Дифференциал - RU2397390C1
Код документа: RU2397390C1
Чертежи





Описание
Настоящее изобретение относится к области многопоточных передач, в частности к дифференциальным приводам ведущих осей и колес транспортных средств.
Известна схема цилиндрического дифференциала, где средние сателлиты, зацепляющиеся между собой, выполнены эллиптическими. При относительном вращении полуосей и сателлитов передаточное число в пределах одного оборота эллиптических сателлитов получается переменным. Такие механизмы при относительном вращении полуосей создают периодическое увеличение тягового момента на отстающем колесе (Лефаров А.Х. «Дифференциалы автомобилей и тягачей», 1972 г. «Машиностроение», Москва, с.101).
Известный дифференциал с эллиптическими сателлитами конструктивно сложен и имеет небольшой блокирующий эффект.
Известен также конический дифференциал с переменным передаточным числом фирмы Тикмен (США), выбранный в качестве ближайшего аналога, содержащий полуосевые шестерни, связанные между собой зубчатым зацеплением, по крайней мере, одним сателлитом, свободно вращающимся на оси, сосной геометрической оси сателлита, закрепленной в корпусе. В данном дифференциале зубья шестерен выполнены со специальным профилем. В результате при вращении сателлита вокруг своей оси его силовое плечо в зацеплении с полуосевой шестерней в пределах шага зубьев непостоянно. Оно поочередно возрастает в зацеплении с одной шестерней и уменьшается в зацеплении с другой. Силовое передаточное число между полуосями в пределах шага зубьев получается переменным (см. там же, стр.101).
Известная конструкция дифференциала сложна, поскольку для изготовления шестерни с переменным передаточным числом, в частности для изготовления специального профиля ее зубьев, требуется дополнительное специальное оборудование и имеется небольшой блокирующий эффект, поскольку увеличение плеча приложения момента сил у известной конструкции возможно только на величину размера зуба.
В основу заявляемого изобретения положена задача создания устройства, осуществляемого в дифференциалах транспортных средств, имеющего достаточно большой диапазон блокирующего эффекта и конструктивно простого.
Указанная задача достигается тем, что в известном дифференциале с выходными валами, кинематически связанными между собой, по крайней мере, одним сателлитом, согласно изобретению сателлит связан с корпусом посредством (при помощи), по крайней мере, одного промежуточного тела, свободно вращающегося в корпусе, соосно геометрической оси сателлита, а сопрягаемые поверхности сателлита и промежуточного тела смещены относительно геометрической оси сателлита.
Упрощение конструкции обеспечивается за счет того, что технология изготовления используемых в заявляемом дифференциале шестерен проста, отработана и не требует для своего изготовления дополнительного оборудования.
В заявляемом дифференциале именно за счет связи сателлита с корпусом, по крайней мере, через одно промежуточное тело, которое свободно вращается в корпусе соосно геометрической оси сателлита и кинематически связано с сателлитом сопрягаемыми поверхностями, выполненными смещенными относительно геометрической оси сателлита, значительно повышается блокирующий эффект. Это обеспечивается благодаря смещению сопрягаемых поверхностей промежуточного тела и сателлита, создающего эксцентриситет, который и дает возможность значительно изменять плечо приложения момента сил.
Конструкция заявляемого дифференциала обеспечивает свободное перемещение внутренних звеньев дифференциала при приложении дополнительного момента противоположного знака на один из выходных валов, но ограничивает возможность обкатывания внутренних звеньев при остановленном одном выходном вале при приложении момента одного знака. Повышение блокирующего эффекта в заявляемом дифференциале основывается на изменении распределения момента от корпуса на эксцентрично расположенные сопрягаемые поверхности сателлита и промежуточного тела. Силовое плечо в зацеплении с полуосевыми шестернями непостоянно за счет эксцентриситета, оно поочередно возрастает в зацеплении с одной шестерней, уменьшаясь в зацеплении с другой. В определенном положении сопрягамых поверхностей относительно корпуса момент от корпуса через промежуточное тело за счет смещения точки давления препятствует вращению сателлита. При движении по дороге с разными сцепными качествами сателлит заявляемого дифференциала автоматически занимает такое положение, которое обеспечивает необходимую разность тяговых колес и движение без буксования.
