Составной угловой имплантат - RU2637626C2
Код документа: RU2637626C2
Чертежи


























Описание
ПЕРЕКРЕСТНЫЕ ССЫЛКИ НА РОДСТВЕННЫЕ ЗАЯВКИ
Настоящая заявка претендует на приоритет и получение всех преимуществ согласно предварительной заявке на патент США, порядковый номер 61/453328, поданной 16 марта 2011 г. и озаглавленной "Compound Angle Guide" (Направляющая для установки под различными углами), и предварительной заявке на патент США, порядковый номер 61/475357, поданной 14 апреля 2011 г. и озаглавленной "Compound Angle Implant" (Имплантат для установки под различными углами), а также предварительной заявке на патент США, порядковый номер 61/491962, поданной 1 июня 2011 г. и озаглавленной "Compound Angle Implant" (Имплантат для установки под различными углами), все содержание которых полностью включено сюда путем ссылки.
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение имеет отношение к имплантату для установки под различными углами.
УРОВЕНЬ ТЕХНИКИ
При проведении операции по протезированию сустава имплантат вставляется внутрь или крепится к кости, подготовленной к приему данного имплантата. Для моделирования природной анатомии при проведении операции по протезированию сустава известно обеспечение хирурга модульными, регулируемыми компонентами имплантата. Модульные, регулируемые компоненты имплантата позволяют хирургу выполнять его подгонку к большому диапазону имеющихся у пациентов суставных и костных конфигураций без, например, необходимости в наличии большого перечня имплантируемых структур различной конфигурации.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
При проведении операции по протезированию сустава, например, плечевого, желательно предоставлять хирургу возможность располагать стержень имплантата в плечевой кости безотносительно к ориентации плечевой остеотомии. После установки стержня в плечевую кость хирург выбирает компонент имплантата, соединяющийся со стержнем и выполненный так, чтобы анатомически ориентировать имплантат плечевой головки. Наклон-изгиб назад направляющей помогает хирургу в выборе компонента имплантата и предоставляет ему возможность выбора измерения наклона и/или изгиба назад.
Согласно одному аспекту настоящего изобретения способ точной установки первого и второго компонентов имплантата включает размещение первого компонента имплантата в кость, после чего выполняется: соединение первого промежуточного элемента с первым компонентом имплантата; соединение первого установочного элемента с первым промежуточным элементом; поворот первого установочного элемента и первого промежуточного элемента как одного узла для размещения первого промежуточного элемента в регулируемое положение; крепление первого промежуточного элемента к первому компоненту имплантата с первым промежуточным элементом в регулируемое положении; удаление первого установочного элемента из первого промежуточного элемента; и соединение второго промежуточного элемента с первым промежуточным элементом, и поворот второго промежуточного элемента относительно первого промежуточного элемента для обеспечения требуемой ориентации второго промежуточного элемента.
Варианты воплощения данного аспекта изобретения могут включать одну или более из следующих особенностей. Первый установочный элемент соединяется с первым промежуточным элементом без поворотной регулировки первого установочного элемента относительно первого промежуточного элемента. Первый промежуточный элемент включает шкалу. Первый установочный элемент включает множество шкал. Настоящий способ включает крепление второго промежуточного элемента к первому промежуточному элементу при требуемой ориентации второго промежуточного элемента. Настоящий способ включает соединение второго установочного элемента со вторым промежуточным элементом для поворота второго промежуточного элемента. Второй установочный элемент соединяется со вторым промежуточным элементом без поворотной регулировки второго установочного элемента и второго промежуточного элемента. Второй промежуточный элемент имеет требуемую ориентацию тогда, когда второй установочный элемент располагается параллельно костной остеотомии. Первый промежуточный элемент находится в регулируемом положении тогда, когда первый установочный элемент располагается параллельно костной остеотомии. Настоящий способ включает соединение второго элемента со вторым компонентом имплантата.
Согласно другому аспекту настоящего изобретения система точной установки для совмещения первого и второго элементов соединителя имплантата включает первый установочный элемент, имеющий наружную поверхность для захвата пользователем и канал с размерами, обеспечивающими прием первого элемента; канал проходит неперпендикулярно через первый установочный элемент; и второй установочный элемент, имеющий наружную поверхность для захвата пользователем и канал с размерами, обеспечивающими прием второго элемента.
Варианты воплощения данного аспекта изобретения могут включать канал второго установочного элемента, поперечно проходящий через второй установочный элемент.
Согласно другому аспекту настоящего изобретения способ точной установки первого и второго компонентов имплантата включает: соединение первого промежуточного элемента с первым компонентом имплантата; соединение установочного элемента с первым промежуточным элементом при выставленных шкалах на установочном элементе и на первом промежуточном элементе; поворот установочного элемента и первого промежуточного элемента как одного узла в регулируемое положение путем совмещения шкалы на установочном элементе со шкалой на кости, в котором первый компонент имплантата правильно установлен; крепление первого промежуточного элемента к первому компоненту имплантата с первым промежуточным элементом в регулируемом положении; удаление установочного элемента из первого промежуточного элемента и соединение второго промежуточного элемента с первым промежуточным элементом, и поворот второго промежуточного элемента относительно первого промежуточного элемента для обеспечения требуемой ориентации второго промежуточного элемента.
Варианты воплощения данного аспекта изобретения могут включать одну или более из следующих особенностей. Настоящий способ включает крепление второго промежуточного элемента к первому промежуточному элементу при требуемой ориентации второго промежуточного элемента. Настоящий способ включает соединение установочного элемента со вторым промежуточным элементом для поворота второго промежуточного элемента. Второй промежуточный элемент имеет требуемую ориентацию тогда, когда установочный элемент располагается параллельно костной остеотомии. Шкала на установочном элементе для совмещения с первым промежуточным элементом отличается от шкалы на установочном элементе для совмещения с костной шкалой. Настоящий способ включает соединение второго промежуточного элемента со вторым компонентом имплантата.
Согласно другому аспекту настоящего изобретения система точной установки для совмещения первого и второго элементов соединителя имплантата включает установочный элемент, имеющий наружную поверхность для захвата пользователем и первый и второй коаксиальные каналы. Первый канал имеет размеры, обеспечивающие прием первого элемента, а второй канал имеет размеры, обеспечивающие прием второго элемента. Первый канал имеет волнообразный периметр. Установочный элемент включает видимую пользователю шкалу для совмещения первого элемента с костной остеотомией.
Варианты воплощения данного аспекта изобретения могут включать одну или более из следующих особенностей. Система точной установки включает импакторный инструмент, имеющий волнообразный внешний периметр, соответствующий волнообразному периметру первого канала для обеспечения приема внутри первого канала, чтобы обеспечивать контакт со вторым элементом, когда данный второй элемент находится внутри второго канала.
Согласно другому аспекту настоящего изобретения анатомическая направляющая включает первый элемент, а также второй элемент, соединяющийся с первым элементом таким образом, что второй элемент может сдвигаться и наклоняться относительно первого элемента. Второй элемент включает поверхность для контактирования с костной остеотомией таким образом, чтобы при находящейся в контакте с костной остеотомией поверхности относительный сдвиг и наклон второго элемента относительно первого элемента идентифицировал анатомический имплантат для использования с остеотомией.
Варианты воплощения данного аспекта изобретения могут включать одну или более из следующих особенностей. Направляющая включает индикаторы, идентифицирующие анатомический имплантат. Первый элемент является штоком. Второй элемент соединяется со штоком для обеспечения возможности сдвига вдоль штока и наклона относительно штока. Второй элемент является рабочим шаблоном, имеющим первую и вторую части, причем первая часть может наклоняться относительно второй части и первого элемента.
Индикаторы включают шкалу, показывающую относительный наклон первой части. Индикаторы включают шкалу, показывающую относительный сдвиг второго элемента. Индикаторы включают образование на втором элементе для использования с целью указания на остеотомии поворотной точной установки направляющей относительно остеотомии.
Индикаторы включают: шкалу, показывающую относительный наклон второго элемента; шкалу, показывающую относительный сдвиг второго элемента; и образование на втором элементе для использования с целью указания на остеотомии поворотной точной установки направляющей относительно остеотомии.
Второй элемент соединяется с первым элементом для обеспечения наклона в более чем одной плоскости. Второй элемент соединяется с первым элементом для обеспечения поворота относительно первого элемента.
Согласно другому аспекту настоящего изобретения способ выбора компонента имплантата включает:
соединение направляющей с имплантатом, причем направляющая имеет первый элемент и второй элемент; сдвиг второго элемента относительно первого элемента по направлению к костной остеотомии; поворот по меньшей мере части направляющей относительно имплантата; наклон второго элемента относительно первого элемента для ориентирования направляющей относительно остеотомии; и использование ориентирования направляющей для способствования выбору компонента имплантата.
Согласно другому аспекту настоящего изобретения способ точной установки первого и второго компонентов имплантата включает: совмещение шкал на первом и втором промежуточных элементах путем относительного поворота по меньшей мере одного из промежуточных элементов; соединение первого и второго промежуточных элементов; соединение первого элемента с первым компонентом имплантата; и соединение второго элемента со вторым компонентом имплантата.
Варианты воплощения данного аспекта настоящего изобретения могут включать одну или более из следующих особенностей. Первый и второй промежуточные элементы совмещаются перед соединением. Первый элемент соединяется с первым имплантатом перед совмещением шкал. Первый и второй элементы совмещаются и соединяются перед тем, как эти элементы соединяются с компонентами имплантата. Шкалы на первом и втором элементах совмещаются со шкалой на кости, которая принимает один из компонентов имплантата. Второй элемент соединяется со вторым имплантатом после совмещения шкал. Первый компонент имплантата является плечевым стержнем. Второй компонент имплантата является плечевой головкой.
