Способ проведения анализа функционирования искусственной конечности - RU2402995C2
Код документа: RU2402995C2
Чертежи






Описание
Изобретение относится к способу проведения анализа функционирования искусственной конечности у лица, пользующегося ею, причем искусственная конечность выполнена с возможностью регулирования своей основной функции и выполнена по модульному принципу по меньшей мере с одним съемным функциональным элементом для выполнения дополнительной функции.
Искусственные конечности используются в высокоразвитых разработанных формах выполнения. Для особенно важных с точки зрения безопасности пациента протезов нижних конечностей, включающих искусственный коленный сустав, для выполнения функций «ходьбы» и «стояния» используются, например, точные технологии, которые, с одной стороны, обеспечивают надежное стояние, а с другой - процесс движения при ходьбе, максимально приближенный к естественной ходьбе. Для этого, например, необходимо, чтобы с учетом усилия, прилагаемого пациентом, например при движении культи бедра, полностью обеспечить вынос вперед голени, избежав, однако, при этом резкого толчка со стороны элемента голени в упор, ограничивающий разгибательное движение. При этом по мере необходимости очевидно использование прогрессивной амортизации, обеспечивающей желательную функцию амортизации лишь при ее правильном дозировании для соответствующего пациента. То же самое относится к началу ходьбы после стояния и к устойчивому стоянию после ходьбы.
Уже известно управление функционированием такого протеза с помощью датчиков, определяющих переход от одной фазы движения при ходьбе в его другую фазу или переход от движения при ходьбе к стоянию и, наоборот, на основании измеренных усилий, ускорений, моментов и подобного и осуществляющих регулировки протеза для очередной рабочей фазы. Примером такого протеза является протез ноги, разработанный и распространяемый заявителем под названием С-Leg. Однако даже такой высокотехнологичный протез нуждается в регулировке для оптимизации функций протеза под соответствующего пациента. Такая регулировка может проводиться с учетом субъективных впечатлений пациента от использования протеза. Однако недостаток заключается в том, что количественная оценка впечатлений вряд ли является возможной. Поэтому оптимизация регулировок протеза для их приближения к оптимизированным значениям должна осуществляться методом проб и ошибок.
Известны устройства, обеспечивающие пациенту, пользующемуся протезом, объективную форму анализа стояния и ходьбы. Для этого необходимы затратные и потому дорогие измерительные системы, которые могут позволить себе лишь немногие лаборатории, например реабилитационные центры. Для стандартной подгонки протеза ортопедом такие измерительные системы являются недоступными, так что стандартная подгонка без помощи таких измерительных систем, по существу, производится на основе субъективных впечатлений пациента.
В основу изобретения положена задача обеспечения анализа функций искусственной конечности без дорогостоящей аппаратуры.
Для решения этой задачи согласно изобретению способ вышеупомянутого типа характеризуется тем, что вместо съемного функционального элемента встраивается сенсорное устройство, соответствующее по основным габаритам устанавливаемому функциональному элементу, при этом сенсорное устройство измеряет усилия, ускорения и/или моменты во время использования искусственной конечности, используемые для оптимизации регулировки основной функции искусственной конечности, при этом сенсорное устройство заменяют функциональным элементом при сохранении оптимизированной регулировки.
Таким образом, данное изобретение обеспечивает проведение измерений на полностью работоспособном протезе, предусмотренном для пациента и подходящем ему. Поэтому протез со встроенным сенсорным устройством для анализа измеренных значений может использоваться пациентом сколь угодно долго, чтобы можно было установить, требуется ли дальнейшая оптимизация регулировок протеза и не появляются ли, например, в результате длительного использования протеза изменения походки пациента, то есть не нужны ли другие регулировки протеза.
В этом состоит существенное отличие от специальных измерительных протезов, используемых для получения первых результатов измерения у пациента при изготовлении протеза, подходящего ему. Такой измерительный протез не приспособлен для индивидуального использования пациентом и поэтому не может служить для получения отправных данных для конкретного пациента. В противоположность этому согласно изобретению используется протез, изготовленный для пациента, целиком подходящий ему и полностью работоспособный по своей основной функции.
