Улучшенный способ заключительной обработки и устройство для использования в системе декодирования сигнала изображения - RU2154917C2
Код документа: RU2154917C2
Чертежи
Описание
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к способу заключительной обработки, который
используется в системе декодирования сигнала изображения; а более конкретно к усовершенствованному способу, позволяющему устранять эффект объединения в блоки, имеющийся на границе блока
декодированных
данных изображения, путем эффективной заключительной обработки декодированных данных изображения, благодаря чему улучшается качество изображения системы.
УРОВЕНЬ
ТЕХНИКИ
в
различных электронных/электрических применениях, таких как телевидение и видеотелефонные системы высокой четкости, может потребоваться передача сигнала изображения в цифровой
форме. Когда сигнал
изображения представлен в цифровой форме, то это связано с появлением большого количества цифровых данных. Однако, поскольку имеющаяся частотная полоса обычного канала передачи
ограничена, то для
передачи по нему сигнала изображения часто оказывается необходимым для сжатия большого количества цифровых данных использовать систему кодирования изображения. Известно, что среди
различных методов
видеосжатия наиболее эффективным является так называемый гибридный метод кодирования, который комбинирует методы временного и пространственного сжатия со статистическим методом
кодирования.
В большинстве гибридных методах кодирования применяются адаптивное меж- / внутри модовое кодирование, ортогональное преобразование, квантование коэффициентов преобразования, КДС (кодирование длин серий) и КДП (кодирование с переменной длиной). Адаптивное меж- / внутри модовое кодирование - это метод выбора видеосигнала для последующего ортогонального преобразования либо из данных ИКМ (импульсно-кодовой модуляции) текущего кадра, либо из данных ДИКМ (дифференциальной импульсно-кодовой модуляции) адаптировано, например, на основе их вариации. Межмодовое кодирование также известно как предиктивный метод, который основан на концепции сокращения дублирований (избыточности) между соседними кадрами, это метод определения перемещения объекта между текущим кадром и одним или двумя соседними кадрами и предсказания текущего кадра в соответствии со скоростью движения объекта, для того чтобы получить сигнал ошибки, представляющий разность между текущим кадром и его предсказанием. Этот метод кодирования описан, например, в работе Staffan Ericsson "Fixed and Adapted Predictors for Hybrid Predictive/Transform Coding", IEEE Transactions on Communications, COM-33, N 12, pp. 1291-1301 (декабрь 1985); и в работе Ninomiya и Jhtsuka "A Motion-compensated Interframe Coding Scheme for Television Pictures", IEEE Transactions on Communications, COM-30, N 1, pp.201-210 (январь 1982), обе работы включены в качестве источников информации.
Ортогональное преобразование, которое использует пространственные корреляционные соотношения между данными изображения, такими как данные ИКМ текущего кадра или данными ДИКМ компенсированного движения, и производит сокращение или удаление пространственных дублирований между ними, преобразует блок цифровых данных изображения в набор коэффициентов преобразования. Этот метод описан в работе Chen и Pratt "Scene Adaptive Coder", IEEE Transactions on Communications, СОМ-32, N 3, pp.225-232 (март 1984). Количество данных, которые должны быть переданы, можно эффективно сжать путем обработки этих данных по коэффициентам преобразования с помощью квантования, сканирования по зигзагу, кодирования длин серий (КДС) и кодирования с переменной длиной (КДП).
Закодированные данные изображения передаются по обычному передающему каналу в декодер сигнала изображения, входящий в систему декодирования сигнала изображения, которая выполняет обратный процесс по отношению к операции кодирования, для того чтобы таким образом восстановить исходные данные изображения. Восстановленные данные изображения, в нормальном виде, содержат досадные артефакты, такие как эффект объединения в блоки, проявляющийся в том, что линия границы блока становится видимой на принимающем конце. Такой эффект объединения в блоки возникает в связи с тем, что кадр кодируется в единицах блоков.
Как хорошо известно в данной области техники, для улучшения качества восстановленных данных изображения или декодированных данных изображения, как правило, декодированные данные изображения дополнительно обрабатываются с помощью фильтра постобработки (заключительной обработки). Известный из уровня техники фильтр постообработки осуществляет фильтрацию декодированных данных изображения с заданной частотой вырезания (отключения), благодаря чему улучшается качество декодированных данных изображения.
Однако, поскольку обычная постобработка (заключительная обработка) выполняется без принятия во внимание данных индивидуальных элементов изображения, прошедших фильтрацию, то такая фильтрация может лишь незначительно уменьшить эффект объединения в блоки на границах блоков или может даже приводить к возникновению искаженных данных изображения, таким образом, снижая качество изображения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Таким образом, основная задача изобретения заключается в создании способа заключительной обработки для использования в системе
декодирования сигнала
изображения, позволяющего значительно снизить или устранить эффект объединения в блоки, проявляющийся на границе блоков декодированных данных изображения, путем эффективной
заключительной обработки
декодированных данных изображения, благодаря чему улучшается качество изображения системы.
