Кистевой протез и устройство для передачи усилий - RU2416379C2
Код документа: RU2416379C2
Чертежи







Описание
Изобретение относится к кистевому протезу с основанием, на котором, по меньшей мере, один пальцевый протез шарнирно установлен с возможностью движения вокруг, по меньшей мере, одной оси поворота посредством привода, соединенного с ним через устройство для передачи усилий, а также к устройству для передачи усилий как таковому.
После ампутации кисти или ее полного отделения от руки в результате несчастного случая внешний вид и частично функция кисти могут быть восстановлены посредством кистевого протеза. Для этого он должен быть способен перемещать по отношению друг к другу захватные устройства, которые могут быть выполнены в виде имитаций пальцев, чтобы обеспечить взятие предмета.
Помимо двухпальцевого захвата, известного из US 2004/0015240 А1, предложены кистевые протезы, располагающие приводом, который через коническую зубчатую передачу жестко соединен с основанием кисти. При этом в зависимости от направления вращения привода пальцевые протезы сходятся или расходятся. Этот привод может управляться миоэлектрическими сигналами. Такой кистевой протез описан в US 2005/0021154 А1. Он мало напоминает естественную кисть.
Задачей настоящего изобретения является создание кистевого протеза и устройства для передачи усилий, которые позволили бы создать приближенные к внешнему виду естественной кисти форму и функцию.
Согласно изобретению, эта задача решается посредством кистевого протеза с признаками п.1 и устройства для передачи усилий с признаками п.9 формулы. Предпочтительные варианты и модификации изобретения описаны в зависимых пунктах.
Кистевой протез с основанием, на котором, по меньшей мере, один пальцевый протез шарнирно установлен с возможностью движения вокруг, по меньшей мере, одной оси поворота посредством привода, соединенного с ним через устройство для передачи усилий, предусматривает, что устройство для передачи усилий между приводом и пальцевым протезом выполнено податливым при нажиме или изгибно-упругим и жестким на растяжение. В то время как традиционные кистевые протезы предусматривают жесткую связь между приводом и пальцевым протезом, податливая при нажиме или изгибно-упругая связь привода с пальцевым протезом обеспечивает то, что при сжимающей нагрузке на устройство для передачи усилий, т.е. при воздействии усилия, вызывающего смыкание пальцевых протезов или уменьшение угла между пальцевым протезом и основанием кисти, пальцевый протез подается и помимо имитации естественного пальца вызывает также защиту механических компонентов. Защита компонентов обусловлена тем, что на привод косвенно через устройство для передачи усилий передаются порой значительные усилия, возникающие при случайном ударе пальцевых протезов о предметы. Напротив, благодаря изгибно-упругому, преимущественно спружинивающему выполнению устройства для передачи усилий обеспечиваются смещение и преобразование действующих на пальцевый протез усилий в движение. Это движение может длиться вплоть до максимального угла изгиба пальцевого протеза.
Чтобы гарантировать беспрепятственное и надежное, а также точное движение сгибания пальцевого протеза из открытого основного положения, устройство для передачи усилий выполнено жестким на растяжение, т.е. растягивающие усилия передаются, по возможности, без растяжения устройства для передачи усилий. Для этого предусмотрено, что устройство для передачи усилий содержит предпочтительно тросовый, прядевый или волокнистый компонент, через который передаются растягивающие усилия. Этот компонент может быть изготовлен из проволочного троса или высокопрочных волокон, таких как углеволокно, арамид или стекловолокно. Помимо этого могут найти применение другие искусственные или природные волокна. Чтобы от привода на пальцевый протез могли передаваться высокие растягивающие усилия, тросовый, прядевый или волокнистый компонент выполнен в виде замкнутой петли. В качестве альтернативы возможно выполнение открытой или перекрученной петли. Соединение обоих открытых концов троса или пряди или закрепление в остальном материале или на приводе или пальцевом протезе может осуществляться за счет скручивания, сращивания или склеивания. Если ниже речь идет о тросовом компоненте, то сюда входят волокнистые или прядевые компоненты.
Один вариант осуществления изобретения предусматривает, что устройство для передачи усилий содержит эластомерный компонент, благодаря которому можно регулировать изгибную упругость устройства для передачи усилий в широком диапазоне. За счет подходящего выбора эластомерного материала, который предпочтительно, по меньшей мере, частично охватывает или полностью размещает в себе тросовый компонент, возможно изготовление формоустойчивого в исходном положении тела, которое, с одной стороны, благодаря включенному тросовому компоненту обладает очень высокими растягивающими усилиями, а с другой стороны, благодаря эластомерному компоненту - желаемой изгибно-упругой и упругой при сжатии характеристикой.
