Система видеонаблюдения - RU2753496C1
Код документа: RU2753496C1
Чертежи
Описание
Предложенное на рассмотрение изобретение относится к системе видеонаблюдения и к способу обнаружения ошибки в системе видеонаблюдения и, в частности, к устойчивой в отношении ошибок конструкции системы камер грузовых транспортных средств.
Постоянное совершенствование технологии видеосенсоров и визуального отображения позволяет всё чаще заменять известные приборы косвенного визуального отображения в транспортных средствах. Так, вместо традиционных зеркал, всё чаще используются системы видеонаблюдения или системы отображения посредством камер, которые заменяют зеркала и допускают возможность повышения качества визуализации, а также дополнительной функциональности, к примеру, изменение масштаба изображения или перекрытия изображений на дисплеях. Дальнейшая мотивация для использования систем видеонаблюдения состоит в том, что используемые камеры сравнительно малы и, таким образом, сопротивление воздуха уменьшается. Используемые в противном случае зеркала из-за своих габаритов формируют значительную поверхность, подверженную воздействию ветра, и обуславливают, тем самым, существенно больший расход моторного топлива.
Несмотря на то что новые технологии предоставляют много возможностей, они предполагают также возникновение целого ряда новых источников ошибок. В то время как при использовании традиционных зеркал заднего вида качество обзора может быть снижено вследствие повреждения стекла или загрязнения поверхности, системы видеонаблюдения содержат много компонентов, которые обуславливают большое количество других источников ошибок. Ситуация ухудшается далее за счёт того, что зачастую достаточно ошибки лишь в одной части системы, чтобы сделать всю систему недееспособной, так что в качестве оценки регистрация зоны заднего вида водителем транспортного средства становится более невозможна. Так, к примеру, может быть нарушено энергоснабжение, или может иметь место ошибка программного обеспечения, или может быть повреждён электрический контакт, чтобы вывести всю систему из строя.
Поэтому важно, чтобы системы видеонаблюдения были оснащены подходящей системой управления ошибками, чтобы самостоятельно при возникновении ошибки гарантировать, что водитель и далее будет получать информацию по зоне заднего вида или по боковой зоне транспортного средства.
Известные системы видеонаблюдения описаны, к примеру, в US 2017/282801, в US 2017/274827 А1, в EP 3 231 668 А1, в US 2015/165975 А1. Причём описанные там системы допускают использование зеркал через камеры, однако, у этих систем даже простая ошибка в подсистеме может приводить к отказу всей системы. Такой отказ при использовании персонального автомобиля не является критическим в той мере, как при использовании грузового транспортного средства, так как водитель персонального автомобиля всегда может также визуально контролировать боковые и заднюю зоны. В грузовом транспортном средстве это исключено, так как водитель не может визуально контролировать, к примеру, сторону пассажира, если в распоряжении не имеется зеркал или исправно работающей системы камер.
Поэтому имеет место необходимость в системе видеонаблюдения, которая подходит для грузовых транспортных средств и предполагает высокую степень надёжности, чтобы, таким образом, иметь возможность заменить зеркала заднего вида.
По меньшей мере, одна часть этих проблем решается при помощи системы видеонаблюдения по п. 1, грузового транспортного средства по п. 12 и способа по п. 13 формулы изобретения. Зависимые пункты формулы изобретения определяют другие предпочтительные варианты осуществления предметов изобретения независимых пунктов формулы изобретения.
Предложенное на рассмотрение изобретение относится к системе видеонаблюдения для, по меньшей мере, одной боковой зоны на стороне пассажира грузового транспортного средства. Система видеонаблюдения содержит:
- первый блок обработки изображений,
- первый блок камеры для регистрации визуальных данных, по меньшей мере, одной боковой зоны, причём первый блок камеры предоставляет визуальные данные в распоряжение для обработки первому блоку обработки изображений,
- второй блок обработки изображений,
- второй блок камеры для регистрации других визуальных данных, по меньшей мере, одной боковой зоны, причём второй блок камеры предоставляет другие визуальные данные в распоряжение для обработки второму блоку обработки изображений.
Первый блок обработки изображений и второй блок обработки изображений выполнены с возможностью независимо друг от друга обрабатывать визуальные данные и, таким образом, обеспечивать возможность дублированной регистрации изображений для, по меньшей мере, одной боковой зоны.
Система видеонаблюдения является, в частности, системой отображения посредством камер, которая пригодна для того, чтобы заменить имеющиеся зеркала заднего вида на грузовом транспортном средстве. Он рассчитана, поэтому, в частности, для боковой регистрации изображений, чтобы наглядно отображать пространство, окружающее транспортное средство. При этом понимается, что примеры осуществления не должны быть ограничены применением на грузовых транспортных средствах. Система видеонаблюдения может быть использована также и для других транспортных средств.
Дополнительно система видеонаблюдения содержит третий блок камеры, выполненный с возможностью регистрации визуальных данных следующей боковой зоны на стороне водителя грузового транспортного средства. Третий блок камеры предоставляет визуальные данные в распоряжение для обработки первому блоку обработки изображений. Дополнительно система видеонаблюдения содержит четвёртый блок камеры, выполненный с возможностью регистрации визуальных данных следующей боковой зоны на стороне водителя грузового транспортного средства. Четвёртый блок камеры предоставляет визуальные данные в распоряжение для обработки второму блоку обработки изображений. При этом понимается, что третий блок камеры может предоставлять визуальные данные в распоряжение также и второму блоку обработки изображений, а четвёртый блок камеры может предоставлять визуальные данные в распоряжение также и первому блоку обработки изображений.
Дополнительно система видеонаблюдения содержит первый блок индикации для отображения обработанных визуальных данных с первого блока обработки изображений. Система видеонаблюдения может содержать, кроме того, второй блок индикации для отображения обработанных визуальных данных со второго блока обработки изображений.
Дополнительно система видеонаблюдения содержит линию передачи данных между первым блоком обработки изображений и вторым блоком обработки изображений, причём первый блок обработки изображений и второй блок обработки изображений выполнены с возможностью передавать полученные визуальные данные посредством линии передачи данных. Визуальные данные могут обмениваться между блоками обработки изображений постоянно или лишь при наличии определённой ситуации (к примеру, установленной ошибки или по запросу).
Дополнительно первый блок обработки изображений и/или второй блок обработки изображений выполнены с возможностью сравнивать визуальные данные перекрываемых зон регистрации и, основываясь на этом, обнаруживать ошибку системы видеонаблюдения. При сравнении могут быть установлены, к примеру, отклонения, или замершие изображения, или другие неожиданные помехи. При установлении ошибки может быть выдано предупреждение или же визуальные данные с повреждённого блока обработки изображений могут быть перенаправлены на исправный блок обработки изображений. Перекрытыми зонами регистрации могут быть любые зоны из окружающего грузовое транспортное средство пространства (могут содержать также дорожную разметку), которые были зарегистрированы различными блоками камер. Чтобы иметь возможность сравнивать перекрытые зоны, дополнительно сначала может быть осуществлена трансформация изображений, к примеру, для исключения искажений использованных объектов (к примеру, с объектива по типу «рыбий глаз»).
Дополнительно первый блок камеры имеет широкоугольный объектив или объектив по типу «рыбий глаз», чтобы при размещении на передней угловой зоне грузового транспортного средства одновременно регистрировать переднюю зону перед грузовым транспортным средством и, по меньшей мере, одну боковую зону на стороне пассажира. Также четвёртый блок камеры может иметь широкоугольный объектив или объектив по типу «рыбий глаз», чтобы при размещении на передней угловой зоне грузового транспортного средства одновременно регистрировать переднюю зону и боковую зону на стороне водителя. Кроме того, первый блок обработки изображений и/или второй блок обработки изображений может быть выполнен с возможностью / могут быть выполнены с возможностью производить трансформацию визуальных данных с первого блока камеры и/или второго блока камеры, для уменьшения искажений в горизонтальных зонах изображений (зоны кромок изображения). Таким образом, при выходе их строя второго блока камеры или третьего блока камеры регистрация изображения заднего вида может быть обеспечена посредством первого и/или четвёртого блока камеры. За счёт трансформации изображений искажения на внешнем крае при регистрации посредством объектива по типу «рыбий глаз» должны быть устранены или уменьшены, так чтобы водитель мог видеть объективы. Также первый блок обработки изображений и/или второй блок обработки изображений могут быть выполнены с возможностью идентифицировать дорожную разметку в визуальные данные первого блока камеры, и/или второго блока камеры, и/или третьего блока камеры, и/или четвёртого блока камеры, к примеру, для поддержания отслеживания полос движения.