Согласно изобретению фильтрующее устройство для использования в
системе декодирования сигнала
изображения, для заключительной обработки, на поэлементной основе, переходя от одного элемента изображения к другому элементу изображения, декодированных данных
изображения текущего кадра из декодера
сигнала изображения, входящего в систему декодирования сигнала изображения, содержит:
запоминающее устройство для хранения декодированных данных
изображения текущего кадра;
буфер для
хранения данных элемента изображения с заданными координатами, эти данные представляют величину элемента изображения, который должен фильтроваться, и
включены в декодированные данные изображения
текущего кадра;
фильтр для фильтрации данных элемента изображения с заданными координатами для получения отфильтрованных данных элемента
изображения с заданными координатами;
сумматор для суммирования заданной пороговой величины с данными элемента изображения с заданными координатами, благодаря чему получается верхняя
величина;
первый компаратор для сравнения
отфильтрованных данных элемента изображения с заданными координатами с верхней величиной для получения первого сигнала выбора;
первый ключ
для выбора, в ответ на первый сигнал выбора, данных
элемента изображения с заданными координатами в том случае, если отфильтрованные данные элемента изображения с заданными координатами больше, чем
верхняя величина; или выбора, в ответ на первый сигнал
выбора, отфильтрованных данных элемента изображения с заданными координатами в том случае, если отфильтрованные данные элемента изображения с
заданными координатами не больше, чем верхняя величина;