Согласно другому аспекту настоящего изобретения способ точной установки первого и второго компонентов имплантата включает: установку первого компонента имплантата в кость; маркировку шкалы на кости; соединение первого промежуточного элемента с первым компонентом имплантата при совмещенной шкале на первом промежуточном элементе со шкалой на кости; соединение второго промежуточного элемента с первым промежуточным элементом при совмещенной шкале на втором промежуточном элементе со шкалой на первом промежуточном элементе; и соединение второго промежуточного элемента со вторым компонентом имплантата.
Варианты воплощения данного аспекта изобретения могут включать одну или более из следующих особенностей. Первый промежуточный элемент соединяется с первым компонентом имплантата перед соединением второго промежуточного элемента с первым промежуточным элементом. В качестве альтернативы второй промежуточный элемент соединяется с первым промежуточным элементом перед соединением первого промежуточного элемента с первым компонентом имплантата.
Согласно другому аспекту настоящего изобретения соединитель для присоединения первого и второго компонентов имплантата включает первый элемент, второй элемент и связующее звено. Первый элемент сконфигурирован для соединения с первым компонентом имплантата. Связующее звено сконфигурировано для соединения первого элемента с первым компонентом имплантата. Первый элемент имеет наружный конус, смещенный по углу установки относительно оси вращения первого элемента. Второй элемент имеет внутренний конус для приема наружного конуса. Внутренний конус согласуется с наружным конусом таким образом, что ось вращения второго элемента не находится на одной линии с осью вращения первого элемента. Второй элемент имеет наружный конус, смещенный по углу установки относительно оси вращения второго элемента. Наружный конус второго элемента сконфигурирован для соединения второго элемента со вторым компонентом имплантата таким образом, что ось вращения второго компонента имплантата не находится на одной линии с осью вращения второго элемента.
Варианты воплощения данного аспекта настоящего изобретения могут включать одну или более из следующих особенностей. Смещение первого элемента составляет угол A, а смещение второго элемента составляет угол В, так, что относительный поворот первого и второго элементов образует угол смещения величиной до A+B. Первый элемент выполняется с возможностью поворота относительно первого компонента имплантата при их соединении.
Подробности одного или более вариантов воплощения настоящего изобретения изложены ниже вместе с сопроводительными чертежами и описанием. Другие особенности, цели и преимущества настоящего изобретения станут очевидными из представленного описания, чертежей и формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
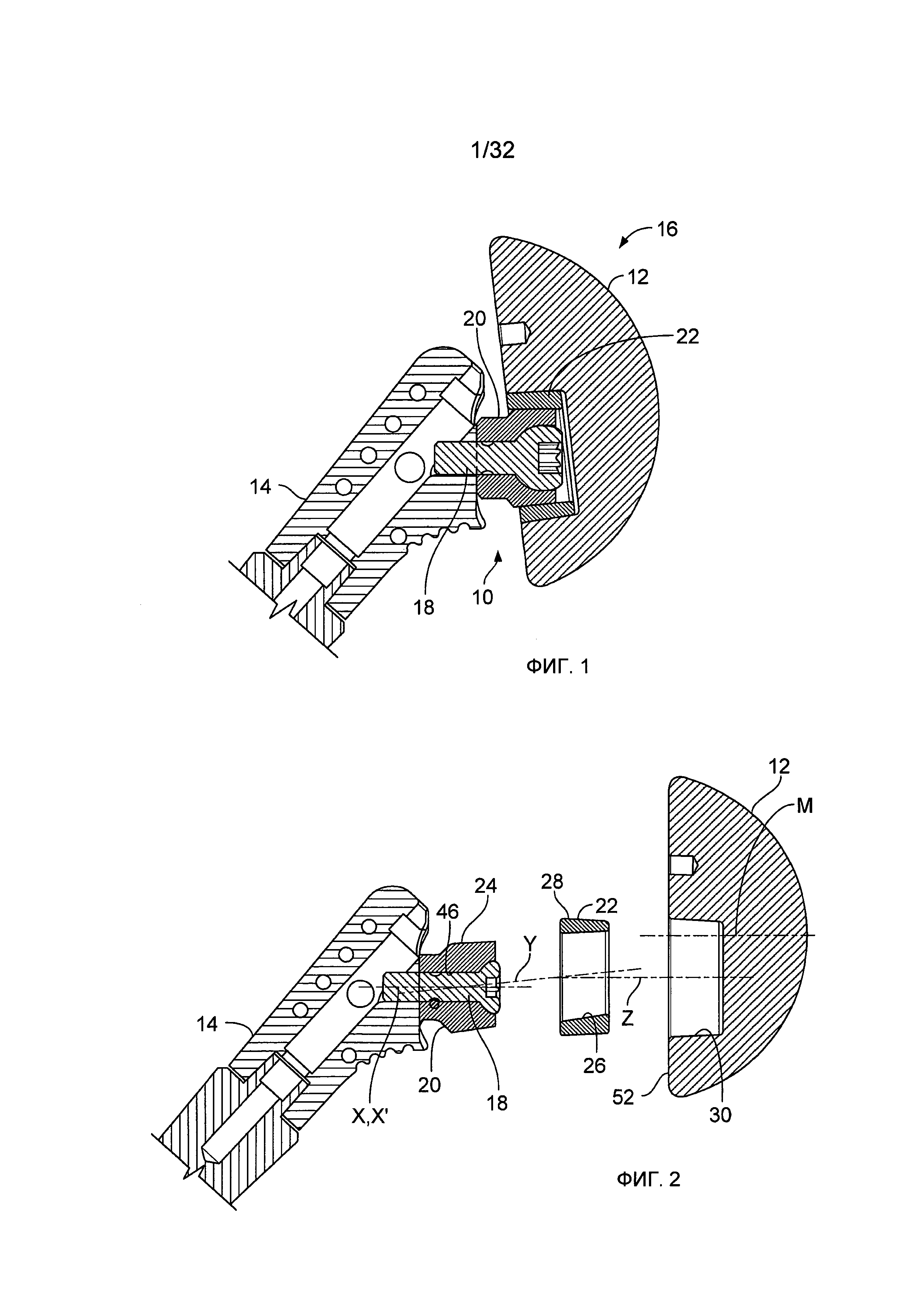
На Фиг.1 представлено поперечное сечение вида сбоку соединителя, соединяющего два имплантата.
На Фиг.2 и 3 представлены изображения в разобранном виде соединителя и имплантатов.
На Фиг.4A-4C представлены поперечные сечения вида сбоку соединителя.
На Фиг.5A и 5B показана ориентация стержня в плечевой кости.
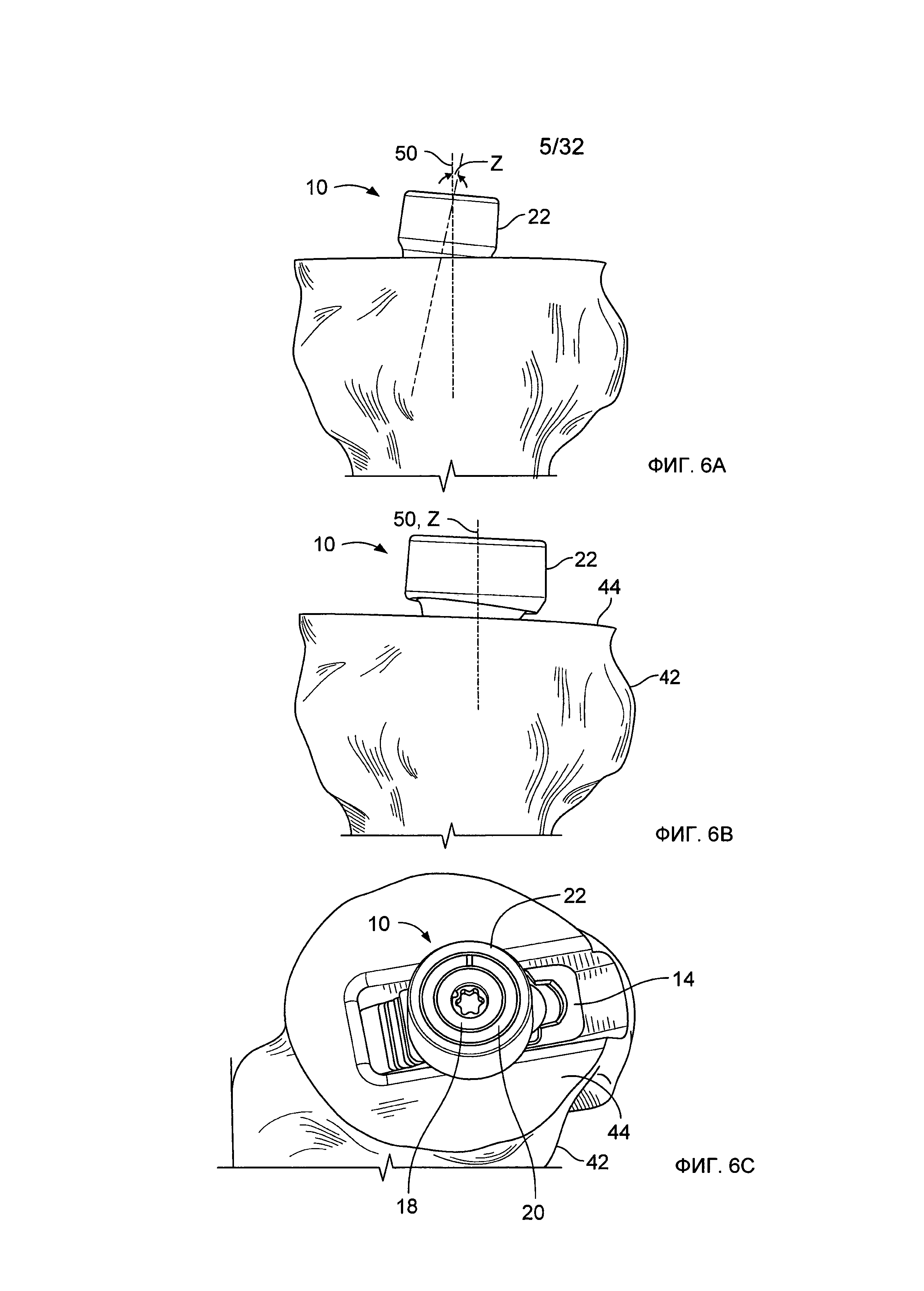
На Фиг.6A-6C показан соединитель, соединенный с находящимся в кости имплантатом.
