Бесступенчатая коробка передач - RU2166681C2
Код документа: RU2166681C2
Чертежи


























Описание
Изобретение относится к бесступенчатой коробке передач (вариатору) и более точно к бесступенчатой коробке передач, имеющей такую конструкцию, что мощность, подаваемая на ведущий вал, может быть передана на выходной вал в соответствии с текущим состоянием нагрузки, приложенной к выходному , без выведения из зацепления или переключения передач при смене скорости в положении, при котором все зубчатые колеса находятся в зацеплении, и что передача при вращении в обратном направлении также может быть выполнена бесступенчатой или с фиксированным передаточным числом простым образом.
Как правило, в коробке передач смена скорости выполняется путем выбора одного из ряда заданных передаточных чисел и во время осуществления смены скорости существует проблема тщательного выключения и включения передач. Обычные автоматические коробки передач представляют собой устройства временного типа, которые имеют очень сложную конструкцию, дороги в изготовлении и не могут широко использоваться, поскольку они имеют ограниченный запас мощности из-за износа, шума и проскальзывания.
Настоящее изобретение было сделано для решения указанных выше проблем, следовательно, задачей настоящего изобретения является разработка бесступенчатой коробки передач, в которой не используется сложный механизм, которая позволяет быстро реагировать на изменение нагрузки, плавно передавать вращательное усилие, бесступенчато изменять скорости при прямом вращении (вращении вперед) и обратном вращении с помощью простой конструкции, уменьшить затраты на изготовление и обеспечить повышенный срок службы.
Для достижения этой и других задач настоящее изобретение включает в себя систему переключения передачи (смены скоростей), которая получает мощность, вырабатываемую двигателем, изменяет скорость и передает ее на выходной вал, систему управления переключением передачи (сменой скоростей), которая может автоматически управлять передаточным числом по скорости вращения, соответствующим условию нагрузки выходного вала, и различные 4 типа систем обратного вращения, при которых, в частности, может выполняться бесступенчатая передача обратного вращения.
Если суммировать конструктивные признаки системы смены скоростей, системы управления сменой скоростей и системы обратного вращения, то можно указать, что основным свойством системы смены скоростей является то, что в ней используется составной планетарный механизм, то есть она имеет 2 комплекта шестерен (редуктора), в которых каждый одинаковый элемент (солнечное зубчатое колесо планетарной передачи или зубчатое колесо с внутренним зацеплением) выводится из 2 планетарных комплектов (каждый из которых включает в себя солнечное зубчатое колесо, водило планетарной передачи и зубчатое колесо с внутренним зацеплением) и передает выходному мощность, вводимую с помощью соответствующего комбинированного соединения между структурными элементами (планетарного) комплекта и одновременно с помощью ведущего элемента (ов), выбранного (ых) из 2 комплектов.
В системе управления сменой скоростей используется усовершенствованный гидротрансформатор, который выполнен с усовершенствованиями по сравнению с гидротрансформатором известных автоматических коробок передач. Если рассматривать конструкцию системы управления сменой скоростей, используя терминологию, относящуюся к структурным элементам, используемым в традиционном гидротрансформаторе, то для удобства разъяснения можно указать, что система управления сменой скоростей содержит насосное колесо, которое представляет собой ведущий (приводной) элемент, турбину, которая представляет собой ведомый элемент, статор для повышения вращающего момента, соединительный вал для соединения с системой смены скоростей, вал управления и неподвижную ось для крепления статора.
Система обратного вращения имеет планетарный комплект (солнечное зубчатое колесо, зубчатое колесо с внутренним зацеплением, водило) и тормоз и сконструирована с возможностью выполнения бесступенчатого обратного вращения при соответствующей комбинированной связи между каждым структурным элементом планетарного комплекта и системой смены скоростей.
В качестве сцепления и тормоза, применяемых в системе по настоящему изобретению, могут использоваться многодисковое сцепление, работающее в масляной ванне, и тормоз известной автоматической коробки передач, и в качестве тормоза может использоваться ленточный тормоз, однако сцепление и тормоз не ограничиваются указанными элементами.
Для более полного понимания характера и задач изобретения следует сделать
ссылку на нижеприведенное подробное описание, рассматриваемое совместно с сопровождающими чертежами, на которых:
фиг. 1-10 иллюстрируют первый вариант осуществления бесступенчатой коробки
передач по настоящему изобретению;
фиг. 1 представляет собой схематический чертеж бесступенчатой коробки передач по настоящему изобретению, которая может работать при I состоянии обратного
вращения;
фиг. 2 представляет собой схематический чертеж бесступенчатой коробки передач по настоящему изобретению, которая может работать при II состоянии обратного вращения;
фиг. 3
представляет собой схематический чертеж бесступенчатой коробки передач по настоящему изобретению, которая может работать при III состоянии обратного вращения;
фиг. 4 представляет собой
схематический чертеж бесступенчатой коробки передач по настоящему изобретению, которая может работать при IV состоянии обратного вращения;
фиг. 5 представляет собой функциональное изображение,
показывающее состояние, при котором бесступенчатая коробка передач по настоящему изобретению находится на холостом ходу при нейтральном состоянии;
фиг. 6 представляет собой функциональное
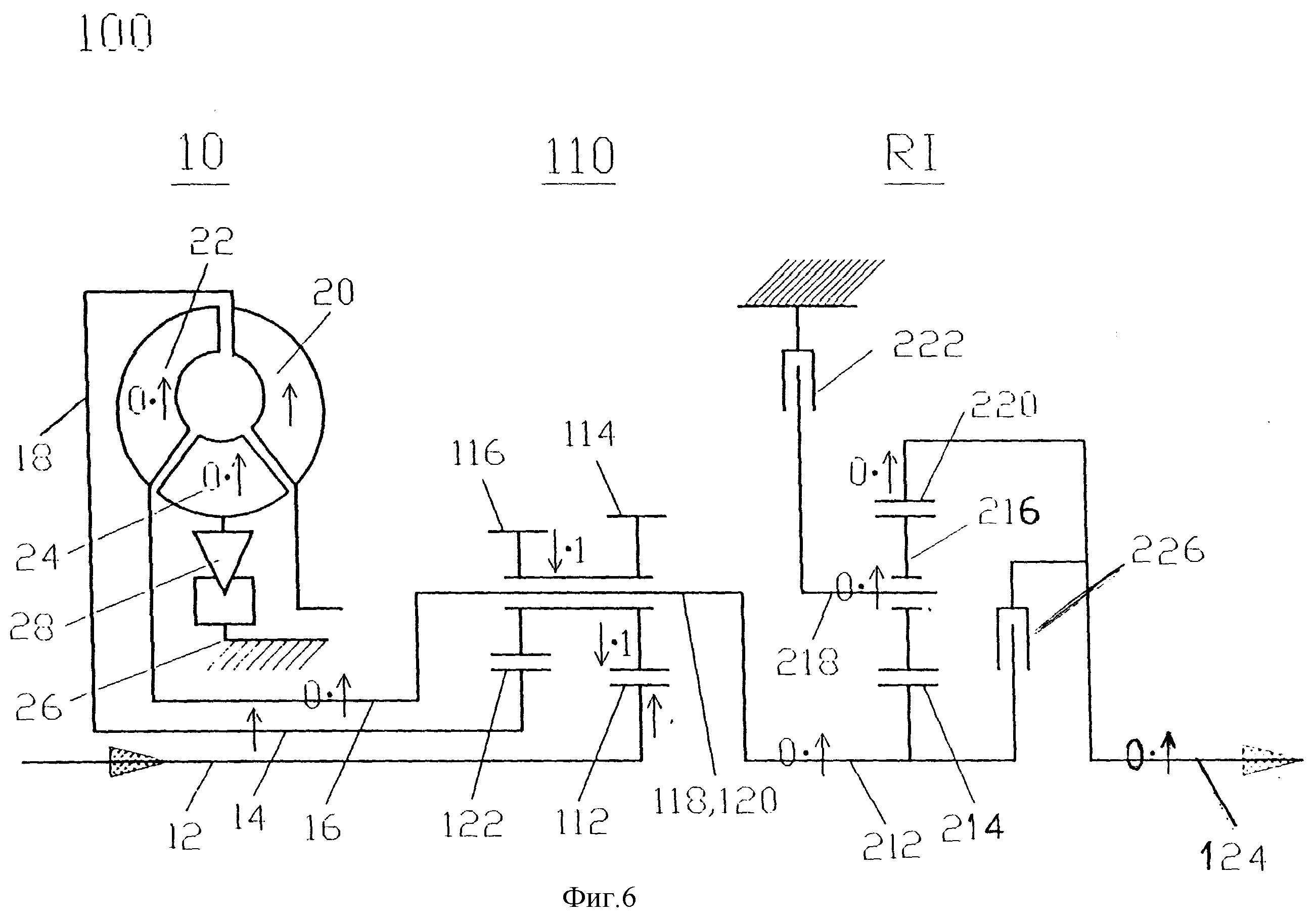
изображение, показывающее состояние прямого вращения в бесступенчатой коробке передач по настоящему изобретению;
фиг. 7 представляет собой функциональное изображение, показывающее I состояние
обратного вращения в бесступенчатой коробке передач по настоящему изобретению;
фиг. 8 представляет собой функциональное изображение, показывающее II состояние обратного вращения в
бесступенчатой коробке передач по настоящему изобретению;
фиг. 9 представляет собой функциональное изображение, показывающее III состояние обратного вращения в бесступенчатой коробке передач
по настоящему изобретению;
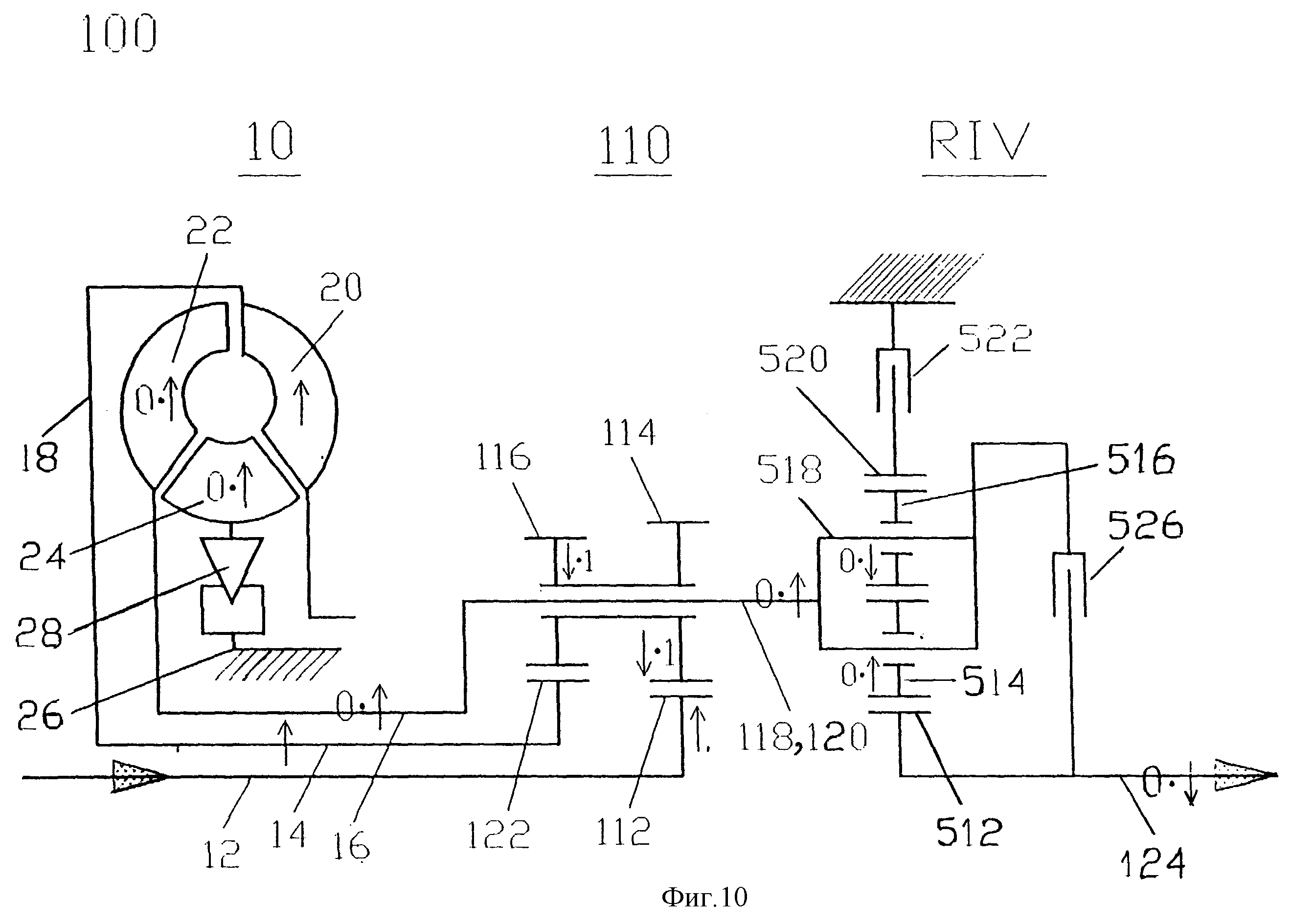