вычитатель для вычитания заданной пороговой величины из данных элемента изображения с заданными координатами, благодаря чему получается
нижняя величина;
второй компаратор для сравнения
отфильтрованных данных элемента изображения с заданными координатами или данных элемента изображения с заданными координатами, которые
выбраны на первом ключе, с нижней величиной, для получения
второго сигнала выбора;
второй ключ для выбора, в ответ на второй сигнал выбора, данных элемента изображения с заданными
координатами в том случае, если отфильтрованные данные элемента
изображения с заданными координатами или данные элемента изображения с заданными координатами, которые выбраны на первом ключе, меньше,
чем нижняя величина; или выбора, в ответ на второй сигнал выбора,
отфильтрованных данных элемента изображения с заданными координатами или данных элемента изображения с заданными координатами,
которые выбраны на первом ключе, в случае если отфильтрованные данные
элементы изображения с заданными координатами или данные элемента изображения с заданными координатами, которые выбраны на первом
ключе, не меньше, чем нижняя величина, для получения, таким образом,
отфильтрованного результата для элемента изображения с заданными координатами; и
контроллер для обновления данных
элемента изображения с заданными координатами, хранящихся в запоминающем
устройстве, путем замены их на отфильтрованный результат для элемента изображения с заданными координатами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышеуказанная и другие цели и особенности
настоящего изобретения станут ясными из последующего описания предпочтительных вариантов изобретения с учетом прилагаемых