Дополнительно первый блок камеры и четвёртый блок камеры дополнительно выполнены с возможностью регистрировать нижние зоны перед и рядом с кабиной водителя, чтобы таким образом обеспечивать возможность дублированной регистрации нижней зоны перед кабиной водителя. Нижние зоны (или зоны работы датчиков) отображают поверхности на дороге, которые могут быть зарегистрированы посредством камер.
Дополнительно боковая зона (на стороне пассажира) и другая боковая зона (на стороне водителя) имеют на соответствующей стороне, по меньшей мере, одну определяемую следующим образом первую нижнюю зону: начинаясь от первой линии, которая проходит перпендикулярно направлению движения грузового транспортного средства и на 4 м смещена назад от положения водителя транспортного средства, первая нижняя зона с переменной шириной располагается сбоку параллельно краю транспортного средства в направлении назад. Переменная ширина увеличивается до расстояния 26 м от первой линии линейно от 1 м на ширину 5 м, а затем остаётся постоянной.
Дополнительно боковая зона (на стороне пассажира) и другая боковая зона (на стороне водителя) имеют на соответствующей стороне, по меньшей мере, одну определяемую следующим образом вторую нижнюю зону: начинаясь от второй линии, которая проходит перпендикулярно направлению движения грузового транспортного средства и на 1,5 м смещена назад от положения водителя транспортного средства, вторая нижняя зона с переменной шириной располагается сбоку параллельно краю транспортного средства на длину 23,5 м в направлении назад. Переменная ширина увеличивается до расстояния 8,5 м от второй линии линейно от 4,5 м на ширину 15 м, а затем остаётся постоянной.
Дополнительно боковая зона (на стороне пассажира) и другая боковая зона (на стороне водителя) имеют на соответствующей стороне, по меньшей мере, одну определяемую следующим образом третью нижнюю зону: начинаясь от третьей линии, которая проходит перпендикулярно направлению движения грузового транспортного средства через положение водителя транспортного средства, третья нижняя зона проходит на 1,75 м назад и на 1 м вперёд на ширину 2 м параллельно краю транспортного средства.
Дополнительно передняя зона имеет определяемую следующим образом четвёртую нижнюю зону: начинаясь от переднего ограничения транспортного средства, четвёртая нижняя зона проходит на, по меньшей мере, 2 м перед общей шириной кабины водителя и сбоку на 2 м за пределы стороны пассажира. Дополнительно передний угол на выступающем сбоку участке закруглён с радиусом 2 м.
Предложенное на рассмотрение изобретение относится также к грузовому транспортному средству с описанной ранее системой видеонаблюдения.
Предложенное на рассмотрение изобретение относится также к способу обнаружения ошибки системы видеонаблюдения. Способ включает в себя следующие этапы:
- сравнение визуальных данных перекрываемых зон изображений, которые были зарегистрированы различными блоками камер, и
- обнаружение ошибки в системе видеонаблюдения, на основании сравнения.
Дополнительно сравнение включает в себя, по меньшей мере, один пункт из последующих:
- обнаружение несогласования перекрываемых зон изображений,
- обнаружение замершего изображения, которое было зарегистрировано одним из блоков камер,
- трансформирование визуальных данных, с целью уменьшения искажения объективов по типу «рыбий глаз» или широкоугольных объективов.