В качестве альтернативы устройство для передачи усилий может быть выполнено в виде пружиняще-демпфирующего блока, в частности в виде пневмоблока, в котором в случае сжимающей нагрузки сжимается воздушный объем, который после снятия сжимающего усилия расширяется и вызывает обратное смещение пневмопоршня и, тем самым, пальцевого протеза. В качестве альтернативы устройство для передачи усилий может быть выполнено в виде пружины, которая, при необходимости, натяжена.
Для связи устройства для передачи усилий с приводом и пальцевым протезом предусмотрены опорные втулки, заделанные в устройство для передачи усилий. Предпочтительно эти опорные втулки окружены эластомерным элементом или эластомерным компонентом и находятся внутри тросового или волокнистого компонента, в частности внутри тросовой или волокнистой петли.
Чтобы реализовать возвратное движение пальцевого протеза, согнутого в направлении внутренней поверхности основания кисти, устройство для передачи усилий выполнено пружиняще-упругим, так что пальцевый протез без нагружения растягивающим усилием за счет привода или связанного с ним передаточного элемента возвращается в исходное положение. Оно соответствует предпочтительно слегка раскрытой кисти. Таким образом, устройство для передачи усилий способно передавать ограниченное сжимающее усилие. За счет соответствующего сочленения или выполнения устройства для передачи усилий может быть обеспечено небольшое избыточное выпрямление пальцевых протезов из основного положения. Усилие пружины устройства для передачи усилий рассчитано при этом так, что при его нагружении сжимающим усилием, т.е. при повороте пальцевого протеза в направлении внутренней поверхности основания кисти, происходит возврат пальцевого протеза в исходное положение. Возвратное усилие должно быть при этом настолько большим, чтобы преодолеть удерживающие силы и силы трения внутри кистевого протеза.
Один вариант осуществления изобретения предусматривает, что в одном общем месте опоры установлены несколько устройств для передачи усилий, а место опоры выполнено с возможностью смещения к осям поворота пальцевых протезов для обеспечения их сгибания. Общее место опоры может быть расположено непосредственно на приводе или на ведомом элементе редуктора. За счет общей опоры может быть облегчена синхронность сгибательных движений.
Точно также два устройства для передачи усилий могут быть соединены между собой посредством общего тросового, волокнистого или прядевого компонента, причем он расположен в общем месте опоры и на разных пальцевых протезах. Тросовый, волокнистый или прядевый компонент передает тогда растягивающее усилие, создаваемое приводом через общее место опоры за счет смещения относительно осей поворота пальцевых протезов, на пальцевые протезы и вызывает их сгибание. При этом тросовый, волокнистый или прядевый компонент может скользить в месте опоры вдоль него, обеспечивая, таким образом, равномерное сгибание обоих соединенных между собой пальцевых протезов.
Устройства для передачи усилий могут быть закреплены на балансире, установленном в общем месте опоры. Они могут быть закреплены на балансире на разных расстояниях от общего места опоры, чтобы обеспечить согласование смещения соответствующих пальцевых протезов с геометрическими условиями внутри кистевого протеза или с эксплуатационными условиями.
Устройства для передачи усилий могут быть выполнены изгибно-упругими в нескольких направлениях, так что при сжимающей нагрузке в направлении продольной оси места опоры могут смещаться по отношению друг к другу. Сгибаемое во все стороны устройство для передачи усилий действует тогда как шаровой шарнир и компенсирует отклонения от идеального осевого положения. При необходимости, можно отказаться от вращаемой вокруг осей опоры.
Устройство для передачи усилий от привода кистевого протеза на шарнирно установленный на основании кисти пальцевый протез выполнено, как это описано выше, и обеспечивает легкую и недорогую связь привода и пальцевого протеза, а также эффективную передачу растягивающих усилий. Кроме того, с помощью устройства для передачи усилий достигаются податливая против случайной нагрузки опора и простой возврат в исходное положение.
