Определение данных силы трения целевого транспортного средства - RU2018104468A
Код документа: RU2018104468A
Формула
1. Компьютер, запрограммированный:
формировать, на базовом транспортном средстве, карту силы трения проезжей части дороги посредством:
выявления изменения скорости целевого транспортного средства;
расчета данных силы трения на основании изменения скорости; и
сохранения данных силы трения.
2. Компьютер по п. 1, при этом для расчета данных силы трения, компьютер дополнительно запрограммирован определять измеренный коэффициент трения (
 ), связанный с целевым транспортным средством.
), связанный с целевым транспортным средством.
3. Компьютер по п. 2, в котором измеренный коэффициент трения (
) определен в качестве
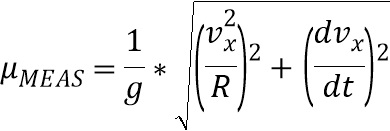 , в котором vx- продольная скорость целевого транспортного средства, g - постоянная гравитационного ускорения, а R - мгновенный радиус кривизны пути целевого транспортного средства.
, в котором vx- продольная скорость целевого транспортного средства, g - постоянная гравитационного ускорения, а R - мгновенный радиус кривизны пути целевого транспортного средства.
4. Компьютер по п. 1, при этом компьютер дополнительно запрограммирован прогнозировать событие заноса на целевом транспортном средстве по меньшей мере на основании данных силы трения.
5. Компьютер по п. 4, при этом компьютер дополнительно запрограммирован выдавать команду избежания столкновения на основании прогноза.
6. Компьютер по п. 5, при этом компьютер дополнительно запрограммирован, перед выдачей команды избежания столкновения, рассчитывать данные силы трения между по меньшей мере одной автомобильной шиной базового транспортного средства и поверхностью проезжей части дороги в контакте с ней, и при этом, компьютер дополнительно запрограммирован основывать команду избежания столкновения по меньшей мере частично на рассчитанных данных силы трения, связанных с базовым транспортным средством.
7. Компьютер по п. 6, при этом компьютер дополнительно запрограммирован использовать данные из по меньшей мере одной из антиблокировочной тормозной системы (ABS) (данные ABS) или системы курсовой устойчивости (данные системы ESC) при расчете данных силы трения между по меньшей мере одной автомобильной шиной базового транспортного средства и поверхностью проезжей частью дороги в контакте с ней.
8. Компьютер по п. 1, при этом компьютер дополнительно запрограммирован формировать карту на основании меняющихся относительных положений базового и целевого транспортных средств, на основании меняющихся условий окружающей среды или их комбинации.
9. Компьютер по п. 1, в котором карта содержит множество сегментов карты в пределах предопределенной близости от базового транспортного средства.
10. Компьютер по п. 9, при этом компьютер дополнительно запрограммирован связывать сохраненные данные силы трения с по меньшей мере одним из множества сегментов карты.
11. Компьютер по п. 9, при этом компьютер дополнительно запрограммирован рассчитывать и сохранять данные силы трения для множества целевых транспортных средств и связывать данные силы трения множества целевых транспортных средств с по меньшей мере некоторыми из множества сегментов карты.
12. Способ, состоящий в том, что:
формируют, на базовом транспортном средстве, карту силы трения проезжей части дороги посредством того, что:
выявляют изменение скорости целевого транспортного средства;
рассчитывают данные силы трения на основании изменения скорости; и
сохраняют данные силы трения.
13. Способ по п. 12, в котором расчет данных силы трения заключается в том, что определяют измеренный коэффициент трения (
), связанный с целевым транспортным средством.
14. Способ по п. 13, в котором измеренный коэффициент трения (
) определен в качестве
, в котором vx- продольная скорость целевого транспортного средства, g - постоянная гравитационного ускорения, а R - мгновенный радиус кривизны пути целевого транспортного средства.
15. Способ по п. 12, дополнительно состоящий в том, что прогнозируют событие заноса на целевом транспортном средстве по меньшей мере на основании данных силы трения.
16. Способ по п. 15, дополнительно состоящий в том, что выдают команду избежания столкновения на основании прогноза.
17. Способ по п. 16, дополнительно состоящий в том, что: перед выдачей команды избежания столкновения, рассчитывают данные силы трения между по меньшей мере одной автомобильной шиной базового транспортного средства и поверхностью проезжей части дороги в контакте с ней; и основывают команду избежания столкновения по меньшей мере частично на рассчитанных данных силы трения, связанных с базовым транспортным средством.
18. Способ по п. 12, дополнительно состоящий в том, что формируют карту на основании меняющихся относительных положений базового и целевого транспортных средств, на основании меняющихся условий окружающей среды или их комбинации.
19. Способ по п. 12, в котором карта содержит множество сегментов карты в пределах предопределенной близости от базового транспортного средства.
20. Способ по п. 19, дополнительно состоящий в том, что рассчитывают и сохраняют данные силы трения для множества целевых транспортных средств и связывают данные силы трения множества целевых транспортных средств с по меньшей мере некоторыми из множества сегментов карты.
Комментарии