Искусственная стопа - RU2112466C1
Код документа: RU2112466C1
Чертежи
Описание
Изобретение относится к медицинской технике и предназначено для использования в протезах нижних конечностей.
Известна искусственная стопа (Великобритании N 8305191, кл. A 61 F 2/66, 1983), содержащая облицовку, ладьевидный вкладыш, состоящий из верхней и нижней пластин, соединенных между собой в их задней части. Между пластинами размещен опорный стержень, регулирующий при своем продольном перемещении жесткость стопы, продольное перемещение стержня обеспечивается соединенным с ним винтом.
Основным недостатком данной конструкции является:
- заднее (т. е. позади центра лодыжки) расположение опорного стержня, что, обеспечивая изменение
жесткости стопы, не позволяет изменить местоположение линии переката;
- консольное крепление установочного винта, что не обеспечивает надежную фиксацию и удержание соединенного с ним опорного
стержня в нужном положении, особенно от боковых нагрузок на стержень, возникающих при поперечных перемещениях концов пластин вкладыша друг относительно друга в процессе эксплуатации стопы.
Наиболее близкой по технической сущности к предложенному решению является искусственная стопа (пат. РФ N 2062075, кл. A 61 F 2/66, 31.05.94). Эта стопа включает в себя корпус, передняя часть которого выполнена выступающей вперед консолью, заформованный в облицовку вкладыш и опорную планку, которая установлена на направляющих консоли корпуса с возможностью ее продольного перемещения. При перестановке опорной планки вдоль направляющих может меняться как жесткость переднего отдела стопы, так и местоположение линии переката стопы, которые могут устанавливаться в соответствии с индивидуальными особенностями пациента. Фиксация опорной планки на консоли корпуса осуществляется посредством двух металлических скоб, каждая из которых охватывает концы планки и устанавливается в отверстия, заранее выполненные в направляющих консоли с определенным шагом.
Основными недостатками рассматриваемой конструкции является:
- необходимость разборки стопы, т.е.
отсоединения облицовки с вкладышем от голеностопного сустава, для осуществления перестановки и фиксации планки каждый раз, когда возникает необходимость изменения положения линии переката стопы;
- возможность проведения только дискретной регулировки линии переката стопы в соответствии с шагом отверстий для фиксации планки, выполненных на направляющих консоли.
Техническим результатом предложенного технического решения является повышение удобства использования искусственной стопы с регулируемой линией переката за счет устранения необходимости разборки стопы для переустановки опорной планки с одновременным обеспечением непрерывной (бесшаговой) регулировки линии переката стопы в зоне между крайними положениями опорной планки.
Сущность изобретения заключается в том, что в искусственную стопу, содержащую вкладыш, заформованный в облицовку, корпус с консолью, опорную планку, установленную на направляющих консоли корпуса, введен механизм перемещения опорной планки, выполненный в виде ходового винта, закрепленного внутри корпуса в шарнирных опорах и соединенного с опорной планкой, при этом в корпусе и облицовке выполнены сквозные отверстия, соосные с ходовым винтом.