Этот способ или, по меньшей мере, его части могут быть реализованы или сохранены также в форме инструкций в программном обеспечении или в программном продукте компьютера, причём сохранённые инструкции могут осуществлять этапы в соответствии со способом, если способ осуществляется на процессоре. Поэтому, предложенное на рассмотрение изобретение относится также к компьютерному программному продукту с сохранённым на нём кодом программного обеспечения (инструкции программного обеспечения), который осуществлён для проведения одного из описанных способов, если программное обеспечение выполняется посредством блока обработки данных. Блоком обработки данных может быть любая форма компьютера или блока управления, которая имеет соответствующий микропроцессор, который может выполнять код программного обеспечения.
Вышеуказанные проблемы решаются посредством примеров осуществления за счёт системы видеонаблюдения, у которой первый блок камеры посылает визуальные данные на первый блок обработки изображений, а второй блок камеры посылает визуальные данные на второй блок обработки изображений, причём первый блок обработки изображений и второй блок обработки изображений независимо друг от друга обрабатывают визуальные данные и независимо друг от друга подают их на дисплей. Первый блок обработки изображений и второй блок обработки изображений могут представлять собой, следовательно, отдельные блоки, которые причём могут быть интегрированы в один блок, однако, не оказывают влияния друг на друга, так что выход из строя одного из двух блоков обработки изображений не оказывает негативных воздействий на другой блок обработки изображений. В предпочтительном варианте между первым блоком обработки изображений и вторым блоком обработки изображений предусмотрена линия передачи данных, которая, по меньшей мере, при выходе из строя одного из двух блоков обработки изображений служит для того, чтобы перенаправлять визуальные данные на соответствующий исправный блок обработки изображений, чтобы соответствующие изображения могли быть отображены там. Поэтому, примеры осуществления предлагают, по меньшей мере, для стороны пассажира устойчивую в отношении ошибок и дублирующую систему.
Примеры осуществления предложенного на рассмотрение изобретения станут более понятны на основании последующего детального описания и приложенных чертежей различных примеров осуществления, которые, однако, не должны пониматься как примеры, которые ограничивают выявление посредством специфических вариантов осуществления, а служат лишь для разъяснения и понимания:
фиг. 1 - демонстрирует систему видеонаблюдения в соответствии с примером осуществления предложенного на рассмотрение изобретения,
фиг. 2 - демонстрирует другие дополнительные компоненты системы видеонаблюдения с фиг. 1,
фиг. 3А, 3В - отображают нижние зоны, которые в соответствии с примерами осуществления одновременно регистрируются вторым блоком камеры,
фиг. 4А, 4В - отображают нижние зоны, которые в соответствии с примерами осуществления одновременно регистрируются первым блоком камеры,
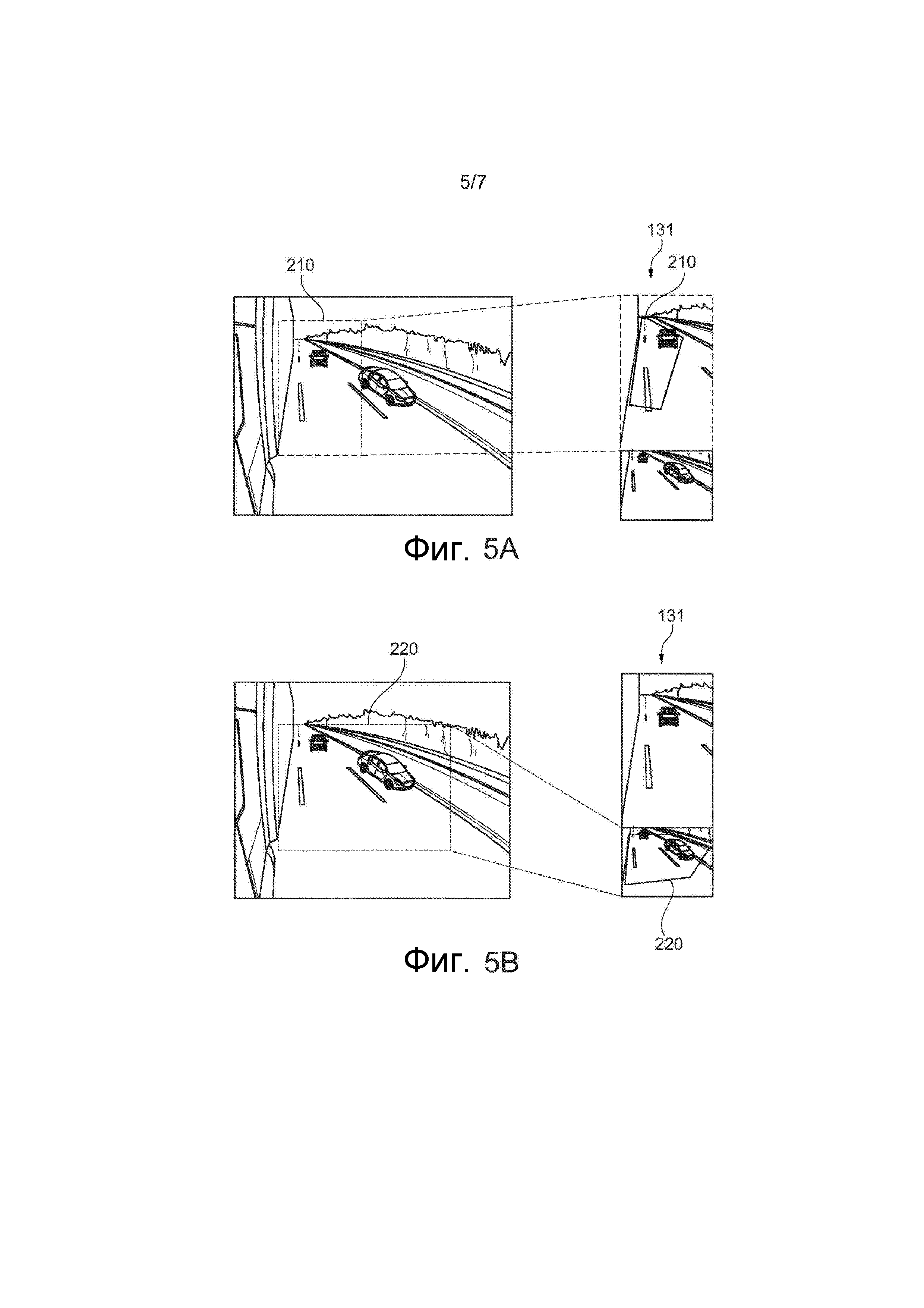
фиг. 5А, 5В - демонстрируют изображение для нижних зон с фиг. 3А, 3В,
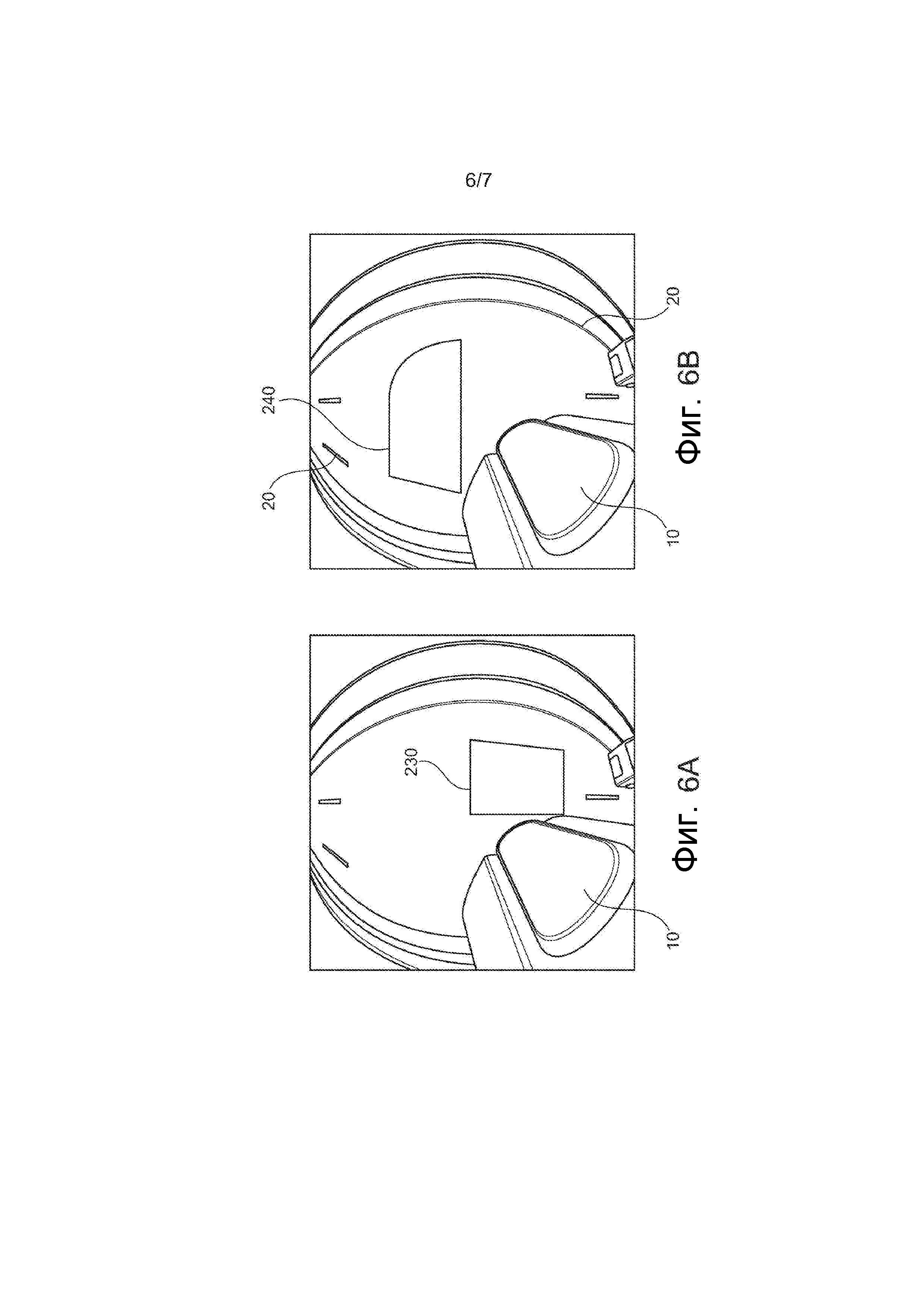
фиг. 6А, 6В - демонстрируют изображение для нижних зон с фиг. 4А, 4В,
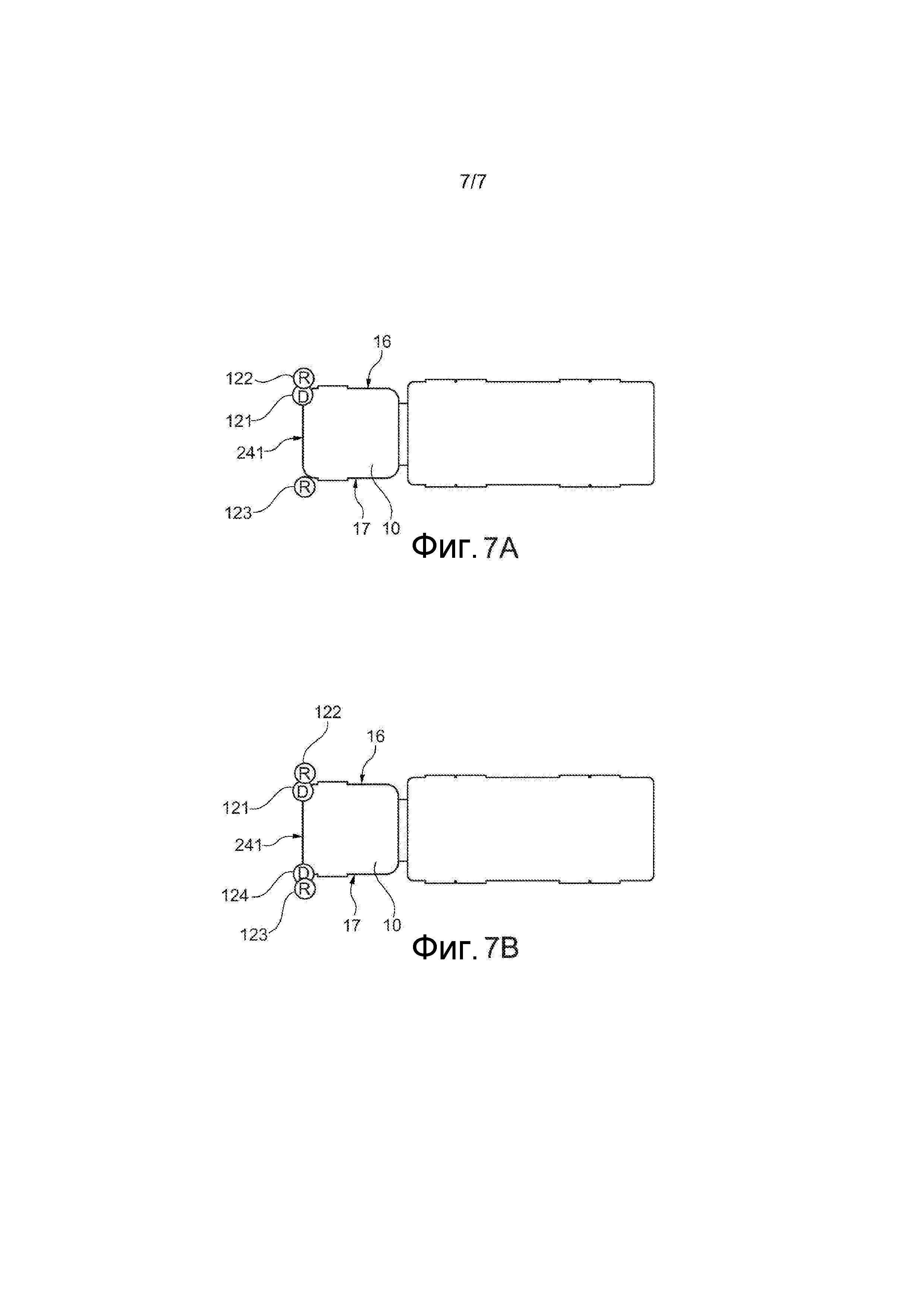
фиг. 7А, 7В - демонстрируют возможное расположение блоков камер на грузовом транспортном средстве в соответствии со следующими примерами осуществления.