Ниже со ссылкой на прилагаемые чертежи более подробно поясняется пример осуществления изобретения. Одинаковые элементы на разных чертежах обозначены одинаковыми ссылочными позициями. На чертежах изображают:
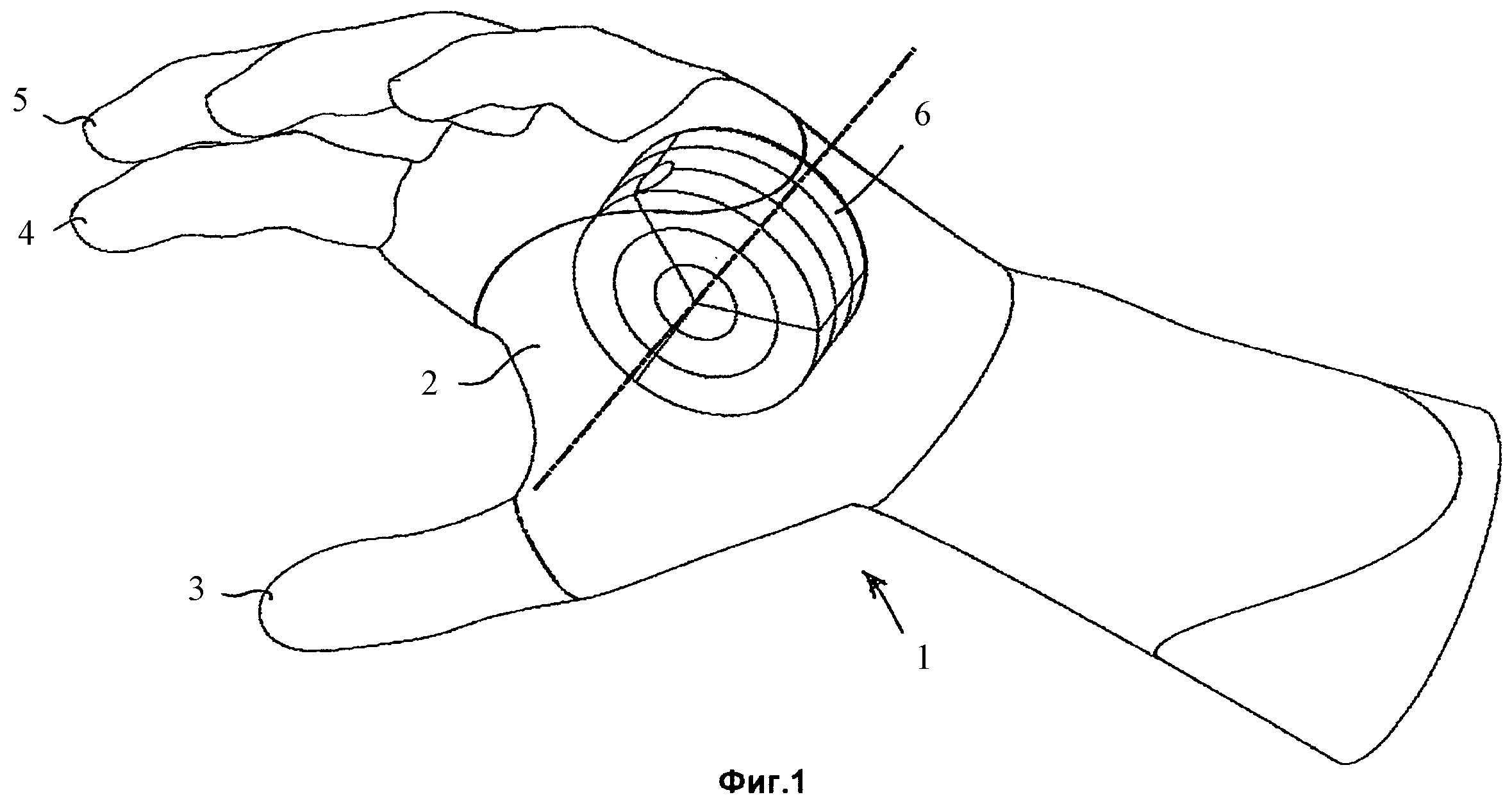
- фиг.1: схематичный вид кистевого протеза;
- фиг.2: схематичный частичный вид функционального строения кистевого протеза;
- фиг.3a-3d: устройство для передачи усилий в разных видах;
- фиг.4: подробный вид балансира;
- фиг.5: подробный вид из фиг.2;
- фиг.6: вариант фиг.5.
На фиг.1 изображен кистевой протез 1, состоящий из основания 2 и, по меньшей мере, трех шарнирно установленных на основании 2 пальцевых протезов 3, 4, 5. Они соответствуют большому, указательному и среднему пальцам естественной кисти. Подвижной и активируемой посредством привода 6 опоры этих трех пальцевых протезов 3, 4, 5 достаточно для выполнения кистью большого числа хватательных функций. Оба остальных пальца, безымянный и мизинец, могут двигаться пассивно заодно с ними и состоять из эластомерного материала для достижения как можно более естественного внешнего вида. Внутри основания 2 установлен привод 6 в виде электродвигателя с соответствующей передачей. Также внутри основания 2 может быть расположен источник энергии для привода 6. Управление приводом 6 осуществляется блоком управления, который также может быть расположен в основании 2. Соответствующие сигналы могут вырабатываться посредством дистанционного управления или представлять собой миоэлектрические сигналы.