фиг. 10 представляет собой функциональное изображение, показывающее IV состояние обратного вращения в бесступенчатой коробке передач по настоящему изобретению;
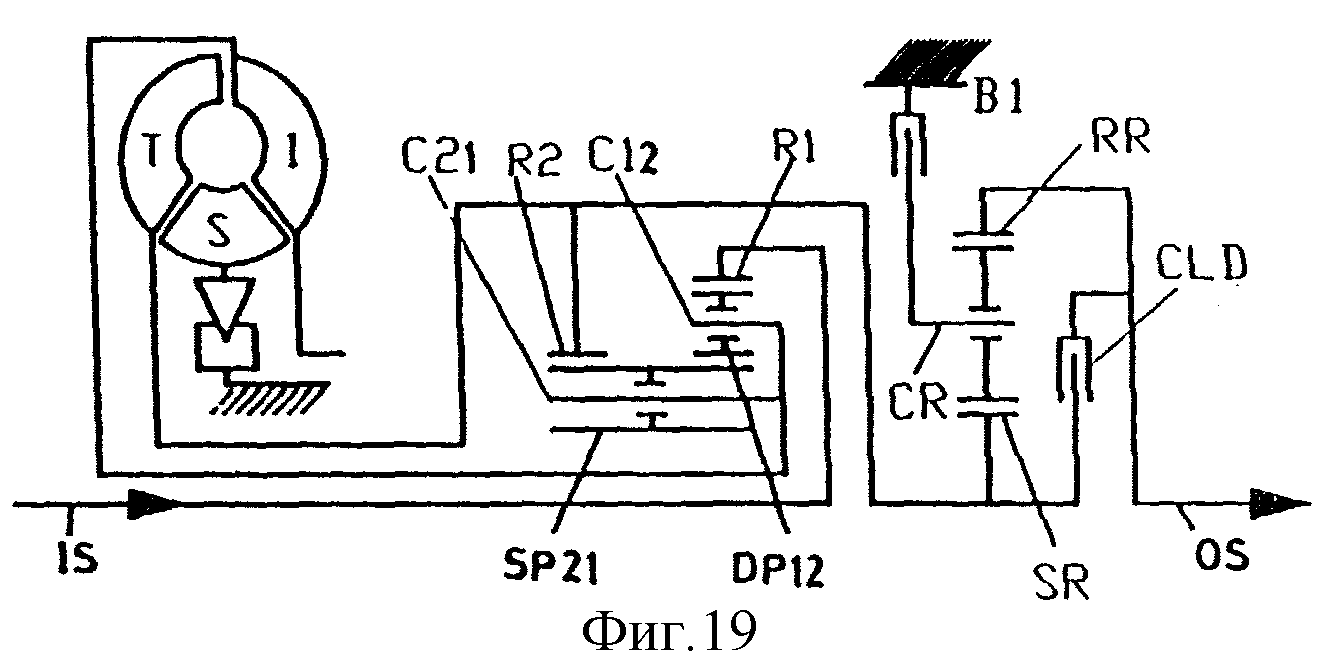
фиг. 11-21 представляют собой схематичные чертежи 2-12 вариантов осуществления бесступенчатой коробки передач по настоящему изобретению.
Для обозначения аналогичных элементов на различных изображениях графических материалов используются аналогичные ссылочные номера и обозначения.
Далее приводится описание бесступенчатой коробки передач, содержащей систему управления сменой скоростей и систему смены скоростей в различных вариантах осуществления, с которой соединена система управления сменой скоростей. То есть система смены скоростей может иметь различные конструкции, и бесступенчатая смена скоростей может осуществляться путем соответствующего соединения системы управления сменой скоростей с системой смены скоростей по различным вариантам осуществления.
Прежде всего, конструкция 100 по первому варианту осуществления настоящего изобретения, состоящая из системы 10 управления сменой скоростей, системы 110 смены скоростей и системы RI ~ RIV обратного вращения, присоединенной к ней, описана подробно со ссылкой на сопровождающие чертежи.
Система 10 управления сменой скоростей
В системе 10
управления сменой скоростей используется обычный гидротрансформатор автоматической коробки передач, который представляет собой хорошо известное устройство. В обычной автоматической коробке передач
мощность, вырабатываемая двигателем, передается в качестве движущей силы на ведущий (приводной) вал коробки передач через гидротрансформатор, в то время как в конструкции по настоящему изобретению
мощность, вырабатываемая двигателем, передается непосредственно на ведущий вал, и вращательное усилие ведущего вала передается на насосное колесо в виде большого вращательного усилия благодаря
уменьшению скорости вращения с помощью комплекта шестерен.
В то время, как гидротрансформатор обычной автоматической коробки передач выполняет функцию передачи мощности, заключающуюся в получении мощности, вырабатываемой двигателем, и непосредственной передаче мощности на ведущий вал автоматической коробки передач, система управления сменой скоростей по настоящему изобретению выполняет две функции, одна из которых заключается в управлении отношением скоростей для согласования его с сопротивлением движению, а другая заключается в передаче мощности, "проходящей" через систему управления сменой скоростей, на выходной вал.
Ниже подробно описана конструкция системы 10 управления сменой скоростей. Как показано на фиг. 1, полый соединительный вал 14 коаксиально установлен на ведущем вале 12, и полый вал 16 управления коаксиально установлен на соединительном вале 14. Картер 18 насосного колеса выполнен за одно целое с соединительным валом 14, и насосное колесо 20 выполнено за одно целое с картером 18 насосного колеса. Турбинное колесо 22, обращенное к насосному колесу 20, объединено в одно целое с валом 16 управления, между насосным колесом 20 и турбинным колесом 22 размещен статор 24, полая неподвижная ось 26 коаксиально установлена на валe 16 управления внутри статора 24, и муфта 28 свободного хода вставлена между статором 24 и неподвижной осью 26 для предотвращения обратного вращения статора 24.
Система 110 смены скоростей
Как показано на фиг. 1, в системе 110 смены скоростей по первому варианту
осуществления настоящего изобретения, входное (ведущее) солнечное зубчатое колесо 112 выполнено за одно целое с ведущим валом 12, на который подается мощность двигателя. Первый сателлит 114
планетарной передачи находится в зацеплении с наружной стороной ведущего солнечного зубчатого колеса 112, и второй сателлит 116 планетарной передачи выполнен за одно целое с первым сателлитом 114
планетарной передачи. Первый сателлит 114 планетарной передачи и второй сателлит 116 планетарной передачи установлены на выходных (ведомых) водилах 118, 120 с возможностью свободного вращения.
Управляющее солнечное зубчатое колесо 122 находится в зацеплении со вторым сателлитом 116 планетарной передачи и выполнено за одно целое с соединительным валом 14.
С другой стороны, выходной вал 124 установлен коаксиально с ведущим валом 212 и соединен с ведомыми водилами 118, 120 посредством муфты прямого включения системы обратного вращения, которая установлена между ведомыми водилами 118, 120 и выходным валом 124. Ведомые водила 118, 120 объединены в одно целое с валом 16 управления, который объединен в одно целое с турбинным колесом 22 системы управления сменой скоростей.
Система (RI ~ RIV) обратного вращения
Далее описана система обратного вращения в первом варианте осуществления настоящего изобретения.
В настоящем изобретении предусмотрены 4 различных системы обратного вращения. Только для справки можно указать на то, что система обратного вращения может быть установлена на линии передачи мощности, присоединенной к насосному колесу для передачи обратного вращения с фиксированным передаточным отношением, однако описание конструкции и работы такой системы обратного вращения опущено.
1. Система RI обратного вращения
Как показано на фиг. 1, система RI обратного вращения предусмотрена между выходным валом 124 и выходными (ведомыми) водилами 118, 120 системы 110 смены
скоростей. Вал 212 солнечного зубчатого колеса системы обратного вращения соединен с ведомыми водилами 118, 120 системы 110 смены скоростей с образованием одного целого с ними, и солнечное зубчатое
колесо 214 системы обратного вращения выполнено за одно целое с валом 212 солнечного зубчатого колеса системы обратного вращения. Сателлит 218 планетарной передачи системы обратного вращения находится
в зацеплении с наружной стороной солнечного зубчатого колеса 214 системы обратного вращения и установлен на водиле 218 системы обратного вращения с возможностью свободного вращения. Зубчатое колесо
220 с внутренними зубьями системы обратного вращения находится в зацеплении с наружной стороной сателлита 216 планетарной передачи системы обратного вращения и выполнено за одно целое с выходным валом
124. Тормоз 222 системы обратного вращения установлен на наружной стороне водила 218 планетарной передачи системы обратного вращения. Муфта 226 прямого включения установлена между выходным валом 124 и
валом 212 солнечного зубчатого колеса системы обратного вращения таким образом, что ведомые водила 118 и 120 и выходной вал 124 могут быть соединены при приведении в действие муфты 226 прямого
включения.
Зубчатый механизм, образующий данную систему RI обратного вращения, представляет собой механизм с одноступенчатой планетарной передачей.