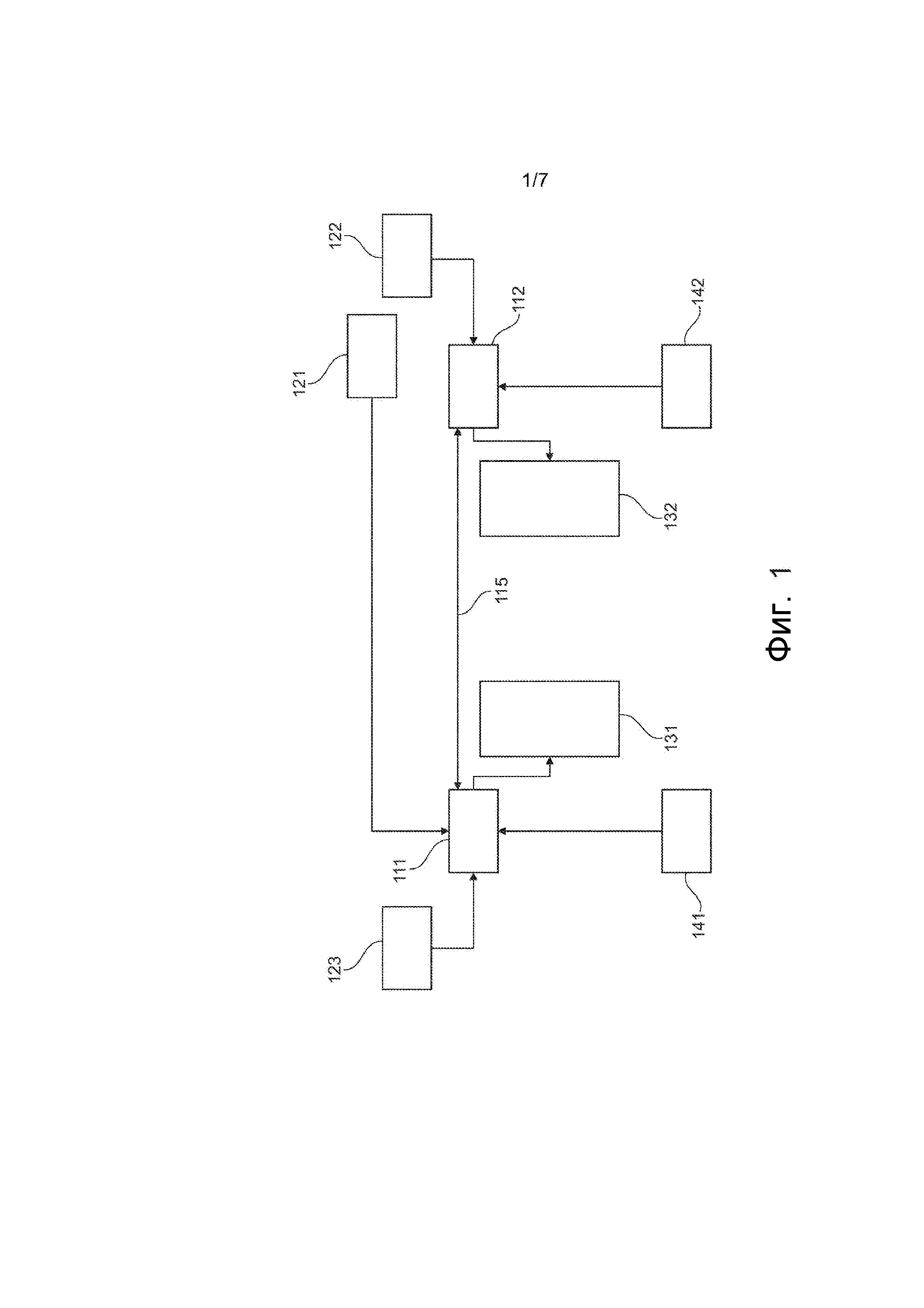
Фиг. 1 демонстрирует систему видеонаблюдения в соответствии с примером осуществления предложенного на рассмотрение изобретения. Она пригодна для использования в грузовых транспортных средствах и представляет собой, в частности, со стороны пассажира дублирующую систему, для замены имеющихся там зеркал заднего вида на систему видеонаблюдения. Система видеонаблюдения содержит первый блок 111 обработки изображений, второй блок 112 обработки изображений, первый блок 121 камеры и второй блок 122 камеры. Первый блок 121 камеры передаёт визуальные данные на первый блок 111 обработки изображений. Второй блок 122 камеры передаёт визуальные данные на второй блок 112 обработки изображений.
Первый блок 121 камеры и второй блок 122 камеры выполнены с возможностью размещения в передней угловой зоне или на боковой зоне кабины водителя (к примеру, на стороне пассажира) и для регистрации боковой или задней зоны грузового транспортного средства независимо друг от друга. В частности, первый блок 121 камеры регистрирует нижнюю зону, которая непосредственно граничит с грузовым транспортным средством. Кроме того, первый блок 121 камеры регистрирует боковую зону рядом или за кабиной водителя. Для этого первый блок 121 камеры может содержать соответствующий широкоугольный объектив, к примеру, объектив по типу «рыбий глаз». Второй блок 122 обработки изображений регистрирует боковую и заднюю зону грузового транспортного средства, причём может осуществляться одновременная регистрация. Для этого опять же может быть предусмотрен соответствующий широкоугольный объектив.
Дополнительно система видеонаблюдения с фиг. 1 содержит третий блок 123 камеры, который выполнен с возможностью размещения на стороне водителя кабины водителя и, аналогично второму блоку 122 камеры, регистрирует боковую и заднюю зону на стороне водителя. Соответствующие визуальные данные могут быть переданы на первый блок 111 обработки изображений (в альтернативном варианте также на второй блок 112 обработки изображений).
Далее в примере осуществления предусмотрены первый блок 131 индикации и второй блок 132 индикации. Первый блок 131 индикации может наглядно отображать обработанные визуальные данные первого блока 111 обработки изображений. Второй блок 132 индикации может наглядно отображать обработанные визуальные данные второго блока 112 обработки изображений. К примеру, первый блок 131 индикации может быть смонтирован на стороне водителя в кабине водителя, а второй блок 132 индикации на стороне пассажира в кабине водителя.
Далее в примере осуществления предусмотрены независимые блоки 141, 142 энергообеспечения. Так, к примеру, для первого блока 111 обработки изображений может быть предусмотрен первый блок 141 энергообеспечения. Также для второго блока 112 обработки изображений может быть предусмотрен второй блок 142 энергообеспечения. Таким образом, представленная система осуществлена полностью дублирующей, так что при выходе из строя одной отдельной подсистемы (или одного компонента), по-прежнему, гарантируется то, что водитель грузового транспортного средства в состоянии надёжно регистрировать, по меньшей мере, сторону пассажира.