Благодаря компактности устройства и надежности получаемых данных сенсорное устройство по изобретению позволяет демонтировать функциональный элемент протеза, предусмотренный для выполнения дополнительной функции, и заменять его сенсорным устройством, укладывающимся в установочные габариты. Само собой разумеется, что сенсорное устройство при этом должно быть выполнено с таким расчетом, чтобы оно при измерениях обходилось без относительных движений, заметных при использовании. Поэтому предпочтение отдается исполнению сенсорного устройства с тензорезисторами, пьезоэлементами и подобным, которым для формирования измеряемого сигнала достаточно относительных движений или деформаций в долях миллиметра.
Примером съемного функционального элемента протеза ноги является вращающийся адаптер, устанавливаемый над коленным суставом для обеспечения, в частности, при сидении, вращения голени относительно бедра, благодаря чему облегчается, например, сидячее положение с ногой, закинутой за ногу. Для проведения анализа работы пациент может просто отказаться от этой дополнительной функции, не влияющей на выполнение основной функции протеза ноги, а именно на ходьбу или стояние. Однако само собой разумеется, что при модульном устройстве протеза можно также укоротить участок трубки, составляющий голень и бедро, ровно настолько, насколько потребуется для установления сенсорного устройства. Потом при демонтаже сенсорного устройства к укороченному участку трубки можно прифланцевать соответствующую надставку или заменить укороченный участок трубки на более длинный.
Функциональный элемент, полученный в результате установки сенсорного устройства, также может быть несущим модульным элементом, например трубчатым модулем. Сменный модульный элемент не является определяющим для выполнения основной функции, как это было бы, например, в случае коленного сустава или элементов искусственной стопы, определяющих ее перекат с пятки на носок. Таким образом, сенсорное устройство может выполняться также в комбинации с оставшимся модульным элементом, причем вес и распределение веса, в