2. Система RII
обратного вращения
Как показано на фиг. 2, система RII обратного вращения предусмотрена между выходным валом 124 и ведомыми (выходными) водилами 118, 120 системы 110 смены скоростей.
Солнечное зубчатое колесо 312 системы обратного вращения выполнено за одно целое с выходным валом 124. Сателлит 314 планетарной передачи системы обратного вращения находится в зацеплении с наружной
стороной солнечного зубчатого колеса 312 системы обратного вращения и установлен на водило 316 системы обратного вращения с возможностью свободного вращения. Зубчатое колесо 318 с внутренними зубьями
системы обратного вращения находится в зацеплении с наружной стороной сателлита 314 планетарной передачи системы обратного вращения и соединено с образованием одного целого с ведомыми водилами 118,
120 системы 110 смены скоростей. Тормоз 320 системы обратного вращения установлен на наружной стороне водила 316 системы обратного вращения. Муфта 324 прямого включения установлена между ведомыми
водилами 118, 120 и выходным валом 124 таким образом, что ведомые водила 118, 120 и выходной вал 124 могут быть соединены при приведении в действие муфты 324 прямого включения.
Зубчатый механизм, образующий данную систему RII обратного вращения, представляет собой механизм с одноступенчатой планетарной передачей.
3. Система RIII обратного вращения
Как показано на фиг. 3, система RIII обратного вращения предусмотрена между выходным валом 124 и ведомыми (выходными) водилами 118, 120 системы 110 смены скоростей. Вал 412 солнечного зубчатого колеса
системы обратного вращения соединен с ведомыми водилами 118, 120 системы 110 смены скоростей с образованием одного целого, и солнечное зубчатое колесо 414 системы обратного вращения выполнено за одно
целое с валом 412 солнечного зубчатого колеса системы обратного вращения. Сателлит 416 планетарной передачи системы обратного вращения находится в зацеплении с наружной стороной солнечного зубчатого
колеса 414 системы обратного вращения, и другой сателлит 418 планетарной передачи системы обратного вращения находится в зацеплении и рядом с сателлитом 416 планетарной передачи системы обратного
вращения. Эти два сателлита 416, 418 планетарной передачи системы обратного вращения установлены на водило 420 системы обратного вращения с возможностью свободного вращения. Водило 420 системы
обратного вращения выполнено за одно целое с выходным валом 124. Зубчатое колесо 422 с внутренними зубьями системы обратного вращения находится в зацеплении с наружной стороной сателлита 418
планетарной передачи системы обратного вращения, и тормоз 424 системы обратного вращения установлен у наружной стороны зубчатого колеса 422 с внутренними зубьями системы обратного вращения. Муфта 428
прямого включения установлена между валом 412 солнечного зубчатого колеса системы обратного вращения и водилом 420 системы обратного вращения таким образом, что ведомые водила 118, 120 и выходной вал
124 могут быть соединены при приведении в действие муфты 428 прямого включения.
Зубчатый механизм, образующий данную систему RIII обратного вращения, представляет собой механизм с двухступенчатой планетарной передачей.
4. Система RIV обратного вращения
Как показано на фиг. 4, система RIV обратного вращения предусмотрена между выходным валом 124 и
ведомыми (выходными) водилами 118, 120 системы 110 смены скоростей. Солнечное зубчатое колесо 512 системы обратного вращения выполнено за одно целое с выходным валом 124. Сателлит 514 планетарной
передачи системы обратного вращения находится в зацеплении с наружной стороной солнечного зубчатого колеса 512 системы обратного вращения, и другой сателлит 516 планетарной передачи системы обратного
вращения находится в зацеплении (и) рядом с сателлитом 514 планетарной передачи системы обратного вращения. Эти два сателлита 514, 516 планетарной передачи системы обратного вращения установлены на
водиле 518 системы обратного вращения с возможностью свободного вращения, и водило 518 системы обратного вращения соединено с ведомыми водилами 118, 120 системы 110 смены скоростей с образованием
одного целого. Зубчатое колесо 520 с внутренними зубьями системы обратного вращения находится в зацеплении с наружной стороной сателлита 516 планетарной передачи системы обратного вращения, и тормоз
522 системы обратного вращения установлен у наружной стороны зубчатого колеса 520 с внутренними зубьями системы обратного вращения. Муфта 526 прямого включения установлена между водилом 518 системы
обратного вращения и выходным валом 124 таким образом, что ведомые водила 118, 120 и выходной вал 124 могут быть соединены при приведении в действие муфты 526 прямого включения.
Зубчатый механизм, образующий данную систему RIV обратного вращения, представляет собой механизм с двухступенчатой планетарной передачей.
Каждая муфта 226, 324, 428, 526 прямого включения в системе RI ~ RIV обратного вращения предназначена для того, чтобы заставить ведомые (выходные) водила 118, 120 и выходной вал 124 соединяться в одно целое за счет приведения муфты в действие в состоянии прямого вращения, однако муфты не приводятся в действие в состоянии обратного вращения.
Ниже описаны способы работы и процесс передачи мощности в соответствии с этими способами для каждого состояния смены скоростей (нейтрального, прямого вращения и обратного вращения) бесступенчатой коробки передач по настоящему изобретению с описанной выше конструкцией.
Перед разъяснением следует отметить, что несмотря на то, что бесступенчатая коробка передач (вариатор) по настоящему изобретению может быть использована в любом механизме, в котором осуществляется смена скоростей и результатом работы которого является движущая сила, таком, как автомобили и производственные установки, в качестве примера в данной заявке разъясняется работа автомобиля.
С целью определения терминов указывается на то, что вращение (поворот) каждого сателлита планетарной передачи означает вращение вокруг его собственной оси (в данном случае стопорного штифта), а оборот означает случай, когда вращается водило, то есть ситуацию, при которой обычно сателлит планетарной передачи выполняет сложное вращательно-поступательное движение.
Кроме того, для удобства разъяснения направление вращения против часовой стрелки, если смотреть с левой стороны чертежей, принято за направление (вращения) ведущего вала, направление вращения, аналогичное направлению вращения ведущего вала, обозначается как направление