В дальнейшем изложении настоящее изобретение поясняется подробным описанием конкретного варианта его выполнения со ссылками на прилагаемые чертежи.
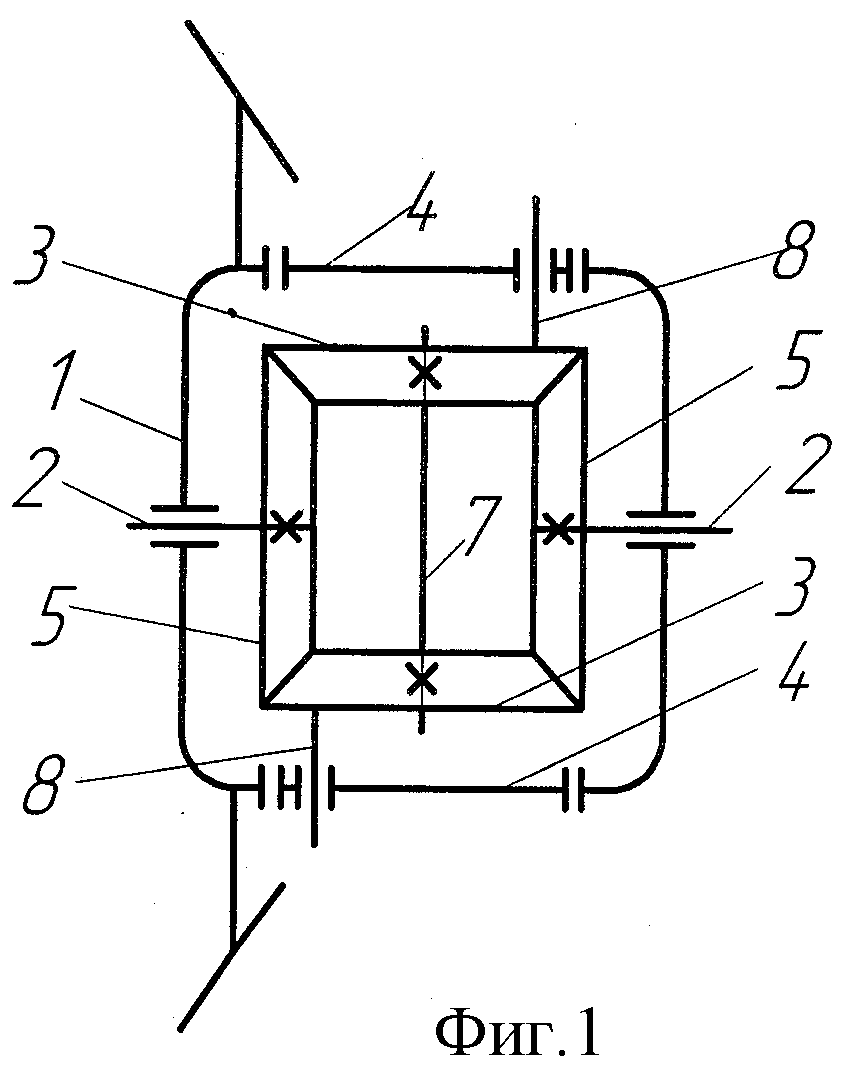
На фиг.1 - кинематическая схема конического дифференциала со смещенными сопрягаемыми поверхностями.