На Фиг.7A и 7B представлены виды в перспективе элемента соединителя.
На Фиг.8A и 8B представлены виды сверху и сбоку установочного элемента для первого элемента соединителя.
На Фиг.8C и 8D представлены виды сверху и сбоку установочного элемента для второго элемента соединителя.
На Фиг.9A-9E показан пример способа использования установочных элементов по Фиг.8.
На Фиг.10A и 10B представлены виды сверху и сбоку альтернативного варианта воплощения установочного элемента для первого элемента соединителя.
На Фиг.10C представлен вид сверху установочного элемента по Фиг.10A с альтернативной шкалой.
На Фиг.11A-11D показан пример способа использования установочных элементов по Фиг.8 и 10.
На Фиг.12A-13B показаны различные способы использования установочных элементов по Фиг.8 и 10.
На Фиг.14A представлен вид сбоку анатомической направляющей, соединенной с находящимся в кости стержнем.
На Фиг.14B представлен вид в перспективе по Фиг.14A.
На Фиг.15 представлен вид в перспективе альтернативной реализации анатомической направляющей по Фиг.14.
На Фиг.16A представлен вид сбоку анатомической направляющей по Фиг.15.
На Фиг.16B представлено поперечное сечение анатомической направляющей вдоль линий 16B-16B на Фиг.16A.
На Фиг.16C представлен вид поперечного сечения анатомической направляющей вдоль линий 16C-16C на Фиг.16A.
На Фиг.16D представлен вид поперечного сечения анатомической направляющей вдоль линий 16D-16D на Фиг.16A.
На Фиг.16E представлен вид сбоку штока анатомической направляющей по Фиг.15.
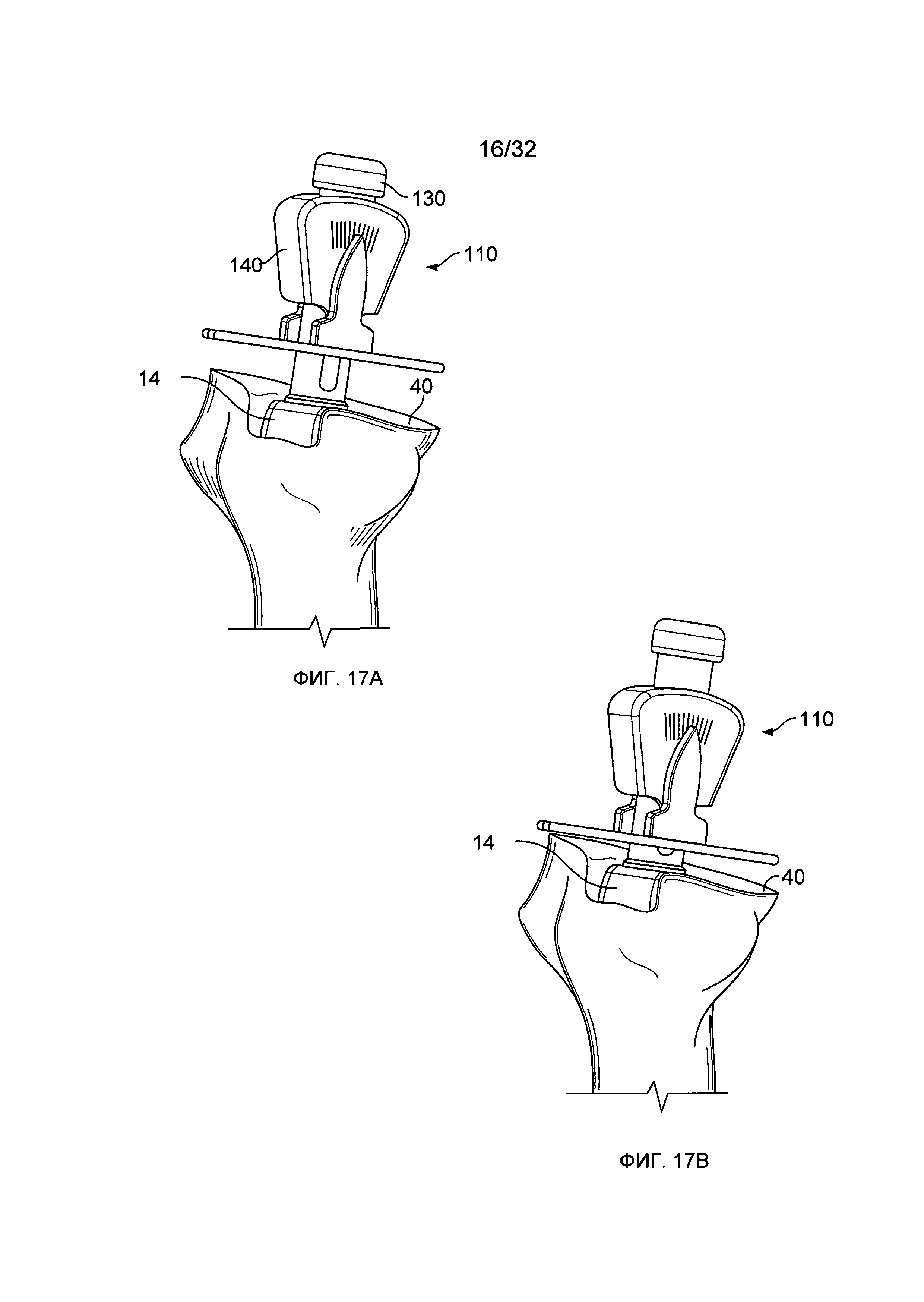
На Фиг.17A и 17B показано направляющую по Фиг.14 в использовании.
На Фиг.18A-18E показано использование направляющей по Фиг.15 для определения параметров соединителя.
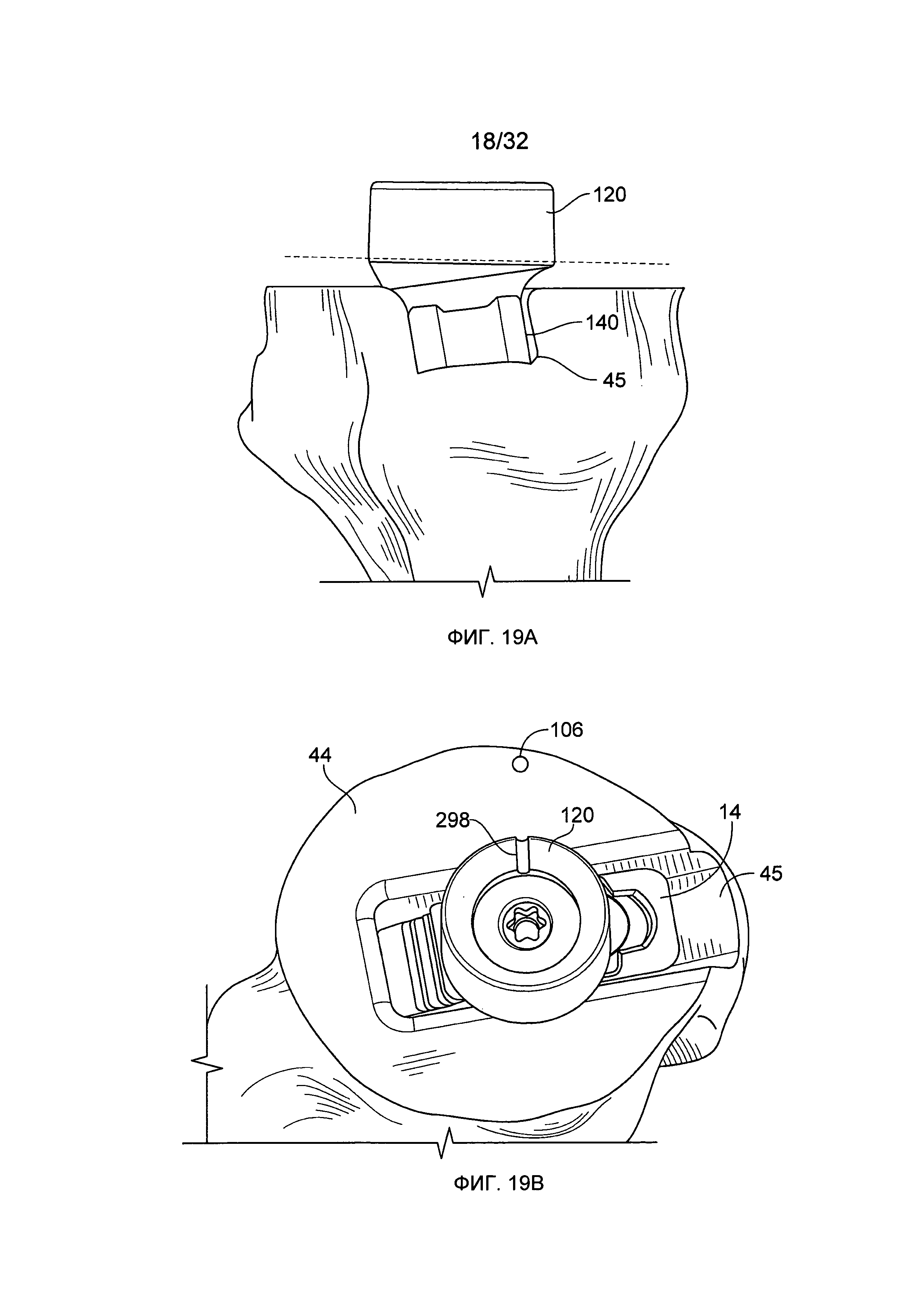
На Фиг.19A и 19B показан выбранный компонент имплантата.