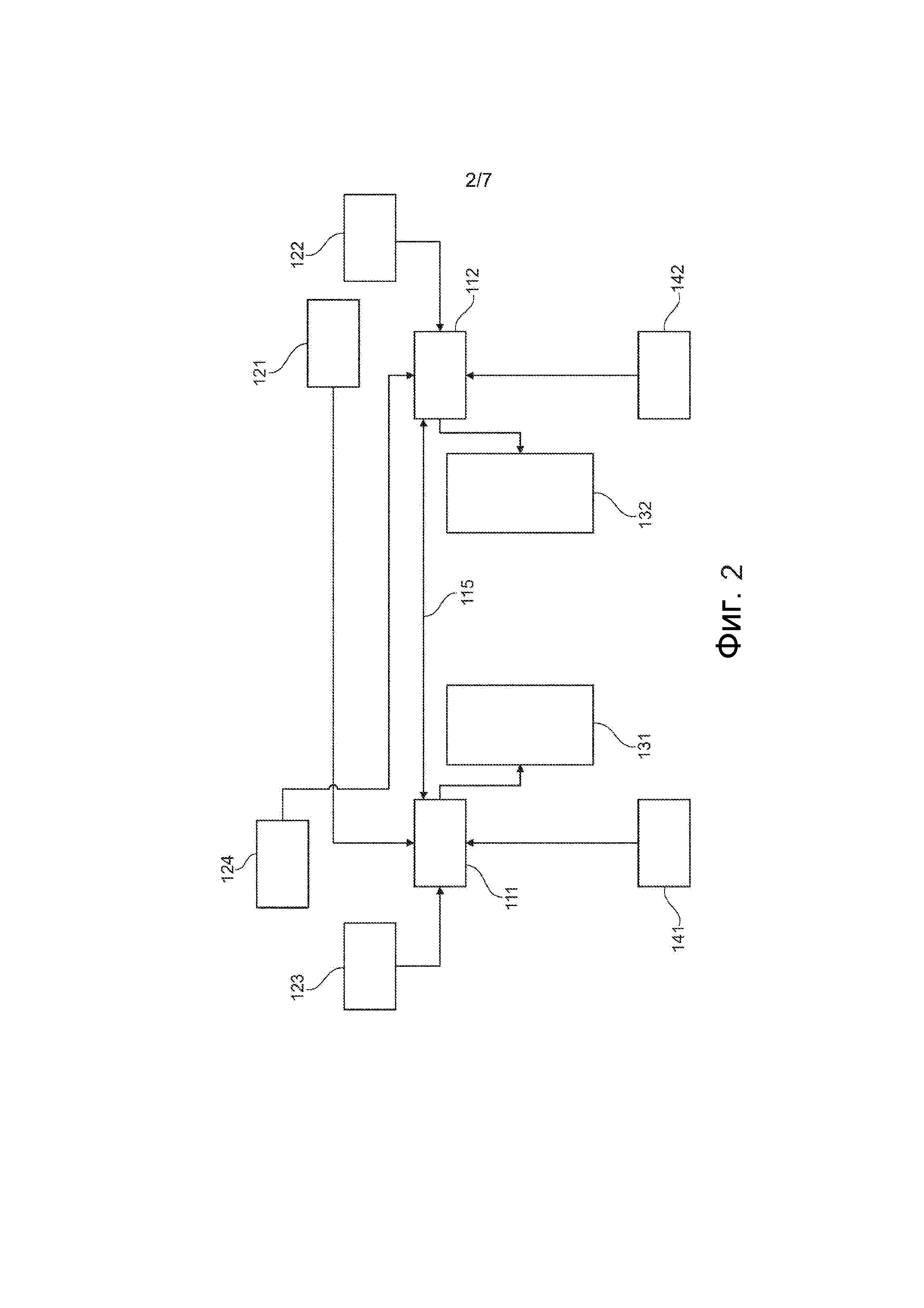
Фиг. 2 демонстрирует следующий пример осуществления системы видеонаблюдения, которая отличается от представленной на фиг. 1 системы посредством того, что предусмотрен четвёртый блок 124 камеры, который выполнен с возможностью размещения на стороне водителя в угловой зоне кабины водителя и передаёт визуальные данные на второй блок 112 обработки изображений, для отображения. Четвёртый блок 124 камеры может быть осуществлён аналогично или одинаково с первым блоком 121 камеры и регистрирует нижнюю зону, которая непосредственно граничит с грузовым транспортным средством. Кроме того, четвёртый блок 124 камеры может регистрировать боковую зону рядом или за кабиной водителя на стороне водителя. Для достижения этого четвёртый блок 124 камеры также может содержать соответствующий широкоугольный объектив, к примеру, объектив по типу «рыбий глаз».
Так как, и первый блок 121 камеры, и четвёртый блок 124 камеры выполнены с возможностью размещения на соответствующих передних угловых зонах кабины водителя и передают свои визуальные данные на различные блоки 111, 112 обработки изображений, то представленный в качестве примера объектив по типу «рыбий глаз» позволяет осуществлять также дублирующую регистрацию нижней зоны перед кабиной водителя.
Система видеонаблюдения с фиг. 2 содержит, таким образом, две параллельные подсистемы, которые могут быть осуществлены более или менее одинаково и иметь, соответственно, собственный блок обработки изображений. Так второй блок 112 обработки изображений получает как визуальные данные со стороны водителя (через четвёртый блок 124 камеры), так и со стороны пассажира (через второй блок 122 камеры), которые после обработки могут быть наглядно отображены на втором блоке 132 индикации. Таким же образом первый блок 111 обработки изображений обрабатывает как визуальные данные со стороны водителя (через третий блок 123 камеры), так и визуальные данные со стороны пассажира (от первого блока 121 камеры) и наглядно отображает результаты на первом блоке 131 индикации. Таким образом, достигается полностью дублирующая системы как на стороне водителя, так и на стороне пассажира, и в зоне перед грузовым транспортным средством.
В примерах осуществления с фиг. 1 и фиг. 2 предусмотрена, кроме того, линия 115 передачи данных между первым блоком 111 обработки изображений и вторым блоком 112 обработки изображений. Первый блок 111 обработки изображений и второй блок 112 обработки изображений могут быть осуществлены, к примеру, чтобы в случае ошибки визуальные данные, которые обычно обрабатываются соответствующим блоком 111, 112 обработки изображений, перенаправить на соответствующий другой блок обработки изображений. Соответствующий другой блок обработки изображений может отображать тогда переданные визуальные данные на соответствующем назначенном ему, корректно работающем блоке индикации. Дополнительно водитель может быть проинформирован о неисправности. Для этого может быть подан предупредительный сигнал.
Дополнительно возможно также, чтобы по линии 115 передачи визуальные данные передавались непрерывно (и не в случае неисправности). В этом случае визуальные данные могут сравниваться - по меньшей мере, для перекрытых зон регистрации. Основываясь на сравнении, возможно распознавать ошибки в системе (к примеру, посредством замершего изображения). Переданные по линии 115 передачи данных изображения могут также отображаться посредством соответствующего другого устройства индикации. Водитель может быть и в этом случае проинформирован об ошибке.
В соответствии с примерами осуществления некоторые или все блоки камер могут содержать широкоугольные объективы, причём первый блок 121 камеры и четвёртый блок камеры имеют, в частности, объектив по типу «рыбий глаз». Благодаря этому, как уже упомянуто, параллельно могут быть зарегистрированы различные зоны работы датчиков и, в частности, нижние зоны вокруг транспортного средства. Так, к примеру, второй блок 122 камеры может быть выполнен с возможностью регистрировать первую и вторую нижние зоны сбоку рядом или за грузовым транспортным средством. Первый блок 121 камеры может быть также выполнен с возможностью регистрировать третью нижнюю зону сбоку под кабиной водителя, а также четвёртую нижнюю зону перед кабиной водителя.
Фиг. 3А, фиг. 3В, фиг. 4А и фиг. 4В демонстрируют нижние зоны, которые в соответствии с примерами осуществления одновременно регистрируются, к примеру, блоками 121, 122, 123, 124 камер в качестве боковых зон (или других боковых зон). Здесь и далее все данные по длине учитываются с допуском ±10% или ±5%. Кроме того, эти нижние зоны являются минимальными зонами, которые, по меньшей мере, регистрируются. При этом понимается, что блоки камер, помимо этого, могут регистрировать другие зоны.
