Устройство для перенаправления крутящего момента - RU2519453C2
Код документа: RU2519453C2
Чертежи
Описание
ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Изобретение относится к устройству для перенаправления крутящего момента. Более конкретно, настоящее изобретение относится к устройству для приложения разного крутящего момента для первого и второго ведущих валов оси колесного транспортного средства.
УРОВЕНЬ ТЕХНИКИ
В дорожном транспортном средстве, в частности в автомобиле, желательно иметь возможность свободно распределять ведущий крутящий момент между разными колесами для улучшения динамики вождения транспортного средства. Известные устройства для получения желаемого результата называются устройствами для перенаправления крутящего момента (torque vectoring).
Устройства для перенаправления крутящего момента могут быть использованы в транспортных средствах с приводом на два колеса или с приводом на четыре колеса, хотя в настоящее время последний случай более распространен. Они могут быть использованы как для заднего ведущего вала, так и для переднего ведущего вала или в карданном валу для распределения крутящего момента между передним и задним ведущими валами.
Для получения требуемого результата в динамике вождения, в некоторых ситуациях может быть необходимым подать на ведущее колесо положительный крутящий момент по отношению к другому ведущему колесу на ведущей оси. Такой положительный крутящий момент может быть получен известным из уровня техники способом - посредством использования механической коробки передач для повышения передачи или увеличения скорости вращения ведущего вала для необходимого колеса, например на 10%.
Известно много примеров такой механической коробки передач. В таких системах, являющихся тяжелыми и дорогими, на одной из сторон центрального дифференциала расположены устройства для перенаправления крутящего момента для двух ведущих валов.
Поэтому, когда необходимы разные скорости вращения двух колес, известные устройства оказывают воздействие на скорость вращения относительно абсолютной скорости вращения, что обуславливает использование тяжелых устройств, имеющих относительно высокое энергопотребление.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Соответственно, преимущественной задачей настоящего изобретения является уменьшение или исключение по меньшей мере одного из вышеуказанных известных недостатков, раздельно или в любой комбинации, и решение по меньшей мере одной вышеуказанной проблемы посредством предложения устройства согласно прилагаемой формуле изобретения.
Задачей настоящего изобретения является создание устройства для перенаправления крутящего момента, в котором устранены вышеуказанные недостатки.
Еще одной задачей настоящего изобретения является создание эффективного устройства для перенаправления крутящего момента, выполненного с возможностью реализации в современном транспортном средстве.
Еще одной задачей настоящего изобретения является создание устройства для перенаправления крутящего момента, имеющего значительно меньшие размеры и сниженное энергопотребление.
Согласно одному аспекту изобретения предложено устройство для перенаправления крутящего момента в колесном транспортном средстве. Устройство содержит дифференциальный механизм, установленный на оси, содержащей первый ведущий вал и второй ведущий вал, источник электроэнергии, соединенный с электродвигателем, выполненным с возможностью соединения с указанной осью для перенаправления крутящего момента между первым ведущим валом и вторым ведущим валом, и управляющие средства, соединенные с указанным источником электроэнергии и выполненные с возможностью получения переменных, отражающих текущее состояние транспортного средства, и установления управляющих токов, зависящих от указанных переменных, а в устройстве дополнительно обеспечена подача управляющих токов к электродвигателю от указанного источника электроэнергии для обеспечения увеличения крутящего момента любого из первого и второго ведущих валов и соответствующего уменьшения крутящего момента другого из первого и второго ведущих валов. Преимущественным является то, что устройство может быть изготовлено относительно небольшим, так от электродвигателя требуется только работа при скорости вращения, пропорциональной разности скоростей вращения, а не скорости вращения, пропорциональной абсолютной скорости вращения.
Указанный электрический источник питания может содержать аккумулятор, и указанные управляющие средства могут содержать сеть связи транспортного средства, выполненную с возможностью сбора переменных, блок управления, выполненный с возможностью получения указанных переменных и вычисления по меньшей мере одного управляющего сигнала, и силовое электронное устройство, выполненное с возможностью получения указанного по меньшей мере одного управляющего сигнала для управления потоком электроэнергии между аккумулятором и электродвигателем посредством подачи указанных управляющих токов через аккумулятор. Благодаря этому предложенное устройство может быть использовано для определения состояния транспортного средства в режиме реального времени, так что устройство может быть использовано в качестве улучшения тяги на поверхностях, имеющих неравномерное трение.
Кроме того, устройство может содержать ходовой электродвигатель, установленный для управления указанной осью. Преимуществом этого является то, что может быть использована общая электрическая схема для электродвигателя и ходового электродвигателя, благодаря чему уменьшены размеры и сложность устройства.
Ходовой электродвигатель может быть установлен на указанной оси, так что его ротор вращается вокруг оси указанной оси. Таким образом, не требуются компоненты для передачи крутящего момента к оси, что ведет к созданию более компактного устройства.
Дифференциальный механизм может содержать дифференциал, что ведет к преимуществам в использовании легкодоступных компонентов, и в том, что электродвигатель может быть соединен с первым ведущим валом и вторым ведущим валом посредством планетарной передачи и выполнен с возможностью управления солнечной шестерней, в то время как первый ведущий вал соединен с коронной шестерней, а второй ведущий вал соединен с сателлитами. В таком варианте реализации передаточные числа планетарной передачи могут быть выбраны так, что крутящий момент не передается через планетарную передачу, когда электродвигатель отключен. Кроме того, передаточные числа планетарной передачи могут быть выбраны так, что электродвигатель остается неподвижным, когда первый ведущий вал и второй ведущий вал вращаются с одинаковой скоростью. Это означает снижение возможных потерь энергии.
Дифференциальный механизм может содержать первую планетарную передачу, соединенную с первым ведущим валом, и вторую планетарную передачу, соединенную со вторым ведущим валом, а электродвигатель может быть соединен с первым ведущим валом и вторым ведущим валом посредством двух зубчатых колес, вращающихся в разных направлениях и соединенных друг с другом посредством проходящего вдоль оси вала. Таким образом, соединяющий зубчатые колеса вал выполнен с возможностью оставаться неподвижным, когда первый ведущий вал и второй ведущий вал вращаются с одинаковой скоростью. Кроме того, этот вал сконструирован таким образом, чтобы вращаться со скоростью, пропорциональной разности скоростей вращения между первым ведущим валом и вторым ведущим валом. Поскольку в большинстве случаев указанная разность скоростей вращения будет равна нулю или очень близкой к нулю, потери энергии будут снижены.
Электродвигатель может быть соединен с муфтой, выполненной с возможностью отсоединения оси вращения электродвигателя от дифференциального механизма. Муфта выполнена с возможностью автоматического отсоединения, когда ее скорость вращения превышает заданное пороговое значение. В другом варианте управляющие средства выполнены с возможностью вызвать автоматическое отсоединение муфты на основе анализа указанной по меньшей мере одной переменной, отражающей текущее состояние транспортного средства. Преимущественным является то, что электродвигатель защищен от перегрузок, например, переходных состояний, таких как вмешательство электронной системы динамической стабилизации автомобиля (системы ESP).
Указанный ходовой электродвигатель может быть соединен с механическим разъединяющим устройством, выполненным с возможностью отсоединения ходового электродвигателя от указанной оси. В другом варианте управляющие средства выполнены с возможностью обеспечения автоматического срабатывания механического разъединяющего устройства на основе анализа по меньшей мере одной переменной из указанных, отражающих текущее состояние транспортного средства, для отсоединения ходового электродвигателя от указанной оси. Еще одним преимуществом изобретения является то, что большие потери, вызванные моментом сопротивления и ослабляющим полем во время высокой скорости, могут быть снижены или исключены.
Силовое электронное устройство может быть дополнительно выполнено с возможностью управления потоком энергии между аккумулятором и ходовым электродвигателем посредством подачи управляющих токов к указанному ходовому электродвигателю через аккумулятор. Силовое электронное устройство может быть дополнительно выполнено с возможностью обеспечения обратного потока энергии для зарядки аккумулятора во время торможения транспортного средства. Таким образом, для снижения энергопотребления транспортного средства может быть использовано рекуперативное торможение.
Указанный блок управления может быть выполнен с возможностью выполнения управляющих программ, каждая из которых разработана для управления соответствующим аспектом динамики вождения транспортного средства посредством соответствующего вычисления запросов крутящего момента для электродвигателя, представленных указанным по меньшей мере одним управляющим сигналом к силовому электронному устройству на основе указанных переменных, отражающих текущее состояние транспортного средства.