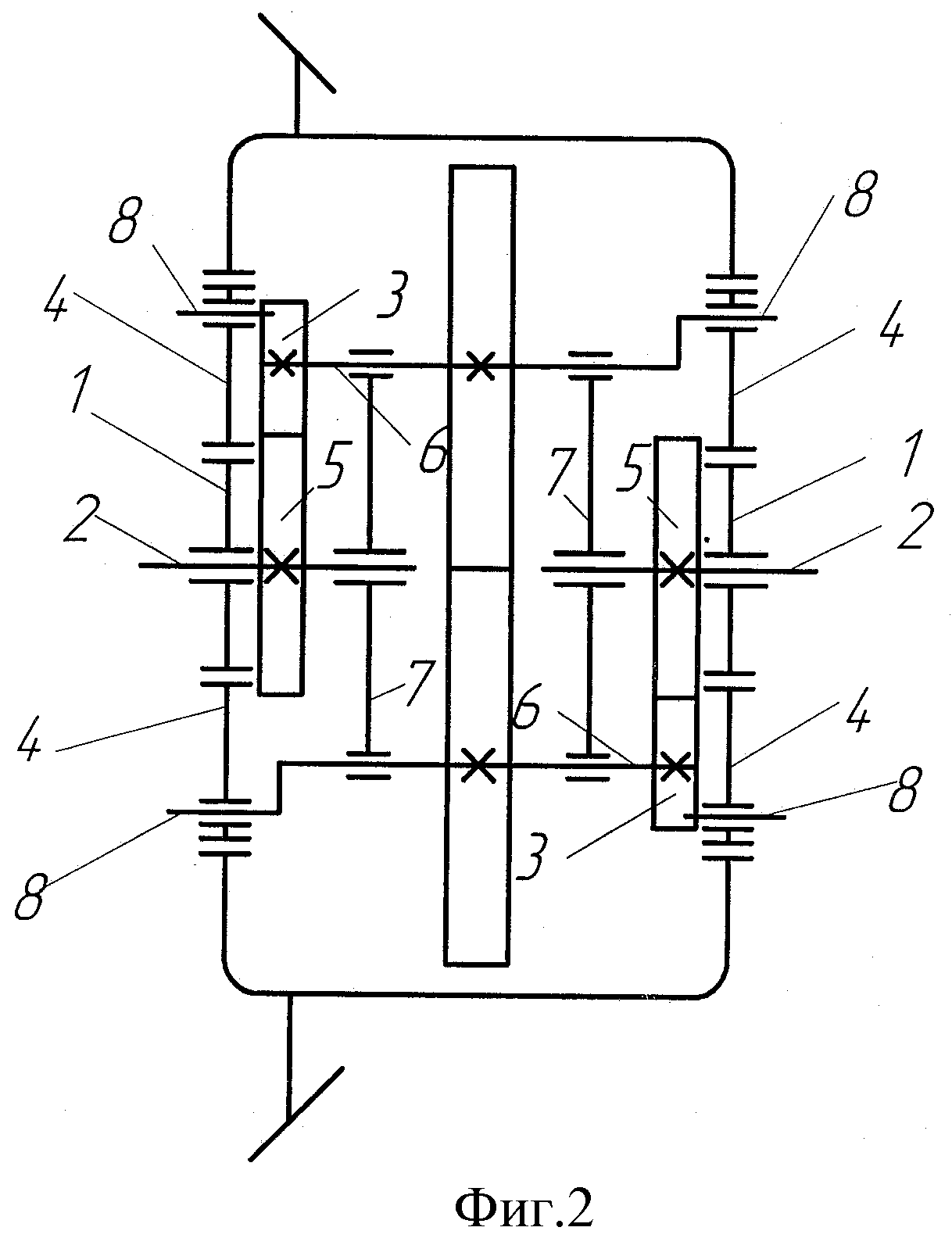
На фиг.2 изображена кинематическая схема цилиндрического дифференциала со смещенными сопрягаемыми поверхностями.
На фиг.3 - продольное сечение заявляемого дифференциала (вариант выполнения промежуточного тела в виде втулки)
На фиг.4 - сечение А-А на фиг.3.
