Генерирование модифицированного трехмерного изображения для объекта, содержащего следы от применения - RU2557458C2
Код документа: RU2557458C2
Чертежи








Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к области генерирования изображений.
Уровень техники
В области судебной баллистики микроскопические следы от применения, присутствующие на различных типах объектов, сравниваются, чтобы найти совпадение следов от применения и связать друг с другом такие объекты как пули, и, в конечном счете, связать эти объекты с другим объектом, таким как выявленное огнестрельное оружие. Однако сравнение следов от применения может быть весьма затруднительно, в особенности когда на пуле присутствует только малое число следов от применения, либо когда пули имеют различные формы.
Поэтому существует необходимость в усовершенствованных способе и системе для сравнения баллистических объектов.
Раскрытие изобретения
Согласно первому основному аспекту предложен способ генерирования трехмерного представления объекта, содержащий этапы, на которых: получают трехмерные топографические данные, представляющие по меньшей мере один участок объекта, имеющего макроскопическую форму и микроскопические признаки; разделяют трехмерные топографические данные на микроскопические данные, представляющие микроскопические признаки, и на макроскопические данные, представляющие макроскопическую форму; независимо масштабируют микроскопические данные или макроскопические данные для выделения микроскопических признаков по отношению к макроскопической форме, получая тем самым масштабированные топографические данные; и генерируют трехмерное изображение с помощью масштабированных топографических данных, получая тем самым модифицированное представление с выделенными микроскопическими признаками для указанного по меньшей мере одного участка объекта.
Согласно второму основному аспекту предложена система для генерирования трехмерного представления объекта, содержащая: процессор; память для хранения исходных трехмерных топографических данных, представляющих по меньшей мере один участок объекта, имеющего макроскопическую форму и микроскопические признаки; и приложение, связанное с процессором и с памятью, при этом приложение при его исполнении в процессоре выполняет этапы, на которых: разделяют трехмерные топографические данные на микроскопические данные, представляющие микроскопические признаки, и на макроскопические данные, представляющие макроскопическую форму; независимо масштабируют микроскопические данные или макроскопические данные для выделения микроскопических признаков по отношению к макроскопической форме, получая тем самым масштабированные топографические данные; и генерируют трехмерное изображение с помощью масштабированных топографических данных, получая тем самым модифицированное представление с выделенными микроскопическими признаками для указанного по меньшей мере одного участка объекта.
Согласно третьему основному аспекту предложен программный продукт, реализованный на машиночитаемом носителе и содержащий команды для генерирования трехмерного представления объекта, содержащий: разделяющий модуль, выполненный с возможностью разделения трехмерных топографических данных, представляющих по меньшей мере один участок объекта, имеющего макроскопическую форму и микроскопические признаки, на микроскопические данные, представляющие указанные микроскопические признаки, и на макроскопические данные, представляющие указанную макроскопическую форму; выделяющий модуль, выполненный с возможностью независимо масштабировать микроскопические данные или макроскопические данные для выделения микроскопических признаков по отношению к макроскопической форме, получая тем самым масштабированные топографические данные; и генератор изображения, выполненный с возможностью генерировать трехмерное изображение с помощью масштабированных топографических данных, получая тем самым модифицированное представление с выделенными микроскопическими признаками для указанного по меньшей мере одного участка объекта.
Термин «объект» относится к любому объекту, содержащему следы от применения которые можно использовать в качестве баллистических доказательств (ВРОЕ). Примеры объекта включают в себя пулю или часть пули, ствол или часть ствола и тому подобное. Хотя в описании используется термин «пули», это сделано в иллюстративных целях и не должно истолковываться ограничивающим образом.
Выражение «трехмерные топографические данные» относится к математическому представлению трехмерной поверхности физического объекта как совокупность точек, определяемых трехмерными координатами (x, y, z). Трехмерные топографические данные представляют собой результат измерений в выбранных местоположениях на поверхности физического объекта подходящим трехмерным датчиком. Специализированное программное обеспечение может соединять этот набор точек геометрическими структурами (треугольниками, многогранниками, криволинейными поверхностями), которые заполняют пустое пространство между этими точками, чтобы генерировать непрерывную поверхность и отображать реалистическое представление данной поверхности, воспринятой датчиком.
Краткое описание чертежей
Другие признаки и преимущества настоящего изобретения прояснятся из нижеследующего подробного описания, взятого вместе с приложенными чертежами.
Фиг.1 иллюстрирует две примерных первоначальных пули, имеющих каждая две представляющих интерес области.
Фиг.2 иллюстрирует размещение примерных пуль под микроскопом сравнения.
Фиг.3 иллюстрирует примерное изображение неровностей для части пули.
Фиг.4 является изображением, представляющим примерную топографию пули, генерируемую виртуальным микроскопом сравнения.
Фиг.5 является блок-схемой алгоритма для способа генерирования модифицированного представления пули согласно одному варианту осуществления.
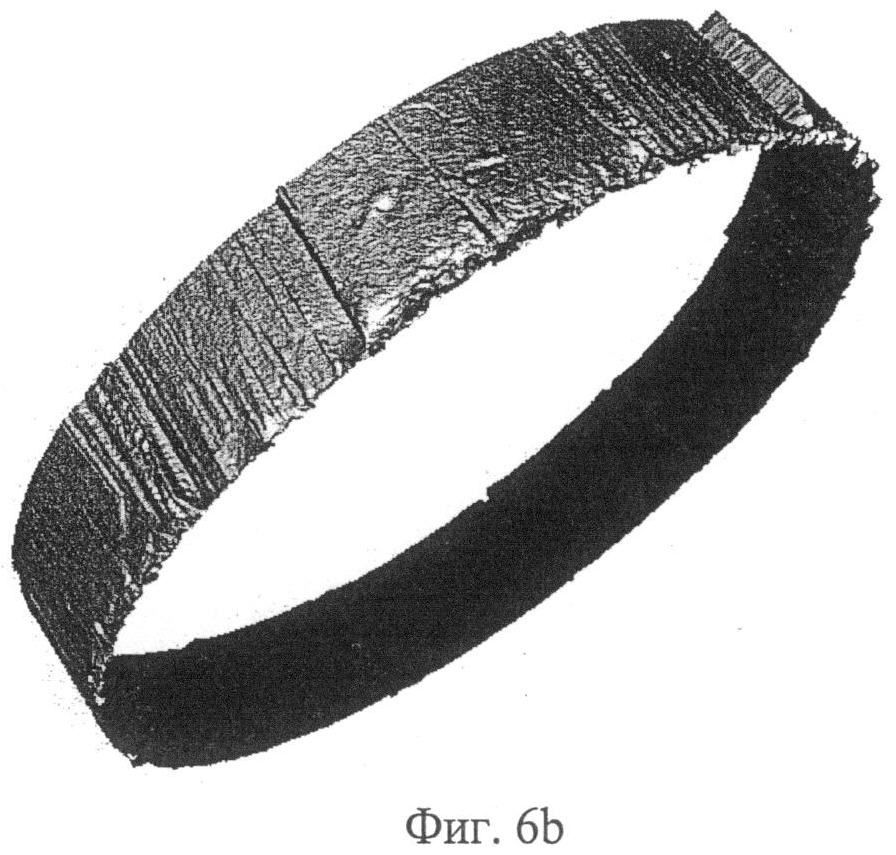
Фиг.6а иллюстрирует трехмерную топографию пули согласно одному варианту осуществления.
