный вертикальный элемент в положении для противодействия силам, действующим со стороны грунта. Вот почему он движется назад и сгибается в подошвенном направлении для противодействия реактивной силе грунта, которая толкает стопу назад.
Силы, действующие со стороны грунта, вызывают сжатие стержней 44, 45, 46, 47, 50 и 51 голени, причем проксимальный конец движется назад. При стержнях 48, 49 голени дистальная 1/2 стержня голени сжималась бы в зависимости от ориентации дистальных вогнутостей. Если дистальная вогнутость сжата в ответ на действие GRF, проксимальная вогнутость растянется, и весь стержень голени будет двигаться в направлении назад. Силы, действующие со стороны грунта, вызывают сжатие стержня голени, причем проксимальный конец движется назад. Нижний, компактный радиус стержня голени сжимается, имитируя подошвенное сгибание в голеностопном суставе человека, а передний отдел стопы снижается прижиманием к грунту. В то же самое время задняя сторона киля, представленная задним отделом 4 стопы, изображенная обозначением 17, сжимается вверх посредством сжатия. Обе указанные силы сжатия действуют в качестве амортизаторов. Указанная амортизация дополнительно усиливается смещенной задней латеральной пяткой, вызывающей выворот стопы, который также действует в качестве амортизатора, как только стержень голени прекращает движение в положение подошвенного сгибания, и при отталкивании стопы грунтом назад.
Сжатые элементы киля стопы и стержня голени начинают разгружаться - то есть они стремятся к своей первоначальной форме, и накопленная энергия высвобождается, что вызывает движение проксимального конца стержня голени вперед ускоренным образом. По мере того как стержень голени приближается к своему вертикальному начальному положению, силы, действующие со стороны грунта, изменяются от сил, отталкивающих стопу назад, в силы, отталкивающие стопу вертикально вверх. Поскольку в протезе стопы на задней и передней поверхности имеются области, несущие нагрузку массы тела, и указанные области соединены не несущей нагрузку массы тела длинной средней частью, спрофилированной в форме арки, то вертикально направленные силы от протеза вызывают нагрузку растяжением длинной средней арочной части. Задняя и передняя поверхности, несущие нагрузку массы тела, расходятся. Указанные вертикально направленные силы накапливаются в длинной арочной средней части стопы, по мере того как силы, действующие со стороны грунта, перемещаются от сил, представляющих собой силы, вертикальные по природе, в силы, направленные вперед. Стержень голени растягивается, имитируя дорзальное сгибание голеностопного сустава. Это вызывает смещение оси вращения протеза стопы с передней подошвенной поверхности, несущей нагрузку массы тела. По мере того как происходит разгрузка массы тела, длинная арка среднего отдела 5 стопы изменяется от растянутого состояния и стремится к своей первоначальной форме, что создает имитированное сокращение группы подошвенных мышц-сгибателей. Это высвобождает накопленную энергию вследствие вертикального сжатия, обеспечивая улучшенные возможности растяжения.
Длинная дуга киля стопы и стержень голени сопротивляются растяжению своих соответствующих структур. Вследствие этого продвижение вперед стержня голени останавливается, и ось вращения стопы начинает смещаться в сторону от несущей нагрузку массы тела области передней подошвенной поверхности. Растяжение среднего отдела киля стопы имеет такую высокую и низкую динамическую характеристику, как в случае килей стоп в иллюстративных вариантах реализации, показанных на фиг.3-5, 8, 11, 12, 13, 14. Поскольку переходная область от среднего к переднему отделу стопы указанных килей стоп отклоняется на 15°-35° наружу от длинной оси стопы, то средняя, длинная арка длиннее, чем латеральная длинная арка. Это важно, потому что в нормальной стопе во время ускорения или замедления используется средняя сторона стопы.
Более длинная средняя арка протеза стопы имеет большую динамическую характеристику, чем латеральная. Латеральное более короткое пальцевое плечо рычага используется при ходьбе или беге на более медленных скоростях. Центр тяжести тела движется через пространство по синусоидальной кривой. Он движется в среднем, латеральном, проксимальном и дистальном направлении. При ходьбе или беге на более медленных скоростях центр тяжести тела движется в большей степени в среднем и латеральном направлении, чем при быстрой ходьбе или беге. Кроме того, момент инерции меньше и меньше способность преодоления более высокой динамической характеристики. Протез стопы изобретения приспособлен использовать указанные принципы в прикладной механике.
