Каркас искусственной стопы - RU2055549C1
Код документа: RU2055549C1
Чертежи


Описание
Изобретение относится к медицинской технике, а именно к протезам нижних конечностей.
Известна искусственная стопа, содержащая щиколотку, плюсне-фаланговый шарнир, пяточный отдел, передний отдел, амортизатор и элементы крепления. При этом на щиколотке установлен шарнир, ось которого совпадает с физиологической осью Шопаровского сустава. На оси шарнира расположен двухплечевой рычаг, одно плечо которого связано с плюсне-фаланговым шарниром, а под другим плечом в пяточном отделе стопы расположена цилиндрическая пружина. Недостатками известного протеза являются относительная сложность конструкции, низкая технологичность при изготовлении, неспособность моделировать задний упругий толчок.
Известен также протез голени на усеченную конечность, содержащий стопу и эластичную оболочку, в которую заключена щиколотка с подвижно сочлененным каркасом стопы. Недостатком этого протеза являются плохие амортизационные возможности, недостаточная устойчивость при ходьбе.
Наиболее близким по технической сущности к заявляемому каркасу искусственной стопы является конструкция известного каркаса, содержащая оболочку с наполнителем, щиколотку и рессору, которая выполнена из двух ветвей, одна из которых повторяет кривизну естественного свода, а свободный конец другой ветви соприкасается с первой в области плюсне-фалангового сочленения. К недостаткам прототипа можно отнести сложность в изготовлении, невозможность максимально точного моделирования функций естественной стопы человека, отсутствие эффекта сопротивления распластыванию, что приводит к хромоте, укорочению шага и неустойчивости при ходьбе.
Изобретение направлено на решение задачи, заключающейся в создании искусственной стопы человека, функциональность которой максимально точно отвечала бы функциональности стопы к норме.
Целью изобретения является создание конструкции, способной в отличие от известной, моделировать рессорную функцию, эффект распластывания и сопротивления разрушению стопы в норме, аккумулировать энергию деформации элементов протеза, необходимую для выполнения протезом заднего толчка, с целью приведения уровня энергозатрат пациента при ходьбе в норму.
Поставленная задача решается тем, а цель достигается тем, что каркас искусственной стопы содержит щиколотку, волнообразную рессору с двумя впадинами волны в пяточной и плюсне-фаланговой области и вершинами волны в геленочной части стопы, демпфер, расположенный между щиколоткой и рессорой.
Отличительной особенностью конструкции является следующее. Рессора выполнена с переменной по длине жесткостью, убывающей к ее концам. В каркас искусственной стопы введен консольный элемент, расположенный под щиколоткой и прикрепленный к ее концам. В каркас искусственной стопы введен консольный элемент, расположенный под щиколоткой и прикрепленный к ней. Рессора прикреплена вершиной волны к консольному элементу, который выполнен с переменной по длине жесткостью, убывающей к плюсне-фаланговой области. Демпфер выполнен клиновидным и своей утолщенной частью расположен между консольным элементом и рессорой в месте сбега волны рессоры к пяточной части.
Согласно второму пункту формулы изобретения консольный элемент наклонен к вертикальной оси щиколотки на угол β=92-97о. Диапазон значений угла наклона консольного элемента определен на основании расчетов, моделирования и экспериментов.
Согласно третьему пункту формулы изобретения щиколотка и консольный элемент выполнены в виде единого элемента L-образной формы.
Согласно четвертому пункту формулы изобретения консольный элемент и рессора выполнены из полимерного композиционного материала, механические
характеристики которого связаны соотношениями:
σв≥ 270 МПа

Е модуль упругости материала в продольном направлении.
Указанные рациональные значения физико-механических характеристик материала и их соотношение определены на основании результатов расчета и подтверждены экспериментально. Материалом для консольного элемента и рессоры может служить, например, углепластик, стеклопластик органопластик и их комбинации в изделии.
Согласно пятому пункту формулы изобретения, плоскость расположения впадин волн рессоры к вертикальной оси на угол 84-87о. Оптимальный диапазон значений данного угла определен по результатам моделирования и экспериментов.