Блок управления дополнительно может содержать арбитражные средства 434 для обработки параллельных запросов крутящего момента от различных управляющих программ посредством определения приоритетов таких параллельных запросов и разрешения, комбинирования или запрещения каждого такого отдельного параллельного запроса наиболее подходящим образом.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее изобретение будет описано со ссылками на прилагаемые чертежи, на которых:
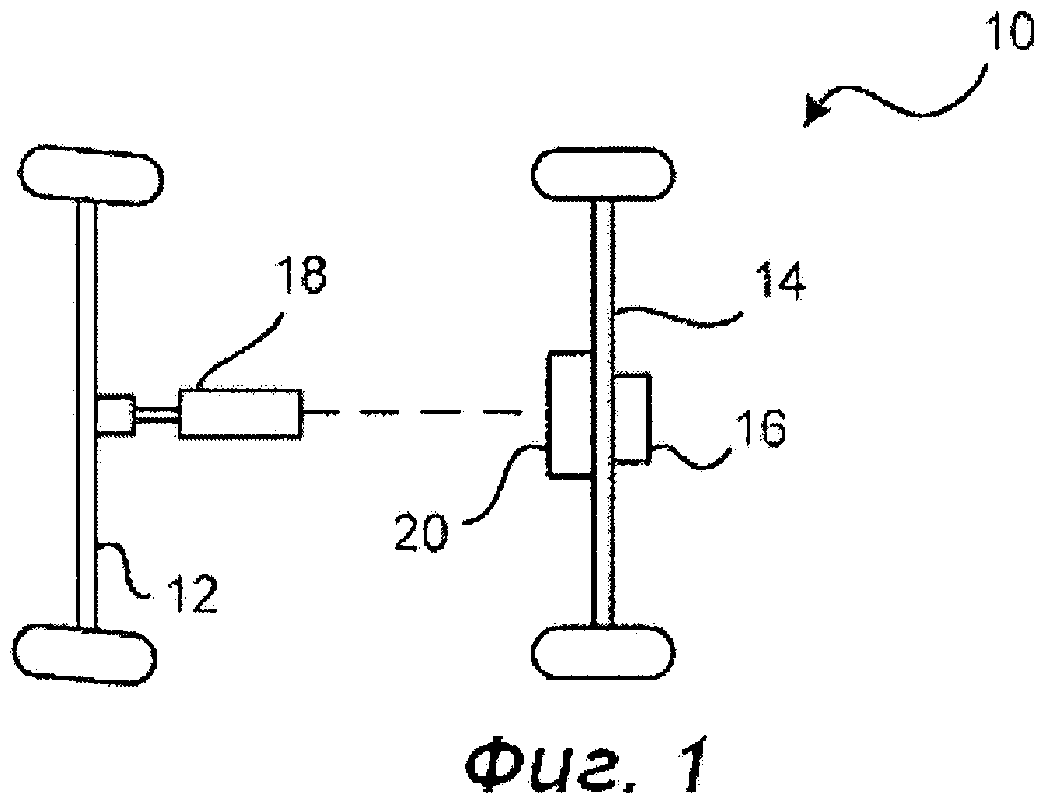
на фиг.1 изображен схематический вид транспортного средства согласно одному варианту реализации;
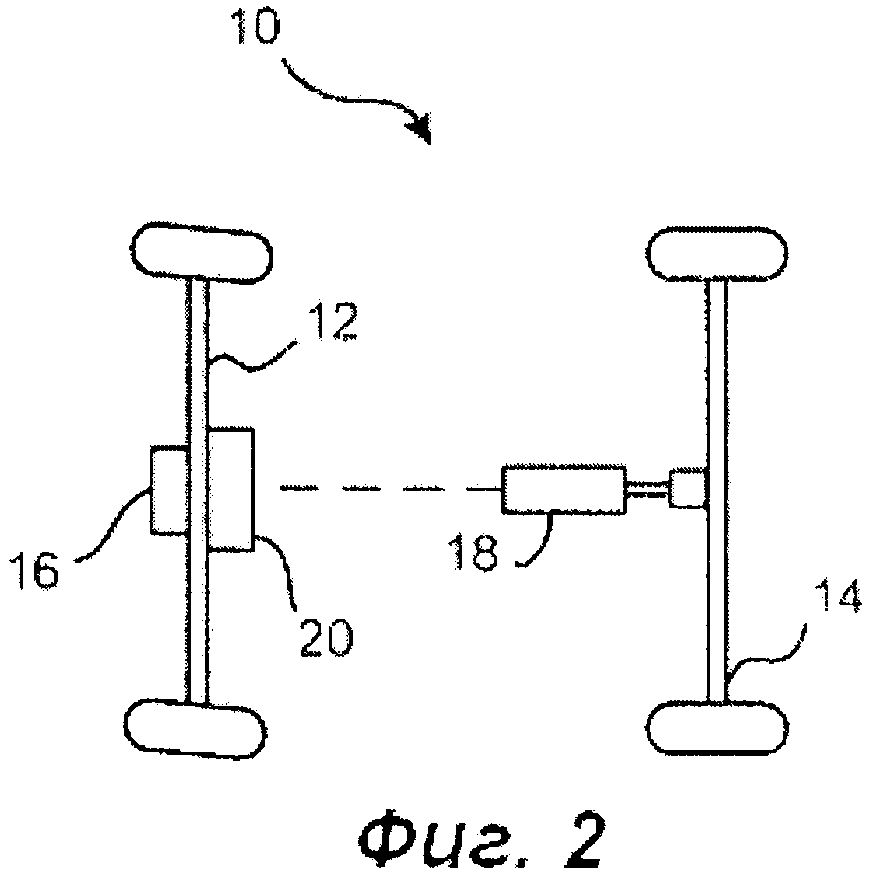
на фиг.2 изображен схематический вид транспортного средства согласно другому варианту реализации;
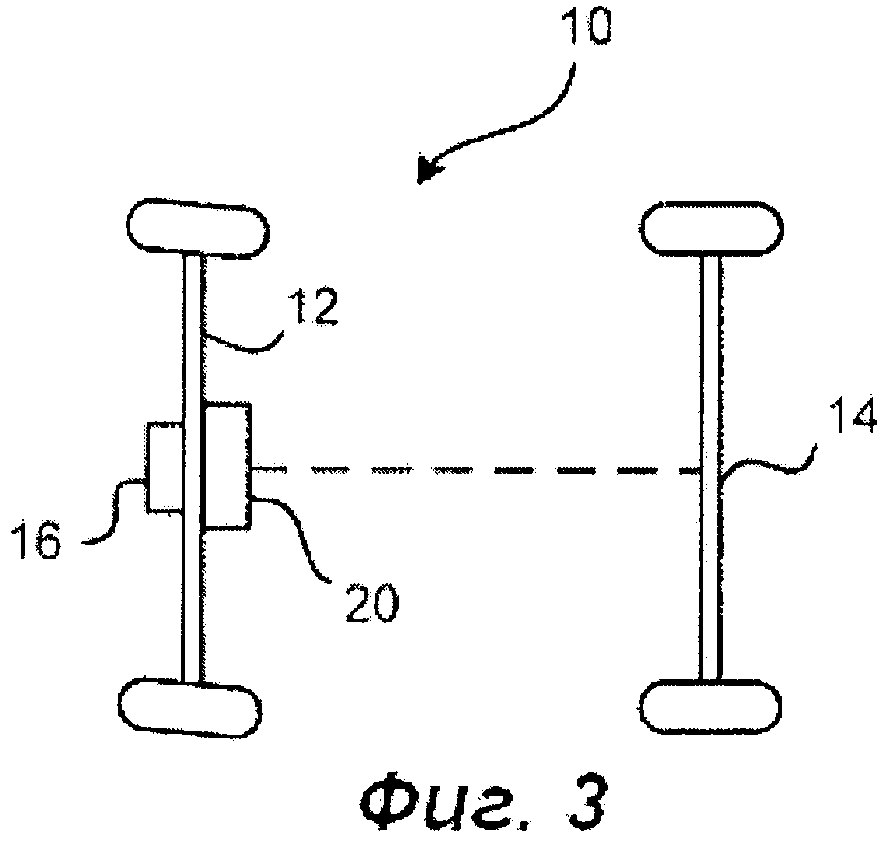
на фиг.3 изображен схематический вид транспортного средства согласно еще одному варианту реализации;
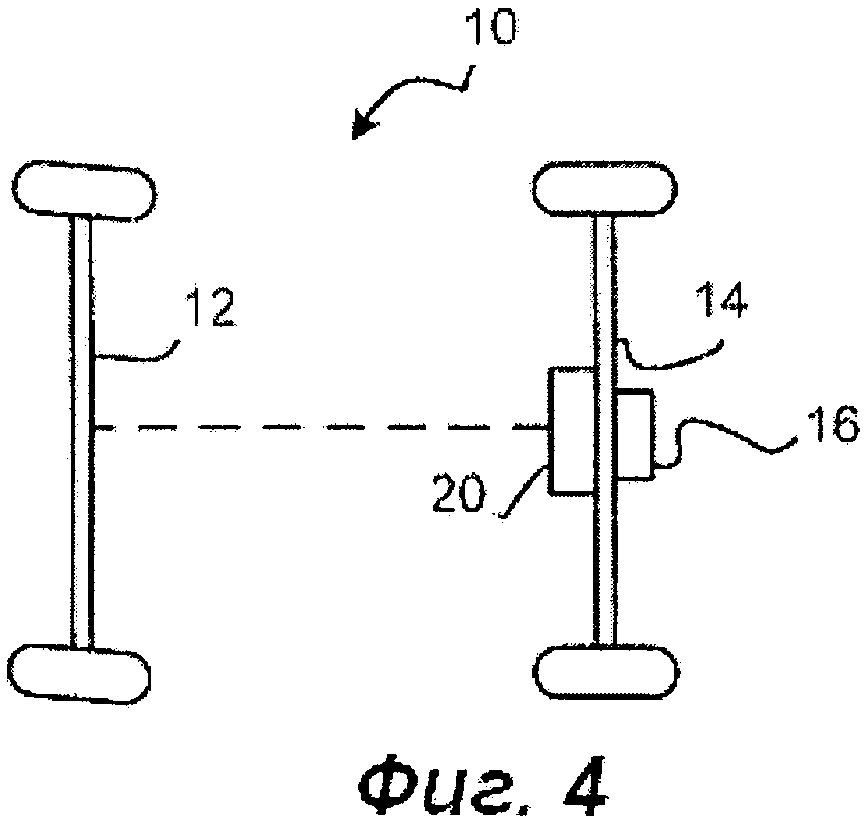
на фиг.4 изображен схематический вид транспортного средства согласно еще одному варианту реализации;
