Привод - RU2466316C2
Код документа: RU2466316C2
Чертежи

Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к приводу с двумя электродвигателями, приводящими в движение общий ведомый элемент.
Уровень техники
Привод такого рода описан в патенте US 2005/0229729. Электродвигатели связаны с ведомым элементом при помощи дифференциальной планетарной понижающей передачи. В случае выхода из строя одного из электродвигателей ведомый элемент приводится в действие другим электродвигателем. Привод используют для фиксации опоры шасси воздушного судна в убранном положении.
Раскрытие изобретения
Первый аспект изобретения предусматривает привод, содержащий:
высокоскоростной тракт передачи энергии, включающий первый электродвигатель и высокоскоростной редуктор;
высокомоментный тракт передачи энергии, включающий второй электродвигатель и высокомоментный редуктор;
ведомый элемент; и
волновую передачу, которая содержит:
эллиптический волновой генератор;
гибкое колесо, связанное с волновым генератором при помощи подшипника, причем форма гибкого колеса за счет деформации соответствует эллиптической форме волнового генератора; и
жесткое колесо, которое окружает гибкое колесо и выполнено с возможностью вхождения в зацепление с ним;
причем один из компонентов волновой передачи связан с ведомым элементом, а каждый из других компонентов волновой передачи составляет часть соответствующего тракта передачи энергии.
Обычно привод может продолжать работу при различных условиях отказа, включая отказ одного из электродвигателей, помехи в тракте передачи энергии между одним из электродвигателей и ведомым элементом, и заклинивание волновой передачи. По сравнению с планетарными передачами, волновая передача обеспечивает разнообразные преимущества, включая большое передаточное отношение в сочетании с малым весом; небольшие габариты, особенно в осевом направлении; небольшой люфт; малый момент инерции.
Любой из компонентов волновой передачи можно связать с ведомым элементом, но в описанном ниже предпочтительном варианте осуществления с ведомым элементом связано гибкое колесо.
Привод может дополнительно содержать два тормоза, каждый из которых выполнен с возможностью приложения тормозного усилия к одному из компонентов волновой передачи либо путем вхождения в зацепление с этим компонентом, либо путем вхождения в зацепление с тем элементом в тракте передачи энергии, который связан с компонентом волновой передачи. Это позволяет эксплуатировать привод в таком режиме, когда один из электродвигателей передает энергию (или замкнут накоротко для того, чтобы создавать замедляющее усилие), а другой заблокирован тормозом.
Обычно типы первого и второго электродвигателей отличны друг от друга.
Обычно передаточное отношение между ведомым элементом и первым электродвигателем отличается от передаточного отношения между ведомым элементом и вторым электродвигателем. Это позволяет использовать разные электродвигатели, вероятность одновременного отказа которых мала по сравнению с одинаковыми электродвигателями.
Второй аспект изобретения предусматривает такой способ эксплуатации привода по первому аспекту, в котором обеспечивают одновременную работу электродвигателей.
Электродвигатели могут передавать энергию на ведомый элемент в противоположных направлениях и/или в одном направлении. Помимо эксплуатации привода в режиме, когда электродвигатели работают одновременно, привод можно эксплуатировать в одном из следующих режимов:
- дополнительный режим, в котором по меньшей мере один из электродвигателей приводится в действие в обратном направлении посредством соответствующего компонента волновой передачи;
- дополнительный режим, в котором один из электродвигателей замкнут накоротко для создания замедляющего усилия; и/или
- дополнительный режим, в котором по меньшей мере один из компонентов волновой передачи заблокирован.
Воздушное судно может быть оснащено таким приводом для того, чтобы выпускать опору шасси или осуществлять ее поворот, или выпускать аэродинамические поверхности управления, такие как закрылки или элероны.
Дальнейший аспект изобретения предусматривает опору шасси воздушного судна, содержащую одно или более колес и привод согласно первому аспекту изобретения, причем ведомый элемент привода связан с колесом (колесами) таким образом, что движение ведомого элемента обеспечивает поворот колеса (колес).