Фиг.6b иллюстрирует трехмерную топографию пули по фиг.6а, снабженную увеличенными микроскопическими признаками, согласно одному варианту осуществления.
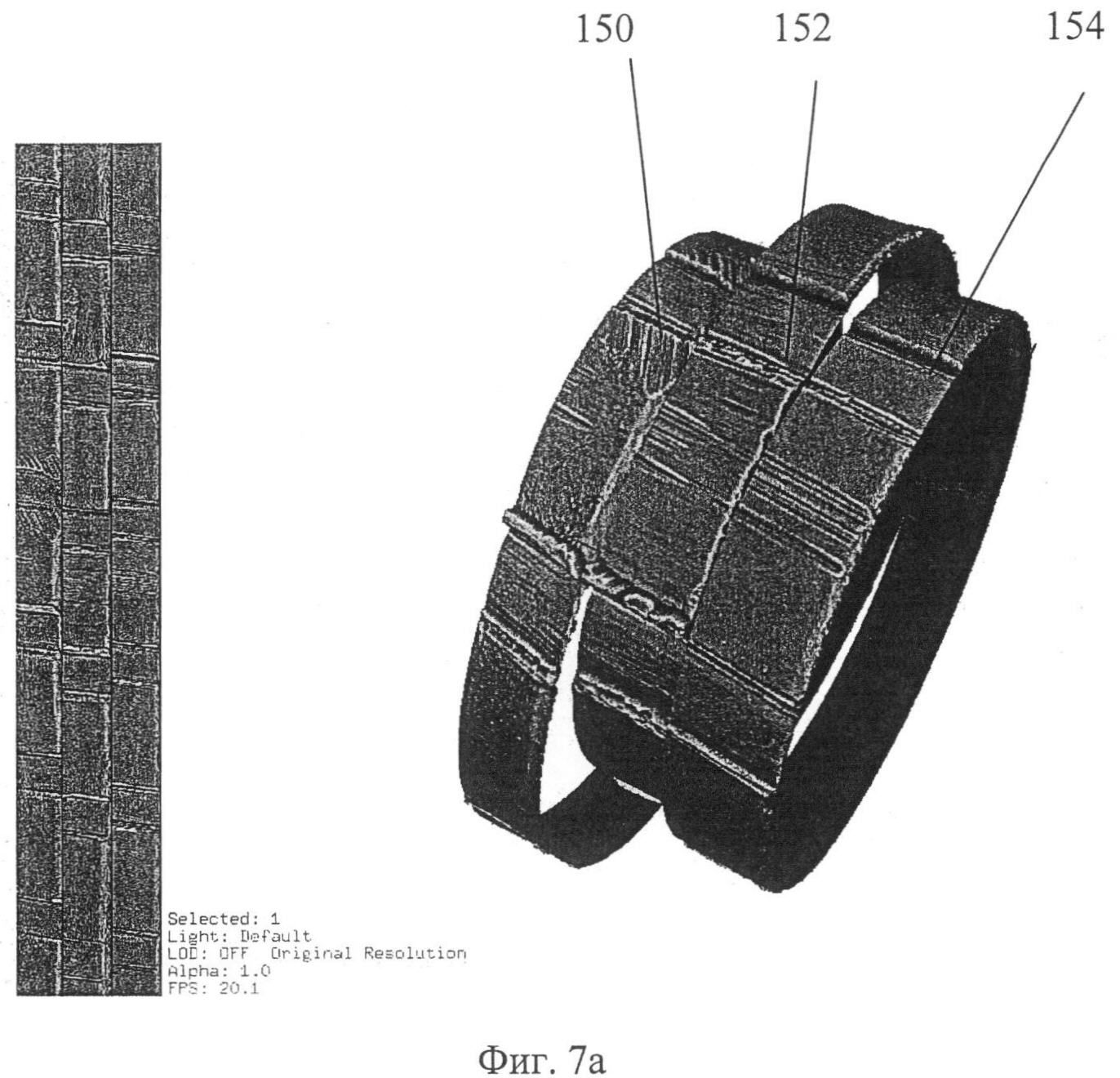
Фиг.7а иллюстрирует две деформированные пули и первоначальную пулю, имеющие каждая увеличенные микроскопические признаки, согласно одному варианту осуществления.
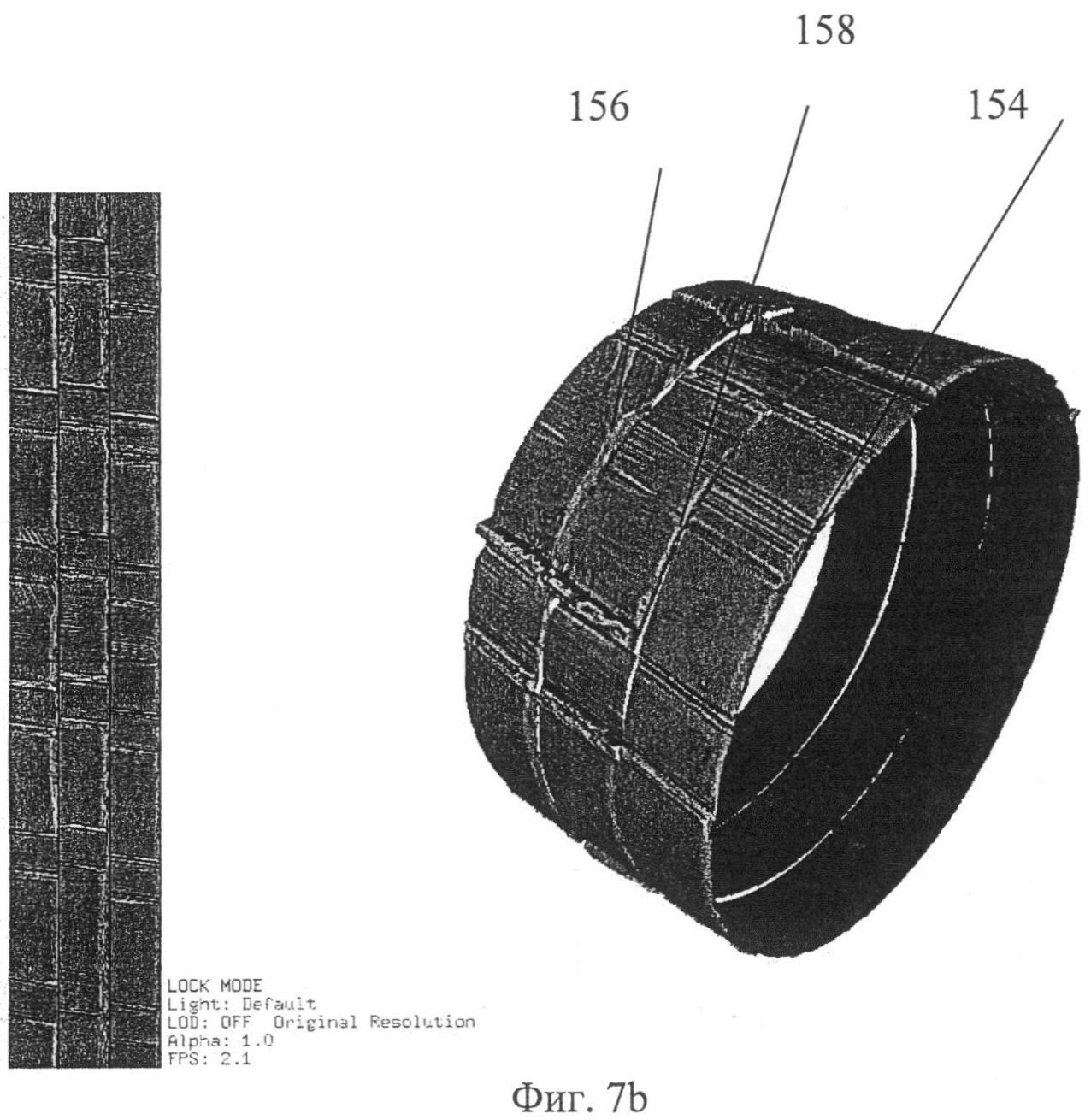
Фиг.7b иллюстрирует две деформированные пули по фиг.7а, форма которых модифицирована для соответствия форме первоначальной пули по фиг.7а согласно одному варианту осуществления.