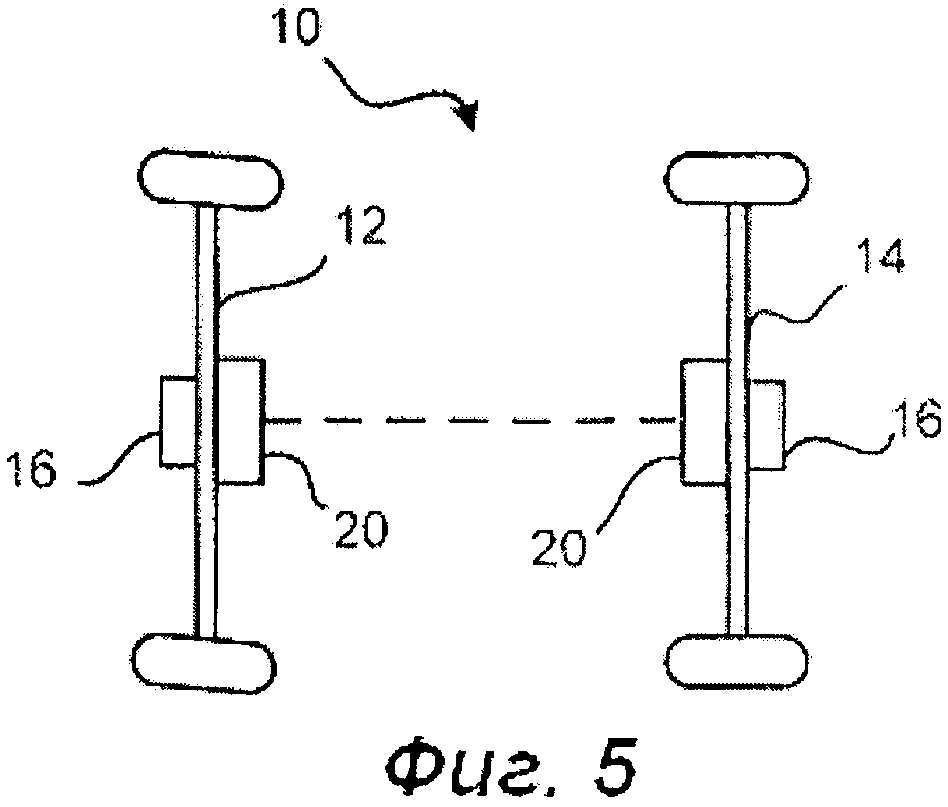
на фиг.5 изображен схематический вид транспортного средства согласно еще одному варианту реализации;
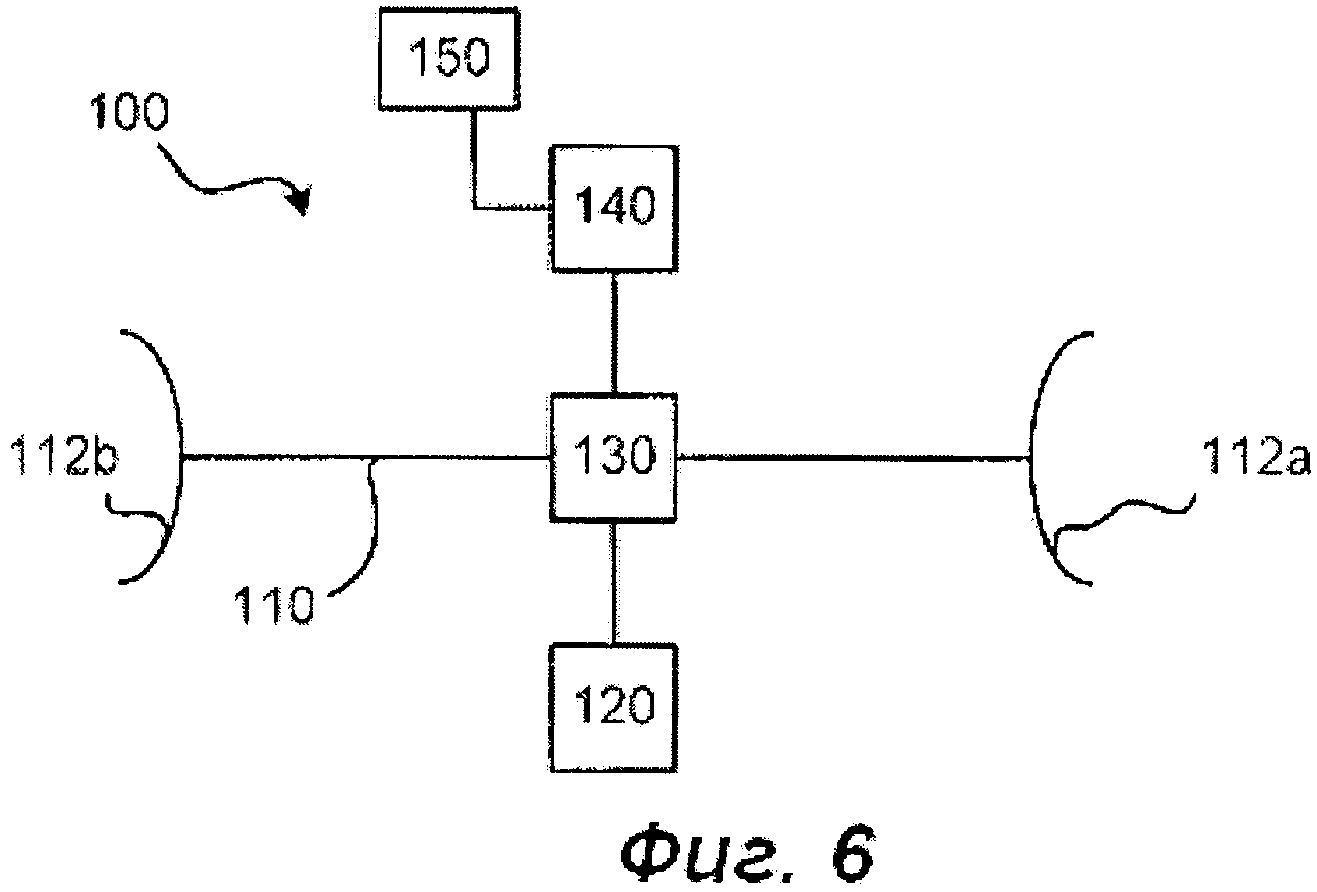
на фиг.6 изображен схематический вид устройства для перенаправления крутящего момента согласно одному варианту реализации;
на фиг.7 изображен поперечный разрез устройства для перенаправления крутящего момента согласно одному варианту реализации;
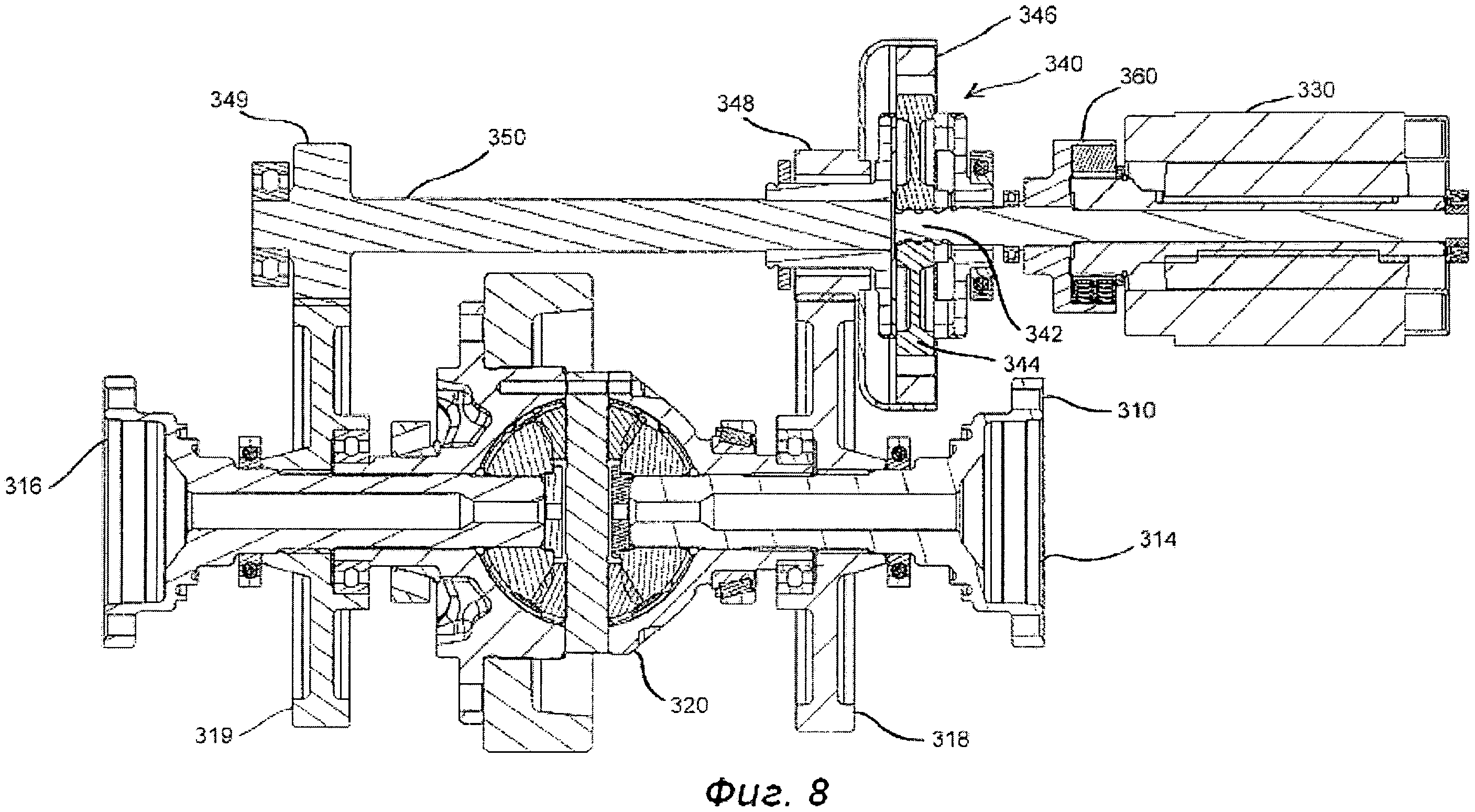
на фиг.8 изображен поперечный разрез устройства для перенаправления крутящего момента согласно еще одному варианту реализации;
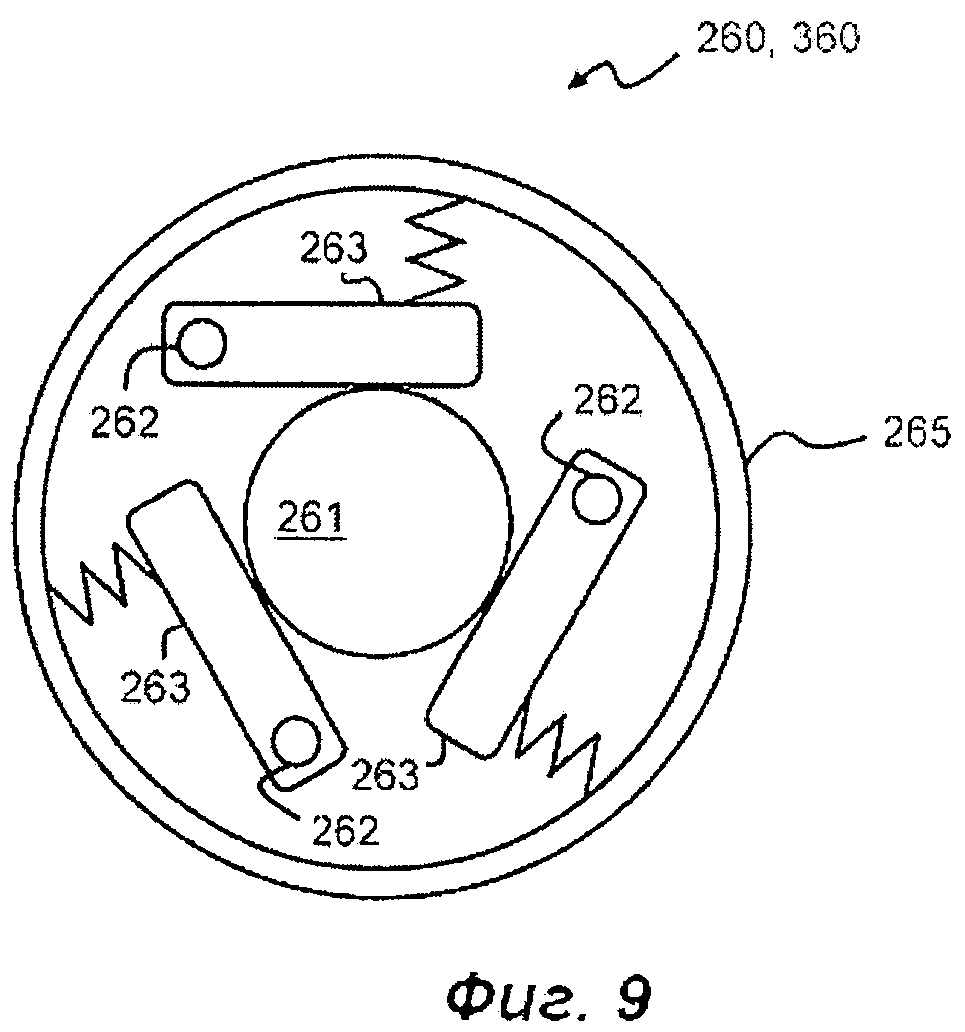
на фиг.9 изображен поперечный разрез муфты, предназначенной для использования внутри устройства для перенаправления крутящего момента согласно одному из вариантов реализации;
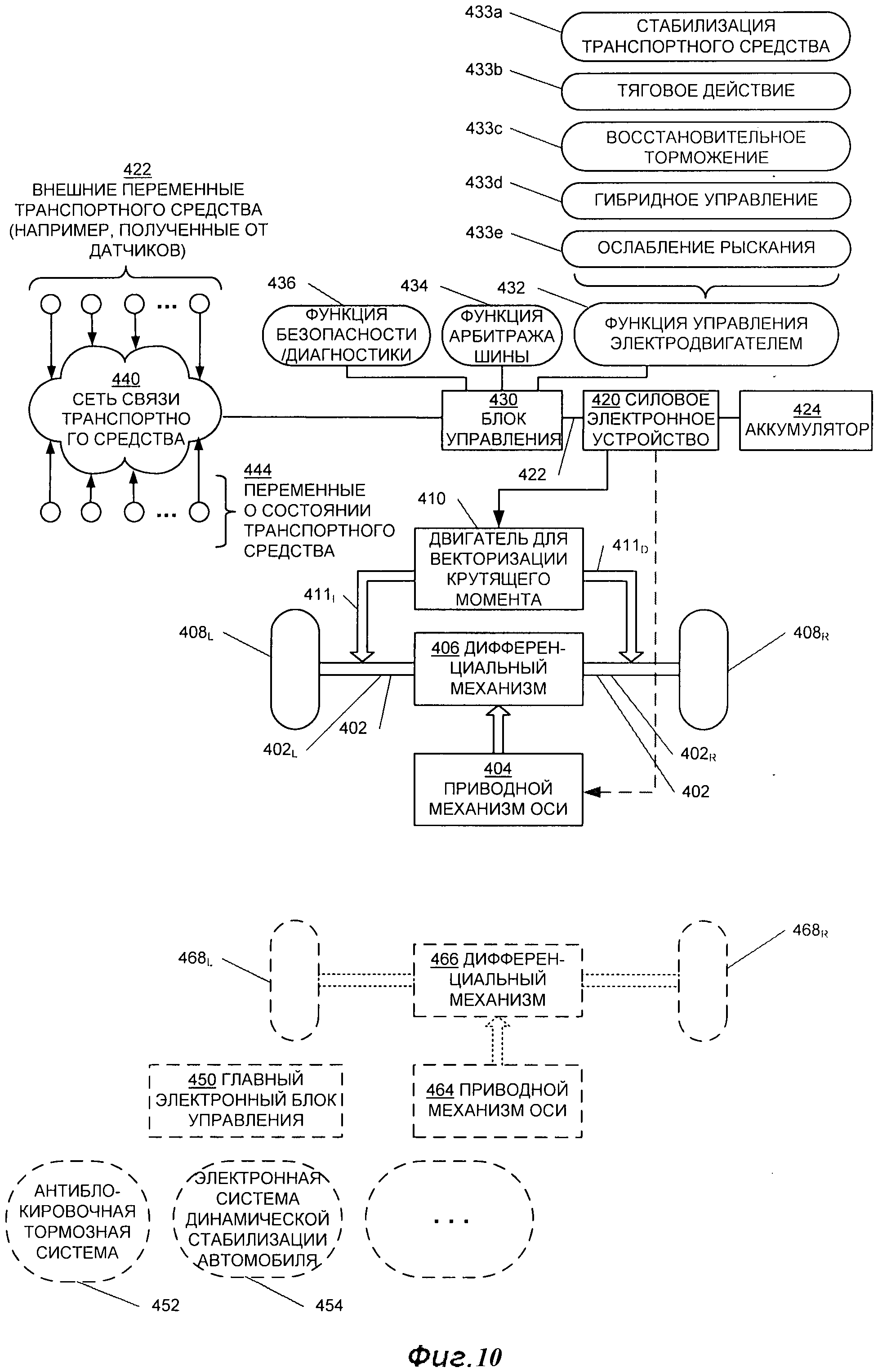
на фиг.10 схематически изображена блок-схема, иллюстрирующая, каким образом управляется устройство для перенаправления крутящего момента, изображенное на фиг.7-8, посредством блока управления для управления динамикой транспортного средства.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ РЕАЛИЗАЦИИ
Ниже будут подробно описаны несколько вариантов реализации со ссылками на прилагаемые чертежи для лучшего понимания изобретения специалистами. Однако изобретение может быть реализовано во многих различных формах и его не следует ограничивать представленными в настоящем описании вариантами реализации. Напротив, данные варианты реализации представлены для того, чтобы сделать настоящее описание законченным и полным и показать весь объем изобретения специалистам. Варианты реализации не ограничивают изобретение, которое ограничено только прилагаемой формулой изобретения. Кроме того, терминология, используемая в подробном описании отдельных вариантов реализации, проиллюстрированных на прилагаемых чертежах, не должна быть понята как ограничивающая изобретение.