Кроме того, на средней динамической фазе цикла ходьбы человека центр тяжести тела находится так далеко в латеральном направлении, насколько он может сместиться в указанном направлении. От средней динамической фазы до отрыва пальцев стопы от грунта центр тяжести тела (BCG) движется от латеральной стороны к медиальной. Как следствие, центр тяжести тела продвигается над латеральной стороной киля 2 стопы. Сначала (более низкая передача) и по мере того как BCG продвигается вперед, он движется в медиальном направлении на киле 2 стопы (высокая передача). Как следствие, киль 2 протеза стопы обладает эффектом автоматической передачи. То есть он стартует на низкой передаче и движется к высокой передаче с каждым шагом, который делает человек, перенесший ампутацию стопы.
Поскольку силы, действующие со стороны грунта, отталкивают вперед протез стопы, отталкивающий грунт назад, по мере того как пятка начинает поднимать переднюю часть длинной дуги среднего отдела стопы, последняя спрофилирована таким образом, чтобы указанные направленные назад силы прикладывались перпендикулярно к ее подошвенной поверхности. Это наиболее эффективный и эффектный способ приложения указанных сил. То же можно сказать о задней части заднего отдела протеза стопы. Она также спрофилирована таким образом, чтобы направленным назад силам, действующим со стороны грунта, при начальном контакте противодействовала подошвенная поверхность киля стопы, направленная перпендикулярно к направлению их прилагаемой силы.
На более поздних стадиях подъема пятки, при ходьбе и беге с отрывам пальцев стоп от грунта, лучевая область переднего отдела стопы отклоняется назад на 15°-35°. Данная проходящая вверх арка позволяет направленным вперед силам, действующим со стороны грунта, сжимать данную область стопы. Сопротивление данному сжатию меньше, чем растяжению, и происходит плавный переход в фазу качания ходьбы и бега на протезе стопы. На более поздних стадиях динамической фазы ходьбы растянутый стержень голени и растянутая длинная дуга среднего отдела стопы высвобождают накопленную в них энергию, содействуя проталкиванию вперед центра тяжести тела человека, перенесшего ампутацию стопы.
Один из главных механизмов сообщения движения вперед при ходьбе человека называется фазой активного тягового усилия. По мере того как пятка поднимается, масса тела теперь находится впереди от опорной конечности, и центр тяжести падает. По мере того как вектор массы тела переходит через балансир переднего отдела стопы (линия С-С на фиг.5), происходит ускорение вниз, что приводит к самой высокой вертикальной силе, получаемой телом. Ускорение нижней конечности впереди от лодыжечной области при подъеме пятки приводит к сдвигу назад по грунту. По мере того как центр давления сдвигается впереди от оси вращения головок плюсневых костей, эффект представляет собой постоянно увеличивающееся скручивание при сгибании в дорзальном направлении. Это создает ситуацию полного падения вперед, которая генерирует основную силу продвижения, используемую при ходьбе. Признаки эффективной функции голеностопного сустава во время активного продвижения вперед представляют собой подъем пятки, минимальное движение в суставе и нейтральное положение лодыжечной области. Устойчивый средний отдел стопы существен для нормальной последовательности движений при подъеме пятки.
Как отмечено ранее, в нескольких вариантах реализации задняя сторона области заднего и переднего отдела стопы киля стопы включают в себя отверстия компенсационных соединений и распорки компенсационных соединений. Ориентация отверстий компенсационных соединений действует в качестве соединенного под углом в 45° шарнира, и возможности движения в двух плоскостях улучшаются для улучшения общих характеристик контакта подошвенной поверхности стопы при ходьбе по неровной почве.