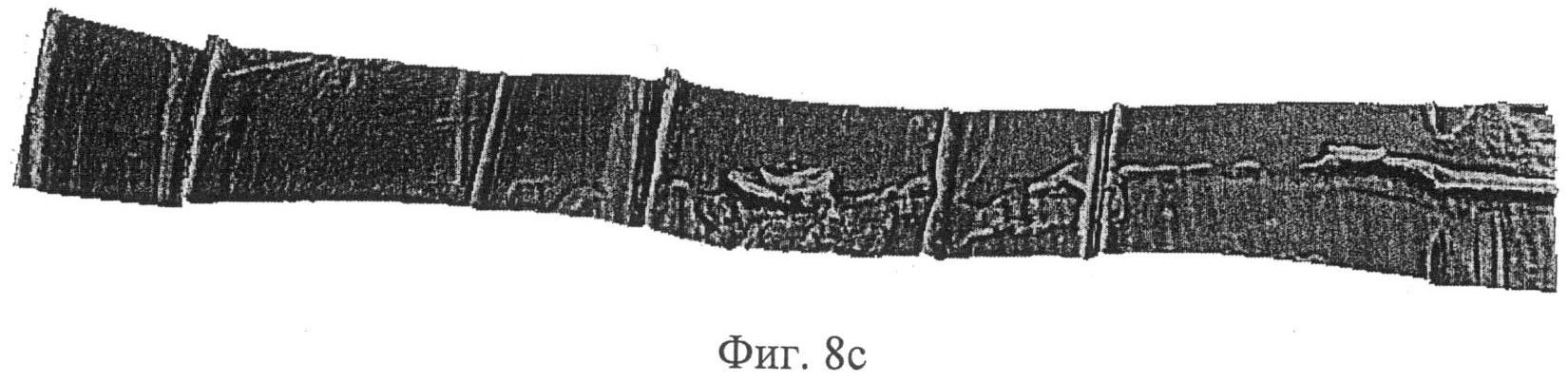
Фиг.8а, 8b и 8с иллюстрируют различные виды методов просмотра: отображение исходных трехмерных данных (8а), наложенный рельеф с двумерным изображением (8b) и наложенный рельеф с изображением неровностей (8с), согласно одному варианту осуществления.
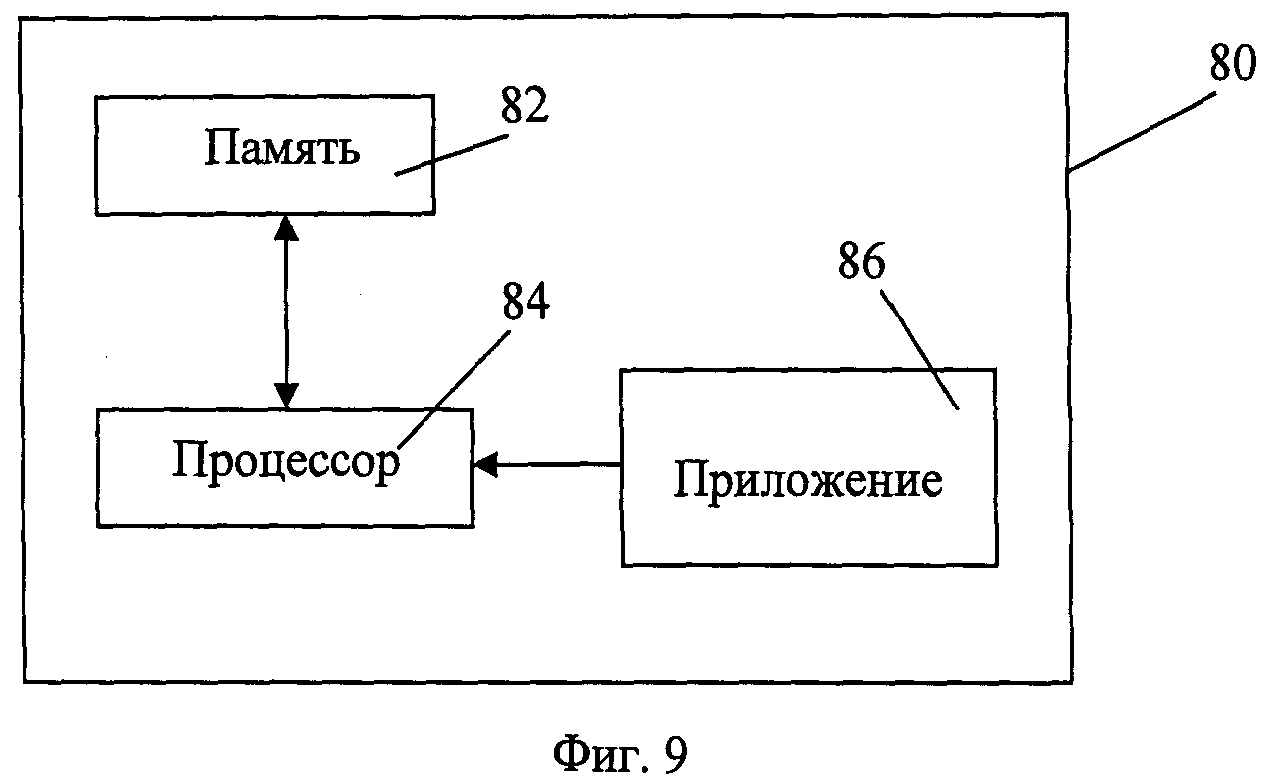
Фиг.9 иллюстрирует компьютерное устройство, содержащее приложение, связанное с памятью и процессором, для генерирования модифицированного представления объекта согласно одному варианту осуществления.
Фиг.10 иллюстрирует примерный вариант осуществления приложения по фиг.9. Следует отметить, что на всех приложенных чертежах одинаковые признаки отмечены одинаковыми ссылочными позициями.
Подробное описание
Визуальное сравнение микроскопических следов от применения, присутствующих на двух пулях, под микроскопом сравнения может быть в значительной степени затруднено, в особенности когда на пулях имеется лишь малое количество следов. В данном случае число совпадающих линий на любой единичной области, представляющей интерес, может быть недостаточным, чтобы установить, что пара пуль является «неопровержимой парой», т.е. парой пуль, выстреленных из одного и того же огнестрельного оружия. Тогда баллистик должен рассмотреть группы совпадающих линий по нескольким представляющим интерес областям.