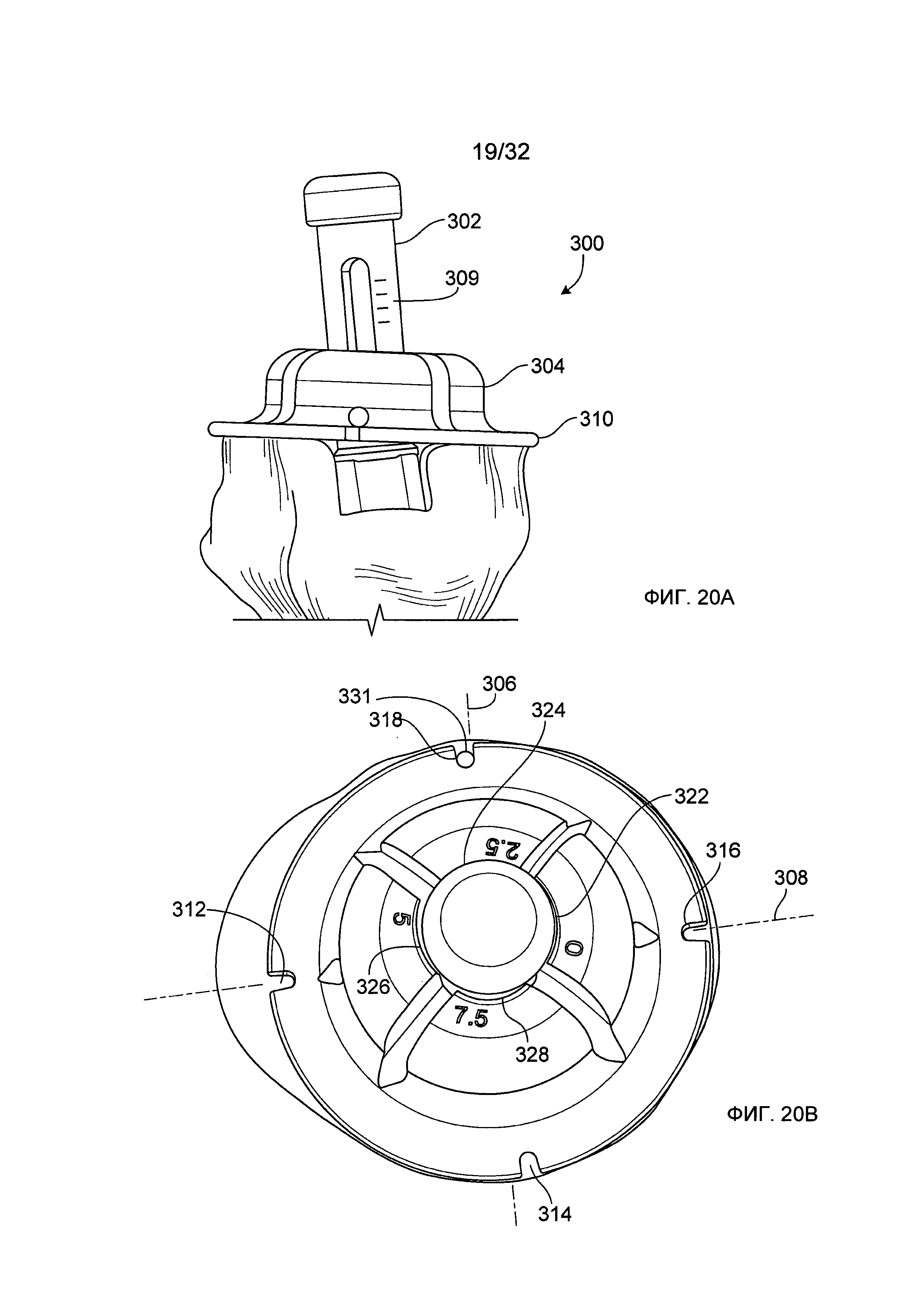
На Фиг.20A-20C показана другая альтернативная реализация анатомической направляющей.
На Фиг.21 показана другая альтернативная реализация анатомической направляющей.
На Фиг.22A-23B показана другая альтернативная реализация анатомической направляющей.
На Фиг.24A и 24B представлены виды сбоку и поперечного сечения альтернативной реализации установочного элемента для использования с соединителем.
На Фиг.25A-25G показано использование пробного соединителя и установочного элемента по Фиг.24.
На Фиг.26A показано использование импактора.
На Фиг.26B и 26C представлены виды сбоку и поперечного сечения импактора.
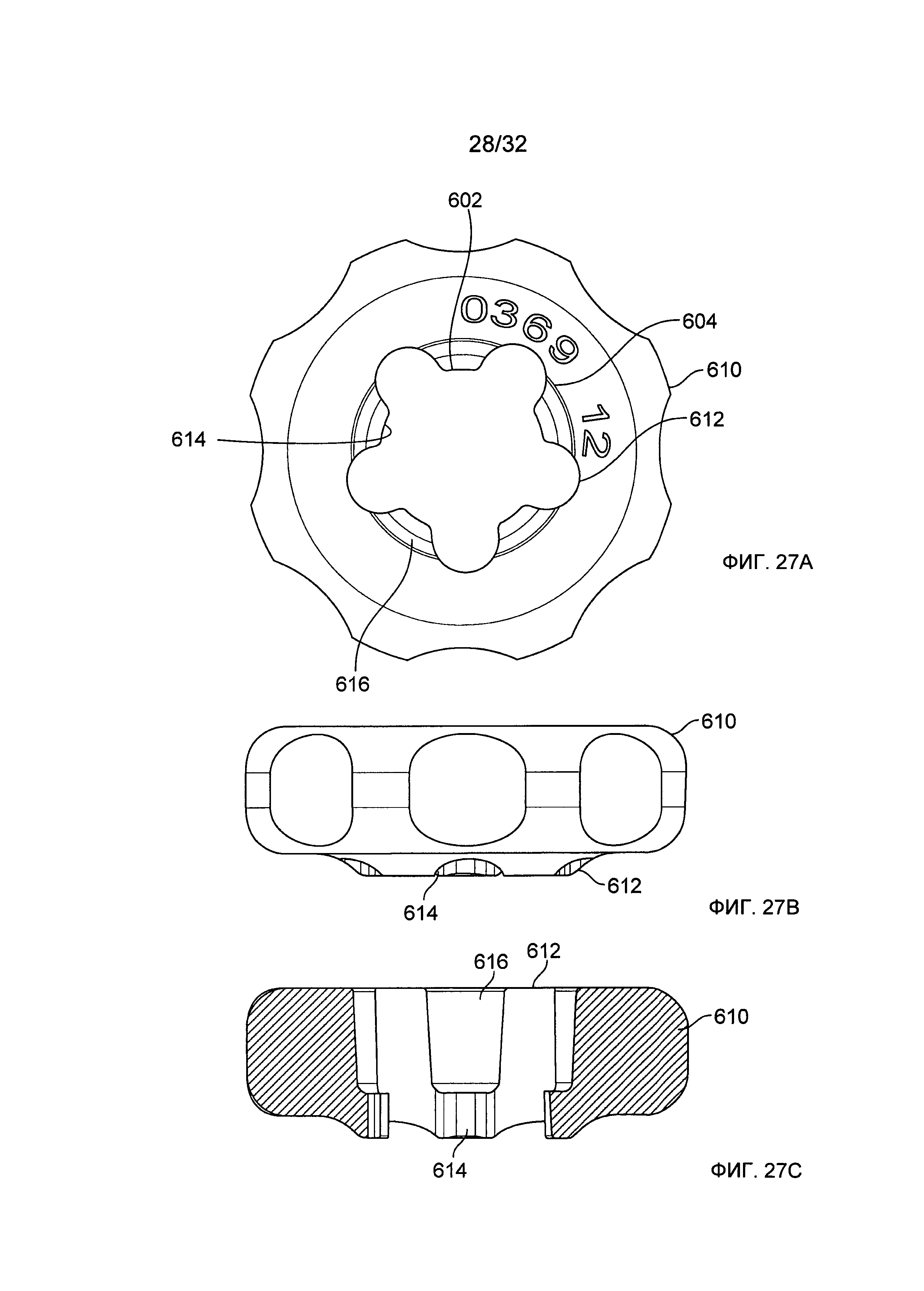
На Фиг.27A-27C представлены виды сверху, сбоку и поперечного сечения другой альтернативной реализации установочного элемента.
На Фиг.27D показано использование альтернативной реализации импактора.
На Фиг.28 представлен вид сверху другой альтернативной реализации установочного элемента.
На Фиг.29A-29C показан состоящий из трех частей установочный элемент.
На Фиг.30 показано другое использование пробного соединителя.
На Фиг.31A-31B показана регулировка соединителя.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Как указано на Фиг.1, соединитель 10 позволяет выполнять интраоперационную регулировку наклона и/или изгиба назад второго компонента имплантата относительно первого компонента имплантата, например, регулировку имплантата плечевой головки 12 относительно стержня 14 протеза 16 во время выполнения плечевой артропластики. Регулировка может выполняться с использованием неограниченного количества шагов при максимальном угле установки, например, около +/-20°, причем в приведенном для иллюстрации варианте воплощения настоящего изобретения демонстрируется максимальный угол установки +/-12°. Соединитель 10 включает первый промежуточный элемент 20, который хирург прикрепляет к стержню 14 с помощью связующего звена, например, такого крепежного элемента как винт 18 или конус, или защелочное связующее звено, и второй промежуточный элемент 22, который хирург прикрепляет к имплантату головки 12 посредством, например, конусной посадки под давлением.