Кили стопы после ампутации по Symes, показанные на фиг.9-12, отчетливо отличаются по возможностям динамической характеристики, поскольку указанные возможности связаны с активностью в виде ходьбы, бега и прыжков. Указанные кили стоп отличаются по четырем отличительным признакам. Они включают в себя наличие вогнутости в ближайшей, задней части среднего отдела стопы для лучшего соответствия форме дистальной культи конечности после ампутации по Symes, чем плоской поверхности. Данная вогнутость также снижает высоту киля стопы, которая соответствует более длинной культе нижней конечности, которая связана с уровнем ампутации по Symes. Вогнутость совмещения требует, чтобы соответствующие передний и задний радиусы изогнутой в виде арки средней части киля стопы были более агрессивными и меньшими по размеру. Вследствие этого все радиусы длинной дуги среднего отдела стопы и радиусы заднего отдела стопы компактнее и меньше. Это значимо воздействует на динамические характеристики. Меньшие радиусы создают меньшую динамическую характеристику. Однако протез стопы быстрее реагирует на все указанные выше силы, действующие со стороны грунта, при ходьбе, беге и прыжках. Результатом является более быстрая стопа с меньшей динамической характеристикой.
Улучшенную спортивную функцию, специфичную для конкретной потребности, можно достичь изменениями совмещения с использованием протеза стопы изобретения, поскольку указанные изменения совмещения воздействуют на вертикальные и горизонтальные компоненты каждой задачи. Стопа человека представляет собой многофункциональную единицу - она ходит, бегает и прыгает. С другой стороны, структура стержня стопы в виде большеберцовой и малоберцовой костей не является многофункциональной единицей. Это простой рычаг, который прикладывает свои силы при активности в виде ходьбы, бега и прыжков параллельно ее длинной проксимально-дистальной ориентации. Она представляет собой не сжимаемую структуру и не имеет потенциала накопления энергии. С другой стороны, протез стопы изобретения имеет динамические характеристики, поскольку указанные динамические характеристики связаны с горизонтальным и вертикальным линейными компонентами скорости спортивной активности в виде ходьбы, бега и прыжков и функционально превосходят большеберцовую кость и малоберцовую кость человека. Как следствие, существует возможность улучшения выполнения спортивных упражнений людьми, перенесшими ампутацию стопы. Для этого, в соответствии с настоящим изобретением, крепеж 8 ослабляют, и совмещение стержня голени и киля стопы относительно друг друга регулируют в продольном направлении киля стопы. Такое изменение показано в связи с фиг.1 и 2. Затем стержень голени фиксируют к килю стопы в подобранном положении крепежом 8. Во время данной регулировки болт крепежа 8 смещают скольжением относительно одного или обоих из противоположных, относительно более крупных, продольно проходящих отверстий 9 и 10 соответственно в киле стопы и стержне голени.
Изменение совмещения, которое улучшает функциональные характеристики бегуна, который осуществляет первоначальный контакт с грунтом при плоско расположенной стопе, как, например, при спринтерском беге, представляет собой изменение, при котором киль стопы сдвигают вперед относительно стержня голени и стопы, согнутой в подошвенном направлении на стержне голени. Данное новое соотношение улучшает горизонтальный компонент бега. То есть при стержне голени, согнутом в подошвенном направлении к стопе, и стопе, вступающей в контакт с грунтом при плоско расположенной стопе, в отличие от первоначального контакта пятки, грунт немедленно отталкивает назад стопу, которая отталкивает грунт вперед. Это вызывает быстрое движение стержня голени вперед (растяжением) и вниз. Силы динамической характеристики создаются растяжением, которое противодействует направлению первоначального движения стержня голени. Как следствие, стопа поворачивается по оси над областью, несущей нагрузку массы тела на плюсневой подошвенной поверхности. Это вызывает растяжение области среднего отдела киля стопы, сопротивление которому больше, чем сжатию. Чистый эффект растяжения стержня голени и растяжения среднего отдела стопы состоит в том, что осуществляется противодействие дальнейшему переднему продвижению стержня голени, что позволяет мышцам в теле пользователя, разгибающим ногу в коленном суставе, и мышцам, разгибающим ногу в тазобедренном суставе, более эффективным образом сдвигать центр тяжести тела вперед и проксимально (т.е. увеличивать горизонтальную скорость). В данном случае больше вперед и вверх, чем в случае бега с переводом стопы с пятки на пальцы, при котором продвижению стержня голени вперед меньше противодействует стартовое положение стержня голени с большим дорзальным сгибанием (вертикально), чем при беге с плоским положением стопы.