Краткое описание чертежей
Далее в тексте будет представлено подробное объяснение изобретения со ссылкой на примерный вариант осуществления, проиллюстрированный на чертежах.
Фиг.1 показывает поперечный разрез привода с волновой передачей;
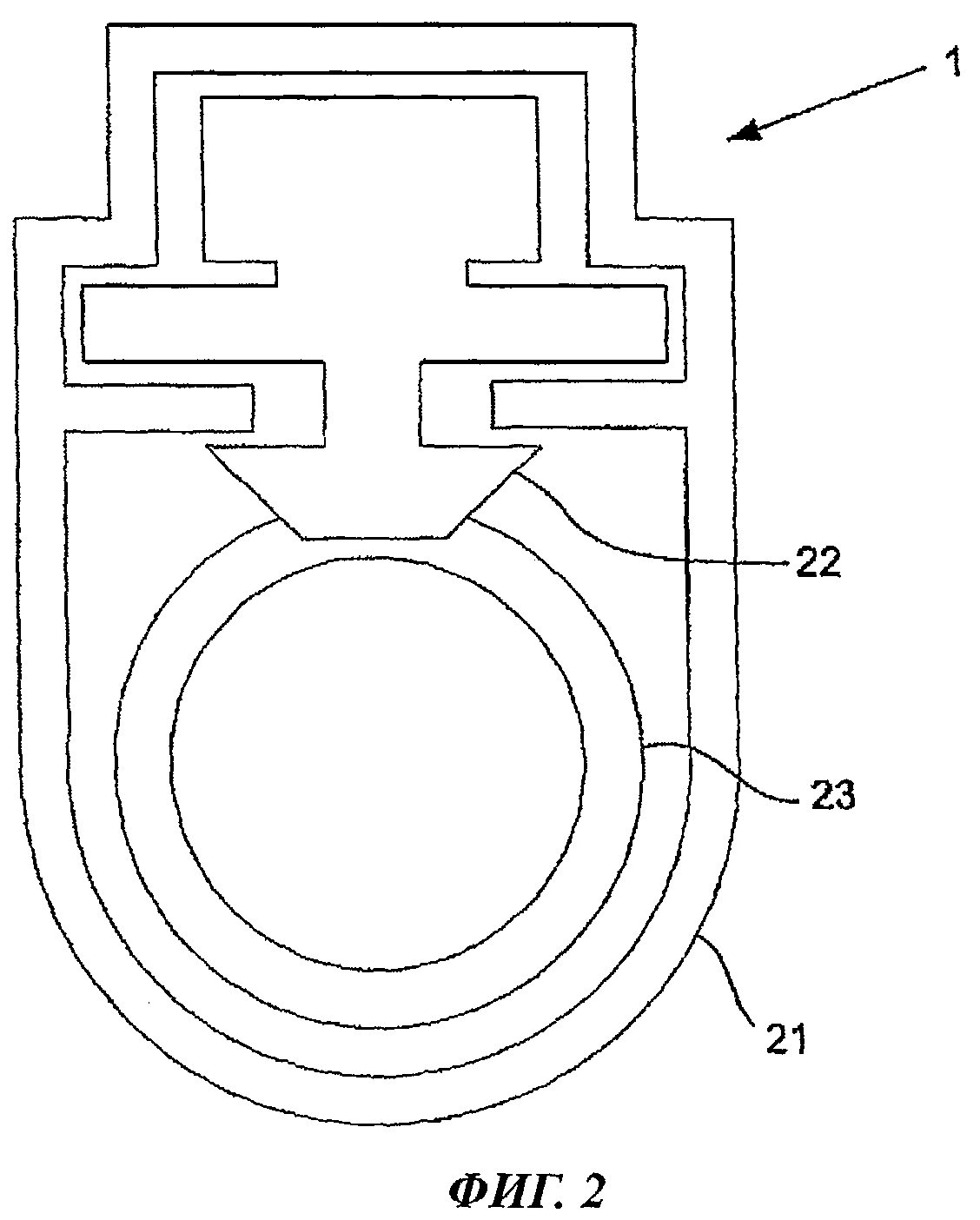
Фиг.2 показывает горизонтальный поперечный разрез рулевого механизма опоры шасси;
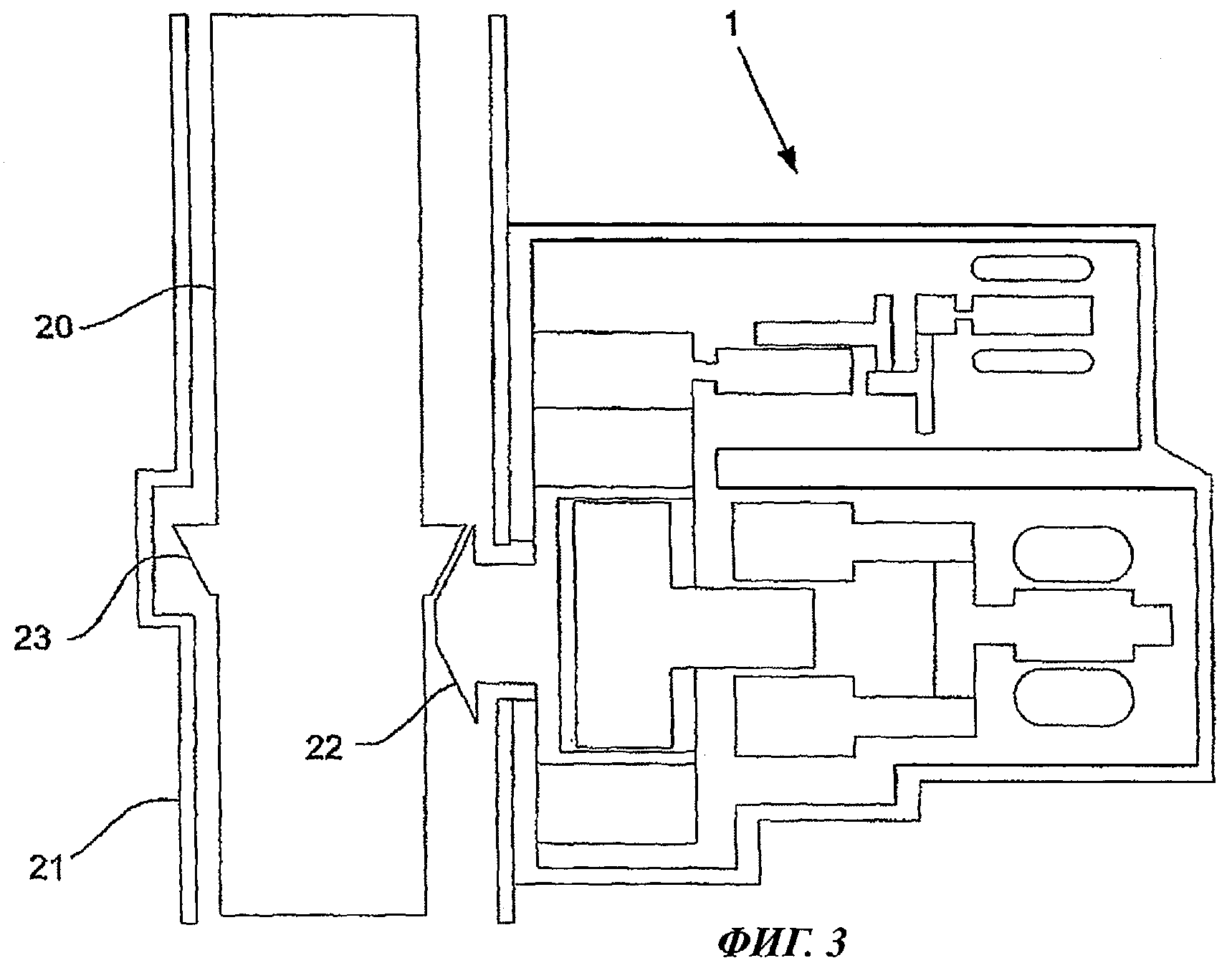
Фиг.3 показывает вертикальный поперечный разрез рулевого механизма опоры шасси;