Способ работы для нейтрального состояния и состояния прямого вращения описан на основе конструкции, с которой объединена система RI обратного вращения.
1. Нейтральное состояние (фиг. 5): выходной вал 124 остановлен.
Ведущий вал




Управляющее солнечное зубчатое колесо







Вал 212 солнечного зубчатого колеса системы обратного вращения

Солнечное зубчатое колесо 214 системы обратного вращения



Нейтральное состояние - это состояние, в котором муфта 226 прямого включения расцеплена и тормоз 222 системы обратного вращения отпущен, выходной вал 124 не может приводиться во вращение за счет мощности двигателя, система находится на холостом ходу, как показано на фиг. 5. То есть, если муфта 226 прямого включения, которая установлена между выходным валом 124 и валом 212 солнечного зубчатого колеса системы обратного вращения, образующим одно целое с ведомыми водилами 118, 120, отключена, не происходит передачи мощности между системой 110 смены скоростей и выходным валом 124.
Ведущий вал 12 вращается при подаче на него мощности двигателя, ведущее солнечное зубчатое колесо 112, выполненное за одно целое с ведущим валом 12, также вращается в направлении A, одинаковом с направлением вращения ведущего вала 12, и первый сателлит 114 планетарной передачи, находящийся в зацеплении с ведущим солнечным зубчатым колесом 112, вращается в направлении B, противоположном направлению вращения ведущего солнечного зубчатого колеса 112. Второй сателлит 116 планетарной передачи, выполненный за одно целое с первым сателлитом 114 планетарной передачи, приводится во вращение в направлении В, и управляющее солнечное зубчатое колесо 122, находящееся в зацеплении с внутренней стороной второго сателлита 116 планетарной передачи, приводится во вращение в направлении A, противоположном направлению вращения второго сателлита 116 планетарной передачи. Соединительный вал 14, соединенный c управляющим солнечным зубчатым колесом 122 с образованием одного целого, картер 18 насосного колеса, присоединенный к соединительному 14, и насосное колесо 20, выполненное за одно целое с картером 18 насосного колеса, приводятся во вращение в направлении A.
Турбинное колесо 22, установленное таким образом, что оно обращено к насосному колесу 20, приводится во вращение в направлении A за счет потока жидкости, вал 16 управления, соединенный с турбинным колесом 22 с образованием одного целого, приводится во вращение в направлении A, и ведомые водила 118, 120, соединенные с валом 16 управления с образованием одного целого, приводятся во вращение в направлении A. Вал 212 солнечного зубчатого колеса системы обратного вращения, выполненный за одно целое с ведомыми водилами 118, 120, также приводится во вращение в направлении A, солнечное зубчатое колесо 214 системы обратного вращения, выполненное за одно целое с валом 212 солнечного зубчатого колеса системы обратного вращения, приводится во вращение в направлении A и приводит во вращение сателлит 216 планетарной передачи системы обратного вращения, находящийся в зацеплении с наружной стороной солнечного зубчатого колеса 214 системы обратного вращения, в направлении B. Поскольку выходное (ведомое) зубчатое колесо 220 с внутренними зубьями, находящееся в зацеплении с наружной стороной сателлита 216 планетарной передачи системы обратного вращения, остановлено за счет нагрузки, действующей со стороны выходного вала 124, водило системы обратного вращения вращается на холостом ходу в направлении A.
II. Состояние прямого вращения (фиг. 6)
Ведущий вал