Для анализа функции стопы при спринтерском беге производят изменение совмещения стержня голени и киля стопы. Используют преимущество киля стопы, имеющего все свои вогнутости при ориентации их продольной оси параллельно фронтальной плоскости. Стержень голени согнут в подошвенном направлении и сдвинут назад на киле стопы. Это уменьшает дистальные окружности еще больше, чем при беге с плоским положением стопы при киле стопы многоцелевого использования, подобном килю, изображенному, например, на фиг.3-5 и 8. Как следствие, имеется даже больший потенциал горизонтального движения, и динамическая характеристика направлена на данную улучшенную горизонтальную возможность.
У спринтеров имеется увеличенный диапазон движения, причем первичным движителем является количество движения (инерция) - количество движения. Поскольку фаза замедления их динамической фазы короче, чем их фаза ускорения, достигаются повышенные горизонтальные линейные скорости. Это значит, что при начальном контакте, когда большой палец стопы касается грунта, грунт отталкивает стопу назад, а стопа отталкивает грунт вперед. Стержень голени, который имеет увеличенные силы и количество движения, принуждается к еще большему сгибанию и движению вниз, чем у бегуна с начальным контактом плоской стопой. Как следствие действия указанных сил, вогнутость длинной арки стопы нагружается растяжением, и стержень голени нагружается растяжением. Указанным силам растяжения оказывается сопротивление в большей степени, чем всем другим ранее упомянутым силам, связанным с бегом. Как следствие, динамическая характеристика стопы пропорциональна прилагаемой силе. Реакция стержня голени из большеберцовой и малоберцовой кости человека связана только с энергетическим и силовым потенциалом, так как он представляет собой прямую структуру и не может накапливать энергию. Указанные силы растяжения в протезе стопы изобретения при спринтерском беге больше по величине, чем все другие ранее упомянутые силы, связанные с ходьбой и бегом. Как следствие, динамическая характеристика стопы пропорциональна прилагаемым силам, и возможно увеличение способности спортсмена, перенесшего ампутацию стопы, заниматься спортом, по сравнению с функцией тела человека.
Протез 53 стопы, изображенный на фиг.25, похож на протез стопы, показанный на фиг.3, за исключением регулируемого крепежного устройства между стержнем голени и килем стопы и конструкции верхнего конца стержня голени для соединения с нижним концом пилона. В данном иллюстративном варианте реализации киль 54 стопы соединен с возможностью регулировки со стержнем 55 голени посредством соединительного элемента 56, изготовленного из пластика или металлического сплава. Соединительный элемент прикреплен к килю стопы и стержню голени соответствующими разъединяемыми крепежами 57 и 58, которые расположены с промежутком друг от друга в соединительном элементе в направлении вдоль продольной оси киля стопы. Крепеж 58, соединяющий соединительный элемент со стержнем голени, находится дальше назад, чем крепеж 57, соединяющий киль стопы и соединительный элемент. Путем увеличения, таким образом, активной длины стержня голени увеличиваются динамические характеристики самого стержня голени. Изменения совмещения производят совместно с продольно проходящими отверстиями в стержне голени и киле стопы, как и в других иллюстративных вариантах реализации.
Верхний конец стержня 55 голени изготовлен с удлиненным отверстием 59 для приема пилона 15. После приема в отверстие пилон можно фиксировать к стержню голени затягиванием болтов 60 и 61 для сближения свободных латеральных краев 62 и 63 стержня голени вдоль отверстия. Данное соединение пилона можно легко регулировать ослаблением болтов, выдвиганием пилона относительно стержня голени в желаемое положение и повторной фиксации пилона в отрегулированное положение затягиванием болтов.