Согласно шестому пункту формулы изобретения соотношение толщин рессоры (в
предположении, что модуль упругости материала и ширина рессоры по длине постоянны) представится в виде:

h2 толщина рессоры в геленочной части стопы.
Экспериментально подтверждено, что данный диапазон соотношения указанных толщин рессоры обеспечивает оптимальную жесткость геленочного отдела стопы.
Каркас снабжен консольным элементом, предназначенным для получения
зоны сопротивления разрушению, жесткость которого убывает к плюсне-фаланговой области стопы, что способствует его плавному включению в работу. Демпфер выполнен клиновидным и своей утолщенной частью
расположен между консольным элементом и рессорой в месте сбега волны рессоры к пяточной части для того, чтобы привести в норму жесткость пяточного отдела искусственной стопы и наклонить плоскость
расположения впадин волн рессоры к вертикальной оси на угол α= 84-87о, что позволило бы при снятии нагрузки на стопу в момент переноса приподнимать носочную часть протеза на 1-1,5
см
во избежание столкновения носка с поверхностью ходьбы. Консольный элемент наклонен к вертикальной оси щиколотки на угол β= 92-97о для обеспечения его своевременного включения в
работу при моделировании зоны сопротивления разрушению. Щиколотка и консольный элемент могут быть выполнены зацело, что приведет к аккумуляции большего количества внутренней энергии. Это может быть
использовано при создании специального протеза стопы для пациентов, ведущих активный физический образ жизни, например, искусственной стопы для спортсменов. Консольный элемент и рессора выполнены из
полимерного композиционного материала, для которого справедливы неравенства:
σв≥ 270 МПа

Е модуль упругости материала в продольном направлении.
Это позволяет повысить эластичность деталей без снижения их прочностных характеристик, тем самым в 2-3 раза увеличить их усталостные свойства.
Выполнение конструкции таким образом позволяет моделировать рессорную функцию. Эффект распластывания и сопротивления распластывания стопы в норме, аккумулировать энергию деформации элементов протеза, необходимую для выполнения протезом заднего толчка, с целью приведения уровня энергозатрат пациента при ходьбе в норму, создавать высокоэффективные протезы стоп для занятий спортом, увеличить шаг и скорость ходьбы, выравнять походку пациента.