Первый сателлит 114 планетарной передачи

(1) Второй сателлит 116 планетарной передачи








Вал 212 солнечного зубчатого колеса системы обратного вращения


Это состояние, при котором муфта 226 прямого включения, установленная между выходным валом 124 и валом 212 солнечного зубчатого колеса системы обратного вращения, выполненным за одно целое с ведомыми водилами 118, 120, приведена в действие.
Если мощность двигателя подается на ведущий вал 12, ведущее солнечное зубчатое колесо 112, выполненное за одно целое с ведущим валом 12, приводится во вращение в направлении A, аналогичном направлению вращения ведущего вала 12, первый сателлит 114 планетарной передачи, находящийся в зацеплении с ведущим солнечным зубчатым колесом 112, приводится во вращение в направлении B, противоположном направлению вращения ведущего солнечного зубчатого колеса 112, поскольку ведомые водила 118, 120 остановлены за счет нагрузки, действующей со стороны выходного вала 124, соединенного с ними посредством муфты 226 прямого включения. За счет вращения первого сателлита 114 планетарной передачи второй сателлит 116 планетарной передачи, соединенный с первым сателлитом 114 планетарной передачи с образованием одного целого, приводится во вращение в направлении В и замедляет вращение в направлении A управляющего солнечного зубчатого колеса 112, находящегося в зацеплении со вторым сателлитом 116 планетарной передачи. Соединительный вал 14, соединенный с управляющим солнечным зубчатым колесом 122 с образованием одного целого, картер 18 насосного колеса, соединенный c соединительным валом 14 с образованием одного целого, и насосное колесо 20, выполненное за одно целое с картером 18 насосного колеса, замедляются и приводятся во вращение в направлении A.
В данном случае, рассматривая операцию бесступенчатой смены скоростей от низкой ступени передачи до высокой ступени передачи, можно оказать, что при условии, когда выходной вал 124, присоединенный к ведомым водилам 118, 120 за счет приведения в действие муфты 226 прямого включения, вал 16 управления и турбинное колесо 22 остановлены, вращательное усилие, передаваемое первому сателлиту 114 планетарной передачи через ведущее солнечное зубчатое колесо 112, увеличивается с помощью второго сателлита 116 планетарной передачи и передается управляющему солнечному зубчатому колесу 122. Увеличенное вращательное усилие передается через соединительный вал 14, выполненный за одно целое с управляющим солнечным зубчатым колесом 122, и картер 18 насосного колеса, присоединенный к соединительному валу 14 с образованием одного целого, на насосное колесо 20, выполненное за одно целое с картером 18 насосного колеса. В этот момент вследствие того, что турбинное колесо 22 остановлено за счет нагрузки, действующей со стороны выходного вала 124 благодаря приведению в действие муфты 226 прямого включения, имеет место рассогласование вращений между насосным колесом и турбинным колесом.
С учетом характеристик гидротрансформатора увеличенное вращательное усилие насосного колеса 20 передается турбинному колесу 22, и вращательное усилие, переданное турбинному колесу 22, передается выходному валу 124 через вал 16 управления и ведомые водила 118, 120, присоединенные к валу управления c образованием одного целого, и, если сила сопротивления, действующая на выходной вал 124, и вращательное усилие, переданное на турбинное колесо 22, находятся в равновесии, то выходной вал 124 приводится во вращение. Это представляет собой состояние начала движения (трогания) с низкой скоростью.
Если скорость вращения двигателя увеличивается, рассогласование вращений между насосным колесом 20 и турбинным колесом 22 становится больше и, следовательно, увеличивается вращательное усилие, передаваемое турбинному колесу 22, и, если вращательное усилие, переданное турбинному колесу 22, станет больше силы сопротивления, действующей на турбинное колесо 22 за счет нагрузки со стороны выходного вала 124, выходной вал 124 ускоряется до тех пор, пока вращательное усилие турбинного колеса 22, переданное от насосного колеса 20, не придет в равновесие с силой сопротивления, действующей на турбинное колесо 22.
Если выходной вал 124 ускоряется, нагрузка, действующая со стороны выходного вала 124, уменьшается, следовательно, также уменьшается сила сопротивления, действующая на турбинное колесо 22. Если сила сопротивления, действующая на турбинное колесо 22, уменьшается, уменьшается рассогласование вращений между насосным колесом 20 и турбинным колесом 22 до тех пор, пока оно не придет в равновесие с данной силой сопротивления. Следовательно, ускоряется вращение турбинного колеса 22 в направлении A, одинаковом с направлением вращения насосного колеса 20, а также ускоряется вращение в направлении A ведомых водил 118, 120, соединенных с турбинным колесом 22. Вращение выходного вала 124, объединенного в одно целое с ведомыми водилами 118, 120 ускоряется, и, если нагрузка, действующая со стороны выходного вала 124, дополнительно уменьшается вследствие ускорения вращения выходного вала 124, и таким образом нагрузка приходит в равновесие с движущей силой ведущего вала 12, насосное колесо 20 и турбинное колесо 22 приводятся во вращение с передаточным числом 1:1, и первый сателлит 114 планетарной передачи и второй сателлит 116 планетарной передачи не вращаются вокруг своих собственных осей, но все вращающиеся тела вращаются как одно целое. Это представляет собой высокоскоростное состояние.
При данном варианте осуществления, рассматривая вращательное усилие, переданное насосному колесу 20, можно указать на то, что, поскольку вращательное усилие, увеличенное по сравнению с вращательным усилием ведущего вала 12 с помощью первого сателлита 114 планетарной передачи и второго сателлита 116 планетарной передачи, действует на насосное колесо 20 через управляющее солнечное зубчатое колесо 122 и соединительный вал 14 с возможностью передачи его на турбинное колесо 22, то к выходному валу 124 в состоянии (движения) с низкой скоростью будет приложено большое вращательное усилие, тем самым достигается очень хорошее ускорение и КПД.
III. Состояние обратного вращения (фиг. 7 - 10)
1. I состояние обратного вращения (фиг. 7)
Ведущий вал


- Первый сателлит 114 планетарной передачи

(1) Второй сателлит 116 планетарной передачи

Управляющее солнечное зубчатое колесо







Вал 212 солнечного зубчатого колеса системы обратного вращения



(3) Водило 218 системы обратного вращения: остановлено (за счет приведения в действие тормоза системы обратного вращения)
(4) Зубчатое колесо 220 с внутренними зубьями системы обратного вращения