Протез стопы 70, показанный на фиг.28-32, аналогичен протезам, изображенным на фиг.3-5, 8, 23, 24 и 25-27, но, кроме того, содержит ограничитель диапазона движения стержня голени и демпферное устройство 71 на стопе для ограничения степени движения верхнего конца стержня голени при силовой нагрузке и разгрузке стержня голени во время использования стопы человеком, перенесшим ампутацию стопы. Данный признак особенно полезен в протезе стопы, имеющем относительно длинный стержень голени, когда пользователю предстоит осуществлять такие виды активности, как бег и прыжки, которые генерируют силы в стержне голени, во много раз превышающие массу тела пользователя, например, в 5-7 раз превышающие массу тела при беге и в 11-13 раз превышающие массу тела при прыжках. Напротив, силы, генерируемые при ходьбе, только в 1-1 1/2 раза превышают массу тела.
Устройство 71 в иллюстративном варианте реализации представляет собой действующий в двух направлениях элемент поршня и цилиндра, в котором сжатые жидкости, газ, такой как воздух, или гидравлическая жидкость предоставлены посредством соответствующих штуцеров 73 и 74. Устройство имеет две вариабельные рукоятки управления, одна для сжатия, одна для растяжения, которые обеспечивают возможность регулировки допустимой степени движения верхнего конца стержня голени и при сжатии, и при растяжении стержня голени при нагрузке и разгрузке силы. Устройство 71 также демпфирует энергию, накапливаемую или высвобождаемую во время сжатия и растяжения стержня голени. Противоположные концы устройства поршня-цилиндра 71 присоединены к верхнему концу стержня голени и к нижней части стопы, и, предпочтительно, в иллюстративном варианте реализации к соответствующим концам стержня голени у шарнирных соединений 75 и 76, которые предпочтительно представляют собой шаровые сочленения.
Движение верхнего конца стержня голени 72 стопы 70 при сжатии и растяжении стержня голени изображено на фиг.32. В целом параболическая форма стержня голени такова, что верхний конец стержня голени может двигаться продольно относительно киля 77 стопы и присоединенного к нему нижнего конца стержня голени, например, по направлению А-А на фиг.5 и 32, причем при воздействии силы, нагружающей и разгружающей его, происходит сжатие и растяжение стержня голени. Таким образом, в иллюстративных вариантах реализации, показанных на фиг.28-32, удерживаются улучшенные динамические характеристики протеза стопы.
Устройство 71 не ограничивается описанным элементом поршня и цилиндра, но может представлять собой другое устройство регулировки скорости и/или ограничения движения. Например, предусмотрено, что демпфирующее устройство 71, ограничивающее задний диапазон движения, используемое на стержне голени протеза стопы, может представлять собой управляемый микропроцессором гидравлический элемент с регулировкой фазы сжатия и растяжения, такой как устройства, используемые в настоящее время для регулирования движения в искусственных коленных суставах. В таком случае предоставляют вмонтированные датчики, которые воспринимают и производят адаптацию к движениям индивидуума. Путем использования специального программного обеспечения и персонального компьютера можно произвести тонкую регулировку для подбора человеку, перенесшему ампутацию стопы, регулируемого микропроцессором гидравлического элемента. Моменты можно измерять до 50 раз/с, обеспечивая динамическую походку, которая, насколько возможно, аналогична естественной ходьбе. Ввиду реактивности гидравлического элемента, он подходит для широкого спектра людей, перенесших ампутацию нижней конечности. Литиевая ионная батарея, помещенная в элемент, обеспечивает достаточную энергию для работы гидравлического элемента в течение полного дня. Сопротивление сжатию регулируется независимо от регулировок растяжения. Множественные интегрированные датчики посылают поток данных анализа походки во вмонтированный микропроцессор, который автоматически регулирует характеристики фаз опоры и качания элемента 50 раз/с.