основном, должны быть такими же, как у замененного модульного элемента. Примером такого сенсорного устройства является измерительный датчик с остальной частью трубки голени, с помощью которых заменяется трубка голени протеза ноги.
Хотя в вышеприведенном описании, в первую очередь, речь идет о нижней конечности, абсолютно ясно, что изобретение относится также к использованию протезов верхних конечностей, то есть, рук, кистей рук и плеч.
Во всех случаях благодаря самому сенсорному устройству, а также дополнительным датчикам, установленным в протезе, получают дополнительные результаты измерений, как-то: величины поворота, углов, изменения углов и подобного.
Далее изобретение поясняется более подробно на примере выполнения со ссылкой на чертежи, а также на основе описания сенсорного устройства, особенного удобного для осуществления изобретения.
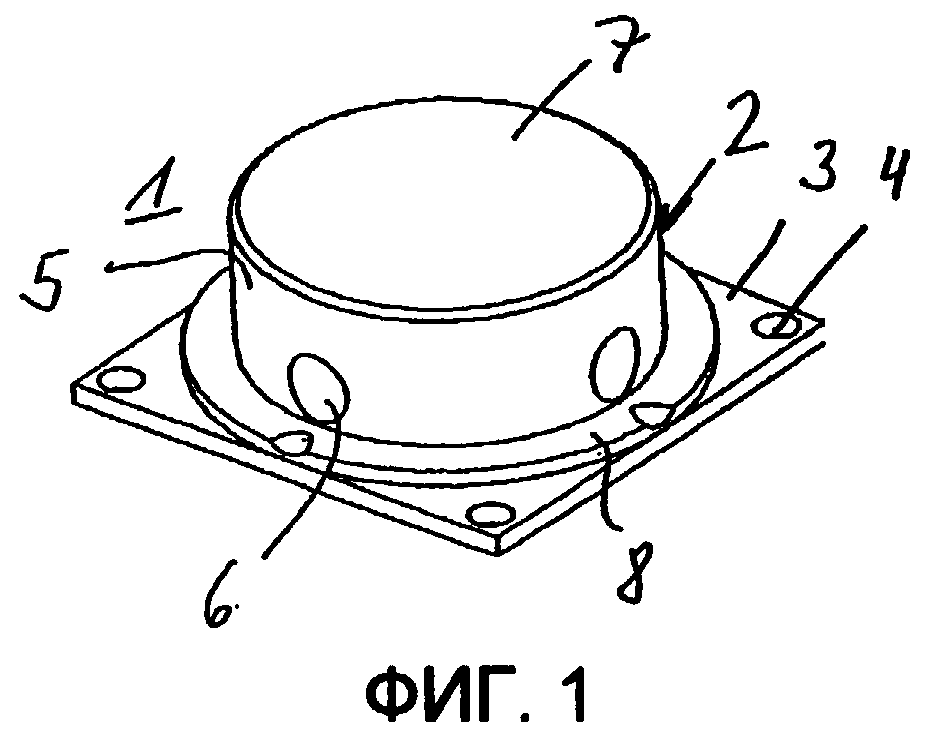
Фиг.1 изображает вид сбоку первого элемента сенсорного устройства, в изометрии;
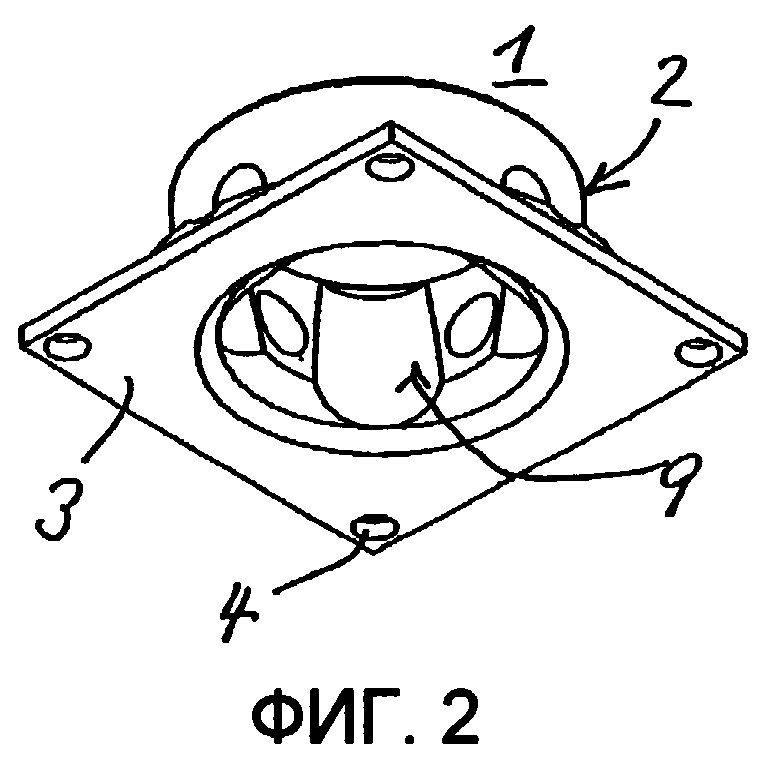