Примеры конфигураций приводной схемы транспортного средства изображены на фиг.1-6. В этих вариантах транспортное средство 10 содержит переднюю ось 12, соединенную с задней осью 14, устройство 16 для перенаправления крутящего момента. Как изображено на фиг.1, передняя ось 12 управляется посредством трансмиссии 18, а задняя ось 14 управляется посредством электродвигателя 20. Устройство 16 для перенаправления крутящего момента установлено на задней оси 14. На фиг.2 изображена похожая конфигурация, но в этом случае задняя ось управляется посредством трансмиссии 18, а передняя ось управляется посредством электродвигателя 20. Соответственно, устройство 16 для перенаправления крутящего момента установлено на передней оси. На фиг.3 и 4 изображены конфигурации, в которых передняя ось 12 или задняя ось 14 управляется при помощи электродвигателя 20, причем устройство 16 для перенаправления крутящего момента установлено на ведомой оси 12, 14. В качестве еще одного примера, на фиг.5 изображена конфигурация, в которой передняя ось 12 и задняя ось 14 управляются при помощи электродвигателей 20.
На фиг.6 изображена базовая компоновка устройства 100 для перенаправления крутящего момента. Ведущая ось 110 транспортного средства управляется посредством трансмиссии 120 и содержит два колеса 112а, 112b, соединенные с противоположными концами оси 110. Трансмиссия 120 соединена с дифференциальным механизмом 130, позволяя колесам 112а, 112b вращаться на разных скоростях. Электродвигатель 140 соединен с дифференциальным механизмом 130 для создания разности крутящих моментов на противоположных концах оси 110. Кроме того, управляющие средства 150 соединены с электродвигателем 140 и выполнены с возможностью вычисления и передачи управляющих сигналов к электродвигателю 140.
Когда транспортное средство едет по прямой траектории, оба колеса 112а, 112b вращаются с одинаковой скоростью. В этом случае электродвигатель 140 неподвижен. Когда транспортное средство едет по поверхности, имеющей неравномерное трение, может быть использовано устройство 100 для перенаправления крутящего момента для увеличения тяги ведущей оси 110. В таких случаях управляющие средства 150 передают сигнал к электродвигателю 140, для того чтобы активизировать и приложить крутящий момент. При этом происходит увеличение крутящего момента на одном из концов оси 110 и соответствующее уменьшение крутящего момента на противоположном конце оси 110.
На фиг.7 изображен вариант реализации устройства для перенаправления крутящего момента. Ходовой электродвигатель 200 передает крутящий момент от вращающегося вала 202 к ведущей оси 210 посредством зубчатых колес 204, 205, 206, 207 и 208. Ведущая ось 210 содержит центральную часть 212, первый и второй ведущие валы 214, 216. Центральная часть 212 соединена с первым и вторым ведущими валами 214, 216 посредством двух планетарных передач 220а, 220b. Центральная часть 212 соединена с солнечными шестернями 222, а первый ведущий вал 214 и второй ведущий вал 216 соединены с планетарными передачами 224. Коронная шестерня 226 на наружной поверхности содержит зубья для сцепления с двигателем 230, предназначенным для перенаправления крутящего момента. Двигатель 230 является электродвигателем, который во время работы передает вращение вращающемуся валу 240 посредством оси 232 и зубчатых колес 234, 236. Вращающийся вал 240 проходит вдоль оси вала 210 и содержит первое зубчатое колесо 242, сцепленное с коронной шестерней 226 первой планетарной передачи 220а, и второе зубчатое колесо244, сцепленное с коронной шестерней второй планетарной передачи 220b посредством промежуточного зубчатого колеса 246. Когда двигатель 230, предназначенный для перенаправления крутящего момента, активен, он создает крутящий момент. Следовательно, если двигатель 230 вращается, то будет вызвано противоположное вращение коронных шестерен 226. Следовательно, обеспечено увеличение крутящего момента на одном из ведущих валов 214, 216 и обеспечено уменьшение крутящего момента на другом из указанных ведущих валов 214, 216 посредством планетарных передач 220а, 220b.
Еще в одном варианте реализации изобретения, ходовой электродвигатель 200 может быть установлен в центральной части 212 ведущей оси 210. Однако если ходовой электродвигатель 200 установлен на расстоянии от оси 210, можно получить ряд преимуществ. Например, такое расположение облегчит реализацию средств механического разъединения ходового электродвигателя 200, о котором далее будет подробно описано. Более того, планетарные передачи 220а, 220b могут быть сделаны небольшими, так как не требуется их соответствие размерам ходового электродвигателя 200. Еще одно преимущество состоит в том, что упрощено охлаждение оси 210, поскольку обеспечивается легкий доступ к ходовому электродвигателю 200, если он установлен на расстоянии от оси 210.
На фиг.8 изображен еще один вариант реализации устройства для перенаправления крутящего момента. Электродвигатель (не показан) передает крутящий момент к ведущей оси 310 через дифференциал 320. Крутящий момент одинаково распределяется между первым и вторым ведущими валами 314, 316 при помощи дифференциала 320. Первый ведущий вал 314 обеспечен зубчатым колесом 318, имеющим наружные зубья и установленным с возможностью вращения вокруг той же самой центральной оси, что и первый ведущий вал 314. Второй ведущий вал 316 обеспечен зубчатым колесом 319, имеющим наружные зубья и установленным с возможностью вращения вокруг той же самой центральной оси, что и второй ведущий вал 316.
Двигатель 330, предназначенный для перенаправления крутящего момента, обеспечен для передачи крутящего момента от первого ведущего вала 314 ко второму ведущему валу 316, и наоборот. Двигатель 330, предназначенный для перенаправления крутящего момента, соединен с солнечной шестерней 342 планетарной передачи 340. Коронная шестерня 346 соединена с первым ведущим валом 314 при помощи шестерен 318, 348. Кроме того, водило 344 планетарной передачи соединено со вторым ведущим валом 316 посредством вала 350 и зубчатых колес 319, 349.
Когда двигатель 330, предназначенный для перенаправления крутящего момента, активен, он передает противоположный крутящий момент к зубчатым колесам 318, 319. Следовательно, обеспечено увеличение крутящего момента на одном из ведущих валов 314, 316 и соответствующее уменьшение крутящего момента на другом из ведущих валов 314, 316 через планетарную передачу 340.