чертежей, на которых:
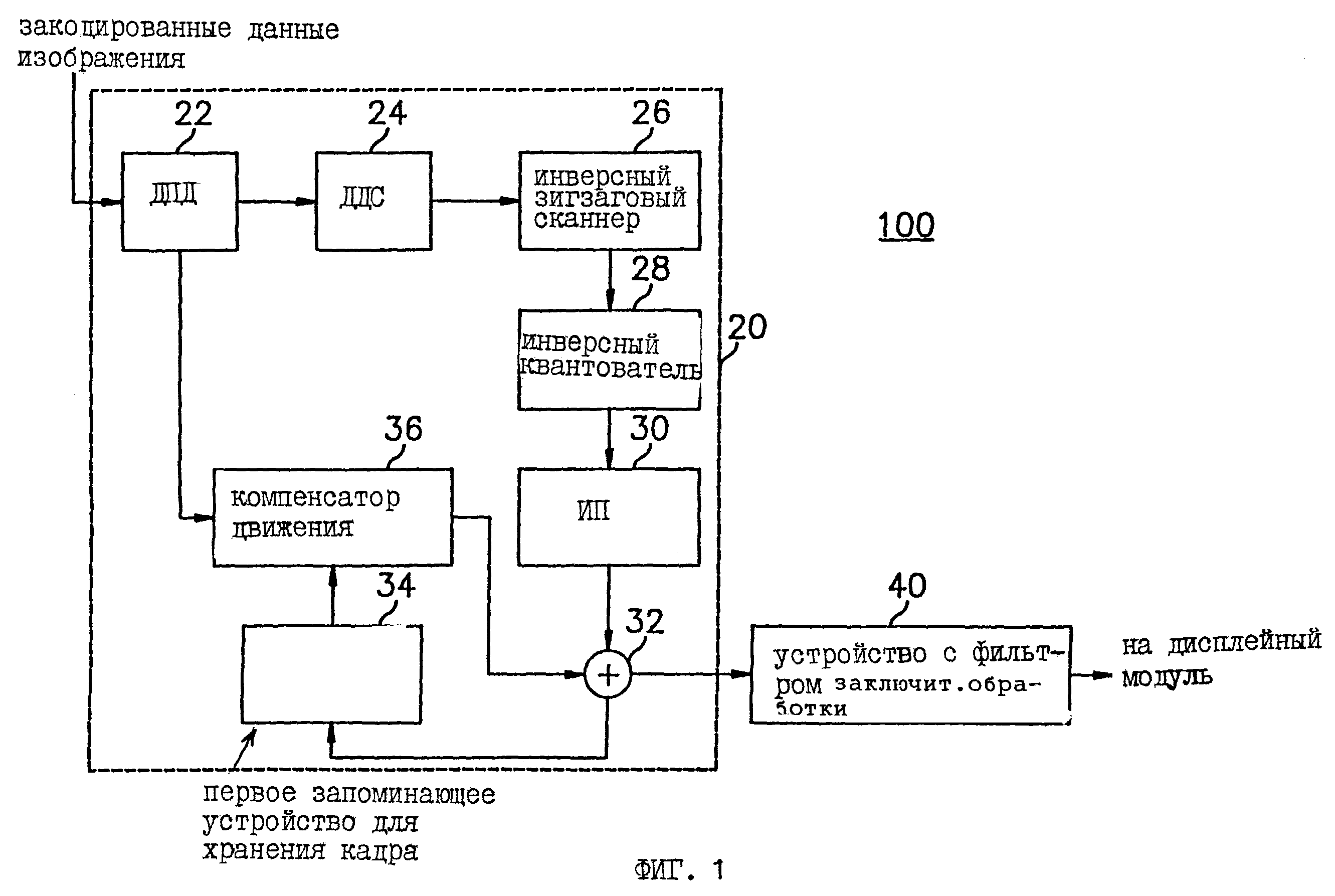
фиг. 1 представляет блок-схему системы
декодирования сигнала изображения;
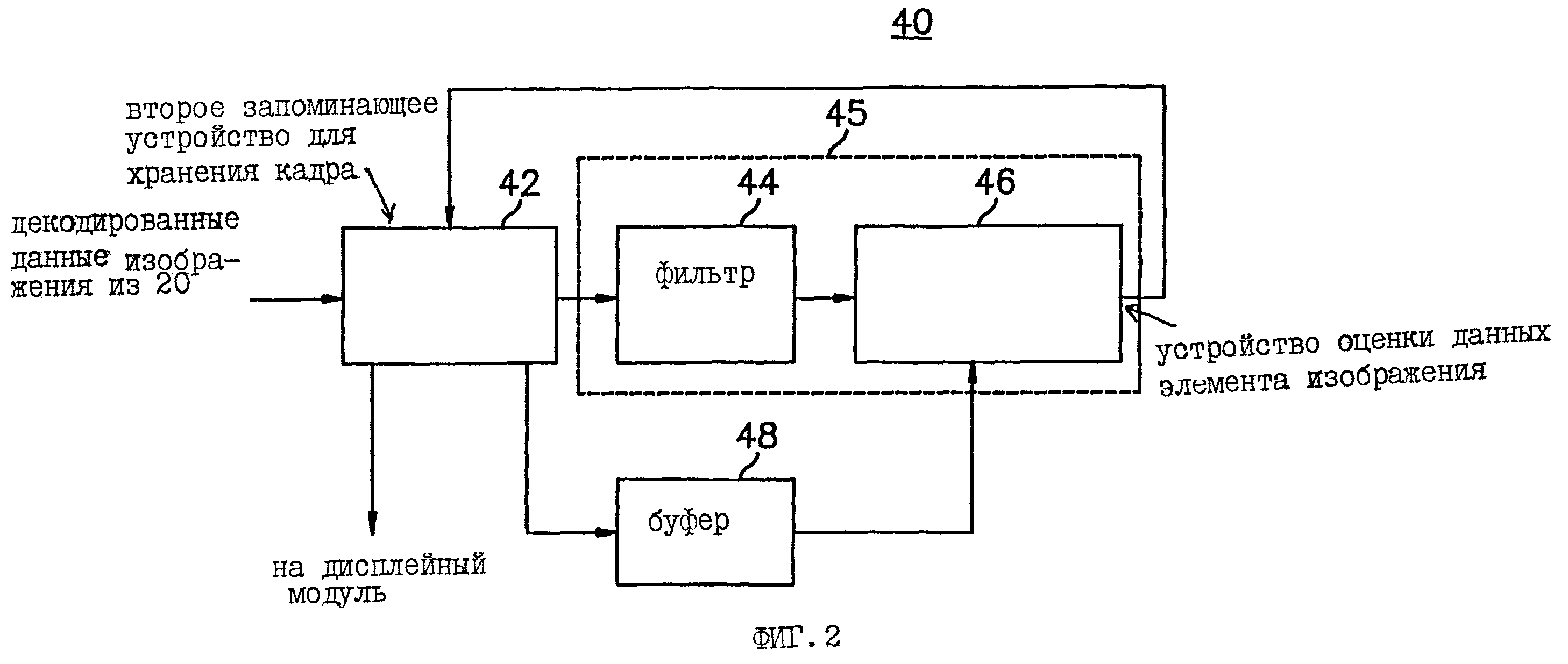
фиг.2 представляет детализированную блок-схему устройства с фильтром заключительной
обработки, показанного на фиг.1, согласно предпочтительному варианту
осуществления настоящего изобретения;
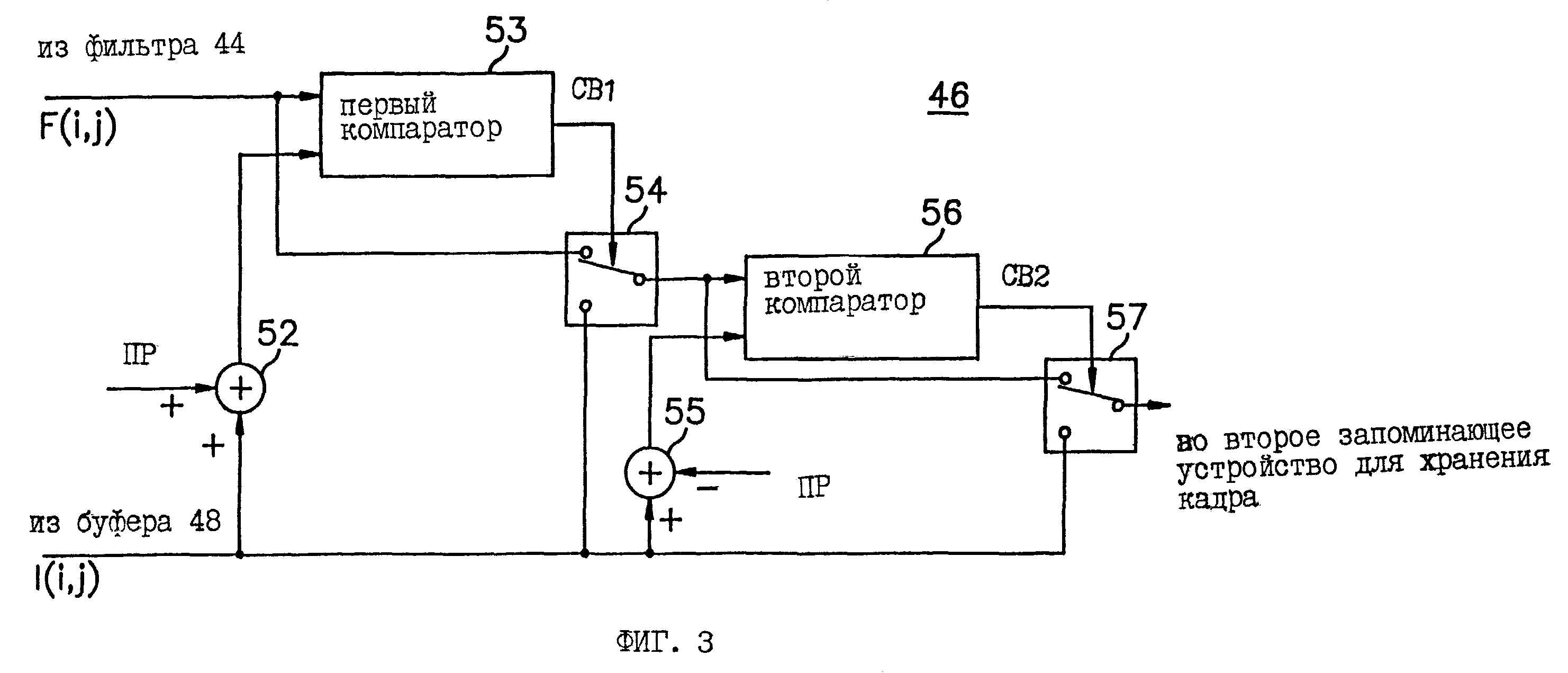
фиг. 3 иллюстрирует детализированную блок-схему устройства оценки данных элемента
изображения, показанного на фиг. 2; и
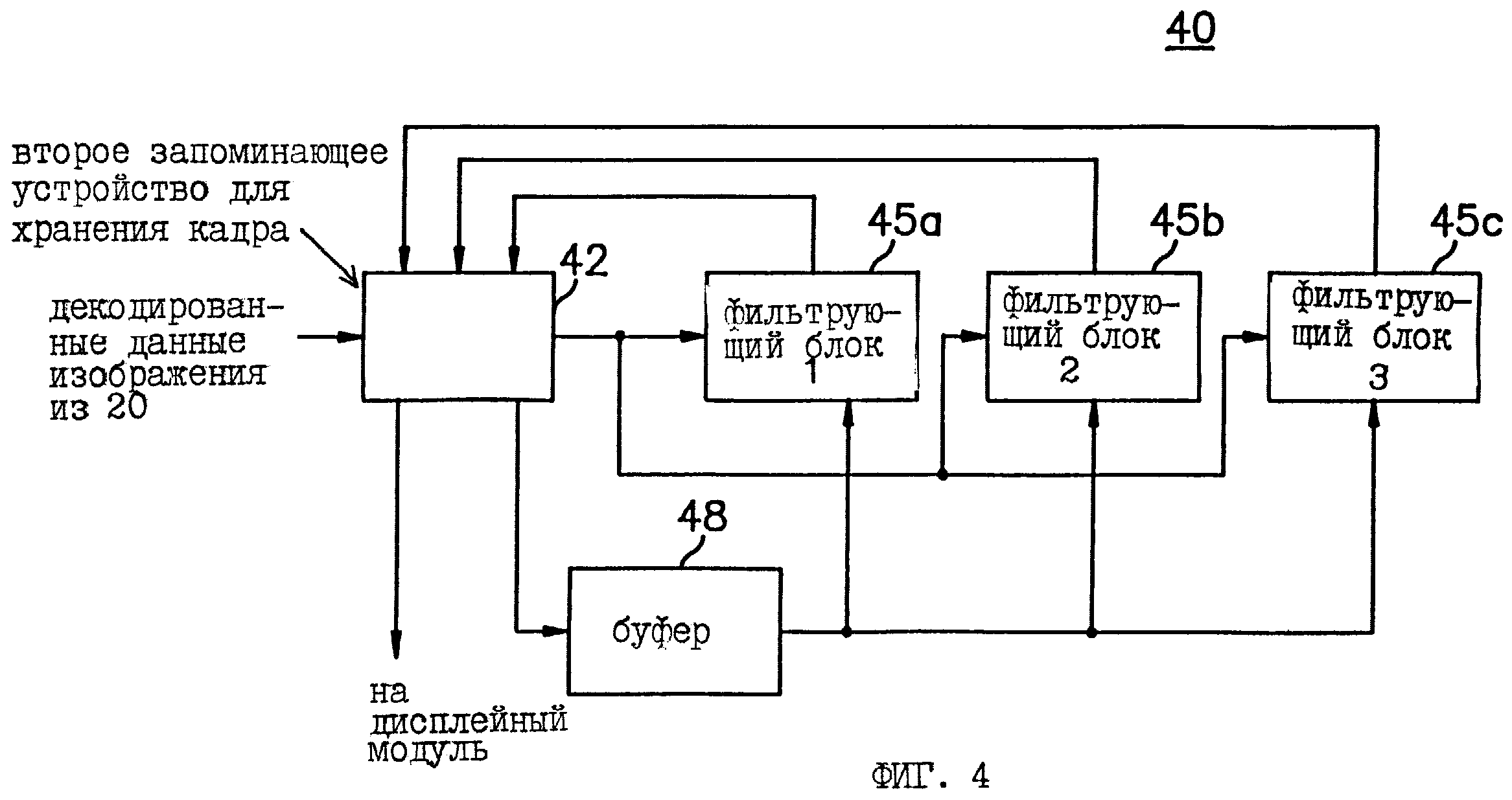
фиг.4 предлагает
детализированную блок-схему устройства с фильтром заключительной обработки, показанного на фиг. 1, согласно другому предпочтительному
варианту осуществления настоящего изобретения.
СПОСОБЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
На фиг. 1 показана система 100 декодирования сигнала изображения для объяснения способа
заключительной обработки и устройства согласно настоящему
изобретению. Система 100 декодирования сигнала изображения содержит декодер 20 сигнала изображения и устройство 40 с фильтром заключительной
обработки, при этом декодер 20 сигнала изображения имеет
декодер 22 переменной длины (ДПД), декодер 24 длин серий (ДДС), инверсный зигзаговый сканнер 26, инверсный квантователь 28, инверсный
преобразователь (ИП) 30, сумматор 32, первое запоминающее
устройство 34 для хранения кадра и компенсатор 36 движения.