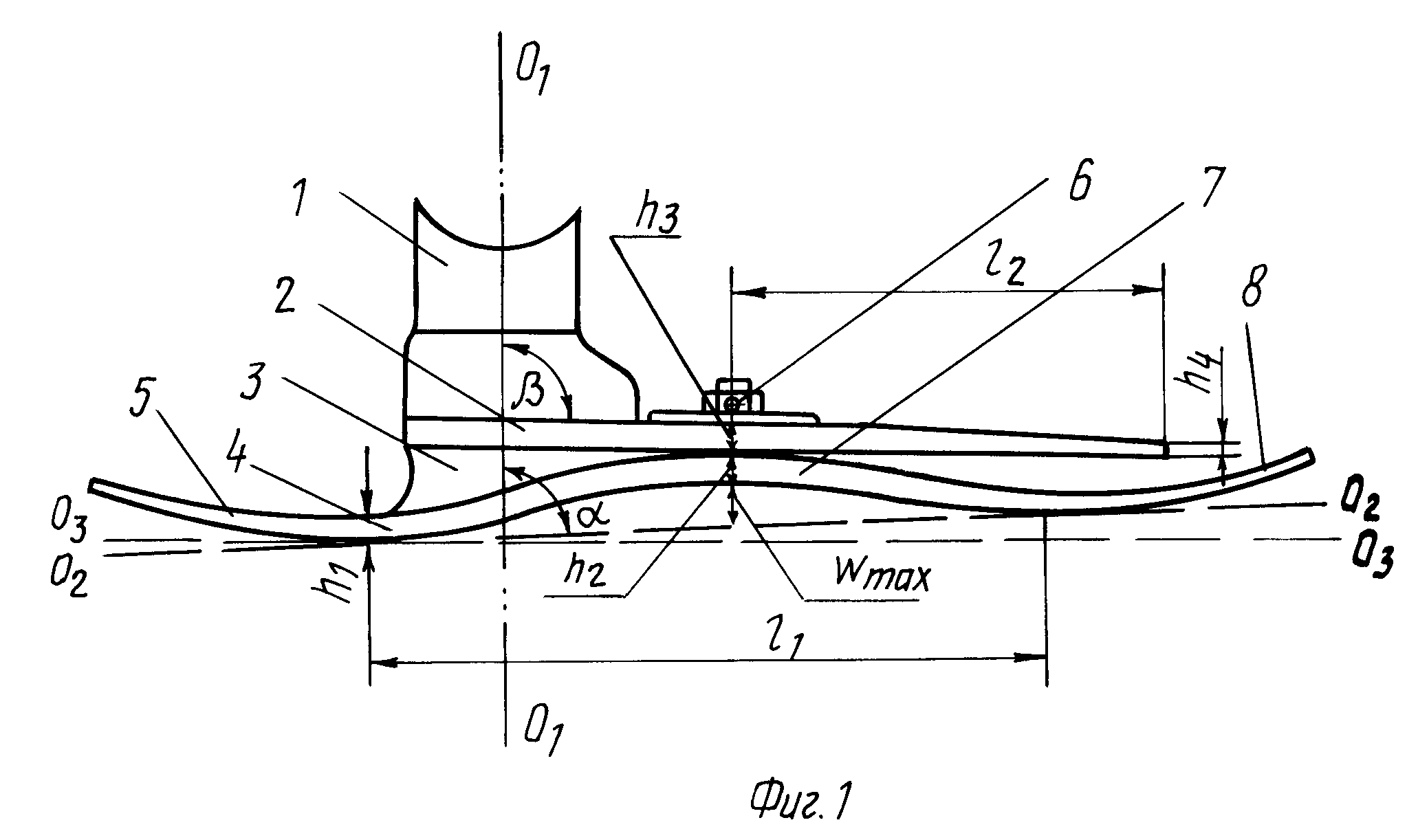
На фиг. 1 представлен общий вид каркаса искусственной стопы; на фиг. 2 общий вид каркаса искусственной стопы со щиколоткой и консольным элементом, выполненными в виде единого элемента L-образной формы.
Каркас искусственной стопы содержит щиколотку 1, консольный элемент 2, демпфер 3 и рессору 4. Рессора 4 выполнена волнообразной с двумя впадинами волны, одна из которых находится в пяточной части 5. Рессора 4 посредством винтового соединения 6 прикреплена к вершине волны геленочной части 7 стопы к консольному элементу 2. Вторая впадина волны рессоры 4 расположена в плюсне-фаланговой области 8. Рессора 4 выполнена с переменной по длине жесткостью, убывающей к пяточной части 5 и плюсне-фаланговой части 8. Переменная по длине жесткость обеспечивается за счет выполнения ее с переменным по длине поперечным сечением. Консольный элемент 2 выполнен с переменной по длине жесткостью, убывающей в направлении к плюсне-фаланговой части 8 рессоры 4, что обеспечивается путем последовательного уменьшения поперечного сечения консольного элемента, по меньшей мере, начиная от его места контакта с геленочной частью 7 рессоры 4 в направлении ее плюсне-фаланговой части 8. Демпфер 3 выполнен клиновидным и своей утолщенной частью расположен под щиколоткой 1 между консольным элементом 2 и рессорой 4 в месте сгиба волны рессоры к пяточной части 5.
Консольный элемент 2 целесообразно наклонить к вертикальной оси О1-О1 щиколотки на угол, например, 95о.
В ряде случаев щиколотку 1 и консольный элемент 2 целесообразно выполнить зацело в виде L-образного элемента (см. фиг. 2).
Консольный элемент 2 и рессору 4 целесообразно выполнить из полимерного композиционного материала, например из углепластика, для которого предел прочности σв 400 МПа, а модуль упругости в продольном направлении Е 40000 МПа.
Плоскость О2-О2 расположения впадин волн рессоры 4 целесообразно наклонить к вертикальной оси О1-О1 щиколотки 1 под углом, например, 87о.