Если передаточные отношения зубчатых колес 318, 348 и 319, 349, соответственно, соответствуют передаточному числу планетарной передачи 340, то двигатель 330 будет неподвижен, когда первый и второй ведущие валы 314, 316 имеют одинаковую скорость вращения. В таком случае должно быть выполнено следующее условие:
,
Где i1 - это передаточное число между зубчатыми колесами 318, 348, i2 - это передаточное число между зубчатыми колесами 319, 349, r01 и r02 - это опорные радиусы планетарной передачи 340. Вышеуказанные параметры могут быть подобраны для достижения приемлемых требований скорости и крутящего момента двигателя, предназначенного для перенаправления крутящего момента. Например, в особенной конфигурации i1=3, i2=2,67, r01=8, r02=28.
В любом из вышеупомянутых вариантах реализации двигатель 230, 330, предназначенный для перенаправления крутящего момента, может быть реверсивным электродвигателем с переменной скоростью.
Как изображено на фиг.7 и 8, двигатель 230, 330, предназначенный для перенаправления крутящего момента, может быть соединен с устройством 260, 360, обеспечивающим механическую защиту от перегрузки в переходных состояниях транспортного средства, таких как воздействие электронной системы динамической стабилизации автомобиля (ESP). Обеспечена автоматическая муфта 260, 360 для отсоединения двигателя 230, 330, когда скорость вращения превышает пределы заданного значения для отсоединения. Пример такой автоматической муфты 260, 360 изображен на фиг.9. Автоматическая муфта 260, 360 содержит барабан 265 муфты, соединенный с валом 240, 350, и по меньшей мере два рычага 263, соединенные с барабаном 265 посредством поворотных соединений 262. Втулка 261 соединена с двигателем 230, 330, так что скорости вращения, находящиеся ниже значения для отсоединения, передаются от втулки 261 к барабану 265 при помощи трения между рычагами 263 и втулкой 261. Когда скорость вращения достигает значения для отсоединения, центробежная сила, действующая на рычаги 263, превышает усилие пружины, а крутящий момент не передается. Следовательно, центробежная муфта 260, 360 отсоединит двигатель 230, 330 при достижении определенной скорости вращения для того, чтобы защитить его от превышения скорости. В другом примере управляющие средства 150, 420, 430, 440 выполнены с возможностью вызывания автоматического отсоединения муфты 260, 360 на основе анализа, по меньшей мере, одной переменной 442, 444, отражающей текущее состояние транспортного средства. Например, автоматическое отсоединение муфты 260, 360 может быть основано на анализе скорости вращения электродвигателя 230, 330, скорость вращения которого измеряют по меньшей мере одним датчиком, обеспечивающим подачу измеренного значения в виде по меньшей мере одной переменной 442, 444.
Еще в одном варианте реализации обеспечено механическое разъединяющее устройства для ходового электродвигателя 200. Такое механическое разъединяющее устройство может быть приспособлено для отсоединения ходового электродвигателя при достижении определенной скорости или центробежным разъединяющим устройством, подобным муфте, описанной со ссылкой на фиг.9, или, например, кулачковой муфтой или муфтой повышенного трения, управляемыми микропроцессором. В зависимости от типа ходового электродвигателя могут быть большие потери на высоких скоростях, вызванные моментом сопротивления и ослабляющим полем. Посредством отсоединения ходового электродвигателя такие потери могут быть минимизированы, и, следовательно, потенциал экономии топлива может быть максимизирован. Когда ходовой электродвигатель отсоединен, двигатель, предназначенный для перенаправления крутящего момента, можно все равно использовать, что приводит к тому, что его всегда можно использовать для воздействия на стабилизацию транспортного средства. В особенном варианте реализации управляющие средства 150, 420, 430, 440 выполнены с возможностью вызвать автоматической работы механического разъединяющего устройства на основе анализа указанной по меньшей мере одной переменной 442, 444, отражающей текущее состояние транспортного средства, для отсоединения ходового электродвигателя 20, 200, 400 от оси 110, 210, 310, 402.
Между ходовым электродвигателем 200 и ведущей осью 110, 210, 310 может быть установлено зубчатое колесо для изменения скоростей. Зубчатое колесо для изменения скоростей, такое как известная трансмиссия, используется, таким образом, для преобразования скорости и крутящего момента ходового электродвигателя. Преимущество этого состоит в том, что обеспечена работа ходового электродвигателя 200 в диапазоне его оптимальных скоростей, благодаря чему снижается общее энергопотребление транспортного средства.
Для всех описанных до сих пор вариантов реализации предполагается, что двигатель 230, 330, предназначенный для перенаправления крутящего момента, получает управляющие сигналы от управляющих средств, установленных внутри транспортного средства. Управляющие средства выполнены с возможностью получения переменных, относящихся к транспортному средству, и создания соответствующего выходного сигнала, который будет передан к двигателю, предназначенному для перенаправления крутящего момента. Например, управляющие средства содержат интерфейс сети связи транспортного средства, выполненной с возможностью сбора переменных, относящихся к транспортному средству, блок управления, выполненный с возможностью получения указанных переменных и вычисления выходного сигнала. Управляющие средства также содержат силовое электронное устройство, выполненное с возможностью передачи управляющих токов к электродвигателю в ответ на выходной сигнал, предназначенный для управления потоком энергии между источником электроэнергии и электродвигателем. Например, источником питания может быть электрический аккумулятор, наподобие аккумуляторной батареи или топливного элемента, или электрический генератор. В одном частном варианте реализации изобретения, в котором устройство 100, 200, 300 для перенаправления крутящего момента выполнено в транспортном средстве, по меньшей мере частично управляемым посредством двигателя внутреннего сгорания, источник электроэнергии может быть генератором, управляемым посредством указанного двигателя внутреннего сгорания. Еще в одном варианте реализации генератором можно управлять посредством отдельного двигателя внутреннего сгорания. Однако в варианте реализации, описанном в последующих абзацах, источником электроэнергии является электрический аккумулятор.
Далее со ссылками на фиг.10 следует описание того, каким образом устройство для перенаправления крутящего момента согласно любому из вышеуказанных вариантов реализации может быть применено в современном дорожном транспортном средстве, таком как автомобиль. Как изображено на фиг.10, автомобиль 400 содержит первую ось 402, которая управляется посредством приводного механизма 404 первой оси. По существу, как известно, дифференциальный механизм 406, установленный на первой оси 402, позволяет левому ведущему валу 402L первой оси 402 и левому колесу 408L, установленному на нем, вращаться со скоростью, отличающейся от скорости вращения правого ведущего вала 402R первой оси 402, и правого колеса 408R, установленного на нем. Двигатель 410, предназначенный для перенаправления крутящего момента, который, например, может быть реализован как вышеуказанный электродвигатель 140, 230 или 330, установлен для увеличения 411D крутящего момента на одном из ведущих валов 402L, 402R и соответствующего уменьшения 411D крутящего момента на другом из ведущих валов 402L, 402R, как уже объяснялось со ссылками на предыдущие чертежи. Как изображено на фиг.10, увеличение 4111 крутящего момента применено к левому ведущему валу 402L, тогда как уменьшение 411D крутящего момента применено к правому ведущему валу 402R. Однако при изменении вращения двигателя 410 на обратное, ситуация станет противоположной.
Двигателем 410, предназначенным для перенаправления крутящего момента, управляют посредством управляющих токов 412, подаваемых от источника электроэнергии в форме аккумулятора 424 через силовое электронное устройство 420. В свою очередь, силовое электронное устройство 420 управляется посредством по меньшей мере одного управляющего сигнала 422, полученного от блока 430 управления для перенаправления крутящего момента. Амплитуда и полярность управляющих токов 412 будут определять скорость вращения и направление двигателя 410, и, следовательно, величину и направление увеличения/уменьшения крутящего момента 4111/411D, приложенного к левому и правому ведущим валам 402L, 402R.
Как любое электрическое устройство, двигатель 410 может работать не только как электродвигатель, но также может работать как генератор для преобразования механической энергии, полученной от вращения первой оси 402, в электрическую энергию, полученную и сохраненную в аккумуляторе 424. Может быть преимущественным использование рекуперативного торможения для снижения энергопотребления транспортного средства и увеличения периода зарядки аккумулятора 424. Силовое электронное устройство 420 приспособлено для точного управления потоком электроэнергии от аккумулятора 424 к двигателю 410 (когда он работает как двигатель) и от двигателя 410 (когда он работает как генератор) к аккумулятору 424, соответственно. Для этого силовое электронное устройство 420 содержит высокоэффективную полупроводниковую схему, способную к точному управлению управляющими токами 412, подаваемыми к двигателю 410 (когда он работает как двигатель), и генерируемыми токами, подаваемыми к аккумулятору 424 (когда двигатель работает как генератор). Точное управление особенно важно в последнем случае, поскольку при его отсутствии могут быть подвергнуты опасности емкость, срок службы и безопасность аккумулятора 424 (выполненного, например, в форме по меньшей мере одной известной высокоэнергетической литиевой батареи).