В I состоянии обратного вращения муфта 226 прямого включения отключена, и тормоз 222 системы обратного вращения, установленный на водилах 218 системы обратного вращения, приведен в действие (включен).
Если мощность двигателя подается на ведущий вал 12, ведущее солнечное зубчатое колесо 112, выполненное за одно целое с ведущим валом 12, приводится во вращение в направлении A, аналогичном направлению вращения ведущего вала 12. Поскольку ведомые водила 118, 120, вал 212 солнечного зубчатого колеса системы обратного вращения, соединенный c ведомыми водилами 118, 120 с образованием одного целого, и солнечное зубчатое колесо 214 системы обратного вращения, выполненное за одно целое с валом 212 солнечного зубчатого колеса системы обратного вращения, находятся в мгновенном неподвижном состоянии вместе c выходным валом 124 за счет включения тормоза 222 системы обратного вращения, первый сателлит 114 планетарной передачи, находящийся в зацеплении с ведущим солнечным зубчатым колесом 112, приводится во вращение в направлении B, противоположном направлению вращения ведущего солнечного зубчатого колеса 112, и замедляет и приводит во вращение в направлении А управляющее солнечное зубчатое колесо 122 с помощью второго сателлита 116 планетарной передачи. Кроме того, соединительный вал 14, присоединенный к управляющему солнечному зубчатому колесу 122 с образованием одного целого, картер 18 насосного колеса, выполненный за одно целое с соединительным валом 14, и насосное колесо 20, выполненное за одно целое с картером 18 насосного колеса, замедляются и приводятся во вращение в направлении A.
В данном случае, рассматривая процедуру бесступенчатой смены скоростей, можно указать на то, что водило 218 системы обратного вращения и зубчатое колесо 220 c внутренними зубьями системы обратного вращения, присоединенное к выходному валу 124 с образованием одного целого, находятся в неподвижном состоянии вследствие включения тормоза 222 системы обратного вращения, установленного у наружной стороны водил 218 системы обратного вращения, и, кроме того, вал 212 солнечного зубчатого колеса системы обратного вращения, выполненный за одно целое с солнечным зубчатым колесом 214 системы обратного вращения, ведомые водила 118, 120, соединенные c валом 212 солнечного зубчатого колеса системы обратного вращения с образованием одного целого с ним, и вал 16 управления и турбинное колесо 22, соединенные c ведомыми водилами 118, 120 посредством муфты 226 прямого включения, также находятся в состоянии мгновенной неподвижности. При этом состоянии часть вращательного усилия, переданного первому сателлиту 114 планетарной передачи через ведущее солнечное зубчатое колесо 112, передается управляющему солнечному зубчатому колесу 122 через второй сателлит 116 планетарной передачи и также передается насосному колесу 20 через соединительный вал 14, выполненный за одно целое с управляющим солнечным зубчатым колесом 122 и картером 18 насосного колеса. В этот момент времени, поскольку турбинное колесо 22 остановлено, имеет место разница (рассогласование) вращений между насосным колесом 20 и турбинным колесом 22.
Принимая во внимание характеристики гидротрансформатора, можно оказать, что чем больше рассогласование вращении между насосным колесом 20 и турбинным колесом 22, тем большим становится вращательное усилие, и увеличенное вращательное усилие насосного колеса 20 передается турбинному колесу 22, и, следовательно, вращательное усилие, переданное турбинному колесу 22, передается валу 212 солнечного зубчатого колеса системы обратного вращения и солнечному зубчатому колесу 214 системы обратного вращения через вал 16 управления и ведомые водила 118, 120, соединенные с валом управления с образованием одного целого, и, если сила сопротивления, действующая на солнечное зубчатое колесо 214 системы обратного вращения из-за нагрузки со стороны выходного вала 124 приходит в равновесие c вращательным усилием, переданным турбинному колесу 22, солнечное зубчатое колесо 214 системы обратного вращения приводится во вращение. При вращении солнечного зубчатого колеса 214 системы обратного вращения вращательное усилие передается сателлиту 216 планетарной передачи системы обратного вращения, находящемуся в зацеплении с солнечным зубчатым колесом 214 системы обратного вращения, и поскольку водило 218 системы обратного вращения остановлено из-за включения тормоза 222 системы обратного вращения, сателлит 216 планетарной передачи системы обратного вращения вращается в направлении В, которое противоположно направлению A, и приводит во вращение в направлении В зубчатое колесо 220 с внутренними зубьями системы обратного вращения, находящееся в зацеплении с наружной стороной сателлита 216 планетарной передачи системы обратного вращения. Это представляет собой состояние начала обратного вращения.
Если скорость вращения двигателя увеличивается, рассогласование вращений между насосным колесом 20 и турбинным колесом 22 становится большим, и, следовательно, увеличивается вращательное усилие, передаваемое турбинному колесу 22, и, когда вращательное усилие, переданное турбинному колесу 22, станет больше силы сопротивления, действующей на турбинное колесо 22 через солнечное зубчатое колесо 214 системы обратного вращения за счет нагрузки со стороны выходного вала 124, солнечное зубчатое колесо 214 системы обратного вращения ускоряется до тех пор, пока вращательное усилие турбинного колеса 22, переданное от насосного колеса 20, не придет в равновесие c силой сопротивления, действующей на турбинное колесо 22, и вращение зубчатого колеса 220 с внутренними зубьями системы обратного вращения, выполненного за одно целое с выходным валом 124, ускоряется в направлении B с помощью сателлита 216 планетарной передачи системы обратного вращения.
Если вращение выходного вала 124 ускоряется, то, поскольку нагрузка, действующая со стороны выходного вала 124, уменьшается, также уменьшается сила сопротивления, действующая на турбинное колесо 22 через солнечное зубчатое колесо 214 системы обратного вращения. Если сила сопротивления, действующая на турбинное колесо 22, уменьшается, уменьшается рассогласование вращений между насосным колесом 20 и турбинным колесом 22 до тех пор, пока вращательное усилие не придет в равновесие с силой сопротивления. Следовательно, ускоряется вращение турбинного колеса 22 в направлении A, одинаковом с направлением вращения насосного колеса 20, а также ускоряется вращение в направлении A вала 16 управления, соединенного с турбинным колесом 22 с образованием одного целого, и вращение в направлении A ведомых водил 118, 120, соединенных с валом 16 управления с образованием одного целого. Если ускоряется вращение ведомых водил 118, 120, то также ускоряется вращение вала 212 солнечного зубчатого колеса системы обратного вращения, соединенного с ведомыми водилами 118, 120 с образованием одного целого, и солнечного зубчатого колеса 214 системы обратного вращения, и, кроме того, с помощью сателлита 216 планетарной передачи системы обратного вращения также ускоряется вращение зубчатого колеса 220 с внутренними зубьями системы обратного вращения и выходного вала 124.
Как описано выше, эксплуатационная характеристика I состояния обратного вращения согласно системе RI обратного вращения по настоящему изобретению (аналогично другим системам обратного вращения) заключается в том, что бесступенчатый привод (бесступенчатое движение) в обратном направлении может быть выполнен в соответствии с нагрузкой со стороны выходного вала 124 даже в момент обратного вращения.
Рассматривая вращательное усилие, переданное выходному валу 124 при системе RI обратного вращения по настоящему изобретению, можно указать на то, что вращательное усилие, увеличенное в большей степени по сравнению с вращательным усилием ведущего вала 12 с помощью первого сателлита 114 планетарной передачи и второго сателлита 116 планетарной передачи, передается на управляющее солнечное зубчатое колесо 122, которое воздействует на насосное колесо 20 через соединительный вал 14, и вращательное усилие, дополнительно увеличенное насосным колесом 20, которое воздействует на турбинное колесо 22, также передается солнечному зубчатому колесу 214 системы обратного вращения через вал 16 управления, присоединенный к турбинному колесу 22 с образованием одного целого, и через ведомые водила 118, 120, присоединенные к валу управления и к валу 212 солнечного зубчатого колеса системы обратного вращения с образованием одного целого, и с помощью сателлита 216 планетарной передачи системы обратного вращения приводит во вращение зубчатое колесо 220 с внутренними зубьями системы обратного вращения, выполненное за одно целое с выходным валом 124, и, следовательно, во время обратного вращения выходной вал 124 приводится во вращение большим вращательным усилием, так что увеличивается ускорение и КПД, и может быть обеспечен плавный и бесшумный ход даже во время работы при реверсе.
2. II состояние обратного вращения (фиг. 8)
Ведущий вал


Первый сателлит 114 планетарной передачи









Зубчатое колесо 318 с внутренними зубьями системы обратного вращения

(3) Водило 316 системы обратного вращения: остановлено (за счет приведения в действие тормоза системы обратного вращения)
(4) Сателлит 314 планетарной передачи системы обратного вращения



Во II состоянии обратного вращения муфта 324 прямого включения отключена, и тормоз 320 системы обратного вращения, установленный на водиле 316 системы обратного вращения, включен.
Поскольку направление вращения и процедура передачи мощности при II состоянии обратного вращения по настоящему изобретению при системе 110 смены скоростей и системе 10 управления сменой скоростей такие же, как и при I состоянии обратного вращения, описанном выше для системы RI обратного вращения, то их описание опускается, и здесь описывается только процедура передачи мощности на выходной вал 124 через систему RII обратного вращения.
Как показано на фиг. 8, зубчатое колесо 318 с внутренними зубьями системы обратного вращения, соединенное с ведомыми водилами 118, 120 с образованием одного целого, приводится во вращение в направлении А, одинаковом с направлением вращения ведомых водил 118, 120, за счет вращения ведомых водил 118, 120 системы 110 смены скоростей. Поскольку водило 316 системы обратного вращения остановлено за счет включения тормоза 220 системы обратного вращения, сателлит 314 планетарной передачи системы обратного вращения, находящийся в зацеплении с внутренней стороной зубчатого колеса 318 с внутренними зубьями системы обратного вращения, приводится во вращение в направлении A, одинаковом с направлением вращения зубчатого колеса 318 с внутренними зубьями системы обратного вращения, и приводит во вращение солнечное зубчатое колесо 312 системы обратного вращения, находящееся в зацеплении с внутренней стороной сателлита 314 планетарной передачи системы обратного вращения, в направлении B, противоположном направлению A. Кроме того, выходной вал 124, соединенный с солнечным зубчатым колесом 312 системы обратного вращения с образованием одного целого, приводится во вращение в направлении B за счет вращения солнечного зубчатого колеса 312 системы обратного вращения.
3. III состояние обратного вращения (фиг. 9)
Ведущий вал