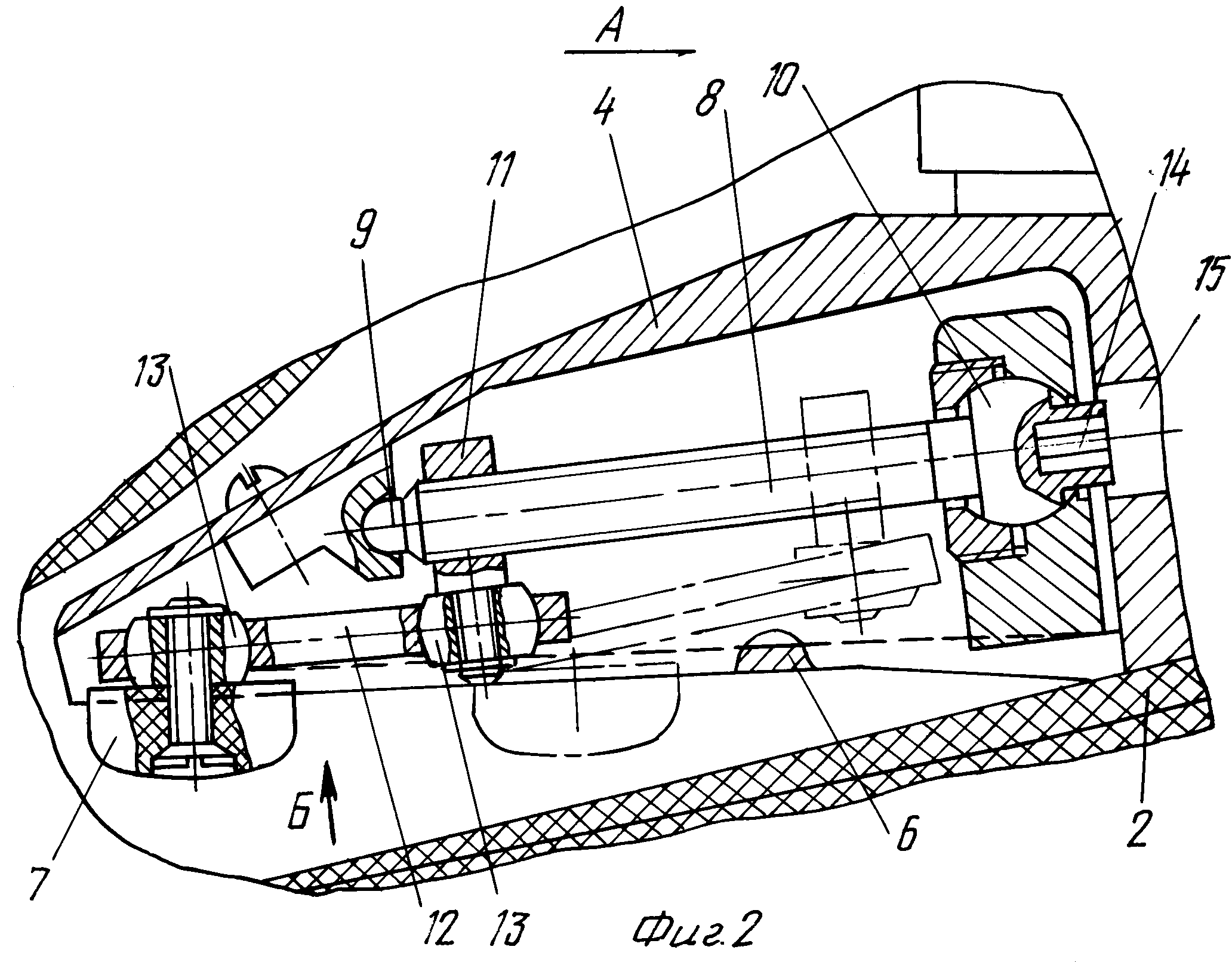
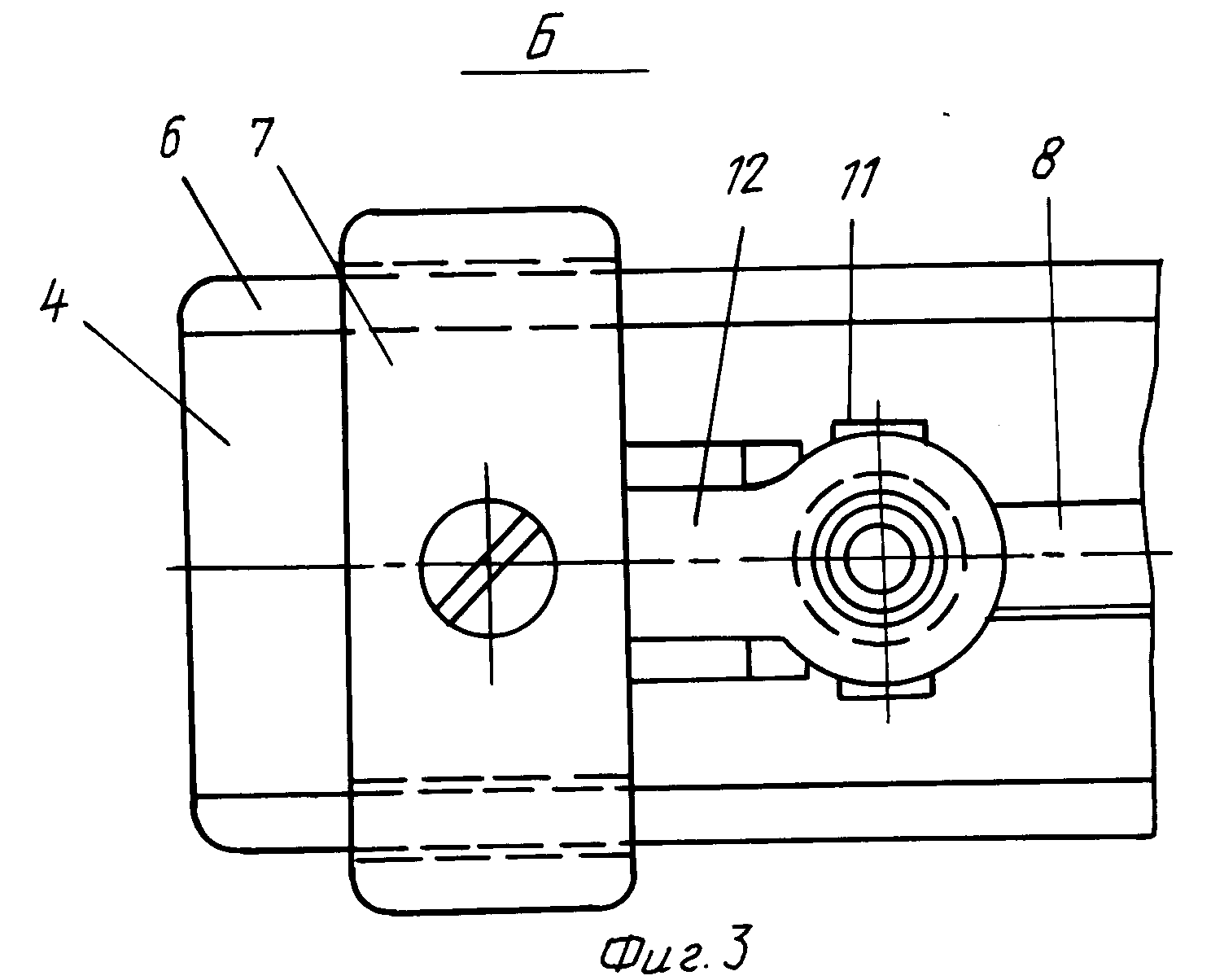