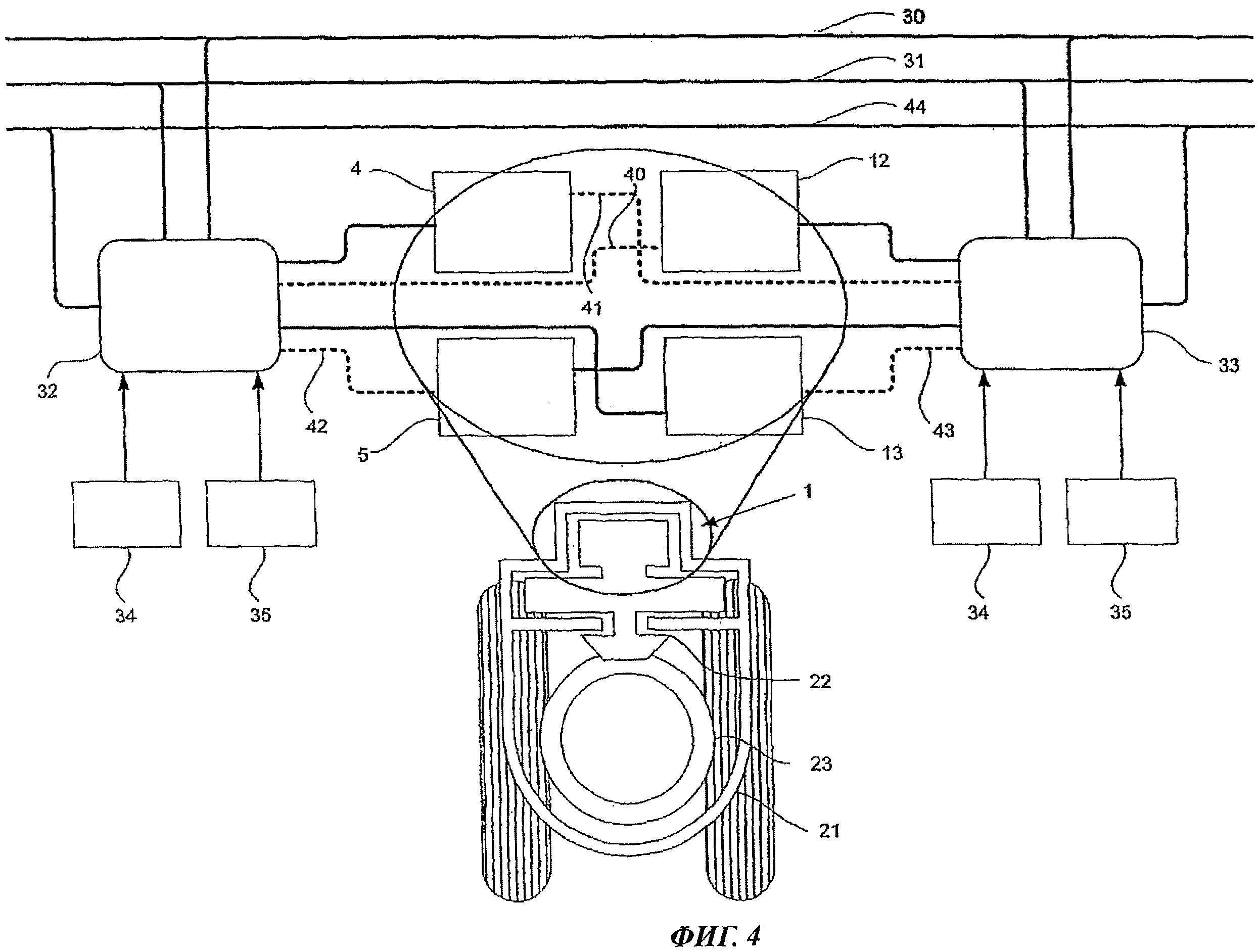
Фиг.4 схематически показывает электронную систему управления для рулевого механизма;
Фиг.5 показывает график максимальных значений крутящего момента для двух трактов передачи энергии, с питанием от шин