Стержень 14 может прикрепляться к кости путем дистальной фиксации, а соединитель 10 может соединяться со стержнем 14 после того как стержень 14 закрепляется в кости. Стержень 14 может быть модульным, имеющим проксимальные (внутренние) части различной длины, которые может выбирать хирург, причем данная проксимальная часть может поворачиваться относительно дистальной (наружной) части стержня до момента своего закрепления в определенном положении относительно соответствующей дистальной части.
Перед выполнением крепления к стержню 14 первый элемент 20 может соединяться со стержнем 14 винтом 18 или другим связующим звеном так, чтобы иметь возможность поворачиваться относительно стержня 14. Как указано на Фиг.2 и 3, первый элемент 20 имеет наружный конус 24, смещенный по углу установки относительно оси вращения X первого элемента. Второй элемент 22 имеет внутренний конус 26 для приема наружного конуса 24. Внутренний конус 26 согласуется с наружным конусом 24 таким образом, что ось вращения Y второго элемента 22 не находится на одной линии с осью вращения X первого элемента 20. Второй элемент 22 также имеет наружный конус 28, смещенный по углу установки относительно оси вращения Y второго элемента 22. Наружный конус 28 второго элемента 22 принимается внутренним конусом 30 в имплантате головки 12 с целью соединения второго элемента 22 с имплантатом головки 12 таким образом, что ось вращения Z имплантата головки 12 не находится на одной линии с осью вращения Y второго элемента 22.
Относительное поворотное положение первого и второго элементов 20, 22 определяет окончательное угловое смещение между осями X и Z. Например, на Фиг.2 первый и второй элементы 20, 22 позиционируются с конусами 24 и 28, нейтрализующими друг друга таким образом, что оси X и Z располагаются параллельно. На Фиг.3 первый и второй элементы 20, 22 позиционируются с конусами 24 и 28, обеспечивающими сложение углов, и оси X и Z имеют максимальное угловое смещение. В приведенном для иллюстрации варианте воплощения настоящего изобретения оси X и Y смещены на угол A, например, 6°, и оси Y и Z также смешены на угол B, например, 6°, таким образом, что максимальное угловое смещение A+B равно 12°. На Фиг.3 показана установка под углом +12°. Установка под углом -12° может быть выполнена путем поворота как первого, так и второго элементов 20, 22 на 180°. На Фиг.4A-4C показаны угловые смещения 0°, 6° и 12° первого и второго элементов 20, 22. Вместо расположения положительных и отрицательных углов в плоскости наклона, как это показано, положительные/отрицательные углы могут быть предшествующими/последующими (в плоскости вариантов).
Ось вращения Z внутреннего конуса 30 в имплантате головки 12 смещена относительно оси симметрии M имплантата головки 12 таким образом, что поворот имплантата головки 12 относительно второго элемента 20 вокруг оси вращения Z обеспечивает получение еще одной степени свободы при регулировке относительного положения стержня и головки.
Согласно Фиг.5A и 5B, во время выполнения процедуры плечевой артропластики хирург обычно выполняет остеотомию 40 в плечевой кости 42 для формирования плоской поверхности кости 44 и просверливает канал 45 в кости 42 для приема стержня 14. Стержень 14 имеет связующую ось X' (Фиг.2), определяемую, например, резьбовым отверстием 46, которое принимает винт 18, и которая совпадает с осью вращения X первого элемента 20 тогда, когда первый элемент 20 соединен со стержнем 14. Однако, ось X' может не быть параллельной нормальному вектору 50 к поверхности кости 44. Как показано на Фиг.6A и 6B, хирург может интраоперативно регулировать положение имплантата головки 12 относительно поверхности кости 44, например, для того, чтобы сделать поверхность 52 (Фиг.2) имплантата головки 12 параллельной к поверхности кости 44 (и, таким образом, чтобы ось Z была параллельна вектору 50), путем регулировки относительного поворотного положения элементов 20, 22 в направлении от смещенного положения по Фиг.6A к параллельному положению по Фиг.6B. Соединитель 10, соединенный со стержнем 14, можно видеть на Фиг.6C.
Расстояние между поверхностями 44 и 52 определяется длиной элементов 20, 22. Хирург может установить расстояние, например, путем выбора среди элементов 20, имеющих диапазон длин L (Фиг.7A и 7B). Как показано на Фиг.7A и 7B, элемент 20 имеет контактирующую со стержнем поверхность 54 с круговыми выступами 56, зацепляющимися с соответствующими выступами на стержне 14 для облегчения точной поворотной установки элемента 20 и стержня 14.
Согласно Фиг.3 и 7B, элемент 20 задает штифтовые отверстия 20a, которые принимают штифты 20b, способствующие удержанию винта 18 внутри элемента 20. Элемент 20, штифт 20b и винт 18 могут предоставляться хирургу в виде предварительно соединенной сборки. Ссылаясь на Фиг.4B, в приведенном для иллюстрации варианте воплощения элемента 22 поверхность 22а элемента 22 перпендикулярна внутреннему конусу 26, а поверхность 22b элемента 22 перпендикулярна наружному конусу 28.
Как обсуждалось выше, хирург может сделать поверхность 52 имплантата головки 12 параллельной к поверхности кости 44 путем регулировки относительного поворотного положения элементов 20, 22 соединителя 10. Например, со ссылкой на Фиг.8A-8D, первый установочный элемент 60 задает отверстие 62, предназначенное для приема первого элемента 20 путем фрикционного зацепления, а второй установочный элемент 64 задает отверстие 66, предназначенное для приема второго элемента 22 путем фрикционного зацепления. Отверстия 62, 66 поперечно проходят через соответствующие установочные элементы 60, 64. Установочные элементы 60, 64 относительно тонкие, например, они имеют толщину T примерно 6 мм или меньше, предпочтительно - около 3,5-4,5 мм, и прозрачные, изготовленные, например, из полиэфиримида, для облегчения регулировки первого и второго элементов 20, 22, как обсуждается ниже.
Установочные элементы 60, 64 могут использоваться для присоединения первого и второго элементов 20, 22 к стержню 14 без необходимости в дополнительных угловых направляющих или метках на кости, как будет дополнительно рассмотрено ниже. Ссылаясь на Фиг.9A-9E, пример способа использования установочных элементов 60, 64 включает выполнение резекции кости плечевой головки и имплантацию стержня 14 в проделанную полость в кости с использованием дистальной фиксации (Фиг.9A). Затем хирург располагает установочный элемент 64 возле заранее собранного пробного соединителя, имеющего присоединенные первый и второй пробные элементы 66. Присоединенные первый и второй пробные элементы 66 могут наклоняться относительно друг друга, но поворачиваться как один узел. Хирург привинчивает установочный элемент 64/пробные элементы 66 сборки к стержню 14, и поворачивает установочный элемент 64 и заранее собранный пробный соединитель как один узел вокруг оси винта до тех пор, пока пользователь не воспримет зрительно и по ощущениям, что установочный элемент 64 располагается параллельно передней части остеотомии (Фиг.9B). После этого пользователь затягивает винт 18. Пробная фаза процедуры завершается присоединением пробной плечевой головки 12 (Фиг.9C) и проверкой пробного имплантата для определения соответствия длины соединителя. В пробной фазе определяется требуемая длина первого элемента 20 и то, может ли быть скорректирован угол остеотомии в диапазоне, обеспечиваемом первым и вторым элементами 20, 22.
Затем хирург выбирает первый элемент 20 в соответствии с длиной пробного соединителя и частично прикрепляет винтом первый элемент 20 к стержню 14 с использованием инструмента 68. Хирург использует установочный элемент 60, под давлением устанавливаемый на первый элемент 20, для поворачивания первого элемента 20 до тех пор, пока хирург не заметит, что установочный элемент 60 располагается параллельно передней части остеотомии (Фиг.9D) при взгляде через установочный элемент 60 или путем оценки параллельности при боковом просмотре. Установочный элемент 60 под давлением устанавливается на первый элемент 20 без необходимости выполнения поворотной регулировки установочного элемента 60 и первого элемента 20. После этого хирург затягивает винт для крепления первого элемента 20 к стержню и удаляет установочный элемент 60. Затем хирург под давлением устанавливает установочный элемент 64 на второй элемент 22, располагает второй элемент 22 над первым элементом 20 и использует установочный элемент 64 для поворачивания второго элемента 22 относительно первого элемента 20 до тех пор, пока хирург не заметит, что установочный элемент 64 располагается параллельно передней части остеотомии (Фиг.9Е) при взгляде через установочный элемент 64. Установочный элемент 64 под давлением устанавливается на второй элемент 22 без необходимости поворотной регулировки установочного элемента 64 и второго элемента 22. Если приведенные выше шаги не обеспечивают получение требуемого результата, хирург может ослабить винт, повернуть первый элемент 20 на 90 градусов, например, относительно метки 70 на первом элементе 20, затянуть винт и тогда перенастроить второй элемент 22 с использованием установочного элемента 64.
Согласно Фиг.10A и 10B, установочный элемент 72 задает отверстие 74, предназначенное для приема первого элемента 20 путем фрикционного зацепления. Отверстие 74 вместо поперечного прохождения через установочный элемент, как в описанных выше вариантах воплощения настоящего изобретения, отклоняется на угол 6 в диапазоне, например, от четырех до шести градусов, по указанным ниже причинам. Установочный элемент 72 включает область 76, утолщенную для облегчения изготовления, и также может включать множество шкал 78 на верхней поверхности 80. В качестве альтернативы верхняя поверхность 80 может содержать шкалу 82, как показано на Фиг.10C, шкалу 82, соответствующую, например, полному угловому диапазону соединителя 10.
Вместо использования установочного элемента 60 с первым элементом 20 может использоваться установочный элемент 72, имеющий смещенное отверстие. Без применения смещенного отверстия, как в случае использования установочного элемента 60, возможно, что из-за смещения на шесть градусов второго элемента 22 после настройки первого элемента 20 установочный элемент 64 со вторым элементом 22 нельзя будет установить параллельно передней части остеотомии. Однако, если отверстие смещено, например, на 4 градуса, любая ошибка распределяется, увеличивая вероятность параллельной установки. Для сведения к минимуму любых ошибок хирург может использовать установочный элемент 72 со смещением в шесть градусов, имитирующий второй элемент 22, и шкалу 82.