Эта операция может быть затруднительна вследствие ограничений микроскопа сравнения. В некоторых случаях пули могут иметь круглое поперечное сечение, т.е. первоначальную форму, и ось симметрии каждой пули может совпадать с осью вращения при размещении в микроскопе сравнения. В данном случае эксперт может сравнивать пули, вращая вручную каждую пулю вокруг своей соответствующей оси вращения. Однако в других случаях ось симметрии и ось вращения для одной пули могут не совпадать. Баллистик должен тогда использовать несколько ручных операций, содержащих вращение пуль, перенос пуль и изменение положения и интенсивности источников света, чтобы сравнить эти две пули. Эти операции практически затруднительны для пуль с очень малыми размерами следов.
Фиг.1 иллюстрирует две первоначальных пули 10 и 10', имеющие каждая две представляющих интерес области 12, 14 и 12', 14', соответственно, т.е. две области, содержащие следы от применения, пригодные для визуального анализа. В этом примере каждая представляющая интерес область 12, 14, 12' и 14' содержит лишь малое количество следов.
Эксперт, рассматривающий пули 10 и 10' под микроскопом сравнения, может видеть только часть каждой пули 10 и 10', которая находится в поле зрения микроскопа. В некоторых случаях можно найти и выровнять одинаковые следы, которые видны на обеих пулях 10 и 10'. Однако эксперт может одновременно сравнивать лишь одну представляющую интерес область вследствие ограниченного поля зрения микроскопа. В примере, проиллюстрированном на фиг.1, число совпадающих следов в каждой представляющей интерес области недостаточно, чтобы установить, что пули 10 и 10' составляют неопровержимую пару. Эксперт должен тогда анализировать другие представляющие интерес области на пулях 10 и 10'. При поиске других выровненных и одинаковых следов затруднительно манипулировать обеими пулями 10 и 10', сохраняя выровненными ранее совпадающие линии, поскольку эти последние линии уже не видны в поле зрения микроскопа.
Фиг.2 иллюстрирует размещение пуль под микроскопом 20 сравнения. Для иллюстративных целей пули показаны цилиндрическими с круглым поперечным сечением. Каждая пуля установлена на отличном вращающемся столике микроскопа сравнения. Ось 22 вращения микроскопа представлена горизонтальной линией через пули. Пересечение оси симметрии каждой пули с поверхностью этой пули представлено как «X».
Пули 24 и 26 представляют идеальную ситуацию. Они имеют первоначальную форму и практически один и тот же диаметр. Прямоугольники 28 и 30 представляют области в поле зрения микроскопа для анализа. Стрелки 32 и 34, которые представляют местные векторы, нормальные к топографии в прямоугольниках 28 и 30, вертикальны. Области 28 и 30 на обеих пулях можно затем сравнивать при оптимальных условиях освещения. Далее, если их нашли на обеих пулях 24 и 26, совпадающие линии остаются выровненными, если к пулям 24 и 26 приложено одно и то же вращение. Затем, если на других областях пуль 24 и 26 найден новый набор совпадающих и выровненных следов, можно предположить, что первая группа совпадающих линий все еще выровнена. Эксперт может утверждать, что пули 24 и 25 образуют неопровержимую пару, когда число групп совпадающих и выровненных следов достаточно велико.
Однако пули обычно помещаются вдоль оси вращения микроскопа сравнения не идеально. Эта ситуация представлена пулями 32 и 34. Для пуль 32 и 34 ось симметрии, представленная как «X», не совпадает с осью 22 вращения микроскопа 20. При повороте оси 22 вращения микроскопа 20 нормали 40, 42 сравниваемых областей 36 и 38, соответственно, не остаются параллельными. Эксперт должен тогда изменить положение и интенсивность источника света в процессе работы в дополнение к переносу оси 22 вращения. Совпадающие линии, если они найдены на обеих пулях 32 и 34, не обязательно останутся совмещенными, когда эксперт попытается отыскать новый набор совпадающих следов. Можно предположить, что первая группа совпадающих линий останется совмещенной после нескольких манипуляций с осью 22 вращения микроскопа 20. В результате эффективность процедуры визуального анализа под микроскопом сравнения снижается, в особенности для пуль с малым числом потенциально совпадающих следов в каждой представляющей интерес области.
Эффективность процедуры анализа дополнительно снижается, когда по меньшей мере одна из сравниваемых пуль сильно деформирована. В этом случае операции, подлежащие использованию для обеих пуль, могут значительно различаться. Например, хотя для сравнения первоначальных пуль может быть достаточно поворота, комбинация поворотов и переносов может быть необходима, когда по меньшей мере одна пуля деформирована. Однако анализ деформированных пуль является ключевой операцией для разгадки преступления, поскольку пули, наеденные на месте преступления, обычно деформированы. В противоположность этому, при отстреливании в лабораториях судебной экспертизы со специальным оборудованием, приспособленным для предотвращения деформации, получаются первоначальные или недеформированные пули.
Одна альтернатива визуальному анализу под микроскопом сравнения состоит в генерировании для пули изображений неровностей. Различные представляющие интерес области пули сканируются и для каждой представляющей интерес области генерируется изображение неровностей. Фиг.3 иллюстрирует один пример изображения 70 неровностей. Это изображение 70 неровностей представляет собой удлиненное и плоскостное изображение, представляющее неровности на заснятой области, представляющей интерес. Цветовая шкала или шкала серого пикселов изображения представляет глубину участка пули, представленного пикселом. Например, темная линия 72 представляет след от применения.
Чтобы определить, является ли пара пуль неопровержимой парой, изображения неровностей двух пуль сравниваются. Эксперт может переносить одно изображение неровностей относительно другого, чтобы найти совпадающие линии между двумя изображениями неровностей. Поскольку оно является плоскостным, изображение неровностей не обеспечивает информации о виде или форме области интереса, которую оно представляет. В результате могут сравниваться пули с различными формами. Однако если изображения неровностей используются для нахождения на пуле совпадающих следов от применения, подлежащих подтверждению посредством визуального сравнения с помощью микроскопа сравнения, такого как микроскоп 20, пользователю может быть трудно визуально расположить представляющую интерес область, соответствующую конкретному изображению неровностей на пуле, поскольку форма представляющей интерес области неизвестна при взгляде на изображение неровностей.
Виртуальный микроскоп сравнения приспособлен отображать трехмерную топографию двух пуль, подлежащих сравнению. Отображенное изображение пули представляет трехмерную топографию этой пули. Однако, поскольку глубина следа от применения, как правило, в 1000 раз меньшей, чем обычный размер и (или) радиус кривизны обычных представляющих интерес областей, следы от применения плохо видны, когда отображается вся представляющая интерес область, как показано на фиг.4. Глубина следа от применения, которая, как правило, составляет микрометры, много меньше, чем размер пули, который обычно составляет миллиметры или сантиметры. Поэтому изменение интенсивности шкалы серого в изображении по фиг.4 в наибольшей степени показательно для изменения формы, а не для следов от применения.
За счет приближения представляющей интерес области следы от применения, содержащиеся в представляющей интерес области, становятся более заметны, но информация о форме этой области интереса теряется. Поэтому может быть трудно расположить приближенную область интереса на пуле. Далее, виртуальный микроскоп представляет тот же самый недостаток, что и реальный микроскоп сравнения, т.е. для сравнения пуль с различными формами требуется множество манипуляций.
Фиг.5 иллюстрирует один вариант осуществления способа 100 генерирования модифицированного изображения по меньшей мере одной области пули. Пуля имеет макроскопическую форму и представляет на своей поверхности микроскопические признаки, такие как микроскопические следы от применения. Первый этап 102 содержит получение (съемку) трехмерных топографических данных, представляющих трехмерную топографию поверхности этой пули. Можно использовать любую адекватную систему, приспособленную для сканирования пули, чтобы получить трехмерную топографию поверхности пули при требуемом разрешении. Примеры адекватных датчиков содержат лазерные профилометры, конфокальные микроскопы и тому подобное.