На фиг.2 схематично показан принцип действия кистевого протеза 1. На основании 2 с возможностью поворота вокруг шарнирных осей 15 установлены три пальцевых протеза 3, 4, 5. Посредством устройств 10 для передачи усилий, конструкция которых подробно описана ниже, пальцевые протезы 3, 4, 5 соединены с вращающимся диском 7, приводимом электродвигателем 6. Устройства 10 установлены на вращающемся диске 7 на осях 16 либо непосредственно, либо посредством балансира 8. Указательный 4 и средний 5 пальцы связаны между собой посредством балансира 8, установленного с возможностью вращения на вращающемся диске 7. Последний установлен непосредственно на ведомом валу привода 6 или на выходном валу редуктора. При активировании привода 6 вращающийся диск 7 движется на соответствующий угол. В результате оси 16 смещаются относительно осей 15 поворота пальцевых протезов 3, 4, 5, что за счет жесткого на растяжение выполнения устройств 10 и отстоящего от осей 15 вращения сочленения устройств 10 с пальцевыми протезами 3, 4, 5 приводит к повороту последних. При реверсировании привода 6 и движении вращающегося диска 7 в положение, в котором оси 16 минимально удалены от осей 15 поворота пальцевых протезов 3, 4, 5, достигается раскрытое исходное положение. За счет пружиняще-упругих свойств устройств 10 пальцевые протезы 3, 4, 5 движутся тогда в свое раскрытое исходное положение. При этом предусмотрено, что устройства 10 могут передавать растягивающие усилия, существенно более высокие, чем сжимающие усилия. Это соответствует физиологическим условиям естественной кисти, которая при смыкании может прикладывать существенно большие усилия, чем при раскрытии. Для наглядности безымянный палец и мизинец не показаны; они могут быть пассивно сочленены со средним пальцем 5 и за счет этого двигаться заодно с ним.
На фиг.3 в разрезе изображено устройство 10 для передачи усилий. Оно состоит из тросового или волокнистого компонента 11, выполненного в данном случае в виде петли. Тросовый компонент 11 может состоять из нескольких прядей или отдельных петель или в виде стального или пластикового троса из другого высокопрочного волокнистого материала. Тросовый компонент 11 заделан в эластомерный компонент 12, в результате чего устройство 10 становится формоустойчивым, однако изгибно-упругим. Эластомерный компонент 12 может состоять из силикона, каучука или другого эластичного материала. Несмотря на формоустойчивость, за счет изгибаемости тросового или волокнистого компонента 11 и упругой при сжатии или изгибно-упругой характеристики эластомерного компонента 12 возможна деформация, в частности изгибание, на основе действующих на устройство 10 сжимающих усилий. В результате связанные с приводом 6 или вращающимся диском 7 посредством устройства 10 пальцевые протезы 3, 4, 5 могут смещаться в направлении внутренней поверхности основания кисти, причем при отсутствии соответствующего встречного усилия происходит обратное смещение за счет пружиняще-упругой характеристики устройств 10.
Внутри выполненного в виде петли тросового или волокнистого компонента 11 расположены две опорные втулки 13, 14, которые также заделаны в эластомерный компонент 12, например силикон. Опорные втулки 13, 14 установлены на соответствующих осях пальцевых протезов 3,4, 5 и на осях 16 вращающегося диска 7 или балансира 8. Опорные втулки 13, 14 выполнены, например, из бронзы для образования опоры скольжения с соответствующими осями 16. Для наглядности связующие оси пальцевых протезов 3, 4, 5 не показаны. Эти связующие оси расположены на расстоянии от осей 15 вращения, так что при приложении растягивающих усилий через устройства 10 создается момент вокруг осей 15 вращения, что приводит к соответствующему смещению пальцевых протезов 3,4, 5.
На фиг.3b, 3с видно, что оси вращения опорных втулок 13, 14 перпендикулярны друг другу, что обосновано конкретным расположением вращающегося диска 7 и расположенных на нем или приданных ему осей 16. Оси вращения опорных втулок 13, 14 могут быть ориентированы также параллельно или под углом друг к другу.
Также на фиг.3а-3с видно, что тросовый или волокнистый компонент 11 полностью заделан в эластомер 12, в результате чего, с одной стороны, тросовый или волокнистый компонент 11 защищен от внешних влияний, а с другой стороны, повышается формоустойчивость устройства 10. На фиг.3d изображена деформированная форма устройства 10, которое было нагружено на сжатие в продольном направлении и изогнулось. Опорная втулка 14 не находится больше под прямым углом к опорной втулке 13, как это показано на фиг.3а-3с, а в результате деформации вызывает наклон опорных втулок 13, 14 по отношению друг к другу и, тем самым, осей 15, 16 вращения. Вследствие упругой деформируемости устройство 10 действует в нескольких направлениях как шаровой шарнир и может компенсировать также наклоны осей, например, за счет производственных допусков.