В вариантах реализации транспортного средства 400 приводной механизм 404 первой оси тоже может содержать электродвигатель. Кроме того, в таком случае этим электродвигателем 404 можно управлять посредством управляющих токов 414, подаваемых от силового электронного устройства 420, и, наоборот, электродвигатель 404 также можно использовать в качестве генератора для зарядки аккумулятора 424 под управлением силового электронного устройства 420.
Как уже упоминалось, силовое электронное устройство 420, в свою очередь, управляется посредством по меньшей мере одного управляющего сигнала 422, полученного от блока 430 управления для перенаправления крутящего момента. Блок 430 управления, который может быть схожим с вышеупомянутыми управляющими средствами 150, предпочтительно может быть реализован как микропроцессор (программируемый логический контроллер (PLC), центральный процессор (CPU), цифровой процессор (DPS) или другое подходящее устройство для обработки, такое как электронная вентильная матрица (EPGA) или специализированная интегральная схема (ASIC), или любая другая подходящая цифровая и/или аналоговая схема, способная выполнять указанные задачи. Для осуществления управления двигателем 410 и генерации управляющих сигналов 422, блок 430 управления запрограммирован или другим образом обеспечен средствами 432 управления электродвигателем.
Средства 432 управления электродвигателем блока 430 выполнены с возможностью вычисления в режиме реального времени различных управляющих переменных, которые, в свою очередь, определяют управляющие сигналы 442 на основании текущего состояния транспортного средства. С этой целью данные о состоянии транспортного средства в форме внешних переменных 442 собираются посредством датчиков, распределенных по транспортному средству. Внешние переменные 442 транспортного средства постоянно передаются в сеть 440 связи транспортного средства и, следовательно, становятся доступными по данной сети для средств 432 управления электродвигателем. Например, сеть 440 связи транспортного средства может быть совместима с промышленными стандартными протоколами связи, такими как CAN («локальная сеть контроллеров») и/или FLexRay.
Кроме того, данные о состоянии транспортного средства в форме переменных 444 также могут быть получены средствами 432 управления электродвигателем по сети 440 связи. Такие переменные 444 о состоянии транспортного средства могут быть созданы другими устройствами транспортного средства, таким как главный электронный блок 450 управления (ECU), антиблокировочная тормозная система (АБС) 452 или электронная система 454 динамической стабилизации автомобиля (ESP). Электронный блок 450 управления, антиблокировочная тормозная система 452 и электронная система 454 динамической стабилизации автомобиля могут использоваться для управления второй приводной осью 462, содержащей свой собственный приводной механизм 464 (такой как, например, двигатель внутреннего сгорания), дифференциальный механизм 466 и пару колес 468L, 468R. Посредством получения и использования таких переменных 444 о состоянии транспортного средства от других устройств транспортного средства, средствами 432 управления электродвигателем можно обеспечить, что двигателем 410 (и приводным механизмом 404 первой оси, реализованным в виде электродвигателя) будут оптимально управлять с точки зрения энергопотребления, срока службы, устойчивости транспортного средства, показателей тяги и безопасности вождения.
Наоборот, при использовании сети 440 связи транспортного средства блок 430 управления может быть приспособлен для информирования или инструктирования других устройств транспортного средства относительно решений по управлению двигателем 410 (и приводным механизмом 404 первой оси, реализованным в виде электродвигателя). Например, управление приводным механизмом 464 второй оси, реализованным в виде двигателя внутреннего сгорания, может дать преимущество от принятия в расчет такой информации или инструкций, так как это может снизить потребление топлива. Кроме того, могут быть улучшены и сделаны более точными средства системы 454 динамической стабилизации автомобиля (ESP) с использованием данных такого типа, полученных от блока 430 управления.
Таким образом, посредством управления системой для перенаправления крутящего момента вместе с другими системами, например, системой 454 динамической стабилизации автомобиля (ESP) может быть достигнут суммарный эффект. Система для перенаправления крутящего момента может быть управляема при малых разностях скоростей более гладко и более точно, чем может управлять электронная система динамической стабилизации автомобиля (ESP) с использованием двигателя и тормозной системы автомобиля. Следовательно, управляющий сигнал (или сигналы) может быть передан к системе 454 динамической стабилизации автомобиля (ESP), информируя о действиях, выполняемых системой для перенаправления крутящего момента, или запрашивая выполнение от системы динамической стабилизации автомобиля ESP.
Для оптимального потребления топлива в гибридном транспортном средстве электродвигатель и электрическая ведущая ось должны управляться способом, обеспечивающим минимальное потребление топлива. Этого можно достигнуть посредством обеспечения оптимизирующего контроллера в электронном модуле при передаче сигналов от электрической оси, запрашивающей действие от двигателя или передающей запрос от блока управления двигателем к электрической оси.
Примеры управляющих переменных, передаваемых к электродвигателю и/или вычисляемых средствами 432 управления электродвигателем по полученным данным 442, 444 о состоянии транспортного средства, могут включать запрос водителя об увеличении или уменьшении скорости (т.е. положения педали газа или педали тормоза), скорости колес, угла руля, угловой скорости рыскания, поперечном ускорении, ожидаемой скорости транспортного средства, фактических значений проскальзывания шины, действии силы трения на дороге, повышенном/пониженном уровне управления, крутящем моменте и скорости двигателя (для приводного механизма 404 или 464 оси). Предпочтительно, средства 432 управления электродвигателем могут быть выполнены разделенными на множество управляющих программ 433а…433е. Каждая управляющая программа выполнена для управления соответствующим аспектом динамики вождения транспортного средства посредством надлежащего вычисления запросов крутящего момента к двигателю 410, представленных управляющими сигналами 422 к силовому электронному устройству 420, так что двигатель 410 будет приведен в действие соответственно для получения требуемого изменения в распределении крутящего момента между левым и правым ведущими валами 402L, 402R.
Как изображено на фиг.10, не ограничивающими примерами управляющих программ, включенных в средства 432 управления электродвигателем, являются: средства 433а обеспечения устойчивости транспортного средства, средства 433b обеспечения тяги, средства 433 с обеспечения рекуперативного торможения, средства 433d обеспечения гибридного управления и средства 433 обеспечения ослабления рыскания. В раскрытом варианте реализации все или по меньшей мере некоторые из указанных программ 433а…433е управления выполняются параллельно друг другу. Другими словами, блок 430 управления способен выполнять управляющие программы 433а…433е в многозадачном режиме. Одновременное выполнение управляющих программ 433а…433е обеспечивает широкое, гибкое и всестороннее управление динамикой транспортного средства, которая имеет по существу сложную природу.
Дополнительно к средствам 432 управления электродвигателем, блок 430 управления запрограммирован или другим образом обеспечен арбитражными средствами 434 и средствами 436 безопасности/диагностики.
Назначением арбитражных средств 434 является обработка ситуаций, в которых запросы крутящего момента сделаны одновременно от разных управляющих программ из указанных управляющих программ 433а…433е. Так как каждая управляющая программа создает собственные запросы крутящего момента с учетом частных задач, которые указанная программа должна обрабатывать, бывают ситуации, в которых по меньшей мере два параллельных запроса крутящего момента являются несовместимыми друг с другом и совместно не могут быть удовлетворены. Арбитражные средства 434 выполнены для определения приоритетов таких параллельных запросов и разрешения, комбинирования или запрещения каждого отдельного запроса наиболее подходящим образом. Следовательно, арбитражные средства 434 предотвращают возникновение потенциально опасных ситуаций, когда параллельные запросы крутящего момента друг с другом конфликтуют, без чрезмерного ограничения работы каждой конкретной управляющей программы. В другом варианте реализации, арбитражные средства 434 могут быть выполнены для получения и выполнения инструкций для арбитража от другого устройства транспортного средства (такого как главный электронный блок 450 управления (ECU)), вместо принятия самих арбитражных решений. Кроме того, когда приводной механизм 404 первой оси содержит электродвигатель, управляемый управляющими токами 414 от силового электронного устройства 420, преимущественно, арбитражные средства 434 могут быть приспособлены для осуществления арбитража также для запросов, направленных к электродвигателю 404.
Назначением средств 436 безопасности/диагностики является обработка ошибок, относящихся к входящим данным 442, 444 о состоянии транспортного средства, например, посредством проверок достоверности и компенсацией несоответствий. Более того, средства 436 безопасности/диагностики контролируют состояние и работу двигателя 410, силового электронного устройства 420, аккумулятора 424, а также самого блока 430 и выполнены с возможностью передачи диагностической информации другим устройствам транспортного средства (например, главному электронному блоку 450 управления (ECU)).
Изобретение может быть реализовано в любой подходящей форме, включая оборудование, программное обеспечение, микропрограммное обеспечение или любую их комбинацию. Однако, предпочтительно, изобретение реализовано как компьютерная программа, работающая на одном или более процессорах данных и/или цифровых процессорах сигналов. Элементы и компоненты варианта реализации изобретения могут быть физически, функционально и логически реализованы в любом подходящем виде. В действительности, функциональные средства могут быть реализованы в одном узле, во множестве узлов или как часть других функциональных узлов. В таком случае изобретение может быть реализовано в одном узле или может быть физически или функционально распределено между различными узлами и процессорами.