Выполняя рессору 4 с переменным поперечным сечением, последовательно уменьшающимся в обе стороны от геленочной части 7 стопы, целесообразно отношение толщины рессоры в пяточной 5 и плюсне-фаланговой 8 частях (h1 ) к толщине рессоры в геленочной части стопы (h2) принять равным, например, 1,5.
Для учета антропометрических особенностей каждого пациента при проектировании каркаса искусственной стопы Литвином Н.В. была разработана программа "стопа". Конкретные значения проектировочных величин элементов каркаса искусственной стопы для пациента весом 70 кг, рост которого 175 см при размере обуви 42, сведены в табл. 1 и 2.
Для удобства использования изделия пациентом и с целью придания ему завершенного косметического вида каркаса искусственной стопы помещается в эластичную оболочку.
В процессе ходьбы искусственная стопа проходит четыре основные фазы: фаза переднего толчка, фаза переката, задний толчок и перенос стопы. Во время столкновения протеза с поверхностью ходьбы деформиpуется пяточный отдел 5 рессоры 4 и происходит накопление внутренней энергии. При этом ударная нагрузка на изделие компенсируется упругим демпфером 3. На этом фаза переднего толчка заканчивается и наступает фаза переката, во время которой происходит постепенное распределение нагрузки между пяточным 5, геленочным 7, а затем и плюсне-фаланговым 8 отделами искусственной стопы. При этом осуществляется распластывание рессоры 4 и выполняется рессорная функция стопы. Происходит дальнейшее накопление внутренней энергии рессорой 4. При достижении сводом стопы в геленочной части 7 своего максимального значения Wmax включается в работу консольный элемент 2, взаимодействуя своей передней частью с плюсне-фаланговой частью 8 рессоры 4, что позволяет смоделировать биологически оправданный эффект сопротивления распластыванию путем увеличения жесткости деформируемой системы. Далее нагрузка переносится на плюсне-фаланговую часть 8 искусственной стопы, что вызывает дальнейшую деформацию рессоры 4 и консольного элемента 2 и способствует продолжению накопления конструкцией внутренней энергии. Во время прохождения центра тяжести тела пациента через положение равновесия происходит отдача аккумулированной внутренней энергии и выполняется упругий задний толчок. При снятии нагрузки на стопу наступает фаза переноса, демпфер 3 переходит в недеформированное состояние, отжимая тем самым плюсне-фаланговую часть протеза вверх на величину, позволяющую избежать столкновения носка протеза стопы с поверхностью ходьбы.
Основным техническим свойством заявляемого каркаса искусственной стопы является эффект аккумуляции внутренней энергии деформации элементов протеза путем взаимодействия при ходьбе рессоры, демпфера и консольного элемента, с целью моделирования упругого заднего толчка, эффекта распластывания и сопротивления распластыванию рессорной функции стопы.
В сравнении с базовым
объектом, в
качестве которого выбран прототип, заявляемый каркас искусственной стопы обладает следующими преимуществами:
приводится в норму уровень энергозатрат пациента при ходьбе;
модулируются
рессорная функция, эффект распластывания и сопротивления распластыванию стопы в норме;
нормализуется шаг пациента;
повышается устойчивость при ходьбе;
изделие
проектируется
в строгом соответствии с антропометрическими данными пациента;
применение изделия дает возможность вести физически активный образ жизни, заниматься спортом;
значительно повышается
технологичность и надежность искусственной стопы.
Реферат
Изобретение относится к медицинской технике, а именно к протезам нижних конечностей. Решаемой задачей является создание искусственной стопы человека, функциональность которой максимально точно отвечала бы функциональности стопы в норме. Каркас искусственной стопы содержит щиколотку 1, волнообразную рессору 4 с двумя впадинами волны в пяточной и плюсне-фаланговой области и вершинами волны в геленочной части стопы, демпфер 3, расположенный между щиколоткой и рессорой. 5 з. п. ф - лы, 2 ил., 1 табл.
Формула
σв≥ 270 МПа ;

5. Каркас по п.1, отличающийся тем, что плоскость расположения впадин волн рессоры наклонена к вертикальной оси щиколотки под углом 84 - 87o.
h2/h1 = 1,2 - 1,7.
Комментарии