Согласно Фиг.11A-11D, пример способа использования установочных элементов 72, 64 включает выполнение резекции кости плечевой головки и имплантацию стержня 14 в проделанную полость в кости с использованием дистальной фиксации (Фиг.11A). Хирург затем выбирает первый элемент 20, имеющий соответствующую длину, например, определенную в соответствии с длиной пробного соединителя, и частично прикрепляет винтом первый элемент 20 к стержню 14 (Фиг.11B). Первый элемент 20 имеет одну шкалу 70, которую хирург совмещает с одной из шкал 78, 82 установочного элемента 72 при размещении установочного элемента 72 на первом элементе 20 (Фиг.11C). После такого совмещения хирург поворачивает установочный элемент 72 с первым элементом 20, чтобы убедиться в том, что установочный элемент 72 можно установить параллельно передней части остеотомии. Хирург продвигается по множеству делений шкал 78, 82 на установочном элементе 72 до тех пор, пока не заметит, что установочный элемент 72 располагается параллельно остеотомии. Если установочный элемент 72 располагается параллельно остеотомии, тогда установочный элемент 64 со вторым элементом 22 также может устанавливаться параллельно остеотомии. После этого хирург затягивает винт 18 для прикрепления первого элемента 20 к стержню и удаляет установочный элемент 72. Затем хирург под давлением устанавливает установочный элемент 64 над вторым элементом 22 и располагает второй элемент 22 над первым элементом 20. Хирург использует установочный элемент 64 для поворота второго элемента 22 относительно первого элемента 20 до тех пор, пока хирург не заметит, что установочный элемент 64 располагается параллельно передней части остеотомии (Фиг.11D). Установочный элемент 64 под давлением устанавливается над вторым элементом 22 без необходимости поворотной регулировки установочного элемента 64 и второго элемента 22
Согласно Фиг.12A и 12B, в альтернативном способе воплощения настоящего изобретения используется направляющая с изменяемым углом 84 для облегчения регулировки первого и второго элементов 20, 22. После пробной фазы штанга 86 закрепляется на одной линии с резьбовым отверстием для винта в стержне 14. Угловая направляющая 84, имеющая одно или множество сквозных отверстий 88, каждое из которых располагается под углом к дистальной поверхности диска 90 направляющей 84, например, пять отверстий под углами 0°, 3°, 6°, 9° и 12°, продвигается через штангу 86 и возле костной остеотомии, причем штанга проходит через одно из отверстий 88. Направляющая 84 поворачивается вокруг оси штанги до обнаружения угла с костной остеотомией, который лучше всего соответствует дистальной поверхности диска 90 направляющей 84. Штанга 86 может продвигаться через различные отверстия 88 до обнаружения наилучшего углового соответствия. Значение угла отмечается в виде цифры на направляющей 84.
Согласно Фиг.12B, в данном способе первый элемент 20 и установочный элемент 72, каждый, включают угловые шкалы 92, 82, соответственно. Дополнительно установочный элемент 72 имеет 6° эксцентричное отверстие 94. При использовании первый элемент 20 и установочный элемент 72 совмещаются по цифре, определенной направляющей 84. После этого хирург поворачивает установочный элемент 72 и первый элемент 20 до тех пор, пока установочный элемент 72 не будет восприниматься как параллельный остеотомии. После этого хирург использует второй установочный элемент 64 так, как описано выше.
Согласно Фиг.13A и 13B, в альтернативном способе используется комплект направляющих с изменяемым углом 96 для облегчения регулировки первого и второго элементов 20, 22. После пробной фазы штанга 98 закрепляется на одной линии с резьбовым отверстием для приема винта в стержне 14. Каждая угловая направляющая 96 имеет одно отличающееся сквозное отверстие 100, располагающееся под углом к дистальной поверхности диска 102 направляющей 96, например, пять направляющих, каждая - с отверстиями под углами 0°, 3°, 6°, 9° или 12°. Каждая угловая направляющая 96 по очереди продвигается через штангу 98 и возле костной остеотомии, причем штанга проходит через отверстие 100. Направляющая 96 поворачивается вокруг оси штанги до обнаружения угла с костной остеотомией, который лучше всего соответствует дистальной поверхности диска 102 направляющей 96. Штанга 98 продвигается через различные направляющие 96 до обнаружения наилучшего углового соответствия. Каждая направляющая 96 имеет шкалу 104, и при определении наилучшего соответствия шкала наиболее соответствующей направляющей переносится на резекцию кости в качестве метки 106 на остеотомии.
Первый элемент 20, имеющий шкалу 70, крепится к стержню 14 с помощью винта 18, причем шкала 70 на первом элементе 20 выставляется на метку остеотомии 106 (Фиг.19B). После этого хирург использует второй установочный элемент 64 так, как описано выше.
Согласно Фиг.14A и 14B, анатомическая направляющая 110 включает первый элемент 112 и второй элемент 114, соединенный с первым элементом 112 таким образом, что второй элемент 114 может сдвигаться и наклоняться относительно первого элемента 112. Второй элемент 114 включает поверхность 116 для контактирования с костной остеотомией 40 таким образом, что в случае контакта поверхности 116 с костной остеотомией 40 относительный сдвиг и наклон второго элемента 114 относительно первого элемента 112 идентифицирует анатомический компонент имплантата 120 (Фиг.19A) для использования со стержнем имплантата 14. Направляющая 110 включает индикаторы 122, 124 и 126, облегчающие идентификацию требуемого анатомического компонента имплантата 120.
Согласно Фиг.15, в альтернативном варианте воплощения анатомической направляющей 110 первый элемент 212 анатомической направляющей 210 включает шток 230 с концевым выступом 232. При использовании концевой выступ 232 принимается плечевым стержнем 14 (Фиг.14A) для выполнения установки направляющей 210 через плечевой стержень 14, а также для обеспечения возможности поворота направляющей 210 относительно плечевого стержня (стрелка A). Второй элемент 214 принимается через шток 230 для возможности перемещения вдоль штока (стрелка B) и наклона относительно штока (стрелка C). Неограниченный относительный сдвиг и наклон второго элемента 214 относительно первого элемента 212, позиционируемого вместе со стержнем 14, обеспечивает возможность измерения сочетания угла наклона-варианта. Второй элемент 214 включает рабочий шаблон 240, имеющий первую часть 242 и вторую часть 244. Эти части 242, 244 вместе сдвигаются относительно штока 230, и первая часть 242 наклоняется относительно второй части 244 и штока 230.
Согласно тем же самым Фиг.14A и 14B, индикатор 122 включает шкалу 150 на обеих сторонах второй части 144 рабочего шаблона 140, определяющую относительный наклон первой части 142 данного рабочего шаблона 140, а индикатор 124 включает шкалу 152, определяющую относительный сдвиг рабочего шаблона 140. Индикатор 126 включает образование, например, вырез 154, на рабочем шаблоне 140, который используется для указания на остеотомии точной поворотной установки направляющей 110 относительно остеотомии 40. Вырез 154 располагается в той же самой плоскости, в которой происходит наклон первой части 142.
Снова согласно Фиг.15, рабочий шаблон 240 соединяется со штоком 230 штифтом 260 и барашковым винтом 262. Штифт 260 и барашковый винт 262 проходят внутри осевых пазов 263 в штоке 230 таким образом, что рабочий шаблон 240 может выполнять осевой сдвиг вдоль продольной оси X относительно штока 230. Первая часть 242 рабочего шаблона 240 наклоняется относительно второй части 244 вокруг оси Y штифта 260, и шкала 250 (Фиг.16A) показывает этот относительный наклон. Шток 230 и рабочий шаблон 240 совместно поворачиваются вокруг оси X вследствие некруговой формы, образованной сцепляющимися плоскими поверхностями 265 (Фиг.16D) штока 230, первой части 242 и второй части 244. Шток 230 и рабочий шаблон 240 также соединяются шплинтом 264, используемым для фиксации относительного осевого положения штока 230 и рабочего шаблона 240.
Первая часть 242 рабочего шаблона 240 включает юбку 266, которая определяет поверхность 216, находящуюся в контакте с костной остеотомией 40, и пару рычагов 268a, 268b. Юбка 266 определяет сквозное отверстие 270 для приема штока 230, а вторая часть 244 рабочего шаблона 240 проходит между рычагами 268а, 268b. Отверстие 270 обеспечивает зазор между юбкой 266 и штоком 230 для обеспечения наклонного движения юбки 266. Рычаги 268a, 268b оканчиваются указателями 269a, 269b (Фиг.18C), направленными на шкалу 250 для индикации относительного наклона. Каждый рычаг 268a, 268b определяет сквозное отверстие 271 для приема штифта 260, а рычаг 268a определяет второе сквозное отверстие с пазом 272 для приема барашкового винта 262. Сквозное отверстие с пазом 272 обеспечивает зазор с барашковым винтом 262 для обеспечения наклонного движения. Вторая часть 244 рабочего шаблона 240 определяет просвет 274 для приема штока 230, и пару противоположных сквозных отверстий 276 для приема барашкового винта 262.
Штифт 260 и барашковый винт 262 выравниваются по центру вдоль оси X. Однако, шплинт 264 располагается со смещением относительно оси таким образом, что шплинт 264 зацепляется с наружной поверхностью штока 230, как описывается ниже. Вторая часть 244 рабочего шаблона определяет сквозное отверстие 278 для приема шплинта 264.