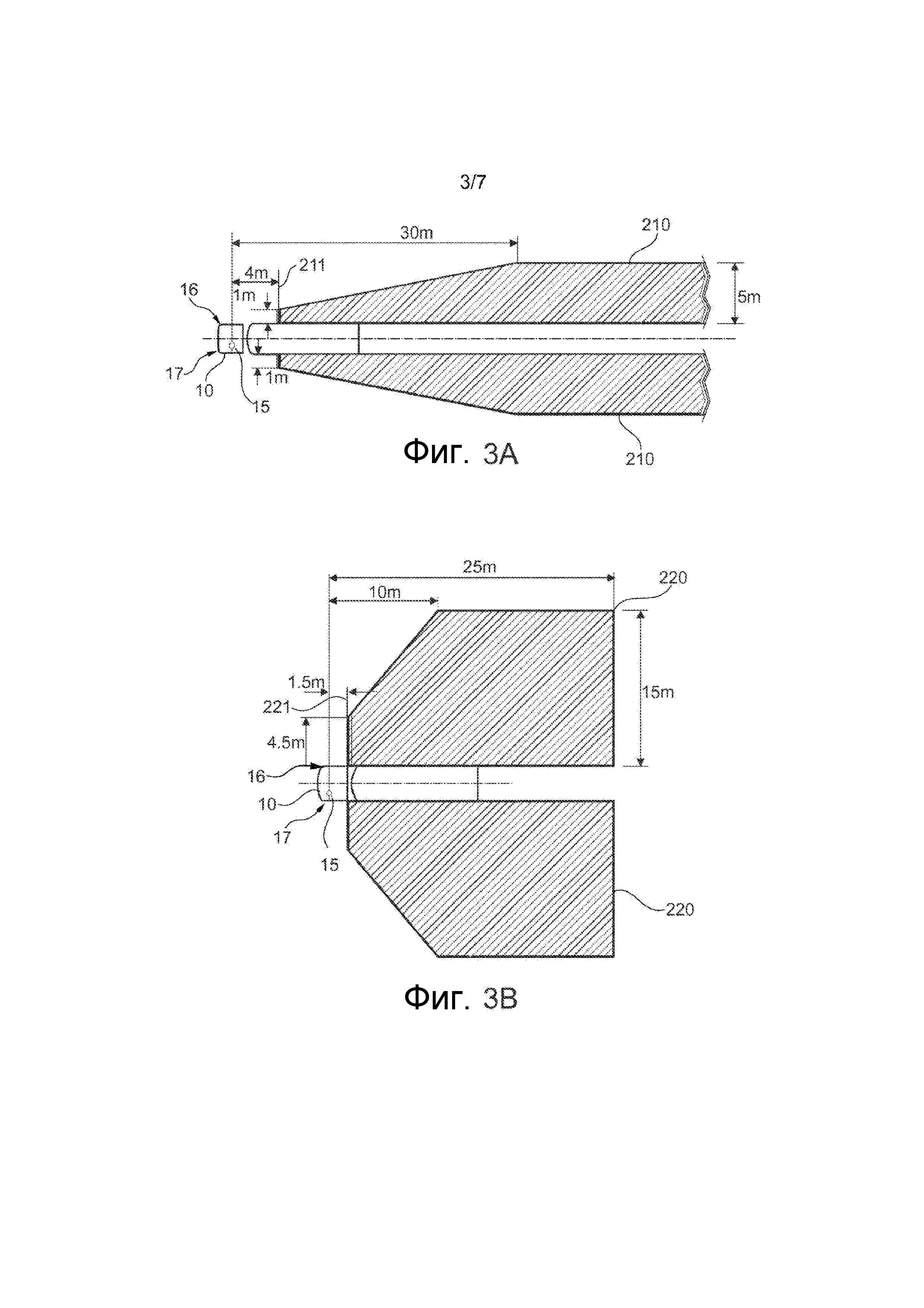
Фиг. 3А, 3В отображает нижние зоны 210, 220, которые в соответствии с примерами осуществления одновременно регистрируются вторым блоком камеры.
Фиг. 3А демонстрирует первую нижнюю зону 210, которая проходит с обеих сторон транспортного средства и может определяться следующим образом: она начинается от первой линии 211, которая проходит перпендикулярно направлению движения грузового транспортного средства и на 4 м смещена назад от положения 15 водителя транспортного средства (или его оптического центра), и проходит с переменной шириной сбоку параллельно обоим краям 16, 17 транспортного средства назад. Переменная ширина увеличивается до расстояния 26 м от первой линии 211 линейно от 1 м на ширину 5 м, а затем остаётся постоянной. Первая нижняя зона 210 имеет, таким образом, максимальную ширину примерно 5м, причём эта максимальная ширина достигается на расстоянии примерно 30 м от положения водителя.
Фиг. 3В демонстрирует вторую нижнюю зону 220, которая располагается с обеих сторон транспортного средства и может определяться следующим образом: вторая нижняя зона 220 начинается от второй линии 221, которая проходит перпендикулярно направлению движения грузового транспортного средства и на 1,5 м смещена назад от положения 15 водителя транспортного средства (или его оптического центра), и проходит с переменной шириной сбоку параллельно обоим краям 16, 17 транспортного средства на длину 23,5 м назад. Переменная ширина увеличивается до значения 8,5 м от второй линии 221 линейно от 1 м на ширину 15 м, а затем остаётся постоянной. Расстояние увеличивается, таким образом, с примерно 4,5 м до максимальной ширины 15 м, которая достигается на расстоянии примерно 10 м от положения водителя.
Первая нижняя зона 210 с фиг. 3А представляет собой, таким образом, в основном зону видимости в направлении назад, в то время как вторая нижняя зона 220 с фиг. 3В представляет собой зону видимости сбоку, которая важна, к примеру, для смены полосы движения, чтобы, к примеру, регистрировать наличие транспортного средства в одной или в двух полосах движения рядом с транспортным средством.
Второй блок 122 камеры (и аналогично третий блок 123 камеры на стороне 17 водителя) служит, в первую очередь, для регистрации первой нижней зоны 210 и одновременно второй нижней зоны 220.
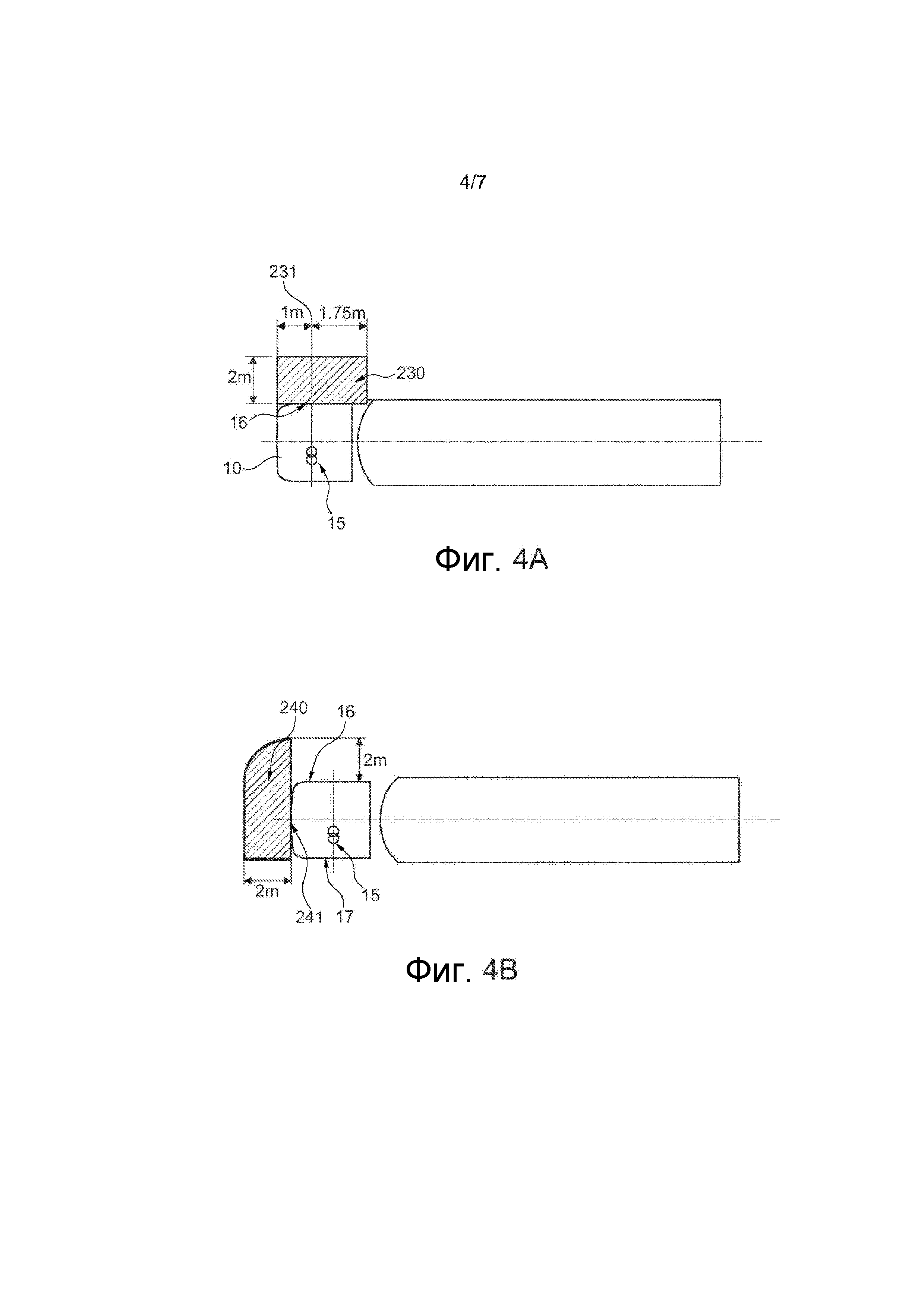
Фиг. 4А, 4В отображают третью нижнюю зону 230 и четвёртую нижнюю зону 240, которые в соответствии с примерами осуществления, в первую очередь, одновременно регистрируются первым блоком 121 камеры (и аналогично четвёртым блоком 124 камеры на стороне 17 водителя).