В декодере 20 сигнала изображения закодированные данные изображения, т. е. набор коэффициентов преобразования и векторов движения, закодированных с переменной длиной, подаются в ДПД (декодер переменной длины) 22 на поблочной основе. ДПД 22 предназначен для декодирования набора коэффициентов преобразования и векторов движения, закодированных с переменной длиной, для получения коэффициентов преобразования с закодированными длинами серий, которые подаются в ДДС 24, и векторов движения, которые подаются в компенсатор 36 движения соответственно. ДПД 22 представляет собой по существу таблицу преобразования: то есть в ДПД 22 получают множество наборов кодов для определения соответствующих соотношений между кодами переменной длины и их кодами длин серий или векторов движения. Затем коэффициенты преобразования с закодированными длинами серий подаются в ДДС 24, который также представляет собой таблицу преобразования, где генерируются коэффициенты преобразования, сканированные по зигзагу. Эти коэффициенты преобразования, сканированные по зигзагу, затем подаются в инверсный зигзаговый сканнер 26.
В инверсном зигзаговом сканнере 26 восстанавливаются коэффициенты преобразования, сканированные по зигзагу, для получения блоков квантованных коэффициентов преобразования, которые подаются в инверсный квантователь 28. В инверсном квантователе 28 каждый блок квантованных коэффициентов преобразования преобразуется в набор коэффициентов преобразования. Затем этот набор коэффициентов преобразования подается в ИП 30, например инверсный дискретный преобразователь по косинусу, который преобразовывает полученный набор коэффициентов преобразования в набор разностных данных между блоком текущего кадра и соответствующим ему блоком предыдущего кадра. Набор разностных данных затем направляют в сумматор 32.