Согласно Фиг.16A-16E, направляющая 210 включает три пружины смещения 280, 282 и 284. Шток 230 определяет осевой просвет 286 (Фиг.16B), в котором располагается пружина 280 между выступом 232 и штифтом 260. Пружина 280 действует на штифт 260 для обеспечения смещения рабочего шаблона 240 в направлении от выступа 232. Осевые пазы 263 сообщаются с просветом 286 для того, чтобы обеспечить прохождение штифта 260 и барашкового винта 262 через шток 230. Пружина 282 (Фиг.16C) располагается в шплинте сквозного отверстия 278 и смещает шплинт 264 для ввода в зацепление со штоком 230. Пружина 284 (Фиг.15 и 16B) является торсионной, действующей между штифтом 260 и второй частью 244 рабочего шаблона 240 для смещения первой части 242 в направлении положения с нейтральным наклоном.
Согласно, в частности, Фиг.16C-16E, шплинт 264 определяет паз 290, образующий выступ 292. Выступ 292 входит в зацепление с защелками 294, сформированными на поверхности штока 230. Для сдвига рабочего шаблона 240 относительно штока 230 пользователь нажимает на первую часть 244 рабочего шаблона 240. При этом зацепление между передней частью кулачка 293 выступа 292 шплинта и сопрягающейся передней частью кулачка 295 штока 230 вынуждает шплинт 264 далее воздействовать против усилия пружины 282, приводя, таким образом, к расцеплению выступа 292 с защелкой 294. Когда пользователь достигает определенного осевого положения вдоль штока 230, пружина 282 вынуждает выступ 292 шплинта 264 перейти в зацепление со следующей защелкой 294. Шкала 252 показывает относительное осевое положение рабочего шаблона 240. Для возврата направляющей 210 в нейтральное осевое положение пользователь нажимает шплинт 264, сжимая пружину 282 и позволяя пружине 280 осуществить возврат штока 230 в нейтральное положение относительно рабочего шаблона 240. Контакт между барашковым винтом 262 и пазом 263 штока 230 служит стопором.
Опять же, согласно Фиг.5A и 5B, во время осуществления восстановительной хирургии плечевого сустава хирург формирует отверстие в кости для приема стержня имплантата 14 и формирует плечевую остеотомию 40. Отверстие включает канал 45, в который устанавливается стержень имплантата 14. Стержень имплантата 14 определяет отверстие 46, в которое может помещаться выступ 32. Как можно видеть на Фиг.5B, стержень имплантата 14 обычно не ориентируется параллельно остеотомии 40. Для выбора компонента имплантата, который должен обеспечивать известную ориентацию данного имплантата относительно остеотомии 40, например, параллельную ориентацию, хирург использует направляющую 210.
Теперь согласно Фиг.17 и 14, при использовании, хирург устанавливает выступ направляющей (не показан) в отверстие стержня 46 и сдвигает рабочий шаблон 140 вниз к штоку 130 по направлению к остеотомии 40. Путем поворота направляющей 110 относительно стержня 14 и наклона рабочего шаблона 140 хирург находит такую ориентацию направляющей, при которой поверхность 116 юбки 166 ровно лежит на остеотомии 40 (Фиг.14A).
Согласно Фиг.18A-18E, при использовании, после создания остеотомии 40 и канала 45 для стержня 14 в плечевой кости 42 (Фиг.18A) хирург располагает стержень 14 в канале 45. Направляющая для установки под различными углами 210 затем может быть использована для определения положения метки 296 на поверхности кости 44, а также требуемого угла установки и длины, например, компонента 120 (Фиг.19). Хирург манипулирует направляющей 210 (Фиг.18B) до тех пор, пока юбочная часть 266 направляющей 210 не будет ровно лежать на поверхности кости 44 (Фиг.18C). Например, путем поворота направляющей 210 относительно стержня 14 и наклона рабочего шаблона 240 вокруг оси Y штифта 260 хирург находит такую ориентацию направляющей, при которой поверхность 216 юбки 266 ровно лежит на остеотомии 40. После этого хирург поворачивает барашковый винт 262 для фиксации относительного наклона второй части 244 рабочего шаблона 240, и отмечает место 296 (Фиг.18D) на остеотомии, соответствующее вырезу 254, для индикации поворотной точной установки. Шплинт 264 автоматически фиксирует относительное осевое положение рабочего шаблона 240. Как показано на Фиг.18E, шкалы 250, 252 на направляющей 210 показывают требуемый угол установки и длину, соответственно, компонента 120.
После этого хирург удаляет направляющую 210 из стержня 14 и выбирает компонент имплантата 120, соответствующий указанному наклону и высоте (осевое положение), для получения требуемой ориентации компонента (Фиг.19A и 19B). В случае выполнения имплантации отметка или метка 298 на имплантате совмещается с отмеченным местом 296. Шкала наклона и отмеченное место 296 учитывают непараллельность ориентации канала 45 относительно передней части остеотомии 40, а шкала высоты учитывает фактическую глубину канала 45, сформированного хирургом, и поэтому величина углубления в кость стержня 14 у пациентов может отличаться.
Согласно Фиг.20A и 20B, в альтернативном варианте воплощения настоящего изобретения направляющая 300 включает первый элемент, например, шток 302, и второй элемент, например, рабочий шаблон 304, сформированный из одной части, которая сдвигается по оси и наклоняется относительно штока 302. В отличие от описанной выше направляющей 110, 210, вместо обеспечения непрерывной регулировки вдоль одной плоскости наклона рабочий шаблон 304 направляющей 300 может устанавливаться в ряд дискретных углов наклона путем наклона вдоль ряда дискретных плоскостей. В приведенном для иллюстрации варианте воплощения настоящего изобретения рабочий шаблон 304 может устанавливаться под четырьмя углами (0°, 2,5°, 5° и 7,5°) путем наклона вдоль двух дискретных плоскостей 306, 308.
Шток 302 включает шкалу 309 для индикации относительного сдвига рабочего шаблона 304, а юбка 310 рабочего шаблона 304 включает образования, например, вырезы 312, 314, 316 и 318, предназначенные для индикации на остеотомии 40 относительного поворота направляющей 300. Согласно Фиг.20С, рабочий шаблон 304 имеет стенку 320, определяющую просвет 321, в который входит шток 302. Стенка 320 имеет четыре квадранта 322, 324, 326 и 328, каждый из которых располагается под другим углом относительно штока 302. Рабочий шаблон 304 и шток 302 соединяются штифтом 330, располагающимся внутри канюляции 332 сферического шарика 334. Шток 302 определяет просвет 344 для приема шарика 334, а пазы 346 - для приема штифта 330. Промежуток между штифтом 330 и стенкой 336 сферического шарика 334, определяющий канюляцию 332, позволяет выполнять относительный наклон рабочего шаблона 304 вдоль плоскостей 306, 308.
Шток 302 включает концевой выступ 340 для установки в стержень 14, и пружину 342, располагающуюся внутри просвета для штока 344 между выступом 340 и шариком 334, которые предназначены для смещения рабочего шаблона 304 в направлении от выступа 340.
При использовании хирург располагает направляющую 300 на стержне имплантата, выбирает один из четырех углов наклона и наклоняет рабочий шаблон 304 относительно штока 302 для установки данного рабочего шаблона 304 под выбранным углом. Удерживая рабочий шаблон 304 под выбранным углом, хирург перемещает рабочий шаблон 304 по направлению к остеотомии 40 и поворачивает направляющую 300 для определения того, как плоская юбка 310 располагается на поверхности остеотомии 44. Хирург может повторить этот процесс для всех четырех углов с целью определения наилучшей ориентации рабочего шаблона 304.
После этого хирург отмечает ориентацию поворота на остеотомии 40 с использованием выреза, расположенного напротив расположенной под углом поверхности, например, если наклон 7,5° обеспечивает наилучшее соответствие, хирург должен использовать вырез 318 для маркировки ориентации поворота, например, как метка 331. После этого хирург отмечает осевую шкалу 309 для выбора высоты имплантата и угол наклона для выбора угла установки имплантата.
Согласно Фиг.21, с целью оказания помощи в индикации относительного сдвига рабочего шаблона 304 направляющая 300 может включать отдельный скользящий компонент 350, перемещающийся вместе с рабочим шаблоном 304 относительно штока 302. Когда рабочий шаблон 304 освобождается и двигается вверх усилием пружины 342, скользящий компонент 350 остается на месте относительно шкалы 309. Скользящий компонент 350 имеет сферическую поверхность 352, соприкасающуюся со сферической фаской 354 возле конца стенки 320 рабочего шаблона, способствующей выполнению наклона рабочего шаблона 304.
На Фиг.22 и 23 показана дополнительная альтернативная реализация направляющей, которая включает шток 400 у ряда рабочих шаблонов 402. В приведенном для иллюстрации варианте воплощения настоящего изобретения показаны три рабочих шаблона 404, 406 и 408, хотя со штоком 400 можно использовать больше или меньше рабочих шаблонов 402. Каждый рабочий шаблон 402 включает отверстие 410, ориентированное под углом, например, 0°, 5° и 10°. Шток 400 имеет нарезной конец 412 для навинчивания стержня 14. Каждый из рабочих шаблонов 402 включает вырез 414 для маркировки точной поворотной установки рабочего шаблона 402 на остеотомии.
При использовании хирург присоединяет шток 400 к стержню 14 и выбирает один из рабочих шаблонов 402. Хирург сдвигает рабочий шаблон 402 вниз к штоку 400, причем рабочий шаблон 402 ориентируется относительно штока 400 по углу отверстия 410, и поворачивает рабочий шаблон 402 относительно штока 400 в попытке выровнять поверхность 416 рабочего шаблона 402 с остеотомией 40. Хирург может повторить этот процесс с каждым рабочим шаблоном 402 для определения угла, при котором достигается наилучшее выравнивание.