постоянного тока напряжением 270 В; и
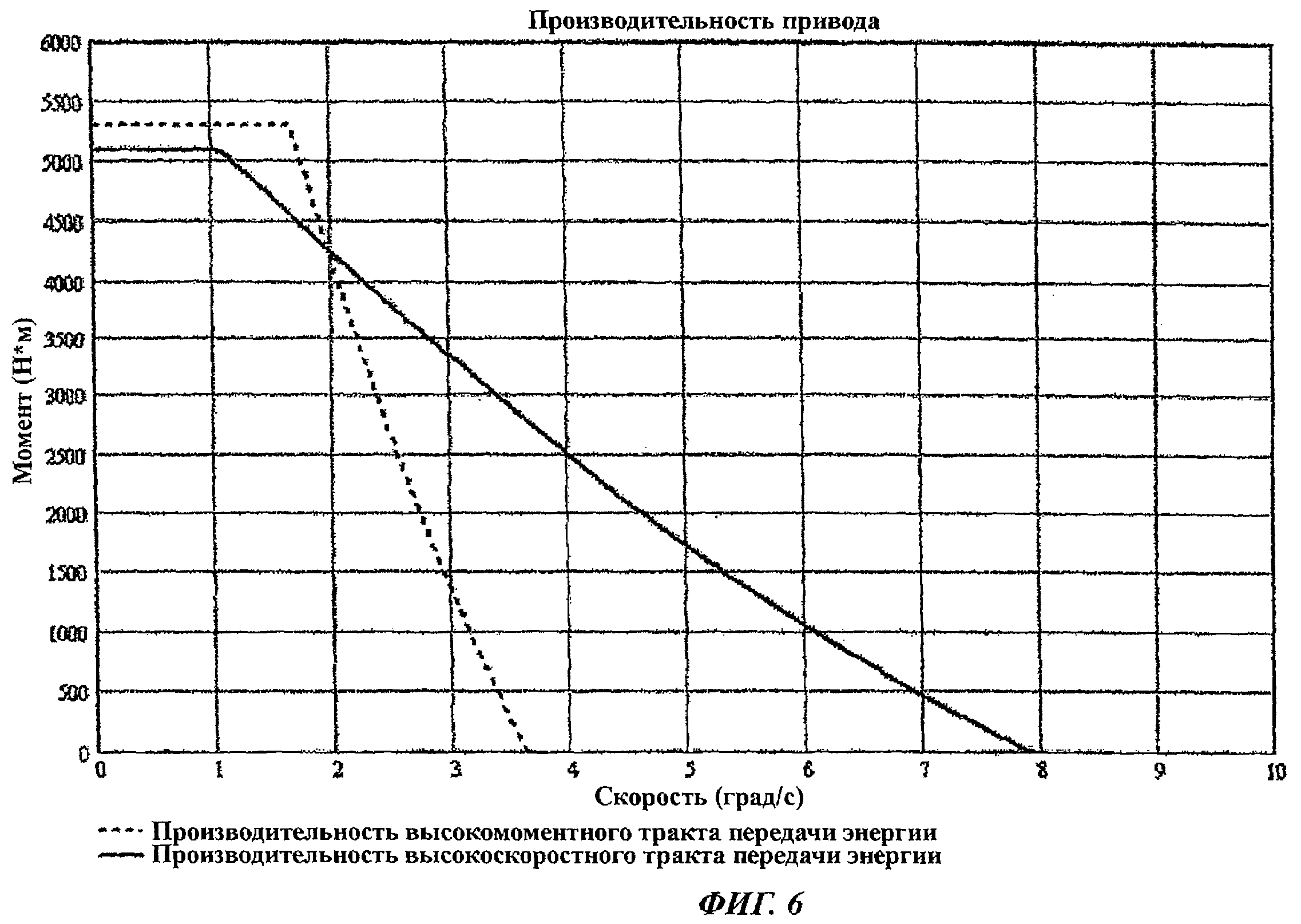
Фиг.6 показывает график максимальных значений крутящего момента для двух трактов передачи энергии, с питанием от аварийной шины постоянного тока напряжением 28 В.