В то же время компенсатор 36 движения выделяет набор данных соответствующего элемента изображения из предыдущего кадра, хранящихся в первом запоминающем устройстве 34 для хранения кадра, на основе вектора движения из ДПД 22, который соответствует каждому блоку текущего кадра, и снабжает сумматор 32 этим набором выделенных данных для элемента изображения. Затем набор выделенных данных элемента изображения из компенсатора 36 движения и набор разностных данных элемента изображения из ИП 30 суммируются в сумматоре 32 для получения, таким образом, восстановленных данных изображения для заданного блока текущего кадра. Восстановленные данные изображения или декодированные данные изображения этого блока затем подаются в первое запоминающее устройство 34 для хранения кадра для их сохранения и в устройство 40 с фильтром заключительной обработки.
В устройстве 40 с фильтром заключительной обработки согласно настоящему изобретению заключительная обработка декодированных данных изображения из сумматора 32 осуществляется путем эффективной фильтрации декодированных данных изображения. Затем данные изображения, полученные в результате заключительной обработки, передаются на дисплейный модуль (не показан).
На фиг. 2 изображена детализированная блок-схема устройства 40 с фильтром заключительной обработки, показанного на фиг. 1, которое выполнено в соответствии с первым вариантом осуществления настоящего изобретения.
Устройство 40 с фильтром заключительной обработки, которое имеет второе запоминающее устройство 42 для хранения кадра, фильтрующий блок 45 и буфер 48, фильтрует декодированные данные изображения текущего кадра, полученные из декодера 20 сигнала изображения, путем поэлементной обработки текущего кадра.
Декодированные данные изображения текущего кадра из декодера 20 сигнала изображения сначала запоминаются во втором запоминающем устройстве 42 для хранения кадра. В ответ на управляющий сигнал из системного контроллера (не показан) данные элемента изображения с заданными координатами, т.е. величина, соответствующая элементу изображения с заданными координатами, извлекаются из второго запоминающего устройства 42 для хранения кадра и подаются в буфер 48; а данные для элемента изображения NxN, например 3 х 3, где элементы изображения включают элемент изображения с заданными координатами и соседние с ним элементы изображения, подаются в фильтр 44, входящий в фильтрующий блок 45, при этом элемент изображения с заданными координатами обозначает элемент изображения, который должен пройти фильтрацию в текущем кадре и который находится в центре элементов изображения NxN, где N - положительное целое число.
Фильтрующий блок 45 предназначен для получения отфильтрованного результата для элемента изображения с заданными координатами согласно настоящему изобретению. А конкретнее, фильтр 44, который принимает данные NxN элементов изображения из второго запоминающего устройства 42 для хранения кадра, выполняет их фильтрацию, например, с заданной частотой вырезания, для того чтобы благодаря этому получить отфильтрованные данные элемента изображения с заданными координатами. Фильтр 44 может быть выполнен с использованием таких обычных низкочастотных фильтров, как медиан-фильтр или фильтр Лапласа, хорошо известных в данной области техники. Следует заметить, что заданная частота вырезания фильтра 44 или характеристики фильтра могут быть определены на основе требующегося качества изображения системы декодирования изображения.
Затем отфильтрованные данные элемента изображения с заданными координатами из фильтра 44 подаются в устройство 46 оценки данных элемента изображения, при этом выбираются отфильтрованные данные элемента изображения с заданными координатами или исходные данные элемента изображения с заданными координатами на основе абсолютного значения величины разности между ними, для того чтобы, таким образом, получить отфильтрованный результат для элемента изображения с заданными координатами, который направляется назад во второе запоминающее устройство 42 для хранения кадра. Процесс фильтрации повторяется для всех элементов изображения в текущем кадре, и затем отфильтрованный текущий кадр, запомненный во втором запоминающем устройстве 42 для хранения кадра, подается на дисплейный модуль для его отображения.
На фиг. 3 представлена детализированная блок-схема устройства 46 оценки данных элемента изображения. Кратко функция устройства 46 для оценки данных элемента изображения может быть раскрыта следующим образом. В случае, если абсолютная величина разности между первоначальными данными элемента изображения с заданными координатами и отфильтрованными данными элемента изображения с заданными координатами больше, чем заданная пороговая величина, т. е. ПР, то первоначальные данные элемента изображения с заданными координатами принимаются как отфильтрованный результат для элемента изображения с заданными координатами; а если абсолютная величина разности не больше, чем заданная пороговая величина, то отфильтрованные данные элемента изображения с заданными координатами принимаются как отфильтрованный результат для элемента изображения с заданными координатами.
Устройство 46 оценки данных элемента изображения содержит два компаратора 53, 56, два ключа 54, 57, сумматор 52 и вычитатель 55. Отфильтрованные данные элемента изображения с заданными координатами для простоты изложения обозначены как F(ij), и первоначальные данные элемента изображения с заданными координатами обозначены как I(i,j). F(i,j) из фильтра 44 вводятся в первый компаратор 53 и первый ключ 54. I(i,j) из буфера 48 связываются с сумматором 52, вычитателем 55, а также первым ключом 54 и вторым ключом 57.