Второй этап 104 содержит разбиение (или разделение) заснятых топографических данных на два набора данных, т.е. микроскопические данные и макроскопические данные. Микроскопические данные представляют микроскопические признаки трехмерной топографии поверхности сканируемой области. Эти микроскопические признаки имеют размер порядка микрометра. Макроскопические данные представляют общую форму топографии сканируемой области, которая имеет размер и (или) радиус кривизны порядка миллиметров или сантиметров.
В одном варианте осуществления к топографическим данным прикладывается подходящий фильтр нижних частот, чтобы получить макроскопические данные. Затем микроскопические данные получают вычитанием макроскопических данных из топографических данных.
В другом варианте осуществления к топографическим данным прикладывается фильтр верхних частот, чтобы получить непосредственно микроскопические данные, а макроскопические данные получаются затем вычитанием полученных микроскопических данных из топографических данных.
На фиг.5 третий этап 106 содержит увеличение микроскопических признаков топографии заснятой части пули без модификации формы этой пули. Этап увеличения выполняется путем независимого масштабирования микроскопических данных или макроскопических данных.
В одном варианте осуществления коэффициент масштабирования, имеющий абсолютное значение больше единицы, прикладывается к микроскопическим данным независимо от макроскопических данных, чтобы увеличить микроскопические признаки по отношению к макроскопической форме. В данном случае размер микроскопических признаков увеличивается, тогда как макроскопическая форма пули остается неизменной. Коэффициент масштабирования выбирается в зависимости от желательной степени увеличения для микроскопических признаков топографии. Фиг.6а иллюстрирует топографию участка пули, генерируемую с помощью заснятых топографических данных. При использовании для микроскопических данных коэффициента масштабирования, равного пяти, размер микроскопических признаков топографии, т.е. микроскопические пики и впадины (трещины) увеличиваются, тогда как макроскопическая форма пули остается неизменной, как иллюстрируется на фиг.6b.
Масштабированные микроскопические данные затем объединяются с макроскопическими данными для получения масштабированных топографических данных, представляющих неизменную форму сканированного участка пули с увеличенными микроскопическими признаками на нем.
Следующий этап 108 содержит генерирование трехмерного изображения сканированного участка пули с помощью масштабированных топографических данных. Это генерированное изображение соответствует представлению пули, в котором микроскопические признаки увеличены, тогда как форма остается неизменной. Генерированное изображение может сохраняться в памяти или отображаться на дисплейном блоке.
Хотя настоящее описание относится к масштабированию микроскопических данных, следует понимать, что и макроскопические данные могут масштабироваться, чтобы усилить микроскопические признаки, тогда как микроскопические данные остаются неизменными. В этом случае коэффициент масштабирования, имеющий значение между нулем и единицей, прикладывается к макроскопическим данным, чтобы увеличить микроскопические признаки по отношению к макроскопической форме. В этом случае размер микроскопических признаков остается неизменным, тогда как размеры макроскопической формы сокращаются.
Хотя настоящий способ направлен на генерирование модифицированного изображения топографии пули, следует понимать, что этот способ можно использовать для генерирования модифицированного трехмерного изображения любых иных объектов, имеющих макроскопическую форму и микроскопические признаки. Например, этот способ можно использовать для генерирования модифицированного изображения топографии внутренней поверхности ствола стрелкового оружия.
Хотя настоящее описание относится к приложению положительного коэффициента масштабирования к микроскопическим данным, следует понимать, что к микроскопическим данным может быть приложен отрицательный коэффициент масштабирования меньше минус единицы. Такой отрицательный коэффициент масштабирования можно использовать, когда пулю нужно сравнить со стволом стрелкового оружия, чтобы определить, выстрелена ли эта пуля из этого оружия. Когда пуля выстрелена из оружия, по меньшей мере некоторые микроскопические признаки внутренней поверхности топографии ствола оружия переносятся на пулю, так что пики топографии ствола становятся впадинами в топографии пули, и наоборот. В результате, большая часть топографии пули является негативным изображением топографии ствола. Чтобы сравнить топографию пули с топографией ствола, способ, проиллюстрированный на фиг.5, можно прикладывать как к пуле, так и к стволу с использованием положительного коэффициента масштабирования для пули и отрицательного коэффициента масштабирования для ствола, чтобы инвертировать топографию ствола. Например, первый коэффициент масштабирования, равный +2, может быть приложен к микроскопическим данным пули, а второй коэффициент масштабирования, равный -2, может быть приложен к микроскопическим данным ствола. В результате, увеличенные пики и впадины топографии пули можно сравнивать с увеличенными пиками и впадинами ствола, соответственно. Отрицательный коэффициент масштабирования можно прикладывать к микроскопическим данным пули, а положительный коэффициент масштабирования можно прикладывать к микроскопическим данным ствола.
В другом примере для пользователя может быть легче сравнивать пики различных топографии пули, а не впадины. Если подлежащие сравнению пули имеют каждая топографию, содержащую лучше выраженные впадины, а не пики, пользователь может прикладывать отрицательный коэффициент масштабирования к этим двум пулям, чтобы сравнить негативные или инвертированные топографии этих двух пуль.
В одном варианте осуществления способ 100 содержит далее этап, на котором модифицируют макроскопические данные независимо от микроскопических данных, чтобы модифицировать макроскопическую форму для представления пули. Например, если заснятая пуля деформирована, исходные макроскопические данные могут быть модифицированы, чтобы модифицировать форму деформированной пули. Новая форма деформированной пули может соответствовать форме первоначальной пули или форме сравнительной пули. В этом случае модифицированное трехмерное изображение пули получается путем объединения модифицированных микроскопических данных и модифицированных макроскопических данных. Результирующее изображение является представлением пули с модифицированной формой и увеличенными микроскопическими признаками.
Фиг.7а иллюстрирует две деформированные пули 150 и 152 и первоначальную пулю 154, микроскопические признаки которых увеличены с помощью описанного выше способа. Форма пуль 150 и 152 затем модифицируется, чтобы соответствовать форме первоначальной пули 154. Фиг.7b иллюстрирует пули 156 и 158, которые имеют первоначальную форму пули 154 и соответственно соответствуют пулям 150 и 152. Поскольку три пули 154, 156, 158 имеют одну и ту же первоначальную форму, сравнение этих трех пуль облегчается.
В одном варианте осуществления топографические данные, заснятые на этапе 102 способа 100 представлены квадратной или прямоугольной матрицей [i, j], образующей сетку точек, в которой каждая точка связана с набором пространственных координат X, Y и Z, где индекс i изменяется между 0 и (Ni-1) включительно, а индекс j изменяется между 0 и (Nj-1) включительно. Получаются три матрицы или сетки пространственных координат: X[i, j], Y[i, j] и Z[i, j].
В одном варианте осуществления по трем различным осям X-Y-Z масштаб один и тот же. Значения Х и Y таковы, что расстояние между соседними точками сетки вдоль вертикального или горизонтального направления является постоянной Q или следует статистическому распределению с центром в Q и со стандартным отклонением намного меньше, чем Q, как выражено в следующем уравнении:
В одном варианте осуществления Q есть пиксельный размер датчика. Альтернативно, Q может иметь размерность, отличную от пиксельного размера.