фиг.2 - вид первого элемента на фиг.1 снизу под углом, в изометрии;
фиг.3 - вид сбоку второго элемента сенсорного устройства, в изометрии;
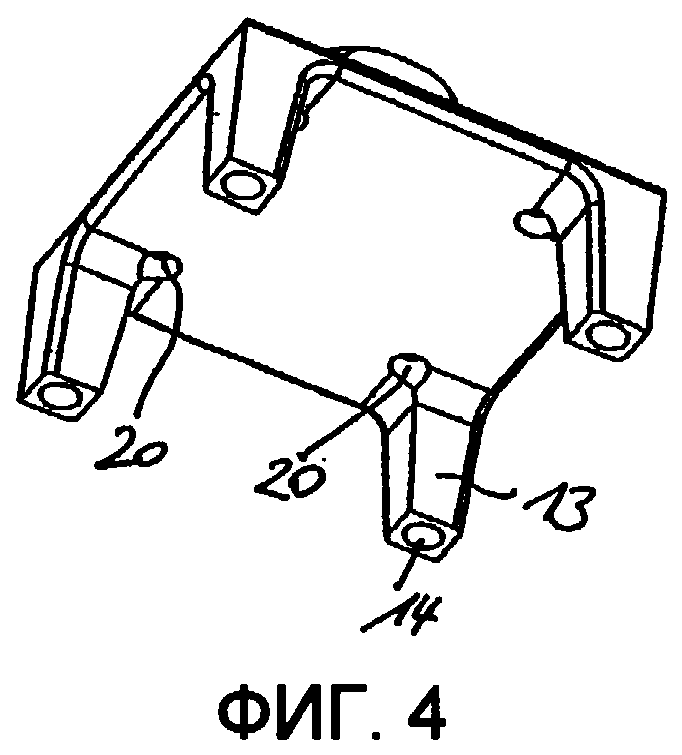
фиг.4 - вид второго элемента на фиг.3 снизу под углом, в изометрии;
фиг.5 - вид сбоку сенсорного устройства, составленного из обоих элементов, в изометрии;
фиг.6 - вид сенсорного устройства на фиг.5 снизу под углом, в изометрии;
фиг.7 - схематически сечение сенсорного устройства при аксиальной нагрузке (в направлении оси z) со схематическим изображением линейных областей сжатия на втором фланце;
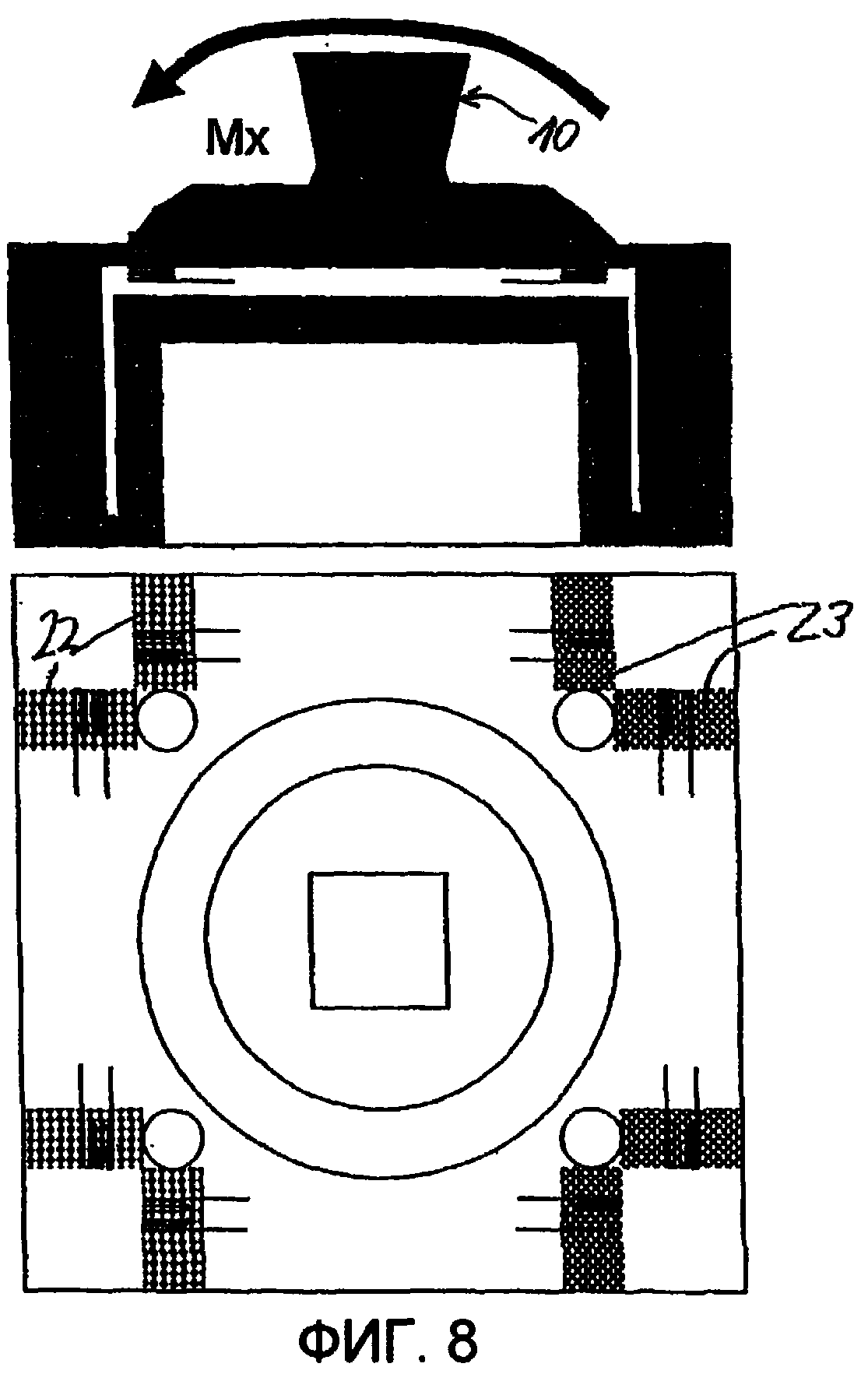
фиг.8 - момент вращения вокруг горизонтальной оси (оси x) на фиг.7;
фиг.9 - схематическое изображение по фиг.7 при боковом воздействии;
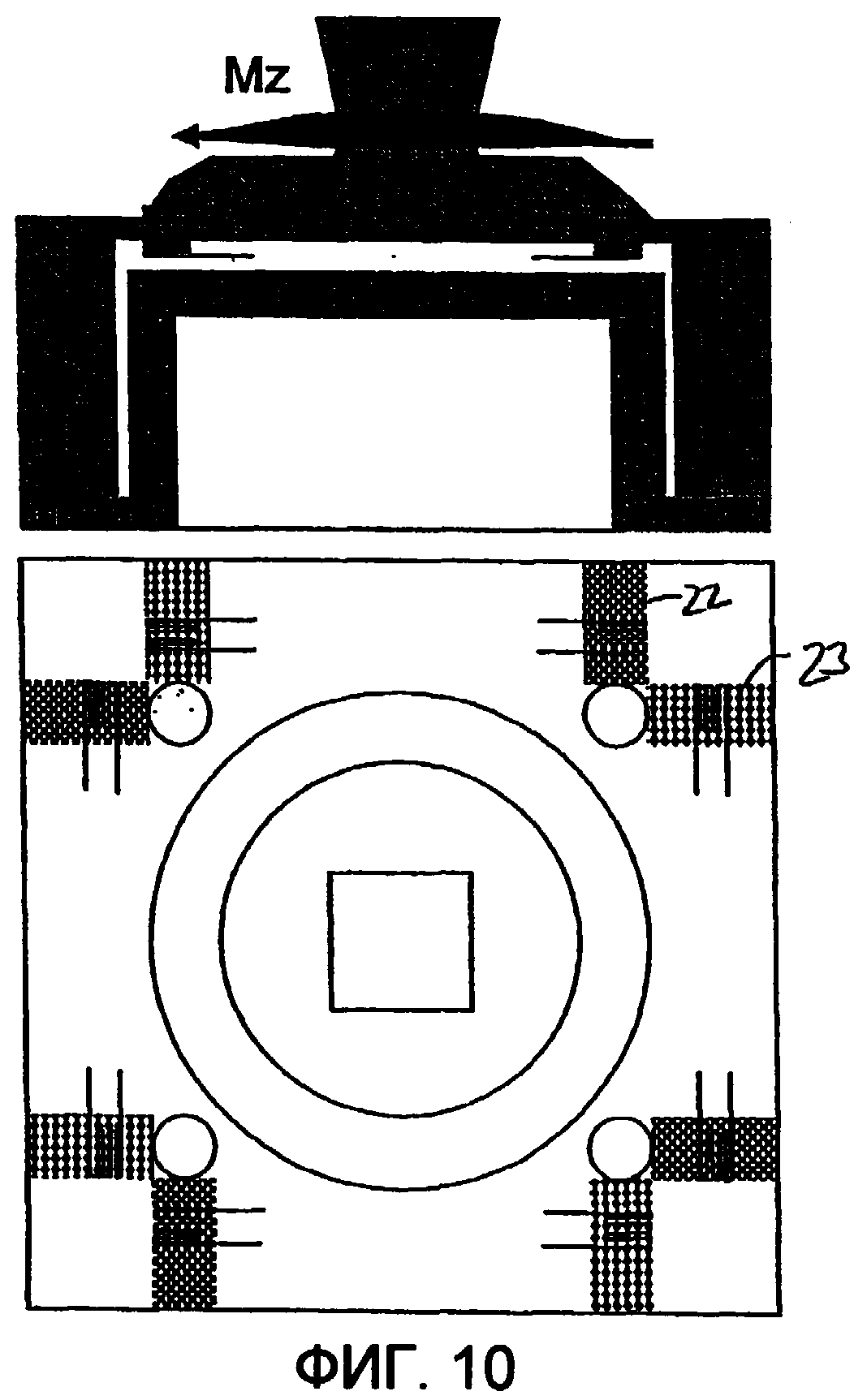
фиг.10 - схематически момент вращения вокруг вертикальной оси (оси z) на фиг.7;
фиг.11 - вид сбоку протеза ноги с вращающимся адаптером;
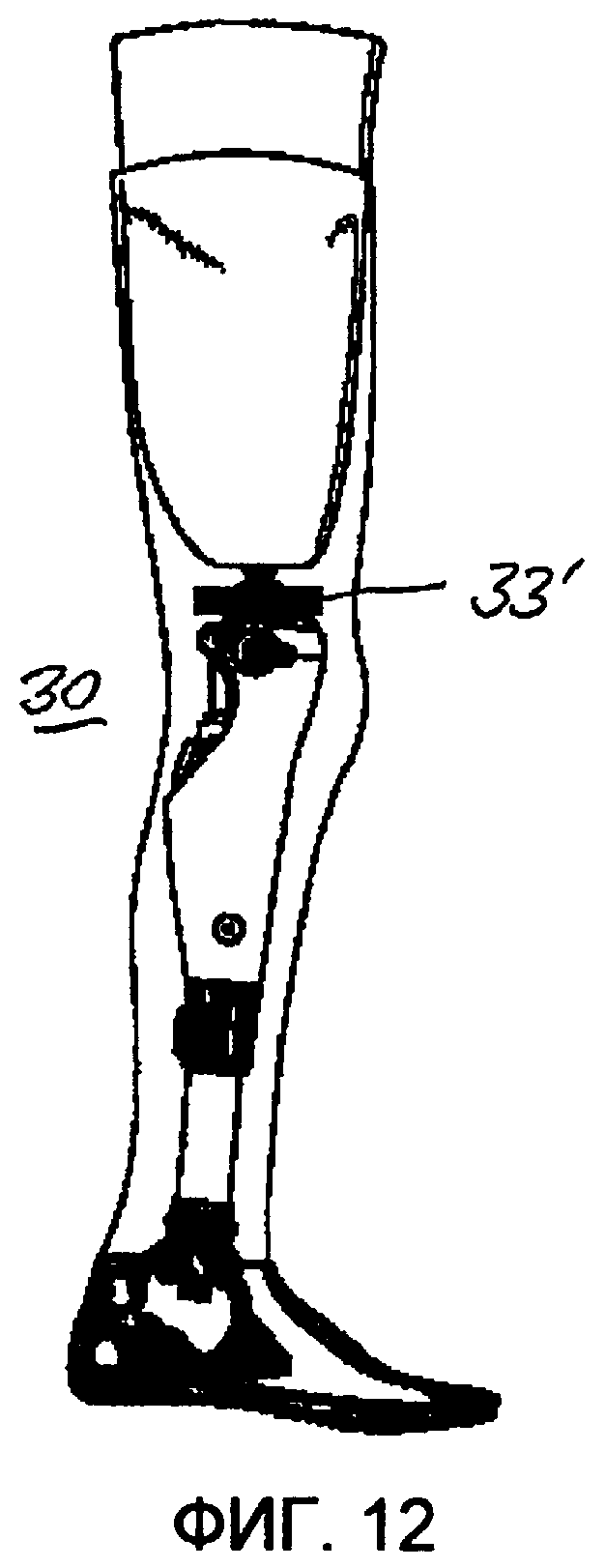
фиг.12 - вид сбоку на фиг.11, в котором вращающийся адаптер заменен сенсорным устройством в соответствии с фиг.1-10.
Фиг.1-6 показывают пример выполнения сенсорного устройства согласно изобретению. Последнее состоит из первого элемента 1, собранного из цилиндрического присоединительного элемента 2 в виде шляпки и примыкающего к нему квадратного фланца 3. Квадратный фланец 3 имеет по углам сквозные отверстия 4 для крепежных болтов (не показаны).
Присоединительный элемент 2 в виде шляпки выполнен с цилиндрической боковой поверхностью 5, в которой со смещением на угол 90° по дуге выполнены резьбовые отверстия 6. Присоединительный элемент 2 в виде шляпки с верхней стороны содержит дно 7 в виде кругового цилиндра, а с нижней стороны - фланец 8 в виде круглого кольца, соединенного в одно целое с прямоугольным фланцем 3 и усиливающим его.
На фиг.2 показано, что присоединительный элемент 2 в виде шляпки имеет прямоугольную приемную полость 9, служащую для приема юстировочного адаптера, имеющего четыре юстировочные поверхности, расположенные под углом, в которые упираются юстировочные винты, проходящие сквозь резьбовые отверстия 6.