Сначала заданная пороговая величина ПР прибавляется к I(i,j) в сумматоре 52 и верхняя величина, т.е. I(i,j)+ПР, подается в первый компаратор 53. В первом компараторе 53 F(i,j) сравнивается с верхней величиной I(i,j)+ПP для получения, таким образом, первого сигнала CB1 выбора, который поступает на первый ключ 54. Следует заметить, что заданная пороговая величина ПР может быть определена исходя из требующегося качества изображения системы декодирования сигнала изображения.
На первом ключе 54 первый сигнал CB1 выбора служит для того, чтобы определить, какие из двух входных данных, т.е. F(i,j) и I(i,j), выбираются и подаются во второй компаратор 56. То есть, если F(i,j) больше, чем верхняя величина - I(i,j)+ПР, тогда выбирается I(i, j) и подается во второй компаратор 56; а в противном случае F(i,j) выбирается и подается во второй компаратор 56.
В вычитателе 55 пороговая величина ПР вычитается из I(i,j) для получения нижней величины, т.е. I(i, j)-ПР, которая поступает во второй компаратор 56. Во втором компараторе 56 нижняя величина (I(i,j)-ПР) сравнивается либо с I(i, j), либо с F(i,j) в зависимости от того, какие данные были выбраны на первом ключе 54, и, таким образом, получают второй сигнал CB2 выбора, который подается на второй ключ 57.
На втором ключе 57 второй сигнал CB2 выбора служит для того, чтобы определить, какие данные следует выбрать из двух данных, поступающих к нему на входы, т. е. F(i,j) или I(i,j) в зависимости от выбора на первом ключе 54, или I(i,j). В случае, если на первом ключе 54 выбраны I(i,j), то на оба входа второго ключа 57 подаются I(i,j), и поэтому в качестве отфильтрованного результата для элемента изображения с заданными координатами после второго ключа 57 получаются I(i,j). В случае, если на первом ключе 54 выбраны F(i,j) и F(i,j) больше или равно нижней величине (I(i,j)-ПР), тогда F(i,j) выбирается на втором ключе 57 в качестве отфильтрованного результата для элемента изображения с заданными координатами; в случае, если на первом ключе 54 выбраны F(i, j) и F(i,j) меньше, чем (I(i,j)-ПP), тогда на втором ключе 57 в качестве отфильтрованного результата для элемента изображения с заданными координатами выбирается I(i,j). Затем отфильтрованный результат для элемента изображения с заданными координатами связывается со вторым запоминающим устройством 42 для хранения кадра, для того чтобы выполнить обновление хранящихся в нем данных элемента изображения с заданными координатами путем замены их на полученный отфильтрованный результат для элемента изображения с заданными координатами.
Операция фильтрации для элемента изображения с заданными координатами может повторяться, при этом данные элемента изображения NxN, включающие обновленные данные элемента изображения с заданными координатами из второго запоминающего устройства 42 для хранения кадра, подаются в фильтр 44, показанный на фиг. 2, и опять выполняется процесс фильтрации. Во время повторной операции фильтрации для элемента изображения с заданными координатами первоначальные данные элемента изображения с заданными координатами, хранящиеся в буфере 48, не обновляются и используются при определении отфильтрованного результата, как описано выше. Фильтрующий блок может быть выполнен так, что для каждого повтора операции фильтрации его характеристики, или другими словами частоты вырезания фильтра, и заданная пороговая величина ПР отличаются друг от друга.
Операция фильтрации для элемента изображения с заданными координатами может повторяться заданное число раз. В другом случае в качестве конечного отфильтрованного результата для элемента изображения с заданными координатами принимается отфильтрованный результат для элемента изображения с заданными координатами, который получен непосредственно перед тем, как абсолютная величина разности между F(i,j) и I(i,j) становится больше, чем ПР. То есть, если абсолютная величина разности между F(i,j) и I(i,j) становится больше, чем ПР, тогда процесс фильтрации прекращается и данные элемента изображения с заданными координатами, хранящиеся во втором запоминающем устройстве 42 для хранения кадра, больше не обновляются.
После того, как операция фильтрации для одного элемента изображения с заданными координатами завершена, операция фильтрации повторяется для следующего элемента изображения с заданными координатами до тех пор, пока все данные элементов изображения текущего кадра, хранящиеся во втором запоминающем устройстве 42 для хранения кадра, не будут обновлены.
На фиг. 4 проиллюстрирована детализированная блок-схема устройства 40 с фильтром заключительной обработки, показанного на фиг.1, согласно второму предпочтительному варианту осуществления настоящего изобретения.
Устройство 40 с фильтром заключительной обработки, которое содержит второе запоминающее устройство 42 для хранения кадра, буфер 48 и три фильтрующих блока 45a, 45b и 45c, фильтрует декодированные данные изображения текущего кадра, поступающие из декодера 20 сигнала изображения, показанного на фиг.1, путем обработки текущего кадра поэлементно, т.е. от одного элемента изображения к другому. Функционирование устройства 40 с фильтром заключительной обработки почти идентично функционированию устройства 40 по первому варианту, показанному на фиг. 2, за исключением того, что процесс фильтрации выполняется в трех фильтрующих блоках 45a-45c. Фильтрующие блоки выполняются так, что их характеристики, или частоты вырезания фильтров, входящих в фильтрующие блоки, и заданная пороговая величина ПР каждого фильтрующего блока, отличаются друг от друга.