Фиг. 4А отображают третью нижнюю зону 230, которая начинается от третьей линии 231, которая проходит перпендикулярно направлению движения грузового транспортного средства через положение 15 водителя, на 1,75 м назад и примерно на 1 м вперёд. Ширина третьей нижней зоны 230 равна примерно 2 м от правого края 16 транспортного средства. Таким же или аналогичным образом определяется третья нижняя зона 230 для стороны 17 водителя.
Фиг. 4В демонстрирует четвёртую нижнюю зону 240, которая, к примеру, также может регистрироваться посредством первого блока 121 камеры. Четвёртая нижняя зона 240 проходит, начиная от передней стороны 241 кабины 10 водителя по ширине транспортного средства до удаления примерно на 2 м вперёд и до 2 м за пределы края 16 транспортного средства со стороны пассажира. Дополнительно четвёртая нижняя зона 240 в переднем правом углу (с точки зрения водителя) закруглена с радиусом примерно 2м.
Третья нижняя зона 230 и четвёртая нижняя зона 240 регистрируют, таким образом, в частности, зоны, которые могут плохо просматриваться или вообще не просматриваться водителем грузового транспортного средства (в отличие от легкового автомобиля).
Для достижения желаемого дублирования системы видеонаблюдения первый блок 121 камеры, к примеру, таким образом монтируется на грузовом транспортном средстве (к примеру, в верхней угловой зоне кабины 10 водителя на стороне 16 пассажира), что первый блок 121 камеры может регистрировать третью нижнюю зону 230, четвёртую нижнюю зону 240, первую нижнюю зону 210 и вторую нижнюю зону 220. Чтобы иметь возможность максимально реалистично наглядно отображать все нижние зоны, к примеру, снимки первой нижней зоны 210 и второй нижней зоны 220 могут быть соответствующим образом обработаны, с целью устранения возможных искажений посредством широкоугольного объектива первого блока 121 камеры.
За счёт дублирования становится возможна замена системой видеонаблюдения традиционных зеркал. Даже при выходе из строя одного из блоков 121, 122 … камер всё еще гарантируется, что водитель имеет достаточный боковой и задний обзор – в частности, после упомянутой трансформации изображений (к примеру, для визуальных данных первого блока 121 камеры, для согласования их с регистрацией заднего обзора). Для этого предпочтительным является выбор достаточно большого разрешения для блоков камер, чтобы имелось достаточно большое количество деталей изображения для расположенных далее сзади зон.
Дублированная регистрация изображений, обработка изображений и индикация изображений достигается в соответствии с предложенным на рассмотрение изобретением не только для стороны 16 пассажира, но также и для стороны 17 водителя. Для этого служит система с фиг. 2, у которой и на стороне 17 водителя предусмотрены два независимых блока камер: третий блок 123 камеры, который передаёт визуальные данные на первый блок 111 обработки изображений, и четвёртый блок 124 камеры, который передаёт визуальные данные на второй блок 112 обработки изображений. Даже если имеет место выход из строя этих компонентов, за счёт наличия исправной подсистемы всё ещё может гарантироваться, что визуальные данные могут отображаться посредством соответствующей индикации (к примеру, вследствие наличия независимых блоков обработки изображений). На стороне водителя четвёртый блок 124 камеры также является широкоугольной камерой или камерой по типу «рыбий глаз», которая, однако, также регистрирует визуальные данные, которые после соответствующей трансформации пригодны для того, чтобы регистрировать первую и вторую нижние зоны 210, 220 и в максимально неискажённом виде предоставлять их водителю. Для этого четвёртый блок 124 камеры может быть снова помещён в верхней угловой зоне кабины водителя грузового транспортного средства, так что этот блок камеры может регистрировать не только третью нижнюю зону 230 и четвёртую нижнюю зону 240 (перед кабиной водителя), но и направленную назад первую нижнюю зону 210 и вторую нижнюю зону 220.
Первый блок 121 камеры и четвёртый блок 124 камеры могут быть осуществлены, к примеру, одинаковыми и лишь закреплены в различных положениях на кабине водителя. Также второй блок 122 камеры может быть осуществлён аналогично третьему блоку 123 камеры и помещён лишь на противоположной стороне транспортного средства.
Примеры осуществления позволяют, таким образом, водителю постоянно сохранять контроль над происходящим, как с левой стороны транспортного средства, так и с правой стороны транспортного средства, и осуществлять надёжную смену ряда и, притом именно в том случае, когда происходит сбой в одном из блоков 121, 122 … камер, или блоков 111, 112 обработки, или блоков 131, 132 индикации.
Фиг. 5А и фиг. 5В демонстрируют в качестве примера зарегистрированное изображение стороны водителя (с левой стороны) и относящееся к нему изображение в соответствующем первом блоке 131 индикации (с правой стороны). На фиг. 5А в качестве примера выделена первая нижняя зона 210, которая, к примеру, отображается в верхней зоне дисплея в первом блоке 131 индикации. Фиг. 5В демонстрирует вторую нижнюю зону 220, которая, к примеру, отображается на первом блоке 131 индикации в нижней зоне.
Фиг. 6А демонстрирует в качестве примера зарегистрированное изображение с выделенной третьей нижней зоной 230, как она регистрируется посредством первого блока 121 камеры на стороне 16 пассажира. Фиг. 6В демонстрирует в качестве примера четвёртую нижнюю зону 240, как она регистрируется, к примеру, посредством первого блока 121 камеры со стороны 16 пассажира. Обе зарегистрированные нижние зоны 230, 240 могут быть наглядно отображены аналогично первой нижней зоне 210 и второй нижней зоне 220 (см. фиг. 5А, 5В).
Фиг. 7А демонстрирует в качестве примера размещение блоков 121, 122 …. камер в различных положениях на кабине 10 грузового транспортного средства. Первый блок 121 камеры монтируется при этом вместе со вторым блоком 122 камеры в передней угловой зоне на стороне 16 пассажира. Третий блок 123 камеры закрепляется в передней угловой зоне на стороне 17 водителя кабины 10 водителя.
Фиг. 7В демонстрирует размещение блоков камер для примера осуществления с фиг. 2. Для этого дополнительно к представленным на фиг. 7А блокам 121, 122, 123 камер закрепляется ещё и четвёртый блок 124 камеры в передней угловой зоне на стороне 17 водителя на кабине 10 водителя. За счёт представленных вариантов закреплений в передней угловой зоне становится возможно регистрировать контролируемые нижние зоны посредством различных блоков камер. Визуальные данные, таким образом, дублируются (по меньшей мере, для первой нижней зоны 210, для второй нижней зоны 220 и для четвёртой угловой зоны 240), а система устойчивой в отношении ошибок.