Осуществление изобретения
На фиг.1 показан привод 1. Составной частью привода является корпус 2, кроме того, привод включает в себя высокоскоростной тракт передачи энергии и высокомоментный тракт передачи энергии, каждый из которых связан с общим ведомым элементом. Высокоскоростной тракт передачи энергии включает в себя тормоз 4, электродвигатель 5, высокоскоростной редуктор, состоящий из пяти зубчатых колес 6-10, находящихся в зацеплении друг с другом, и жесткого колеса 11. Высокомоментный тракт передачи энергии включает в себя тормоз 12, электродвигатель 13, высокомоментный редуктор, состоящий из трех зубчатых колес 14-16, и волновой генератор 17.
Высокоскоростной тракт передачи энергии и высокомоментный тракт передачи энергии работают параллельно, и оба связаны с гибким колесом 18, имеющим вал, который выступает из корпуса и служит в качестве ведомого элемента привода. Когда два тракта передачи энергии приводят в действие для передачи одинаковой механической энергии, электродвигатель 5 в высокоскоростном тракте вращается со значительно более высокой скоростью, чем электродвигатель 13 в высокомоментном тракте. Например, передаточное отношение высокоскоростного тракта может составлять 1600:1, а передаточное отношение высокомоментного тракта может составлять 53:1. Другими словами, на один оборот ведомого элемента приходится 1600 оборотов высокоскоростного электродвигателя 5, и 53 оборота высокомоментного электродвигателя 13.
Хотя на фиг.1 это не видно, но волновой генератор 17 имеет эллиптический профиль. Гибкое колесо 18 окружает волновой генератор и связано с ним при помощи переходного подшипника 19. Гибкое колесо 18 выполнено из эластичного материала, что обеспечивает его соответствие эллиптической форме волнового генератора 17. На внешней периферии гибкого колеса 18 имеется некоторое количество зубьев, которые входят в зацепление с зубьями на внутренней периферии жесткого колеса 11. Гибкое колесо 18 имеет на два зуба меньше, чем жесткое колесо. Поэтому при каждом обороте волнового генератора 17 по часовой стрелке, гибкое колесо поворачивается на два зуба против часовой стрелки, тем самым, обеспечивая высокое передаточное отношение R. Величина передаточного отношения R определяется числом зубьев, имеющихся на одной половине жесткого колеса 11, и обычно находится в интервале от 30 до 160.
В обычной волновой передаче жесткое колесо закреплено неподвижно. В противоположность этому, в приводе 1 жесткое колесо 11 является частью высокоскоростного тракта передачи энергии. В представленной ниже Таблице 1 показаны компоненты, которые могут быть выбраны для варианта примерной конструкции привода.
Обращаем внимание на то, что общий вес привода, с учетом данных выше примерных значений, составляет 28 кг.
Привод 1 можно использовать для выполнения различных функций на воздушном судне, а также использовать в применениях, не связанных с воздушными судами. Например, привод можно использовать с поверхностями управления крыла, такими как элероны. В описанном ниже примере со ссылкой на фигуры 2-6, привод 1 используют для передачи момента поворота на шестеренный вал передней опоры шасси.
Как показано на фигурах 2 и 3, шестеренный вал 20 передней опоры шасси смонтирован в стойке 21 с возможностью вращения. Стойка 21 проходит вниз от носовой части воздушного судна (не показано).