Следует заметить, что описанные выше варианты реализации могут быть комбинированы без отступления от объема изобретения, определенного прилагаемой формулой изобретения. Несмотря на то что настоящее изобретение в настоящем описании описано со ссылками на конкретные варианты реализации, следует заметить, что изобретение этим не ограничивается. Напротив, изобретение ограничено только прилагаемой формулой изобретения, и также возможны варианты реализации, отличающиеся от вышеуказанных конкретных вариантов и не выходящие за объем прилагаемой формулы изобретения.
В формуле изобретения термин «включающий/содержащий» не исключает наличие других элементов или этапов. Кроме того, несмотря на то, что они перечислены по отдельности, средства, элементы или этапы способа могут быть реализованы, например, одним узлом или процессором. Кроме того, хотя отдельные признаки могут быть включены в разные пункты формулы изобретения, преимущественно, по возможности они могут быть комбинированы, и включение их в разные пункты формулы изобретения не означает, что комбинация признаков не является возможной и/или преимущественной. Кроме того, ссылки в единственном числе не исключают множество. Единственное число существительного, термины "первый», «второй» и т.д. не исключают множество. В формуле изобретения сделаны ссылки только для пояснения и не должны быть поняты как ограничивающие каким-либо образом объем изобретения, определенный в формуле изобретения.
Таким образом, согласно еще одной концепции изобретения в технической области перенаправления крутящего момента представлено устройство. Устройство содержит дифференциальный механизм, расположенный на оси, содержащей первый ведущий вал и второй ведущий вал, узел, создающий крутящий момент и выполненный с возможностью соединения с указанной осью для перенаправления крутящего момента между указанным первым ведущим валом и указанным вторым ведущим валом, и управляющие средства, соединенные с указанным создающим крутящий момент узлом и определяющие величины крутящего момента, который должен быть приложен для снижения разности скоростей вращения между первым ведущим валом и вторым ведущим валом. В предпочтительном варианте реализации данной концепции изобретения создающий крутящий момент узел является узлом торможения, таким как фрикционный тормоз, вязкостная муфта, кулачковая муфта или дисковая муфта. В конкретном варианте реализации создающий крутящий момент узел соединен с управляющими средствами, выполненными с возможностью получения переменных, отражающих текущее состояние транспортного средства и создания выходного сигнала, зависящего от указанных переменных, причем указанный выходной сигнал передается к указанному создающему крутящий момент узлу для снижения разности скоростей вращения между первым ведущим валом и вторым ведущим валом.
Со ссылкой на фиг.7 и 8, возможны следующие модификации устройства для перенаправления крутящего момента согласно вышеупомянутой еще одной концепции изобретения. Создающий крутящий момент узел, т.е. тормоз или муфта, может быть расположен на валу 232 (фиг.7) или 342 (фиг.8) вместо или на одной линии с электродвигателем 230, 330. Так как создающий крутящий момент узел также соединен с неподвижной частью, скорость вращения вала 232, 242 может быть снижена. Если электродвигатель 230, 330 заменен, муфта 260, 360 может быть убрана, поскольку ограничение скорости вращения больше не требуется.
Вязкостная муфта может обеспечить тормозной момент, зависящий от скорости вращения вала 232, 242. Кулачковая муфта может обеспечить сдвоенное отсоединенное или соединенное соединение, т.е. вал 232, 242 или может свободно вращаться, или заблокирован. Фрикционный тормоз или дисковая муфта могут обеспечить постоянное управление крутящим моментом.
Для всех таких создающих крутящий момент узлов скорость вращения вала 232, 242 может быть только снижена или исключена. Следовательно, разность скоростей вращения между колесами транспортного средства может быть только снижена или исключена. Это является противоположным функциональным средствам, когда используется электродвигатель, который обеспечивает увеличение разности скоростей вращения между первым ведущим валом и вторым ведущим валом.
Однако создающий крутящий момент узел, такой как тормоз или муфта может быть дополнен двигателем, предназначенным для перенаправления крутящего момента. В таком варианте реализации устройство может обеспечить тормозной момент выше, чем может обеспечить один электродвигатель.
Реферат
Изобретение относится к устройству для перенаправления крутящего момента в колесном транспортном средстве. Устройство содержит дифференциальный механизм, установленный на оси, содержащей первый ведущий вал и второй ведущий вал, источник электроэнергии, соединенный с электродвигателем, выполненным с возможностью соединения с указанной осью для перенаправления крутящего момента между первым ведущим валом и вторым ведущим валом. Управляющие средства соединены с источником электроэнергии и выполнены с возможностью получения переменных, отражающих текущее состояние транспортного средства и определения управляющих токов, зависящих от указанных переменных и поданных в электродвигатель от источника электроэнергии для обеспечения увеличения крутящего момента любого из первого и второго ведущих валов. Достигаются облегчение и удешевление устройства. 2 н. и 11 з.п. ф-лы, 10 ил.
Формула
дифференциальный механизм (130, 220а, 220b, 320, 406), содержащий дифференциал, установленный на оси (110, 210, 310, 402), которая содержит первый ведущий вал (214, 314, 402L) и второй ведущий вал (216, 316, 402R),
источник (424) электроэнергии, соединенный с электродвигателем (140, 230, 330, 410), выполненным с возможностью соединения с указанной осью (110, 210, 310, 402) для перенаправления крутящего момента между первым ведущим валом (214, 314, 402L) и вторым ведущим валом (216, 316, 402R), причем
электродвигатель (140, 230, 330, 410) соединен с первым ведущим валом (314) и вторым ведущим валом (316) посредством планетарной передачи (340) и выполнен с возможностью управления солнечной шестерней (342) планетарной передачи (340),
первый ведущий вал (314) соединен с коронной шестерней (346) планетарной передачи (340), а второй ведущий вал (316) соединен с сателлитами (344) планетарной передачи (340),
при этом устройство для перенаправления крутящего момента дополнительно содержит
управляющие средства (150, 420, 430, 440), соединенные с указанным источником (424) электроэнергии и выполненные с возможностью получения переменных (442, 444), отражающих текущее состояние транспортного средства, и определения управляющих токов (412), зависящих от указанных переменных (442, 444) и поданных в электродвигатель (140, 230, 330, 410) от указанного источника (424) электроэнергии для обеспечения увеличения крутящего момента любого из первого и второго ведущих валов (214, 216, 314, 316, 402L, 402R) и соответствующего уменьшения крутящего момента другого из первого и второго ведущих валов (214, 216, 314, 316, 402L, 402R).
дифференциальный механизм (130, 220а, 220b, 320, 406), установленный на оси (110, 210, 310, 402), которая содержит первый ведущий вал (214, 314, 402L) и второй ведущий вал (216, 316, 402R),
источник (424) электроэнергии, соединенный с электродвигателем (140, 230, 330, 410), выполненным с возможностью соединения с указанной осью (110, 210, 310, 402) для перенаправления крутящего момента между первым ведущим валом (214, 314, 402L) и вторым ведущим валом (216, 316, 402R),
ходовой электродвигатель (20, 200, 404), установленный для управления указанной осью (110, 210, 310, 402),
управляющие средства (150, 420, 430, 440), соединенные с указанным источником (424) электроэнергии и выполненные с возможностью получения переменных (442, 444), отражающих текущее состояние транспортного средства, и определения управляющих токов (412), зависящих от указанных переменных (442, 444) и поданных в электродвигатель (140, 230, 330, 410) от указанного источника (424) электроэнергии для обеспечения увеличения крутящего момента любого из первого и второго ведущих валов (214, 216, 314, 316, 402L, 402R) и соответствующего уменьшения крутящего момента другого из первого и второго ведущих валов (214, 216, 314, 316, 402L, 402R), причем
указанный дифференциальный механизм (130, 220а, 220b, 320, 406) содержит первую планетарную передачу (220а), соединенную с первым ведущим валом (214), и вторую планетарную передачу (220b), соединенную со вторым ведущим валом (216), а
указанный электродвигатель (140, 230, 330, 410) соединен с первым ведущим валом (214) и вторым ведущим валом (216) посредством двух зубчатых колес (242, 246), выполненных с возможностью вращения в разных направлениях и соединенных друг с другом посредством вала (240), проходящего вдоль оси (210).
сеть (440) связи транспортного средства, выполненную с возможностью сбора переменных (442, 444),
блок (430) управления, выполненный с возможностью получения указанных переменных (442, 444) и вычисления по меньшей мере одного управляющего сигнала (422), и
силовое электронное устройство (420), выполненное с возможностью получения указанного по меньшей мере одного управляющего сигнала (422) и управления потоком электроэнергии между аккумулятором (424) и электродвигателем (140, 230, 330, 410) посредством подачи указанных управляющих токов (412) через аккумулятор (424).
Комментарии