Указанный регулируемый микропроцессором гидравлический элемент устройства 71 более чувствителен, чем механический гидравлический элемент. Электрически регулируемый клапан сжатия (подошвенного сгибания) проводит регулировку 50 раз/с. Клапан сжатия в элементе автоматически полностью открывается во время фазы, предшествующей качанию. В результате, элемент крайне легко сжать, обеспечивая сгибание на медленных скоростях, в ограниченных областях и в одинаковых условиях. Скорость серводвигателя элемента обеспечивает ему возможность очень быстро закрывать клапан сжатия (подошвенного сгибания) и клапан растяжения (дорзального сгибания) в ответ на команды микропроцессора, посылаемые 50 раз/с. Когда клапаны почти закрыты, демпфирующая сила элемента становится очень высокой, делая возможной быструю ходьбу и даже бег. Уникальный регулируемый протезистом динамический фактор обеспечивает возможность оптимизации гидравлического элемента для всех видов походки от медленной до агрессивной, высоких скоростей ходьбы и движений. Указанная возможность «настраивать» регулируемый микропроцессором гидравлический элемент к необычным типам походки индивидуума обеспечивает возможность получения широкого диапазона ритмов в протезе стопы при высокой эффективности и комфорте ходьбы. То есть использование микропроцессорного гидравлического элемента в виде устройства 71 усиливает изменяемый ритм, требуемый при использовании протеза стопы активными людьми, перенесшими ампутацию стопы.
Продольно проходящий киль 77 стопы протеза стопы 70, показанного на фиг.28-32, имеет передний отдел стопы, средний отдел стопы и задний отдел стопы, подобно килям стопы, показанным на фиг.3 и 25. Стержень 72 голени стопы прикреплен к килю стопы соединительным элементом 78 с двумя разъединяемыми крепежами 79 и 80, расположенными с промежутком в продольном направлении и соединяющими соединительный элемент соответственно со стержнем голени и килем стопы, как в иллюстративном варианте реализации, показанном на фиг.25-27. Стержень 72 голени включает в себя продольно проходящую компенсационную промежуточную прорезь 81 между концами стержня голени. Отверстия компенсационных соединений 82 и 83 расположены на концах компенсационной прорези. Передний отдел стопы и задний отдел стопы киля стопы также изготовлены с соответствующими компенсационными прорезями, как показано на фиг.29, 30 и 31.
Муфта протеза, прикрепленная к культе нижней конечности человека, перенесшего ампутацию, соединена с верхним концом стержня 72 голени посредством адаптера 85, фиксированного к верхнему концу стержня голени крепежами 86 и 87, как показано на чертежах. Адаптер имеет инвертированный имеющий пирамидальную форму узел крепления 88, соединенный с крепежной пластиной, прикрепленной к верхней поверхности адаптера. Пирамидальный узел крепления принимается комплементарно спрофилированным узлом крепления в виде гнезда на зависимой муфте протеза для соединения стопы протеза и муфты протеза. Указанный тип соединения показан в вариантах реализации, показанных на фиг.34-36.
Хотя ограничивающее движение демпфирующее устройство 71 в иллюстративном варианте реализации, показанном на фиг.28-32, ограничивает степень движения верхнего конца стержня голени и при сжатии, и при растяжении стержня голени, можно использовать аналогичное соединение, которое ограничивает степень движения верхнего конца стержня голени только или при сжатии, или при растяжении. Ограничивающее движение демпфирующее устройство 84, которое ограничивает только растяжение верхнего конца стержня голени с принудительной нагрузкой и разгрузкой, показано в иллюстративном варианте реализации, изображенном на фиг.33. Показанное на нем устройство 84 представляет собой гибкую скобу, которая обеспечивает возможность ограниченного, эластического растяжения скобы и, посредством этого, растяжения стержня голени, в то же самое время не ограничивая движение верхнего конца стержня голени при компрессионной нагрузке стержня голени.
Фиг.34-36 иллюстрируют другой стержень 90 голени изобретения, который можно использовать с килем 77 стопы протеза стопы, показанного на фиг.28-32, или с одним из других килей стопы, раскрытых в данном описании. Стержень 90 голени имеет в целом параболическую форму с наименьшим радиусом ее кривизны, расположенным на нижнем конце и проходящий вверх и первоначально вперед в относительно более крупные радиусы на проксимальном терминальном его конце. Обращенная назад вогнутость образована кривизной стержня голени, как показано на фиг.34. Дистальный конец стержня голени имеет продольно проходящее отверстие 91, которое вместе с соединительным элементом 78, разъединяемыми крепежами 79 и 80 и продольно проходящим отверстием в киле стопы обеспечивают возможность регулировки совмещения стержня голени и киля стопы относительно друг друга в продольном направлении, когда крепеж 79 или 80 ослаблен или разъединен для настройки функции протеза стопы для специфического соответствия потребностям.