Декодированные данные изображения текущего кадра из декодера 20 сигнала изображения сначала запоминаются во втором запоминающем устройстве 42 для хранения кадра. В ответ на управляющий сигнал из системного контроллера (не показан) данные элемента изображения с заданными координатами, т.е. величина элемента изображения, соответствующая элементу изображения с заданными координатами, извлекаются и подаются в буфер 48, а данные для элемента изображения NxN, например 3 х 3, где элементы изображения включают элемент изображения с заданными координатами и соседние с ним элементы изображения, подаются в фильтрующий блок 45a. Работа фильтрующего блока 45a аналогична работе фильтрующего блока 45, для которого были даны пояснения при ссылке на фиг. 2 и фиг. 3.
Отфильтрованный результат для элемента изображения с заданными координатами из фильтрующего блока 45a подается назад во второе запоминающее устройство 42 для хранения кадра для обновления хранящихся в нем данных элемента изображения с заданными координатами путем замены их на отфильтрованный результат для данных элемента изображения с заданными координатами, полученный из фильтрующего блока 45a.
Затем, в ответ на управляющий сигнал из системного контроллера данные элемента изображения для NxN элементов изображения, включающие обновленный элемент изображения с заданными координатами и соседние с ним элементы изображения, подаются в фильтрующий блок 45b. Операция фильтрации в фильтрующем блоке 45b осуществляется с использованием отфильтрованного результата для элемента изображения с заданными координатами из фильтрующего блока 45a и данных элемента изображения для соседних элементов изображения. В остальном операция фильтрации идентична фильтрации, которая выполняется фильтрующим блоком 45a.
Отфильтрованный результат для элемента изображения с заданными координатами из фильтрующего блока 45b подается назад во второе запоминающее устройство 42 для хранения кадра и вместе с данными элементов изображения для соседних элементов изображения связывается с фильтрующим блоком 45c. После аналогичной операции фильтрации в фильтрующем блоке 45c полученный отфильтрованный результат из фильтрующего блока 45c подается назад во второе запоминающее устройство 42 для хранения кадра для обновления в нем данных элемента изображения с заданными координатами. Процесс фильтрации повторяется для всех элементов изображения в текущем кадре, затем полученный в результате фильтрации текущий кадр, хранящийся во втором запоминающем устройстве 42 для хранения кадра, поступает на дисплейный модуль.
Несмотря на то, что проиллюстрированное устройство 40 с фильтром заключительной обработки включает три фильтрующих блока, очевидно, что содержащихся в нем фильтрующих блоков может быть любое число.
Кроме того, работа фильтрующих блоков может быть модифицирована аналогично тому, как было описано со ссылкой на фиг. 2. То есть, вместо выполнения процесса фильтрации заданное число раз, например 3, в качестве окончательного отфильтрованного результата для элемента изображения с заданными координатами может быть принят отфильтрованный результат для элемента изображения с заданными координатами, полученный непосредственно перед тем, как абсолютная величина разности между F(i,j) и I(i,j) станет больше, чем величина ПР. Например, если абсолютная величина разности между F(i,j) и I(i,j) становится больше, чем ПР на фильтрующем блоке 45b, тогда процесс фильтрации прекращается и отфильтрованный результат, полученный на фильтрующем блоке 45a, устанавливается в качестве окончательного отфильтрованного результата для изображения с заданными координатами.
Настоящее изобретение позволяет значительно уменьшить или устранить эффект объединения в блоки, проявляющийся на границе блоков декодированных данных изображения, путем эффективного выполнения фильтрации на стадии заключительной обработки, благодаря чему улучшается качество изображения.
Несмотря на то, что настоящее изобретение было показано и раскрыто на примере конкретных вариантов осуществления изобретения, для специалистов в данной области техники очевидно, что могут быть выполнены различные многочисленные изменения и модификации, не изменяя сущности и не выходя за рамки объема изобретения, как оно определено в прилагаемой формуле изобретения.
Реферат
Изобретение относится к технике телевидения, в частности к средствам декодирования сигнала изображения. Достигаемый технический результат - улучшение качества изображения. Устройство содержит запоминающее устройство (ЗУ) для хранения декодированных данных текущего кадра, буфер для хранения данных элементов изображения с заданными координатами, средство для фильтрации данных элемента изображения с заданными координатами, средство для суммирования заданной пороговой величины с данными элемента изображения с заданными координатами для получения верхней величины, средство для сравнения отфильтрованных данных с верхней величиной для получения первого сигнала выбора, первое средство для выбора в ответ на первый сигнал выбора данных элемента изображения с заданными координатами, хранящихся в буфере, или отфильтрованных данных элемента изображения с заданными координатами, средство для вычитания заданной пороговой величины из данных элемента изображения с заданными координатами для получения нижней величины, второе средство сравнения данных с нижней величиной для получения второго сигнала выбора, второе средство выбора для выбора данных элемента с заданными координатами, выбранных в первом средстве, и средство обновления данных, хранящихся в ЗУ, путем замены их на отфильтрованный результат. 3 с. и 4 з.п. ф-лы, 4 ил.
Комментарии