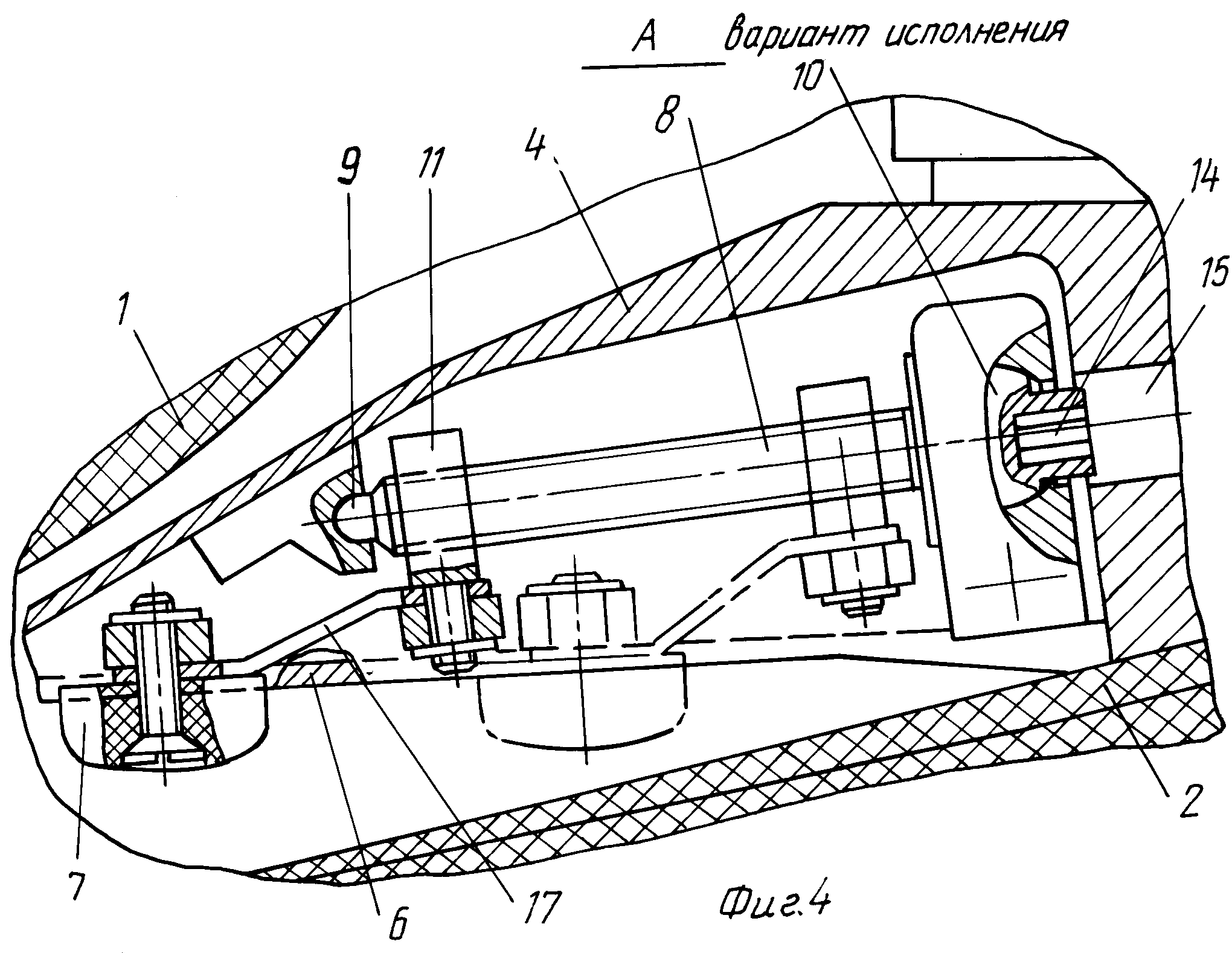
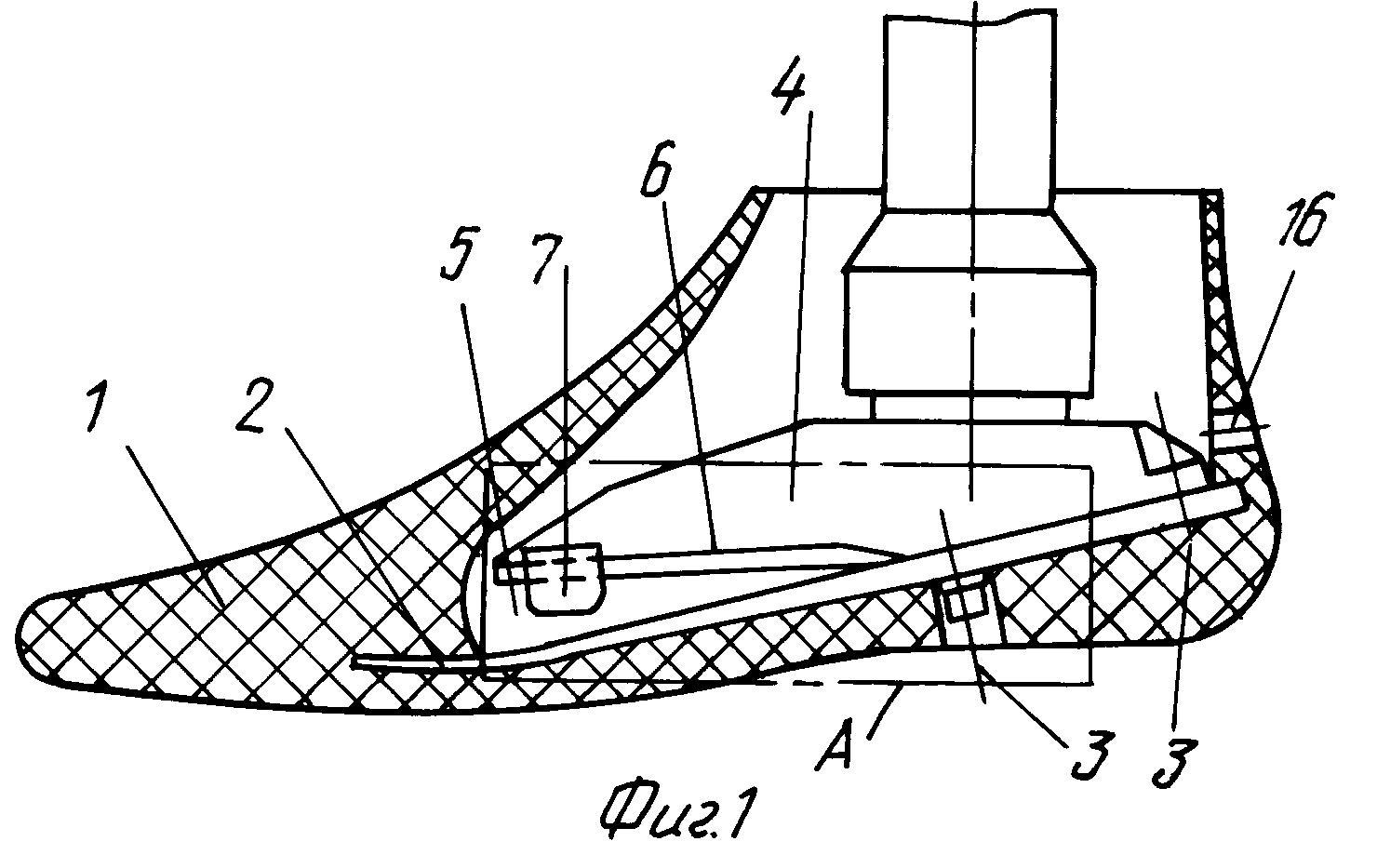
На фиг. 1 изображен общий вид искусственной стопы; на фиг. 2 - вид А по фиг. 1; на фиг. 3 - вид Б по фиг. 3; на фиг. 4 - вариант вида А по фиг. 1.