На этапе 104 способа 100 топографические данные, хранящиеся в формате трех сеток, разбивают на микроскопические данные и макроскопические данные. Каждая из трех сеток X[i, j], Y[i, j] и Z[i, j] сворачивается одним и тем же фильтром нижних частот.
Выход этого фильтра является новым набором сеток (XMacro[i, j], YMacro[i, j]), который содержит только макроскопическую информацию о макроскопической форме.
Можно использовать любой подходящий фильтр нижних частот. Этот фильтр нижних частот может быть квадратной однородной матрицей, двумерным гауссовым фильтром или тому подобным. В одном варианте осуществления этот фильтр учитывает окружающую ситуацию, если объект имеет закрытую форму, такую как кольцо или цилиндр, например.
Микроскопические данные затем получаются из разности между исходными топографическими данными и полученными макроскопическими данными, как выражено в следующих уравнениях:
Xmicro[i, j]=X[i, j]-XMacro[i, j]
Ymicro[i, j]=Y[i, j]-YMacro[i, j]
Zmicro[i, j]=Z[i, j]-ZMacro[i, j]
Фильтр верхних частот может быть приложен к трем сеткам X[i, j], Y[i, j] и Z[i, j], чтобы получить микроскопические данные (Xmicro[i, j], Ymicro[i, j], Zmicro[i, j]). Макроскопические данные (Xmacro[i, j], Ymacro[i, j], Zmacro[i, j]) получаются затем вычитанием микроскопических данных (Xmicro[i, j], Ymicro[i, j], Zmicro[i, j]) из исходных топографических данных (X [i,j], Y[i,j], Z[i,j]).
На этапе 106 микроскопические признаки увеличиваются перемножением микроскопических данных (Xmicro[i, j], Ymicro[i, j], Zmicro[i, j]) на один и тот же коэффициент k масштабирования, чтобы получить увеличенные микроскопические данные (kXmicro[i, j], kYmicro[i,j], kZmicro[i, j]). Коэффициент k масштабирования может быть больше 1 или меньшей -1.
Увеличенные микроскопические данные добавляются затем к неизменным макроскопическим данным, как выражено в следующих уравнениях:
XNew[i, j]=XMacro[i, j]+kXmicro[i, j]
YNew[i, j]=YMacro[i, j]+kYmicro[i, j]
ZNew[i, j]=ZMacro[i, j]+kZmicro[i, j]
В другом варианте осуществления трехмерные топографические данные могут быть представлены в формате изображения. Трехмерные топографические данные представляют собой квадратную или прямоугольную матрицу или сетку точек, каждая точка которой связана со значением Z веса или глубины. Любая точка (i, j) этой топографии описывается набором из трех значений (iQ, jQ, Z[i, j]), где Q есть размер пиксела изображения. Индекс i изменяется между 0 и Ni-1 включительно, а индекс j изменяется между 0 и Nj-1. Для иллюстративных целей предполагается, что масштаб по осям i и j один и тот же, но способ может быть обобщен, если это не так.
Макроскопические данные Zmacro[i, j] получаются сверткой топографических данных Z[i, j] подходящим фильтром нижних частот, а микроскопическая информация получается вычитанием макроскопических данных из топографических данных Z[i, j], как выражено в следующем уравнении:
Zmicro[i, j]=Z[i, j]-ZMacro[i, j]
Этап увеличения микроскопических данных выполняется путем перемножения Zmicro[i, j] на коэффициент k масштабирования. Этот коэффициент масштабирования может быть больше 1 или меньше -1.
ZNew[i, j]=ZMacro[i, j]+kZmicro[i, j]
Альтернативно, этап увеличения микроскопических признаков может содержать перемножение макроскопических данных Zmacro[i, j] на коэффициент k', как выражено следующим уравнением:
ZNew[i, j]=k'Zmacro[i, j]+Zmicro[i, j]
В этом случае коэффициент k' масштабирования находится между 0 и 1. Альтернативно, если желательна инверсная топография, коэффициент k' может находиться между -1 и 0.
В одном варианте осуществления способ 100 используется для сравнения пары пуль, имеющих разные формы, и форму одной пули модифицируют, чтобы соответствовать форме другой пули.
Входные данные являются двумя квадратными или прямоугольными матрицами значений X, Y и Z, т.е. первый набор (X1[i, j], Y1[i, j], Z1[i, j]), представляющий топографические данные первой пули, где индекс i изменяется между 0 и (N1i-1), а индекс j изменяется между 0 и (N1j-1), и второй набор (X2[i, j], Y2[i, j], Z2[i, j]), представляющий топографические данные второй пули, где индекс i изменяется между 0 и (N2i-1), а индекс] изменяется между 0 и (N2j-1).
Для целей упрощения предполагается, что для обеих топографии масштаб по трем осям X-Y-Z один и тот же. Значения Х и Y таковы, что расстояние между соседними точками сетки в вертикальном или горизонтальном направлении равно постоянной Q или следует статистическому распределению с центром в Q и со стандартным отклонением намного меньше, чем Q, как выражено в следующем уравнении:
Топографические данные для каждой пули разбивается на микроскопические данные и макроскопические данные. Макроскопические данные получаются приложением фильтра нижних частот к топографическим данным, а микроскопические данные получаются вычитанием полученных макроскопических данных из топографических данных, как выражено в следующих уравнениях:
X1micro[i, j]=X1[i, j]-X1Macro[i, j]
Y1micro[i, j]=Y1[i, j]-Y1Macro[i, j]
Z1micro[i, j]=Z1[i,j]-Z1Macro[i, j]
X2micro[i, j]=X2[i, j]-X2Macro[i, j]
Y2micro[i, j]=Y2[i, j]-Y2Macro[i, j]
Z2micro[i, j]=Z2[i, j]-Z2Macro[i, j]
В одном варианте осуществления в дополнение к трехмерным изображениям для сравнения пары пуль используются изображения неровностей, такие как изображение 70 неровностей, показанное на фиг.3. Изображения неровностей генерируются для двух подлежащих сравнению пуль, и пользователь выбирает одну из двух пуль в качестве эталонной пули. Затем пользователь переносит изображение неровностей первой пули относительно изображения неровностей второй пули, чтобы найти совпадающие линии. При некотором переносе T пользователь находит совпадающие линии на обеих пулях. Затем генерируются трехмерные изображения пуль, и пользователь модифицирует трехмерное изображение одной пули так, чтобы форма этой пули совпадала с формой другой пули, в дополнение к увеличению микроскопических признаков для двух пуль, как описано выше.
В дальнейшем представлены четыре сценария для модификации формы одной пули, чтобы она совпала с формой другой пули. Для целей упрощения перенос T прикладывается к первой пуле. Эти сценарии могут обобщаться для переноса T1 и T2, приложенного, соответственно, к каждой пуле. Далее, к обеим пулям прикладывается коэффициент k масштабирования. Сценарии могут обобщаться для коэффициентов k1 и k2, прикладываемых, соответственно, к каждой пуле.
В одном варианте осуществления к обеим пулям можно приложить коэффициент растяжения, поскольку две сравниваемые пули могут подвергнуться различному коэффициенту расширения во время стрельбы. Для целей упрощения коэффициент S растяжения прикладывается к первой пуле. Сценарии могут обобщаться для коэффициентов S1 и S2 растяжения, соответственно, для каждой пули.