Первый сателлит 114 планетарной передачи


Управляющее солнечное зубчатое колесо







Вал 412 солнечного зубчатого колеса системы обратного вращения


(3) Сателлит 418 планетарной передачи системы обратного вращения

(4) Водило 420 системы обратного вращения


При III состоянии системы обратного вращения муфта 428 прямого включения отключена, и тормоз 424 системы обратного вращения, установленный на зубчатом колесе 422 с внутренними зубьями системы обратного вращения, включен.
Поскольку направление вращения и процедура передачи мощности при III состоянии обратного вращения по настоящему изобретению при системе 110 смены скоростей и системе 10 управления сменой скоростей такие же, как и при I состоянии обратного вращения, описанном выше для системы RI обратного вращения, то их описание опускается, и здесь описывается только процедура передачи мощности на выходной вал 124 через систему RIII обратного вращения.
Как показано на фиг. 9, вал 412 солнечного зубчатого колеса системы обратного вращения, присоединенный к ведомым водилам 118, 120 c образованием одного целого с ними, приводится во вращение в направлении A, одинаковом с направлением вращения ведомых водил 118, 120, за счет вращения ведомых водил 118, 120 системы 110 смены скоростей, и также солнечное зубчатое колесо 414 системы обратного вращения, выполненное за одно целое с валом 412 солнечного зубчатого колеса системы обратного вращения, приводится во вращение в направлении A. Солнечное зубчатое колесо 414 системы обратного вращения приводит во вращение в противоположном направлении B сателлит 416 планетарной передачи системы обратного вращения, находящийся в зацеплении с солнечным зубчатым колесом 414 системы обратного вращения, и сателлит 416 планетарной передачи системы обратного вращения приводит во вращение в направлении A другой сателлит 418 планетарной передачи системы обратного вращения, находящийся рядом и в зацеплении с сателлитом 416 планетарной передачи системы обратного вращения. Несмотря на то, что сателлит 418 планетарной передачи системы обратного вращения стремится вращать зубчатое колесо 422 с внутренними зубьями системы обратного вращения, находящееся в зацеплении с наружной стороной сателлита 418 планетарной передачи системы обратного вращения, поскольку зубчатое колесо 422 с внутренними зубьями системы обратного вращения остановлено вследствие включения тормоза 424 системы обратного вращения, сателлит 418 планетарной передачи системы обратного вращения приводит водило 420 системы обратного вращения во вращение в направлении В. Кроме того, выходной вал 124, присоединенный к водилу 420 системы обратного вращения с образованием одного целого, вращается в направлении B.
4.
IV состояние системы обратного вращения (фиг. 10)
Ведущий вал