Такой юстировочный адаптер 10 выполнен на втором элементе 11 сенсорного устройства. Второй элемент 11 имеет второй квадратный фланец 12, размеры которого соответствуют размерам первого фланца 3. Оба фланца 3, 12 соединяются друг с другом посредством стоек 13, выполненных заодно со вторым элементом 11, которые по углам второго фланца 12 простираются вниз, так что они располагаются на первом фланце 3 радиально снаружи присоединительного элемента 2 в виде шляпки. Стойки 13 с нижней стороны снабжены, соответственно, глухими резьбовыми отверстиями, которые могут быть соосными сквозным отверстиям 4 первого фланца.
Из фиг.3 и 4 видно, что стойки 13 имеют прямоугольное сечение и в направлении своих нижних свободных концов, т.е. в направлении вниз сужаются за счет скоса 16, обращенного в сторону промежутка 15 между двумя стойками 13.
Юстировочный адаптер 10 располагается на верхней стороне 17 второго фланца 12, противоположной стойкам 13. Он выполнен известным способом в виде перевернутой усеченной пирамиды и потому имеет четыре плоские юстировочные поверхности 18, расположенные под углом, которые в целях юстировки могут взаимодействовать с юстировочными винтами. Юстировочный адаптер 10 переходит в основание 19 с увеличенным диаметром, которое со своей выпуклой поверхностью образует переход ко второму квадратному фланцу 12.
Юстировочный адаптер 10 образует второй присоединительный элемент сенсорного устройства. Между этим вторым присоединительным элементом 10 и стойками 13, расположенными по углам второго фланца 12, т.е. по диагоналям этого фланца 12, находятся углубления 20 в виде сквозных отверстий, через которые может оказываться воздействие на описанное ниже более подробно формирование областей сжатия или растяжения.
На фиг.5 и 6 изображено сенсорное устройство в собранном виде (но без крепежных винтов), состоящее из обеих деталей 1, 11. Очевидно, что между приемной полостью 9 первого присоединительного элемента 2 и вторым юстировочным адаптером 10, образующим второй присоединительный элемент, необходима незначительная монтажная высота порядка 2-3 см.
На фиг.7-10 схематически показаны вертикальные сечения сенсорного устройства согласно фиг.1-6 со схематическим изображением тензорезисторов 21 в качестве чувствительных элементов, наклеенных на обе поверхности фланца 12.
Виды сверху, показанные на фиг.7-10 внизу, поясняют позиционирование тензорезисторов 21 в том смысле, что они благодаря наличию областей 22 и 23 сжатия или растяжения, соответственно, изображенных в виде линий, изменяют свое положение, так что происходит изменение сопротивления.
Фиг.7 поясняет падение силового воздействия в направлении оси z, т.е., в аксиальном направлении скелета трубчатого протеза для голени. При этом тензорезисторы 21, расположенные на верхней стороне 17 второго фланца 12, находятся в областях сжатия 22, протянувшихся в виде линий, параллельных кромкам второго фланца 12, от сквозных отверстий 20 до соседних кромок, соответственно. В результате соответственно сориентированные тензорезисторы 21 изменяют величину своего сопротивления в направлении сжатия.
Согласно фиг.8 на юстировочный адаптер 10 действует момент вращения вокруг оси, перпендикулярной плоскости чертежа (в направлении оси x). Момент вращения приводит тензорезисторы 22, расположенные на верхней стороне 17 со стороны, в которую направлен момент вращения (см. нарисованную стрелку Mx на фиг.8), к сжатию, в то время как с противоположной стороны он приводит их к образованию областей растяжения 23.
На фиг.9 показана боковая сила, действующая на юстировочный адаптер 10 в плоскости чертежа (в направлении оси y), вследствие чего создаются только те области растяжения 23 и сжатия 22, которые расположены перпендикулярно действующей силе, в то время как остальные тензорезисторы 21 на верхней стороне 17 второго фланца 12 остаются без измеряемого сигнала.
При изображенном на фиг.10 моменте Mz вращения, действующем в направлении оси z, у каждого углубления 20 появляются область 23 сжатия и область 22 растяжения, причем если смотреть в направлении момента Mz вращения, то область 23 сжатия опережает область 22 растяжения на 90°.