Дистальный конец стержня 90 голени более остро изогнут, например, имеет меньший радиус кривизны, чем стержень 72 голени, показанный на фиг.28-32, и проходит вверх и вперед на более короткое продольное расстояние. Данная форма стержня голени более косметически благоприятна. То есть его дистальный конец расположен больше в лодыжечной области, где в норме располагались бы медиальная и латеральная лодыжки спрофилированного в форме стопы человека наружного покрытия протеза стопы. Стержень голени лучше укрывается наружным покрытием протеза стопы. Его функциональные характеристики состоят в том, что он быстрее реагирует на реактивные силы, действующие со стороны грунта при первоначальном контакте, хотя с меньшей динамической характеристикой, чем у стержня голени с более широкой параболой, например, более длинными радиусами кривизны, как отмечено выше. Таким образом, те активные люди, которые бегают и прыгают с протезом стопы, получили бы выгоды от использования более широкой параболы или радиуса кривизны, который обеспечивает возможность большей горизонтальной скорости.
Стержень 90 голени, показанный на фиг.34-36, кроме того, включает в себя совмещающее соединительное устройство 92, расположенное в промежутке между пластическим или металлическим адаптером 93, соединенным с верхним концом стержня голени крепежами 94 и 95 и нижним концом втулки протеза 96, фиксированной к культе нижней конечности пользователя. Пользователь может, например, представлять собой человека, перенесшего надколенную или подколенную ампутацию нижней конечности. Совмещающее соединительное устройство содержит пару ползунов 97 и 98, расположенных под прямыми углами друг к другу и в плоскостях, параллельных грунту. Относительное положение компонентов каждого ползуна можно регулировать ослаблением резьбовых крепежей 99 для регулировки соответствующих ползунов 97 и 98 для изменения относительной ориентации муфты протеза к стержню голени и килю стопы протеза стопы. Верхняя часть адаптера 93, поддерживающая устройство 92, предпочтительно параллельна грунту в опорную фазу ходьбы при использовании протеза стопы.
Верхняя часть верхнего ползуна 98 устройства 92 имеет фитинг 101 для соединения с опорной структурой на культе нижней конечности человека и регулируемые скользящие механизмы для регулировки медиального/латерального и переднего/заднего положения стопы относительно фитинга и опорной структуры, с которыми оно соединено.
Таким образом, устройство 92 представляет собой зажим совмещения, который обеспечивает возможность движения муфты протеза во всех направлениях, что влияет на то, как реактивные силы, действующие со стороны грунта, реагируют на механические структуры стержня голени и киля стопы.
Киль 110 стопы, показанный на фиг.37 и 38, и киль 120 стопы, показанный на фиг.39 и 40, представляют собой еще одни иллюстративные варианты реализации килей стопы, которые можно использовать в протезе стопы изобретения. Кили стопы предназначены для правой стопы и имеют одинаковые конструкции, за исключением заднего отдела стопы. Медиальная и латеральная стороны двух килей стопы имеют одинаковую форму. Киль 110 стопы рассечен в сагиттальной плоскости в области заднего отдела стопы идентичными латеральными и медиальными компенсационными распорками 111 и 112, разделенными продольно проходящими компенсационным соединением или прорезью 113. Задняя конечная пяточная область 114 киля 110 стопы параллельна фронтальной плоскости, например, перпендикулярна продольной оси А-А киля стопы. Аналогичным образом, дорзальная вогнутость 115 заднего отдела стопы киля стопы имеет свою продольную ось F-F, параллельную фронтальной плоскости, например, под прямыми углами к продольной оси А-А, т.е. угол Δ равен 90°.