Первый сателлит 114 планетарной передачи

(1) Второй сателлит 116 планетарной передачи








Водила 518 системы обратного вращения

(3) Сателлит 516 планетарной передачи системы обратного вращения

(4) Сателлит 514 планетарной передачи системы обратного вращения



При IV состоянии системы обратного вращения муфта 526 прямого включения отключена, и тормоз 522 системы обратного вращения, установленный на зубчатом колесе 522 с внутренними зубьями системы обратного вращения, включен.
Поскольку направление вращения и процедура передачи мощности при IV состоянии обратного вращения по настоящему изобретению при системе 110 смены скоростей и системе 10 управления сменой скоростей такие же, как и при I состоянии обратного вращения, описанном выше для системы RI обратного вращения, то их описание опускается, и здесь описывается только процедура передачи мощности на выходной вал 124 через систему RIV обратного вращения.
Как показано на фиг. 10, водило 518 системы обратного вращения, присоединенное к ведомым водилам 118, 120 с образованием с ними одного целого, приводится во вращение в направлении A, одинаковом с направлением вращения ведомых водил 118, 120, за счет вращения ведомых водил 118, 120 системы 110 смены скоростей. Вращение передается сателлитам 514, 516 планетарной передачи системы обратного вращения при вращении водила 518 системы обратного вращения, и поскольку зубчатое колесо 520 с внутренними зубьями системы обратного вращения, находящееся в зацеплении с наружной стороной сателлита 516 планетарной передачи системы обратного вращения, остановлено за счет включения тормоза 522 системы обратного вращения, сателлит 516 планетарной передачи системы обратного вращения приводится во вращение в противоположном направлении B и приводит во вращение в направлении A сателлит 514 планетарной передачи системы обратного вращения, находящийся в зацеплении (и) рядом с ним. Солнечное зубчатое колесо 512 системы обратного вращения, находящееся в зацеплении с внутренней стороной сателлита 514 планетарной передачи системы обратного вращения, вращается в противоположном направлении B и вращает выходной вал 124, присоединенный к нему с образованием одного целого, в том же направлении B.
Далее описываются варианты осуществления настоящего изобретения со 2-го до 12-го. При описании вариантов осуществления настоящего изобретения со 2-го до 12-го, принимая во внимание то, что конструкция и способ работы системы управления сменой скоростей такие же, как в случае системы управления сменой скоростей по первому варианту осуществления, описание конструкции и способа работы системы управления сменой скоростей опускается, и несмотря на то, что имеется различие также в конструкции системы смены скоростей, способ работы или процедура смены скоростей аналогичны способу работы или процедуре смены скоростей по первому варианту осуществления, и, следовательно, подробное описание их опущено. Аналогичным образом, поскольку конструктивный принцип установки системы обратного вращения такой же, как и в первом варианте осуществления, и способ работы и процедура смены скоростей аналогичны первому варианту осуществления, их подробное описание опущено.
Кроме того, несмотря на то, что положения насосного колеса I и турбинного колеса T могут быть изменены в системе управления сменой скоростей, поскольку способ работы и процедура передачи мощности во время смены скорости в системе управления сменой скоростей аналогичны способу работы и процедуре передачи мощности по первому варианту осуществления настоящего изобретения, их описание также опущено.
Следовательно, с учетом аналогичности конструкции, способа работы и процедуры смены скоростей, описанных выше, конструкция каждого варианта осуществления показана схематично для упрощения и удобства разъяснения.
То есть на фиг. 11-21 показаны схематичные чертежи вариантов осуществления со 2-го до 12-го, причем показана конструкция, к которой присоединена система RI обратного вращения.
Несмотря на то, что в системе смены скоростей в основном используется сложный планетарный механизм (редуктор), существуют различия в способе подвода (мощности), способе соединения блока зубчатых колес с насосным колесом и турбинным колесом и способе объединения составляющих элементов конструкции. Однако поскольку способ работы и процедура смены скоростей такие же, как и в первом варианте осуществления, каждый вариант осуществления системы смены скоростей представлен в таблице вместе c соответствующим ему изображением на соответствующем чертеже.
Для ссылки ниже описаны символические обозначения основных элементов, используемые в таблице и на фигурах.
I: насосное колесо Т: турбинное колесо
S: статор B1: тормоз системы обратного вращения
CLD: муфта прямого включения
DP: набор сателлитов двухступенчатой планетарной
передачи
DP12: первый набор сателлитов двухступенчатой планетарной передачи
DP21: второй набор сателлитов двухступенчатой планетарной передачи
SP: набор сателлитов
одноступенчатой планетарной передачи
SP12: первый набор сателлитов одноступенчатой планетарной передачи
SP21: второй набор сателлитов одноступенчатой планетарной передачи
S1: первое солнечное зубчатое колесо
S2: второе солнечное зубчатое колесо
C1: первое водило C2: второе водило
C12, C21: водило планетарной передачи
RI: первое
зубчатое колесо с внутренним зацеплением
R2: второе зубчатое колесо с внутренним зацеплением
SR: солнечное зубчатое колесо системы обратного вращения
CR
: водило планетарной передачи системы обратного вращения
RR: зубчатое колесо с внутренним зацеплением системы обратного вращения
В данном случае порядок индексов 1 и 2
одинаковых элементов на двух блоках передач определяется следующим образом: первый (или правый) обозначается номером 1 и второй (или левый) обозначается номером 2. Две цифры (12 или 21) для индекса
означают интегрированный тип, то есть означают, что элементы соединены друг с другом с образованием одного целого. В данном случае 12 обозначает правую часть и 21 обозначает левую часть. Планетарная
передача, используемая в системе RI ~ RIV обратного вращения, представляет собой одноступенчатую планетарную передачу или двухступенчатую планетарную передачу. Одноступенчатая планетарная передача
включает в себя солнечное зубчатое колесо SR системы обратного вращения, набор сателлитов SP одноступенчатой планетарной передачи, водило CR планетарной передачи системы
обратного вращения и зубчатое колесо RR с внутренним зацеплением системы обратного вращения. Двухступенчатая планетарная передача также включает в себя солнечное зубчатое колесо SR системы обратного вращения, набор сателлитов DP двухступенчатой планетарной передачи, водило CR планетарной передачи системы обратного вращения и зубчатое колесо RR с
внутренним зацеплением системы обратного вращения.
Каждый ссылочный номер в первом варианте осуществления соответствует обозначениям, приведенным в конце описания.
В настоящем изобретении различные варианты осуществления могут быть реализованы путем выполнения солнечного зубчатого колеса, водила, служащего опорой сателлиту, и зубчатого колеса с внутренним зацеплением и путем создания соответствующей комбинации из всех элементов, надлежащего выбора входного (ведущего) элемента и способа задания передаточного числа, и, кроме того, присоединение к турбинному колесу, насосному колесу и тормозу системы обратного вращения может варьироваться, следовательно, объем настоящего изобретения не ограничен вариантами осуществления, показанными в качестве примеров.
Например, 5-й вариант осуществления (такая конструкция обозначена как (T) (I)-(A)) показан на фиг. 14, и в данном случае желательную цель можно достичь с помощью конструкции, в которой боковое расположение (T) (турбинного колеса) и (I) (насосного колеса) изменено на обратное, то есть конструкции (I)(T)-(A), и ее пример показан на фиг. 14A.
Кроме того, даже если входной элемент изменен в отношении симметрии входного (ведущего) элемента, желательная цель также может быть достигнута. А именно пример конструкции (T) (I)-(B), в которой входной (ведущий) элемент изменен с точки зрения симметрии в 5-м варианте осуществления, показан на фиг. 14B, и в данном случае желательная цель может быть достигнута с помощью конструкции, в которой боковое расположение (T) и (I) изменено на обратное, то есть конструкции (I) (T)-(B), и ее пример показан на фиг. 14C.
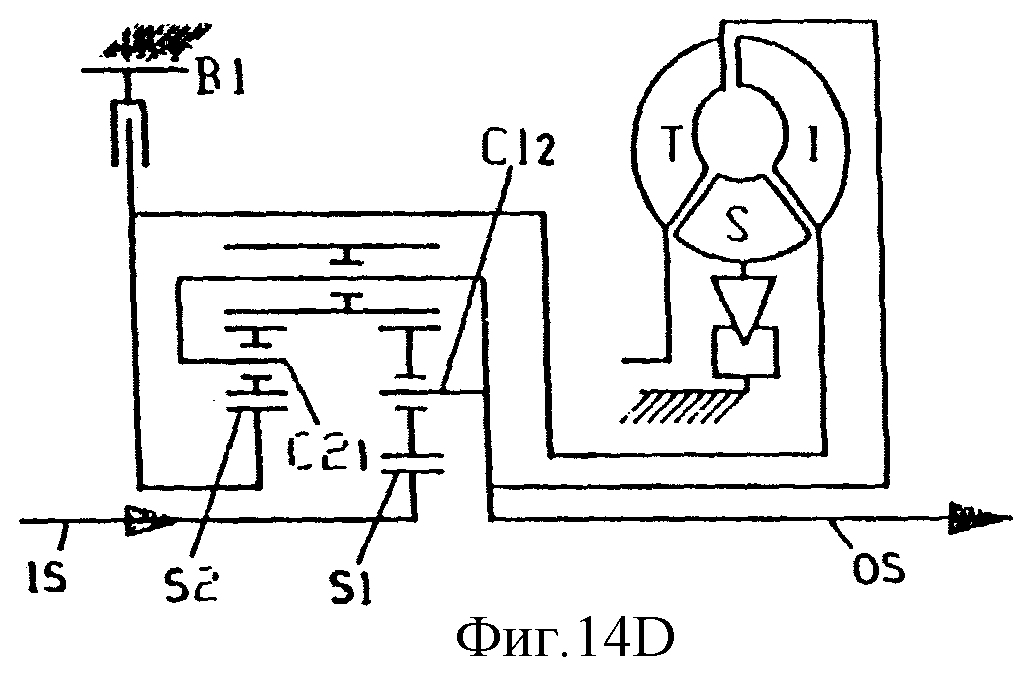
Для справки можно указать, что, если вместо системы обратного вращения (RI ~ RIV) предусмотрена система обратного вращения, которая установлена на линии передачи мощности, присоединенной к насосному колесу (в процессе эксплуатации привод при обратном вращении выполняется при фиксированном передаточном числе), (T) и (I) могут быть размещены на стороне выходного вала, и пример такой конструкции (A)-(T) (I) показан на фиг. 14D. В данном случае пример конструкции, в которой боковое расположение (T) и (I) изменено на обратное, то есть конструкции (A)-(I) (T), показан на фиг. 14E.
В конструкции, в которой входной элемент изменен с точки зрения симметрии входного элемента, в том случае, если предусмотрена система обратного вращения, которая установлена на линии передачи мощности, присоединенной к насосному колесу, (T) и (I) могут быть размещены на стороне выходного вала, и пример такой конструкции (B)-(T) (I) показан на фиг. 14F, и в данном случае пример конструкции, в которой боковое расположение (T) и (I) изменено на обратное, то есть конструкции (B) - (I) (T), показан на фиг. 14C.
Как описано выше, для настоящего изобретения, основываясь на варианте осуществления, показанном в качестве примера, можно указать на то, что не только входной (ведущий) элемент может быть изменен, но при желании также может быть изменено соединение турбинного колеса и насосного колеса, и естественно функционирование конструкции будет изменяться в соответствии с характеристиками каждого варианта осуществления. Несмотря на то, что каждый из подобных возможных примеров не описан особо в данном описании, такие возможные примеры естественным образом оказываются в рамках объема настоящего изобретения, принимая во внимание смысл настоящего изобретения.
Несмотря на то, что передаточное число между первым и вторым сателлитами планетарной передачи и передаточное число между солнечным зубчатым колесом и зубчатым колесом с внутренним зацеплением не описаны в пунктах формулы изобретения, поскольку можно в полном объеме понять варианты осуществления настоящего изобретения, принимая во внимание принцип работы конструкций по настоящему изобретению или при необходимости рассматривая чертежи, то естественно исключение описания передаточного числа не ограничивает объем настоящего изобретения.
Очевидно, что бесступенчатая коробка передач по настоящему изобретению не ограничена представленными вариантами осуществления, но может быть применена во всех устройствах, в которых обеспечивается возможность изменения скорости (приложения) движущей силы и подачи ее на выходной вал во всех транспортных средствах и производственных установках на основе идеи настоящего изобретения, и что в рамках объема настоящего изобретения могут быть выполнены различные модификации и изменения.
Как описано выше, бесступенчатая коробка передач по настоящему изобретению может быстро реагировать на изменение нагрузки и плавно передавать вращательное усилие в состоянии, в котором все зубчатые колеса находятся в зацеплении, и, кроме того, может бесступенчато изменять скорость при прямом вращении и обратном вращении с помощью простой конструкции, кроме того, она позволяет уменьшить затраты на изготовление и обеспечить повышенную долговечность.
Реферат
Изобретение относится к машиностроению, в частности к бесступенчатой коробке передач (вариатору), обеспечивающей изменение скорости подачи мощности. Бесступенчатая коробка передач содержит ведущий вал, выходной вал, гидротрансформатор, составной планетарный механизм и планетарную передачу для избирательного обеспечения привода в обратном направлении. Насосное колесо гидротрансформатора присоединено с возможностью передачи приводного усилия к одному из элементов составного планетарного механизма. Турбинное колесо присоединено с возможностью передачи приводного усилия к другому элементу составного планетарного механизма. Статор гидротрансформатора установлен между насосным колесом и турбинным колесом с помощью муфты свободного хода. Составной планетарный механизм приводится в движение ведущим валом. Конструкция позволяет получить большую движущую силу, предпочтительные эксплуатационные характеристики, плавную и бесшумную работу и бесступенчатое изменение скорости во время работы при реверсе. 12 с. и 4 з.п.ф-лы,1 табл., 21 ил.

Комментарии