На фиг.5, 6, 7 - возможные варианты выполнения промежуточного тела в кинематической связи с сателлитом: сектор, сегмент и т.п.
На фиг.8 - вариант выполнения сателлита с двумя промежуточными телами (в виде втулки).
Заявляемый эксцентриковый дифференциал АБИК (обозначение АБИК является аббревиатурой слов Автоматическая Блокировка Изобретение Кузевановых) (фиг.3, 4) имеет цилиндрический корпус 1, состоящий из двух половинок, жестко скрепленных болтами на центрирующих штифтах (не обозначены). Корпус 1 имеет два отверстия для выходных валов 2 и четыре радиальных, соосных геометрической оси сателлитов 3 отверстия, в которых свободно вращаются, ограниченные от осевого и радиального смещения промежуточные тела 4, которыми в данном конкретном примере исполнения дифференциала являются втулки (4), имеющие внутреннее отверстие, смещенное относительно геометрической оси сателлитов 3.
Выходные валы 2 соединены с полуосевыми шестернями 5, которые зубчатым зацеплением связаны между собой сателлитами 3, имеющими внутреннюю центрирующую ось 6, соосную геометрической оси сателлитов 3, входящую в отверстие центрирующего элемента 7, не связанного с корпусом 1, который в данном конкретном примере является квадратом, и входящую в отверстие втулки 4 наружную ось 8 с эксцентриситетом, совпадающую со смещенным отверстием втулки 4.
Работает дифференциал следующим образом.
Распределение момента от корпуса 1 осуществляется в заявляемом дифференциале через промежуточное тело - втулку 4.
При остановке одного выходного вала 2 момент от корпуса 1 одного знака передается через втулку 4 на смещенную ось сателлита 3 и в зависимости от расположения этой оси возникает момент, противодействующий вращению сателлитов 3. При появлении дополнительного момента на одном из выходных валов 2, например при забегании колеса на повороте автомобиля или объезде препятствия, окружное усилие на сателлите 3 удваивается и сателлит 3 вращает смещенной осью втулку 4 в корпусе 1 дифференциала.
Целесообразно, чтобы в дифференциале было четыре сателлита для устранения смещения геометрической оси сателлита 3 относительно геометрической оси промежуточного тела 4, находящиеся в зависимости от круговой ориентации смещенных сопрягаемых поверхностей сателлита 3 и промежуточного тела 4 при сборке дифференциала.
Помимо выполнения промежуточного тела в виде втулки 4 возможны различные другие варианты выполнения конфигурации его исполнения с возможностью вращения его в корпусе 1 соосно геометрической оси сателлита 3 (например, усеченный конус, многогранник, втулка с треугольным равноосным контуром и т.п.).
Возможны другие варианты выполнения сопрягаемых поверхностей промежуточного тела 4 и сателлита 3, кроме цилиндрической оси, например вырез-выступ в виде сектора, сегмента, эллипса в цилиндрическом отверстии и т.п.
Возможен вариант выполнения дифференциала с сателлитом 3 с двумя промежуточными телами (4) - втулками 4 (фиг.8).
Возможен другой вариант центрирования сателлитов 3, имеющих внутренние отверстия, соосные геометрической оси сателлитов 3, сопрягаемые с центрирующим элементом 7 в виде крестовины, не связанным с корпусом 1.
Реферат
Изобретение относится к дифференциальным приводам ведущих осей и колес транспортных средств. Дифференциал содержит выходные валы, кинематически связанные между собой, по крайней мере, одним сателлитом. Сателлит связан с корпусом посредством одного промежуточного тела, свободно вращающегося в корпусе соосно геометрической оси сателлита. Сопрягаемые поверхности сателлита и промежуточного тела смещены относительно геометрической оси сателлита. Достигается упрощение конструкции дифференциала. 8 ил.
Комментарии