Киль 120 стопы в отличие от киля 110 стопы не рассечен в сагиттальной плоскости в области заднего отдела стопы, но имеет свою дорзальную вогнутость 121 заднего отдела стопы, рассеченную таким образом, что продольная ось F'-F' вогнутости скошена поперек к фронтальной плоскости, например, образует тупой угол Δ' с продольной осью А-А, предпочтительно образующей угол 110°-125° с латеральной стороной дальше впереди, чем с медиальной стороной. Указанная ориентация дорзальной вогнутости делает латеральную компенсационную распорку 122 тоньше по большей длине, чем медиальная компенсационная распорка 123, и посредством этого, эффективно длиннее и гибче, чем распорка 123. Указанное увеличение гибкости предрасполагает задний отдел стопы к реагированию на реактивные силы, действующие со стороны грунта при первоначальном контакте, выворотом, который представляет собой механизм амортизации. Это способствует эффективной передаче сил центра тяжести тела через задний отдел стопы киля стопы при ходьбе для достижения более нормального типа ходьбы.
Это заключает описание иллюстративных вариантов реализации. Хотя настоящее изобретение было описано со ссылкой на ряд иллюстративных вариантов реализации, следует понимать, что специалисты в данной области могут изобрести многочисленные другие модификации и варианты реализации, которые будут охватываться сущностью и диапазоном принципов данного изобретения. Например, нижний конец стержня голени в протезе стопы изобретения не ограничивается формой параболы или в целом формой параболы, но может быть иначе криволинейно сконфигурирован с обращенной вниз выпуклостью для создания желаемых достигаемых в результате движений стопы при соединении с килем стопы для образования области голеностопного сочленения стопы. Признаки различных вариантов реализации можно также использовать друг с другом. Конкретнее, возможны целесообразные изменения и модификации составных частей и/или устройств обсуждаемого комбинированного устройства в пределах диапазона предшествующего описания, чертежей и прилагаемой формулы изобретения без отхода от сущности изобретения. В дополнение к изменениям и модификациям составных частей и/или устройств, для специалистов в данной области будут также очевидны альтернативные виды использования.
Реферат
Изобретение относится к медицинской технике, а именно к высокофункциональному протезу стопы, обеспечивающему улучшенные динамические характеристики в ответ на действие прилагаемой силы. Протез стопы содержит продольно проходящий киль стопы, имеющий передний отдел стопы, средний отдел стопы и задний отдел стопы, упругий, вертикально стоящий стержень голени, имеющий нижний конец, соединенный с килем стопы и проходящий от него вверх для образования области голеностопного сочленения протеза стопы, и нижнюю протезную часть нижней конечности для соединения на ее верхнем конце с опорной структурой на культе нижней конечности человека и устройство для ограничения степени движения верхнего конца стержня голени. Верхний конец выполнен с возможностью движения в продольном направлении киля стопы в ответ на действие силы, нагружающей и разгружающей стержень голени во время использования протеза стопы. В другом варианте стержень голени протеза стопы включает в себя продольно проходящую компенсационную прорезь в промежутке между концами стержня голени. В третьем варианте протез стопы содержит совмещающее соединительное устройство, соединенное с верхним концом стержня голени. Устройство имеет фитинг для соединения с опорной структурой на культе нижней конечности человека и регулируемые скользящие механизмы для регулировки медиального/латерального и переднего/заднего положения стопы относительно фитинга и опорной структуры, с которыми оно соединено. В четвертом варианте выпукло изогнутый вниз нижний конец стержня голени в целом спрофилирован в форме параболы с наименьшим радиусом его кривизны, расположенным на нижнем конце и проходящим от него. В пятом варианте задний отдел стопы киля стопы имеет дорзальную вогнутость с продольной осью, скошенной относительно фронтальной плоскости так, что латеральная сторона вогнутости находится дальше вперед, чем медиальная сторона. Технический результат - улучшенная прикладная механика, динамическая характеристика от высокого до низкого уровня и возможность регулировки совмещения, которую можно тонко настраивать для улучшения горизонтального и вертикального компонентов функционирования, которые по природе могут быть специфичными в зависимости от конкретных потребностей. 9 н. и 42 з.п. ф-лы, 40 ил.

Комментарии