В одном варианте осуществления пули могут иметь заворачивающуюся форму. Альтернативно, по меньшей мере одна из двух пуль может не иметь заворачивающейся формы, когда, например, пуля является фрагментом или только часть реальной окружности заснята трехмерным датчиком.
В одном варианте осуществления N1i равно N2i, никакого растяжения S не требуется, и по меньшей мере первая пуля имеет заворачивающуюся форму. В этом случае форма первой пули прикладывается ко второй пуле путем замены набора макроскопических данных второй пули, т.е. (X2Macro[i, j], Y2Macro[i, j], Z2Macro[i, j]) на то же для первой пули, т.е. (X1Macro[i', j], Y1Macro[i', j], Z1Macro[i', j]),
где i'=(i-T)Mod Ni.
Изображение для второй пули генерируется с помощью нижеследующих модифицированных топографических данных:
X2New[i, j]=X1Macro[i', j]+kX2micro[i, j]
Y2New[i, j]=Y1Macro[i', j]+kY2micro[i, j]
Z2New[i, j]=Z1Macro[i', j]+kZ2micro[i, j],
где k представляет собой коэффициент масштабирования для макроскопических данных.
Изображение для первой пули генерируется с помощью нижеследующих модифицированных топографических данных:
X1New[i, j]=X1Macro[i, j]+kX1micro[i, j]
Y1New[i, j]=Y1Macro[i, j]+kY1micro[i, j]
Z1New[i, j]=Z1Macro[i, j]+kZ1micro[i, j]
В другом варианте осуществления N1i отличается от N2i, по меньшей мере первая пуля имеет заворачивающуюся форму, и требуется растяжение S. В этом случае форма первой пули прикладывается ко второй пуле путем замены набора макроскопических данных второй пули, т.е. (X2Macro[i, j], Y2Macro[i, j], Z2Macro[i, j]) на то же для первой пули, т.е. (X1Macro[i',j], Y1Macro[i',j], Z1Macro[i',j]),
где i' есть комбинация операций модуляции и изменения масштаба и выражается как:
i'=[(i-T)*SMod Ni].
Следует понимать, что может потребоваться интерполяция, если S не является целым числом.
Изображение для второй пули генерируется с помощью нижеследующих модифицированных топографических данных:
X2New[i, j]-X1Macro[i', j']+kX2micro[i, j]
Y2New[i, j]=Y1Macro[i', j]+kY2micro[i, j]
Z2New[i, j]=Z1Macro[i', j]+kZ2micro[i, j],
где k представляет собой коэффициент масштабирования для макроскопических данных.
Изображение для первой пули генерируется с помощью нижеследующих модифицированных топографических данных:
X1New[i, j]=X1Macro[i, j]+kX1micro[i, j]
Y1New[i, j]=Y1Macro[i, j]+kY1micro[i, j]
Z1New[i, j]=Z1Macro[i, j]+kZ1micro[i, j]
В другом варианте осуществления первая пуля не имеет заворачивающейся формы и не требуется никакого растяжения. В этом случае форма первой пули прикладывается ко второй пуле путем замены набора макроскопических данных второй пули, т.е. (X2Macro[i, j], Y2Macro[i, j], Z2Macro[i, j]) на то же для первой пули, т.е. (X1Macro[i', j], Y1Macro[i', j], Z1Macro[i', j]), где i'=(i-Т) и Т соответствует переносу, приложенному к изображению неровностей первой пули для между двумя пулями совпадающих следов от применения.
Общая область между двумя пулями определяется набором индексов i, которые удовлетворяют следующим уравнениям:
0≤i 0≤i-T Изображение для второй пули генерируется с помощью нижеследующих модифицированных топографических данных: X2New[i, j]=X1Macro[i', j]+kX2micro[i, j] Y2New[i, j]-Y1Macro[i', j]+kY2micro[i, j] Z2New[i, j]=Z1Macroti', j]+kZ2micro[i, j], где k представляет собой коэффициент масштабирования, приложенный к макроскопическим данным, чтобы увеличить микроскопические признаки. Изображение для первой пули генерируется с помощью нижеследующих модифицированных топографических данных: X1New[i, j]=X1Macro[i, j]+kX1micro[i, j] Y1New[i, j]=Y1Macro[i, j]+kY1micro[i, j] Z1New[i,j]=Z1Macro[i, j]+kZ1micro[i, j] В еще одном варианте осуществления N1i и N2i различны, требуется растяжение S, и первая пуля не является заворачивающейся. В этом случае форма первой пули прикладывается ко второй пуле путем замены набора макроскопических данных второй пули, т.е. (X2Macro[i, j], Y2Macro[i, j], Z2Macro[i, j]) на то же для первой пули, т.е. (X1Macro[i',j], Y1Macro[i',j], Z1Macro[i',j]), где i'-[(i-T)*S]. Следует понимать, что может потребоваться интерполяция, если S не является целым числом. Общая область между двумя пулями определяется набором индексов i, которые удовлетворяют следующим уравнениям: 0≤i 0≤(i-T)*S Изображение для второй пули генерируется с помощью нижеследующих модифицированных топографических данных: X2New[i, j]=X1Macro[i', j]+kX2micro[i, j] Y2New[i,j]=Y1Macro[i', j]+kY2micro[i, j] Z2New[i, j]=Z1Macro[i', j]+kZ2micro[i, j], где k представляет собой коэффициент масштабирования, приложенный к макроскопическим данным, чтобы увеличить микроскопические признаки. Изображение для первой пули генерируется с помощью нижеследующих модифицированных топографических данных: X1New[i, j]=X1Macro[i, j]+kX1micro[i, j] Y1New[i, j]=Y1Macro[i, j]+kY1micro[i, j] Z1New[i, j]=Z1Macro[i, j]+kZ1micro[i, j] Форму пули можно заменять любой подходящей формой или фигурой. Например, форму пули можно заменять видом пули, с которой она сравнивается, или видом ствола, с которым она сравнивается. Альтернативно, форму пули можно заменять эталонной формой, например, в качестве аналитической формы. В одном варианте осуществления форму пули заменяют аналитической цилиндрической формой, которая соответствует форме первоначальной пули. Если предполагается, что ось Х является осью симметрии, то макроскопические данные пули, т.е. X1Macro[i, j], Y1Macro[i, j], Z1Macro[i, j] заменяются на: X1Macro[i,j], Rcosθ[i], Rsinθ[i], где R есть радиус цилиндра, a θ[i] вычисляется следующим образом: θ[i]=N1i*(i-1)/(2π). Для отображения топографии, генерируемой настоящими способами, и для комбинирования ее с другими релевантными доступными данными можно использовать стандартные методы. Некоторые из этих методов иллюстрируются на фиг.8а, 8b и 8c. К топографии может прикладываться визуализация, которой могут быть либо необработанные заснятые данные, либо цифровые данные, которые получаются из преобразований, приложенных к необработанным данным (т.е. увеличение микроскопической информации или модификации макроскопической информации, либо и то, и другое). Пример, показан на фиг.8а. К отображаемой топографии можно также приложить текстуру. Доступные изображения текстуры могут быть двумерной мозаикой и мозаикой неровностей (последняя уже показана на фиг.3). Примеры обеих приложенных текстур показаны на фиг.8b и 8c, соответственно. Визуализация основана на моделях отражения, рассеяния и затенения, которые общеизвестны специалистам. Такие модели могут имитировать соотношение между поступающим светом от виртуальных источников света в известных местоположениях в пространстве и исходящим светом от освещаемых объектов. Параметры этих моделей можно динамически регулировать, чтобы внести реалистический аспект в отражающие объекты. Можно имитировать различные типы поверхностей, такие как металлическую (т.