Искусственная стопа содержит облицовку 1 из микроячеистого полиуретана с заформованным в нее упругим вкладышем 2. К упругому вкладышу 2 посредством болтов 3 крепится корпус 4, передняя часть которого выполнена в виде консоли, образующей с вкладышем 2 клиновой зазор 5. На боковых поверхностях консоли корпуса 4 выполнены направляющие 6, на которые установлена опорная планка 7 с возможностью продольного перемещения в клиновом зазоре 5. В специально выполненной внутренней полости корпуса 4 размещен механизм перемещения опорной планки 7, состоящий из ходового винта 8, который посредством передней 9 и задней 10 опор шарнирно закреплен на корпусе стопы с возможностью вращения относительно своей продольной оси, гайки 11, установленной на винте 8 и тяги 12. Тяга 12 посредством шарниров 13 соединена с гайкой 11 и с опорной планкой 7. На заднем конце ходового винта 8 выполнено гнездо 14 под ключ для обеспечения его вращения. Кроме того, для подхода к гнезду 14 в корпусе 4 и облицовке 1 выполнены сквозные отверстия 15 и 16, соосные с ходовым винтом 8.
Предлагаемая искусственная стопа с механизмом перемещения опорной планки позволяет производить регулировку положения опорной планки, а следовательно и точки переката стопы, в процессе примерки ее в протезе и устанавливать в зависимости от индивидуальных особенностей пациента (вес, вид протеза, степень физической активности) необходимое положение точки переката стопы, не снимая стопу из протеза и не разбирая ее.
Достигается это следующим образом: для перемещения опорной планки 7 вперед или назад по направляющим 6 консоли корпуса 4 необходимо вставить в отверстия 16 и 15 соответственно облицовки 1 стопы и корпуса 4, специальный ключ или отвертку в зависимости от вида гнезда 14 ходового винта 8 и вращать винт относительно шарнирных опор 9, 10 в нужном направлении, при этом гайка 11 начнет перемещаться вдоль ходового винта 8 в требуемом направлении (вперед или назад), увлекая за собой через тягу 12 опорную планку 7. Шарнирное крепление тяги 12 относительно гайки 11 и опорной планки 7 позволяет обеспечить беспрепятственное перемещение последней по направляющим консоли корпуса 4 даже в том случае, когда ось ходового винта 8 и направляющие 6 корпуса 4 не являются параллельными. Для упрощения конструкции вместо тяги, шарнирно соединенной с гайкой и опорной планкой, можно использовать упругую пластину 17, при этом возможные рассогласования в направлениях движений гайки и планки будут компенсироваться за счет изгиба пластинки 17.
При ходьбе опорная планка 7, находясь в клиновом зазоре 5 между корпусом 4 и вкладышем 2 стопы, может испытывать направленные на ее смещение вдоль направляющих консоли усилия, возникающие при изгибе вкладыша 2, но при этом она будет оставаться неподвижной из-за большого передаточного числа, существующего во вращательной паре между гайкой 11 и ходовым винтом 8. Благодаря малому шагу резьбы ходового винта 8 его невозможно заставить вращаться от усилий, передаваемых тягой 12 от опорной планки 7 к гайке 11 в направлении, близком или совпадающим с осью ходового винта 8.
Таким образом, предлагаемая искусственная стопа с механизмом перемещения опорной планки позволяет не только производить подбор и регулировку положения точки переката стопы, но и значительно упростить и облегчить эти операции не требуя снятия стопы из протеза и ее разборки.
Предлагаемая стопа по желанию пользователя может применяться как самостоятельно в любой из разновидностей протезов (голени, бедра и др.), так и в виде технологического устройства для подбора необходимого положения точки переката стопы с последующей ее заменой в протезе на соответственно отрегулированную стопу.
Реферат
Искусственная стопа предназначена для протезирования нижних конечностей и может быть использована для повышения удобства пользования искусственной стопой с регулируемой линией переката за счет устранения необходимости разборки стопы для перестановки опорной планки с одновременным обеспечением непрерывной (бесшаговой) регулировки линии переката стопы. В искусственную стопу введен механизм перемещения опорной планки, выполненный в виде ходового винта, закрепленного внутри корпуса, на шарнирных опорах и соединенного через установленную на нем гайку и тягу с опорной планкой, при этом в корпусе и облицовке выполнены сквозные отверстия, соосные с ходовым винтом. 4 ил.
Комментарии