Согласно Фиг.25B и Фиг.6A-6C, с целью оказания помощи хирургу при задании угла установки соединителя 10 используется первый элемент 20 со шкалой 560. Путем совмещения шкалы 560 со шкалой на установочном элементе 586 (описывается ниже), которая, в свою очередь, совмещена с меткой 564 (Фиг.25D) на поверхности кости 44, первый элемент 20 размещается под требуемым углом установки; метка 564 предварительно определяется хирургом для соответствия точке установки, при которой выполняется требуемый наклон и изгиб назад, как описано выше. При использовании для регулировки вектора 50 и оси Z после того, как первый элемент 20 крепится к стержню 14, второй элемент 22 соединяется с первым элементом 20 и поворачивается до совмещения вектора 50 и оси Z.
Хирург использует установочный элемент 586, показанный на Фиг.24A и 24B, для поворота первого и второго элементов 20, 22 вокруг оси винта X. Установочный элемент 586 определяет первое отверстие 602, предназначенное для приема первого элемента 20 при фрикционном сцеплении, и определяет второе, большее отверстие 604, предназначенное для приема второго элемента 22 при фрикционном сцеплении. Установочный элемент 586 имеет рифленую наружную окружность 606 для облегчения ручного поворота установочного элемента и фрикционно сцепленного элемента.
Согласно Фиг.25A-25D, после этого хирург использует пробный соединитель 580 для проверки того, что угол наклона, длина и установочная метка 564 дают желаемый результат. На Фиг.25B показана шкала 560 на первом пробном элементе 582 (соответствует элементу 20) пробного соединителя 580, выровненная с соответствующей шкалой 591 (нулевая шкала) на установочном элементе 586. Для позиционирования первого пробного элемента 582 так, как показано на Фиг.25 В, после прикрепления хирургом первого пробного элемента 582 к стержню 14 с помощью винта 18 (Фиг.25A), хирург передвигает установочный элемент 586 через первый пробный элемент 582 с выровненными шкалами 560, 591. После этого хирург поворачивает установочный элемент 586 и первый пробный элемент 582 как один узел вокруг винта 518 для выравнивания угловой шкалы 588 (согласно углу, демонстрируемому направляющей 110, 210, 300) с меткой 564 (Фиг.25C, здесь угол равен 8,5°). После этого хирург затягивает винт 18 для закрепления положения первого пробного элемента 582.
Для установки второго пробного элемента 584 (соответствует элементу 22) пробного соединителя 580 хирург удаляет установочный элемент 586 из первого пробного элемента 582, передвигает второй пробный элемент 584 (Фиг.25D) через первый пробный элемент 582, поворачивает на 180° установочный элемент 586 и передвигает установочный элемент 586 через второй пробный элемент 584 (Фиг.25E). Хирург поворачивает установочный элемент 586 и второй пробный элемент 584 как один узел до тех пор, пока плоская поверхность 593 установочного элемента не станет параллельной поверхности кости 44. Второй пробный элемент 584 выбирается для обеспечения требуемой длины, указанной направляющей 110, 210, 300. Компонент пробной головки 594 (Фиг.25G) затем соединяется с пробным соединителем 580, и головка 594 поворачивается в положение, обеспечивающее оптимальный охват поверхности кости 44. После этого хирург проводит имплантат через пробный диапазон движений.
Если пробный соединитель 580 обеспечивает требуемую функциональность, хирург удаляет пробный соединитель 580, выбирает элемент 20, имеющий требуемую длину, и повторяет описанную выше процедуру для пробного соединителя с целью присоединения элементов 20, 22 к стержню 14. После правильной настройки (Фиг.25F) хирург использует импактор 600 (Фиг.26A-26C) для такого воздействия на элемент 22, чтобы конусы 24, 26 (Фиг.2) прикрепили элемент 22 к элементу 20, и затем удаляет импактор 600 и установочный элемент 586. После этого хирург передвигает головку 12 через элемент 22, поворачивает головку 12 в положение, обеспечивающее оптимальный охват поверхности кости 44, и воздействует на головку 12 таким образом, чтобы конусы 28, 30 (Фиг.2) прикрепили головку 12 к элементу 22.
Согласно Фиг.27A-27C, в альтернативном варианте воплощения настоящего изобретения установочный элемент 610 включает внутренний лепестковый рисунок 612, который наносится через стенку 614 меньшего отверстия 602 и в стенке 616 большего отверстия 604. Установочный элемент 610 используется с импактором 620 (Фиг.27D), имеющим соответствующий лепестковый рисунок 622, контактирующий с лепестковым рисунком 612. Это позволяет импактору 620 прямо контактировать со вторым элементом 22 таким образом, что усилие импакции прикладывается непосредственно ко второму элементу 22, а не передается через установочный элемент, способствуя облегчению удаления установочного элемента 610 из второго элемента 22. В качестве альтернативы, как показано на Фиг.28, установочный элемент 630 включает две части 632, 634, соединенные петлей 636. Каждая часть 632, 634 включает выступы 638a, 638b, на которые хирург надавливает в направлении навстречу друг другу для открывания частей 632, 634 с целью их удаления из второго элемента 22. Части 632, 634, каждая, могут задавать лепестковые рисунки, как показано на Фиг.27A-27C.
На Фиг.29A-29C показан состоящий из трех частей установочный элемент 640, имеющий первую и вторую части 642, 644, скрепленные вместе наружным кольцом 646. Для удаления установочного элемента 640 из наружного элемента 22 хирург снимает наружное кольцо 646 и разделяет части 642, 644.
Согласно Фиг.31A и 31B, с целью оказания помощи хирургу в установке углового соединителя 10 предоставляется первый элемент 20 с угловой шкалой 660, например, шкалой с представлением угла 0-12°, а также предоставляется второй элемент 22 с угловой шкалой 662, например, шкалой с представлением угла 0-12°. Путем совмещения аналогичных показателей угловых шкал на элементах 20, 22 (здесь для иллюстрации показан угол 9,0°) соединитель устанавливается под требуемым углом установки. При использовании, для регулировки вектора 50 и оси Z (Фиг.6A), хирург совмещает аналогичные показатели угловых шкал с меткой 664 на поверхности кости 44; метка 664 предварительно определяется хирургом для обеспечения соответствия точке установки, дающей требуемый наклон и изгиб назад, как описано выше.
Согласно Фиг.30, хирург может использовать пробный соединитель 680 для проверки того, что угол наклона, длина и установочная метка 664 дают желаемый результат. На Фиг.30 показаны первый и второй элементы 682, 684 пробного соединителя 680, выровненные друг с другом при угле наклона, указанном меткой 664. Хирург может затем выбрать второй элемент 684, обеспечивающий требуемую длину, указанную направляющей 110, 210, 300, соединить компонент пробной головки 594 (Фиг.25G) с пробным соединителем 680 и повернуть головку 594 в положение, обеспечивающее оптимальный охват поверхности кости 44. После этого хирург выполняет пробу путем осуществления пробного диапазона движений.
Опять же, согласно Фиг.31A и 31B, в том случае, если пробный соединитель 680 обеспечивает требуемую функциональность, хирург выбирает элемент 20, имеющий требуемую длину, и использует винт 18 для прикрепления элемента 20 к стержню 14. Хирург поворачивает элемент 20 вокруг оси X для установки согласно требуемому углу установки на одной линии шкалы 660 с меткой 664. После этого хирург затягивает винт 18 для прикрепления элемента 20 к стержню 14, продвигает элемент 22 через элемент 20 и поворачивает элемент 22 для совмещения шкалы 662 согласно требуемому углу установки с соответствующей шкалой 660 на элементе 20 и меткой 64. После этого хирург воздействует на элемент 22 таким образом, что конусы 24, 26 прикрепляют элемент 22 к элементу 20, передвигает головку 12 через элемент 22, поворачивает головку 12 в положение, обеспечивающее оптимальный охват поверхности кости 44, и воздействует на головку 12 таким образом, что конусы 28, 30 прикрепляют головку 12 к элементу 22 (Фиг.2).
Был описан ряд вариантов воплощения настоящего изобретения. Тем не менее, следует понимать, что можно осуществлять различные модификации без отклонения от сущности и объема настоящего изобретения. Например, элемент 20 может быть цельным компонентом стержня 14, который нельзя перемещать относительно стержня 14. Такой цельный компонент будет обладать более ограниченной регулировочной способностью. Сам стержень 14 может быть единым цельным компонентом, или же стержень 14 может включать тело стержня 14a и проксимальное тело 14b (Фиг.3), которое может соединяться и регулироваться путем поворота относительно тела стержня 14a перед прикреплением проксимального тела 14b к телу стержня 14a. Дополнительно, вместо совместного поворота первого элемента 112, 212 и второго элемента 114, 214 относительно стержня 14 (Фиг.14 и 15), второй элемент 114, 214 можно поворачивать относительно первого элемента 112, 212. Стенка 320 по Фиг.20C может иметь больше или меньше квадрантов и способна наклоняться вдоль большего или меньшего количества плоскостей. Анатомическая направляющая 110, 210, 300 показана в использовании со стержнем, имплантированным в плечевую кость. Однако, анатомическую направляющую 110, 210, 300 можно также использовать с имплантатами и в других костях.
Соответственно, другие воплощения настоящего изобретения находятся в пределах объема приводимой ниже формулы изобретения.
Реферат
Изобретение относится к медицине. Анатомическая направляющая для выбора промежуточного компонента имплантата для использования в артропластике включает первый элемент и второй элемент. Второй элемент соединяется с первым элементом таким образом, что второй элемент может сдвигаться и наклоняться относительно первого элемента. Второй элемент включает поверхность для контактирования с костной остеотомией таким образом, чтобы при находящейся в контакте с костной остеотомией поверхности относительный сдвиг и наклон второго элемента относительно первого элемента идентифицировал компонент имплантата для использования с остеотомией. Указанная направляющая включает индикаторы, идентифицирующие компонент имплантата. Изобретение обеспечивает возможность располагать стержень имплантата в плечевой кости безотносительно к ориентации плечевой остеотомии 16 з.п. ф-лы, 31 ил.
Комментарии