Важные аспекты примеров осуществления предложенного на рассмотрение изобретения могут быть резюмированы следующим образом.
Система с использованием камер предоставляет в распоряжение дублирующую регистрацию изображений, по меньшей мере, для стороны пассажира транспортного средства, так что отказ одного компонента не приводит к тотальному выходу системы из строя и водитель, несмотря на ошибку, может регистрировать боковые и заднюю зоны. Конструкция включает в себя для этого, к примеру, две обращённые назад камеры или блоки 122, 123 камер, которые могут быть размещены, соответственно, в передних угловых зонах кабины 10 водителя (к примеру, в качестве замены традиционных зеркал) и регистрируют достаточно большое поле обзора, чтобы иметь возможность наглядно отобразить несколько зон сбоку и сзади транспортного средства. Кроме того, предусмотрена направленная вниз камера 121, которая имеет, к примеру, широкоугольный объектив или линзу по типу «рыбий глаз» и размещается, по меньшей мере, на стороне 16 пассажира, чтобы там иметь возможность перекрывать несколько регистрируемых зон (нижних зон).
В предпочтительном варианте на стороне 17 водителя предусмотрено два типа камер, широкоугольная камера 124 для перекрытия нижней зоны рядом и/или перед кабиной 10 водителя и направленная назад камера 123. Кроме того, система содержит, по меньшей мере, два блока 131, 132 индикации для водителя, которые в предпочтительном варианте предусмотрены на каждой стороне кабины 10 транспортного средства и наглядно отображают изображения с камер. Кроме того, система содержит, по меньшей мере, два независимых блока 111, 112 обработки изображений, которые подсоединены к независимым блокам 141, 142 энергообеспечения, причём каждый блок 111, 112 обработки изображений производит оценку части данных с камеры и управляет соответствующим блоком 131, 132.
По меньшей мере, два блока 111, 112 обработки изображений обрабатывают изображения с камер таким образом, что, по меньшей мере, со стороны 16 пассажира транспортного средства возможно осуществить дублирующее перекрытие, по меньшей мере, для обращённой назад зоны грузового транспортного средства. Для этого, к примеру, одна из двух систем камер направляется на один дисплей, а визуальные данные другой системы камер на другие дисплеи, которые, кроме того, имеют, соответственно, отдельное энергообеспечение.
Затем блоки 111, 112 обработки изображений могут быть посредством линии 115 передачи данных соединены друг с другом, для обмена визуальными данными. Это имеет смысл, в частности, тогда, когда одна из систем выходит из строя, так что автоматически зарегистрированные визуальные данные могут быть отображены на другой системе посредством другого дисплея. Благодаря этому, надёжность при визуальной регистрации окружающего пространства грузового транспортного средства существенно повышается.
Примеры осуществления предложенного на рассмотрение изобретения относятся, в частности, также к следующим предметам изобретения.
Система для замены зеркал заднего вида для грузовых транспортных средств с защитой от ошибок, отличающаяся наличием, по меньшей мере, одной дублирующей системы видеонаблюдения для стороны пассажира транспортного средства.
В соответствии со следующими предпочтительными вариантами осуществления, как правило, дублирующая система видеонаблюдения содержит, по меньшей мере, одну направленную назад камеру в цепи передачи и одну направленную вниз камеру по типу «рыбий глаз» в другой цепи передачи, причём каждая из обеих камер регистрирует две зоны датчика на стороне пассажира и обе цепи передачи соединены с линией передачи данных, для обеспечения независимого изображения.
В соответствии со следующими предпочтительными вариантами осуществления, как правило, дублирующая система видеонаблюдения содержит, по меньшей мере, одну следующую направленную назад камеру (которая регистрирует две зоны датчика на стороне водителя), которая интегрирована в ту же цепь передачи, что и направленная вниз камера по типу «рыбий глаз».
В соответствии со следующими предпочтительными вариантами осуществления, как правило, также на стороне водителя предусмотрена дублирующая система видеонаблюдения.
В соответствии со следующими предпочтительными вариантами осуществления, как правило, дублирующая система видеонаблюдения содержит, по меньшей мере, одну направленную назад камеру в одной из цепей передачи (которая регистрирует две зоны датчика на стороне водителя) и направленную вниз камеру по типу «рыбий глаз» (которая регистрирует, по меньшей мере, две зоны датчика на стороне водителя) в другой цепи передачи, причём цепи передач соединены друг с другом посредством линии передачи данных, для предоставления независимых возможностей индикации.
В соответствии со следующими предпочтительными вариантами осуществления, как правило, также посредством дублирующей системы с камерой регистрируется передняя сторона транспортного средства.
В соответствии со следующими предпочтительными вариантами осуществления, как правило, дублирующая система видеонаблюдения содержит, по меньшей мере, две направленные вниз камеры по типу «рыбий глаз» (каждая из них регистрирует зону датчика перед транспортным средством), которые отдельно соединены с двумя цепями передач, причём цепи передач посредством линии передачи данных соединены друг с другом, для обеспечения независимого изображения.
Способ определения ошибки в системе видеонаблюдения для грузовых транспортных средств содержит, кроме того, алгоритм, который используется для визуальных данных, с целью выявления отклонения в зарегистрированном изображении (к примеру, застывшего изображения) для перекрытых зон датчика. В случае установленного отклонения осуществляется необходимая деактивация соответствующей цепи передачи (или схемы) и предоставление соответствующих визуальных данных для водителя посредством оставшейся исправной системы.
Это способ служит для того, чтобы определять имеет ли место неправильная работа в одном из компонентов системы видеонаблюдения. В ответ на такую неправильную работу зарегистрированные визуальные данные, соответственно, иным образом внутри системы передаются далее и там предоставляются в распоряжение водителю.
Способ может быть реализован также посредством компьютера, то есть он может быть осуществлён посредством инструкций, которые сохранены на носителе данных и могут осуществлять этапы способа, когда они выполняются процессором. Инструкции содержат обычно одно или несколько инструкций, которые могут быть записаны различным способом на различные среды, на управляющее устройство или по периферии управляющего устройства (посредством процессора), которые, когда они считываются и осуществляются посредством блока управления, инициируют блок управления для осуществления функций, функциональности и операций, которые необходимы для осуществления способа в соответствии с предложенным на рассмотрение изобретением.
Выявленные в описании, в формуле изобретения и на чертежах признаки изобретения как по отдельности, так и в любой комбинации, могут быть важны для осуществления изобретения.
Перечень ссылочных позиций
10 - кабина водителя
15 - положение водителя (положение глаз)
16 - сторона пассажира (край транспортного средства на стороне пассажира)
17 - сторона водителя
20 - разметки проезжей части
111, 112, … - блоки обработки изображений
115 - линия передачи данных
121, 122, … - блоки камер
131, 132, … - отдельные блоки индикации
141, 142, … - отдельные блоки энергообеспечения
210, 220, … - боковая зона
211, 221, … - передние линии ориентира (первая линия, вторая линия, …)
241 - передний край транспортного средства / ограничение транспортного средства.
Реферат
Предложена система видеонаблюдения для боковой зоны на стороне пассажира грузового транспортного средства. Система видеонаблюдения содержит блоки обработки изображений (111, 112), линии (115) передачи данных между блоками (111, 112) обработки изображений. Блоки (111, 112) обработки изображений выполнены с возможностью независимо друг от друга обрабатывать визуальные данные, чтобы обеспечивать возможность дублирующей регистрации изображений для боковой зоны. Блоки обработки изображений (111, 112) сравнивают визуальные данные перекрываемых зон регистрации и обнаруживают ошибку системы видеонаблюдения, осуществляют трансформацию визуальных данных с блоков (121, 122, 123) камер для уменьшения искажений в горизонтальных зонах изображений, идентифицируют разметку проезжей части в визуальных данных с блоков (121, 122, 123) камер для поддержания следования полосе движения. Предложены также грузовое транспортное средство, способ обнаружения ошибки системы видеонаблюдения, считываемый компьютером носитель записи. Достигается повышение надежности. 4 н. и 10 з.п. ф-лы, 12 ил.
Комментарии