Из приведенных примеров ясно, что с помощью тензорезисторов 21 в качестве чувствительных элементов могут обнаруживаться однозначно различные действующие силы и моменты.
Тензорезисторы 21 с нижней стороны второго фланца 12 подают сигналы, являющиеся дополнительными к сигналам тензорезисторов 21 с верхней стороны 17 второго фланца 12, так что при соответствующем сложении они могут способствовать усилению измеряемого сигнала.
На фиг.11 изображен известный протез 30 с приемной воронкой 31 для культи бедра. В приемную воронку 31 вставлена приятная для кожи прокладка 32 (liner), которая устанавливает безболезненный контакт с культей бедра.
К нижнему концу приемной воронки 31 посредством обычной юстировочной пирамиды подсоединен вращающийся адаптер 33. Соединение вращающегося адаптера 33 с элементом 34 голени также осуществляется с помощью юстировочной пирамиды.
Элемент 34 голени выполнен в качестве элемента протеза с компьютерным управлением, каким он известен под названием «C-Leg» общества с ограниченной ответственностью «Otto Bock Health Care GmbH». Элемент 34 голени содержит полицентричный коленный сустав 35, выполненный в виде, известном как четырехсуставная цепь. К элементу 34 примыкает снизу модульная трубка 36, устанавливающая связь с искусственной бессуставной стопой, возможное строение которой также известно, и на котором здесь нет необходимости останавливаться более подробно. Как искусственная стопа 37, так и протез ноги, снабжены косметическим покрытием.
Основная функция протеза 30 заключается в обеспечении инвалиду, пользующемуся протезом, возможно более естественной походки и устойчивого стояния, а также удобного усаживания. Вращающийся адаптер 33 во время выполнения основной функции протеза 30 заблокирован и может быть разблокирован, если элемент 34 голени не испытывает никакой нагрузки. С помощью вращающегося адаптера 33 голень протеза 30 может вращаться относительно бедра, в частности, когда пользователь протеза 30 сидит.
Для подгонки протеза 30, а при необходимости и на более поздней стадии испытания протеза 30, вращающийся адаптер 33 может быть заменен сенсорным устройством, поясняемым на фиг.1-10 и обозначенным здесь позицией 33′. В результате замены вращающегося адаптера 33 сенсорным устройством 33′ основная функция протеза остается неизменной, если конструктивные размеры сенсорного устройства 33′ соответствуют конструктивным размерам вращающегося адаптера 33. Исчезает только дополнительная функция вращения голени относительно бедра, отчего, однако, основная функция протеза 30, а именно обеспечение походки, стояния и усаживания, не нарушается. Поэтому данные, необходимые для анализа функционирования протеза 33, могут быть получены на индивидуально подобранном и полностью работоспособном протезе 30 с помощью сенсорного устройства 33′. При этом сенсорное устройство 33′ для первой примерки протеза, то есть, для кратковременного использования, пригодно так же, как и для долговременного испытания движения пациента с помощью протеза 30, специально подобранного и отрегулированного для него.
Реферат
Изобретение относится к области медицинской техники, а именно к протезированию, в частности к способу проведения анализа функционирования искусственной конечности у лица, пользующегося ею, причем искусственная конечность выполнена с возможностью регулирования своей основной функции и выполнена по модульному принципу, по меньшей мере, с одним съемным функциональным элементом для выполнения дополнительной функции. Способ проведения анализа функционирования искусственной конечности у лица, пользующегося ею. Причем искусственная конечность выполнена по модульному принципу, с возможностью регулирования своей основной функции и снабжена, по меньшей мере, одним съемным функциональным элементом, в частности для выполнения дополнительной функции. Вместо съемного функционального элемента устанавливают сенсорное устройство, соответствующее по основным габаритам функциональному элементу. Посредством сенсорного устройства обеспечивают измерения усилия, ускорения и/или моментов во время использования искусственной конечности и осуществляют оптимизацию регулировок основной функции искусственной конечности. После чего сенсорное устройство заменяют функциональным элементом при сохранении оптимизированных регулировок. Изобретение обеспечивает возможность проведения функционального анализа искусственной конечности без комплекса дорогостоящей измерительной аппаратуры. 2 з.п. ф-лы, 12 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство для подбора параметров протеза нижней конечности
Комментарии