В качестве альтернативы изображенному варианту устройство 10 может быть изготовлено также в виде другого, податливого при сжатии, например пружиняще-упругого и жесткого на растяжение элемента, например пружинящего изгибающегося или отклоняющегося стержня или соответственно сконструированной проволочной петли.
За счет упругой при сжатии опоры не происходит непосредственной передачи ударных усилий через пальцевые протезы 3, 4, 5 на привод 6 или вращающийся диск 7. Напротив, случайные толчковые движения демпфируются и гасятся. Помимо естественного внешнего вида кистевого протеза 1 это повышает также срок службы опор и компонентов привода, например, при падении.
В качестве альтернативы изображенному варианту устройство 10 также в виде пружиняще-демпфирующего блока может быть оснащено соответствующим управлением, например посредством пневмо- или гидроцилиндра с соответствующим клапанным управлением, который может эффективно передавать растягивающие усилия, а в случае сжимающих усилий предусматривает упругую податливость. Пневматическое выполнение вызывает обратное смещение согнутых внутрь пальцевых протезов.
При достаточно изгибно-упругом выполнении тросового компонента эластомерный компонент может быть ненужен; при достаточной прочности на растяжение эластомерного компонента он может быть выполнен также в виде единственного устройства для передачи усилий.
На фиг.4 в увеличенном виде изображен балансир 8. Он имеет общее место 18 опоры в виде втулки, которая может быть надета на соответствующую ось на вращающемся диске 7 (не показан). Балансир 8 может быть установлен на этой оси с возможностью вращения вокруг общего места 18 опоры и имеет на осях 16 вращения места закрепления устройств 10 (не показаны). Расстояния a, b осей 16 вращения или мест закрепления от центра вращения общего места 18 опоры могут быть разными, чтобы можно было учесть геометрические или механические условия внутри кистевого протеза.
На фиг.5 в увеличенном виде изображен фрагмент фиг.2. Одинаковые элементы обозначены одинаковыми ссылочными позициями. Видно, что посредством балансира 8 в общем месте 18 опоры установлены два устройства 10 для передачи усилий, выполненные отдельно. В качестве альтернативы варианту на фиг.5 устройства 10 могут быть установлены в общей точке опоры или на общей оси также без балансира 8 на вращающемся диске 7. Приданные пальцевым протезам 4, 5 опорные втулки 14 расположены, в основном, под прямым углом к осям 16 вращения на балансире 8, однако, как в указательном пальце 4, могут быть ориентированы также наискось.
На фиг.6 изображен вариант выполнения из фиг.5, в котором тросовый компонент 11 выполнен в виде открытой петли, закрепленной на опорных втулках 14, например, сваркой или клеем. Тросовый компонент 11 соединяет обе опорные втулки 14 протезов 4, 5 указательного и среднего пальцев, причем он частично заделан в эластомерный компонент устройств 10 для передачи усилий. В зоне балансира 8 тросовый компонент 11 огибает общее место 18 опоры или ось вращения вращающегося диска 7 и воспринимает растягивающие усилия за счет смещения общего места 18 опоры относительно осей 15 вращения. Эти растягивающие усилия передаются тросовым компонентом 11 на опорные втулки 14 и за счет их удаленного по отношению к осям 15 расположения создают момент вокруг последних, в результате чего пальцевые протезы 4, 5 сгибаются.
Реферат
зобретение относится к медицинской технике, а именно к протезу кисти. Кистевой протез с основанием, на котором, по меньшей мере, один пальцевый протез шарнирно установлен с возможностью движения вокруг, по меньшей мере, одной оси поворота посредством привода, соединенного с ним через устройство (10) для передачи усилий. Устройство (10) для передачи усилий выполнено между приводом (6) и пальцевым протезом (3, 4, 5) жестким на растяжение и податливым при нажиме. Устройство (10) для передачи усилий содержит тросовый или волокнистый компонент (11) или прядь, а также опорные втулки (13, 14) для размещения осей (15, 16), приданных основанию (2) кисти и пальцевому протезу (3, 4, 5). Оси поворота опорных втулок перпендикулярны относительно друг друга. Технический результат - приближение формы и функция протеза к естественной кисти. 8 з.п. ф-лы, 9 ил.
Комментарии