е. сильно отражающую) или более диффузную поверхность. Можно также имитировать множественные отражения и световые ловушки высокопроизводительным аппаратным обеспечением. Приложенная к каждому пикселу визуализация является функцией местной нормали, относительным положением виртуального светового источника по отношению к этому пикселу и относительным положением наблюдателя по отношению к этому пикселу. Выход операции визуализации можно модифицировать увеличением проекции местной нормали n в заранее заданном направлении v. Нормаль n можно заменить следующей нормалью n': где k есть выбираемое действительное число, а v есть заранее заданное направление. Это глобальное преобразование нормали, известное как чрезмерный наклон, в особенности пригодно, когда трехмерная топография описана в формате изображения (iQ, jQ, Z[i, j]), как описано выше, и когда нормированное направление v взято по оси Z. Можно также использовать другой способ, который является не глобальным. В этом случае нормаль заменяется усилением ее разности компонент по отношению к средней нормали, вычисленной из соседства вокруг пиксела: Можно также использовать другое преобразование нормали (глобальное или неглобальное). Фиг.9 иллюстрирует систему для генерирования модифицированного представления объекта, имеющего макроскопическую форму и микроскопические признаки, встроенную в компьютерное устройство 80 в качестве приложения 86, исполняемого в процессоре 84, причем процессор 84 соединен с памятью 82. Память 82, доступная для процессора 84, принимает и сохраняет данные, такие как заснятые трехмерные топографии и любую иную информацию, используемую системой. Память 82 может быть основной памятью, такой как высокоскоростное оперативное запоминающее устройство (ОЗУ) (RAM), или вспомогательным накопителем, таким как жесткий диск, гибкий диск или накопитель на магнитной ленте. Эта память может быть памятью любого типа, такой как постоянно запоминающее устройство (ПЗУ) (ROM) или оптический носитель записи, такой как видеодиск и компакт-диск. Процессор 84 может обращаться к памяти 82 для извлечения данных. Этот процессор 84 может быть любым устройством, которое может выполнять операции над данными. Примерами являются центральный процессор (ЦП) (CPU), препроцессор, микропроцессор, графический процессор (GPU/VPU), физический процессор (PPU), цифровой сигнальный процессор и сетевой процессор. Приложение 86 связано с процессором 84 и реализовано с возможностью выполнять разнообразные задачи, как пояснено выше. Выходной сигнал можно передавать пользователю посредством дисплея. Фиг.10 иллюстрирует более подробный пример приложения 86 по фиг.9. В этом примере приложение содержит разделяющий модуль 92, приспособленный для разделения трехмерных топографических данных, представляющих по меньшей мере одну часть объекта, имеющего макроскопическую форму и микроскопические признаки, на микроскопические данные, представляющие эти микроскопические признаки, и на макроскопические данные, представляющие эту макроскопическую форму; увеличивающий модуль 94, приспособленный независимо масштабировать одни из микроскопических данных и макроскопических данных, чтобы увеличить микроскопические признаки по отношению к макроскопической форме и получить масштабированные топографические данные; и генератор 96 изображения, приспособленный генерировать трехмерное изображение с помощью масштабированных топографических данных. В одном варианте осуществления эта система может также содержать сканирующее устройство, приспособленное снимать трехмерную топографию объекта и приспособленное передавать данные заснятой трехмерной топографии в систему, и (или) дисплейный блок, приспособленный отображать их. Хотя в блок-схемах изобретение проиллюстрировано как группы дискретных компонентов, осуществляющих связь друг с другом по различным цифровым сигнальным соединениям, специалистам будет понятно, что варианты осуществления обеспечиваются комбинацией аппаратных и программных компонентов, реализуемых заданной функцией или операцией аппаратной или программной системы, и множество проиллюстрированных трактов воплощается передачей данных внутри компьютерного приложения или операционной системы. В проиллюстрированной структуре тем самым обеспечивается эффективность рассмотрения настоящего варианта осуществления. Варианты осуществления изобретения, описанные выше, предназначены только для представления примеров. Объем данного изобретения поэтому считается ограниченным только объемом приложенной формулы изобретения.
Реферат
Изобретение относится к области генерирования изображений. Технический результат - упрощение способа сравнения объектов в том случае, когда требуется одновременно сравнить макроскопическую форму объектов и их микроскопические признаки. Способ генерирования трехмерного представления объекта, содержащий этапы, на которых: получают трехмерные топографические данные, представляющие по меньшей мере один участок объекта, имеющего макроскопическую форму и микроскопические признаки следов от применения на поверхности объекта; разделяют указанные трехмерные топографические данные на микроскопические данные, представляющие микроскопические признаки, и макроскопические данные, представляющие макроскопическую форму; независимо масштабируют микроскопические данные или макроскопические данные для выделения микроскопических признаков относительно макроскопической формы, получая тем самым масштабированные топографические данные; и генерируют трехмерное изображение с помощью масштабированных топографических данных, получая тем самым модифицированное представление с выделенными микроскопическими признаками для указанного по меньшей мере одного участка объекта. 3 н. и 16 з.п. ф-лы, 10 ил.
Формула
получают трехмерные топографические данные, представляющие по меньшей мере один участок объекта, имеющего макроскопическую форму и микроскопические признаки следов от применения на поверхности объекта;
разделяют указанные трехмерные топографические данные на микроскопические данные, представляющие микроскопические признаки, и макроскопические данные, представляющие макроскопическую форму;
независимо масштабируют микроскопические данные или макроскопические данные для выделения микроскопических признаков относительно макроскопической формы, получая тем самым масштабированные топографические данные; и
генерируют трехмерное изображение с помощью масштабированных топографических данных, получая тем самым модифицированное представление с выделенными микроскопическими признаками для указанного по меньшей мере одного участка объекта.
процессор;
память для хранения исходных трехмерных топографических данных, представляющих по меньшей мере один участок объекта, имеющего макроскопическую форму и микроскопические признаки следов от применения на поверхности объекта; и
приложение, связанное с процессором и с памятью, при этом приложение при его исполнении в процессоре выполнено с возможностью:
разделения указанных трехмерных топографических данных на микроскопические данные, представляющие микроскопические признаки, и на макроскопические данные, представляющие макроскопическую форму;
независимого масштабирования микроскопических данных или макроскопических данных для выделения микроскопических признаков относительно макроскопической формы, получая тем самым масштабированные топографические данные; и
генерирования трехмерного изображения с помощью масштабированных топографических данных, получая тем самым модифицированное представление с выделенными микроскопическими признаками для указанного по меньшей мере одного участка объекта.
разделяющий модуль, выполненный с возможностью разделения трехмерных топографических данных, представляющих по меньшей мере один участок объекта, имеющего макроскопическую форму и микроскопические признаки следов от применения на поверхности объекта, на микроскопические данные, представляющие указанные микроскопические признаки, и макроскопические данные, представляющие указанную макроскопическую форму;
выделяющий модуль, выполненный с возможностью независимо масштабировать микроскопические данные или макроскопические данные для выделения микроскопических признаков относительно макроскопической формы, получая тем самым масштабированные топографические данные; и
генератор изображения, выполненный с возможностью генерирования трехмерного изображения с помощью масштабированных топографических данных, получая тем самым модифицированное представление с выделенными микроскопическими признаками для указанного по меньшей мере одного участка объекта.
Комментарии