Коническая шестерня 22 на ведомом валу, который тянется от гибкого колеса 18, входит в зацепление с конической шестерней 23 на шестеренном валу 20. Таким образом, при вращении гибкого колеса 18, шестеренный вал 20 вращается вокруг своей оси, что позволяет управлять колесами передней опоры шасси. Конические шестерни 22, 23 обеспечивают конечное понижающее передаточное отношение 2:1.
На фиг.4 показан электрический интерфейс системы. Работу электрического интерфейса обеспечивают две высоковольтные шины 30, 31 постоянного тока, на которых теоретически присутствует напряжение 270 В. Два электронных блока 32, 33 управления поворотом подключены к шинам 30, 31 постоянного тока и включают в себя необходимую мостовую схему для приведения в действие электродвигателей 5, 13, представляющих собой трехфазные устройства. Каждый блок 32, 33 управления поворотом получает входной сигнал от штурвалов 34 и педалей 35 управления рулем направления. Кроме того, каждый блок управления поворотом снабжен линиями управления, подключенными к тормозам 4, 12 и электродвигателям 5, 13. При подаче питания управление всеми компонентами осуществляется только по одному каналу, то есть с помощью блока 32 управления поворотом, или с помощью блока 33 управления поворотом. В альтернативном случае, каждый блок 32, 33 управления поворотом отвечает только за один тормоз и один электродвигатель. В этом случае появляется возможность уменьшить вес опоры шасси за счет удаления линий 40, 41 управления тормозами и линий 42, 43 управления электродвигателями.
Функционирование привода 1 описано ниже, в Таблице 2, где направление действующей энергии в двух трактах передачи энергии определяется следующими ключевыми словами:
Разомкнут: Тракт передачи энергии представляет собой разомкнутую цепь и может двигаться в обратном направлении.
Заблокирован: Тракт передачи энергии механически заблокирован.
Заглушен: Электродвигатель в тракте передачи энергии замкнут накоротко по фазам и создает механическое замедляющее усилие, которое противодействует движению со скоростью, которая примерно пропорциональна скорости вращения.
1: Положительное направление приложенного крутящего момента/скорости.
-1: Отрицательное направление приложенного крутящего момента/скорости.
Таким образом, при нормальной эксплуатации привода, его можно перевести в любой из представленных в Таблице 2 режимов работы, путем выборочного включения тормозов и/или переключения электродвигателей между различными состояниями. В случае возникновения помех или потери электропитания привод работает в эквивалентном режиме отказа.
Режим бездействия/бездействия
В этом режиме ведомый элемент привода может двигаться в обратном направлении. Привод переходит в эквивалентный режим отказа в случае выхода из строя обеих шин постоянного тока или в случае перерезания силовых кабелей. В этом режиме система может двигаться в обратном направлении. Этот режим можно использовать на земле при буксировке воздушного судна.
Режим бездействия/торможения (торможения/бездействия)
В этих двух режимах ведомый элемент привода может двигаться в обратном направлении. Привод переходит в эквивалентный режим отказа в случае возникновения механической помехи в канале торможения. В бездействующем свободном тракте имеет место инерционное замедление.
Режим рекуперации/торможения (торможения/рекуперации)
В этих двух режимах свободный электродвигатель замкнут накоротко, и он создает замедляющее усилие, которое является функцией скорости. Каждый электродвигатель может быть снабжен потребителем энергии, таким как мощный резистор (не показан), для того, чтобы поглощать регенерируемую в этих режимах энергию. Любой из этих режимов можно использовать при посадке воздушного судна, для того чтобы обеспечить гашение так называемых «самовозбуждающихся угловых колебаний управляемых колес». Привод переходит в эквивалентный режим отказа в случае возникновения механической помехи в канале торможения. В качестве альтернативного режима для гашения самовозбуждающихся угловых колебаний управляемых колес можно также использовать дополнительный режим рекуперации/рекуперации (не показан в Таблице 2).
Режим высокой скорости
В этом режиме волновую передачу используют в качестве редуктора с передаточным отношением 1:1 - другими словами, жесткое колесо 11 и волновой генератор 17 вращаются вместе. Здесь отсутствует опасность противодействия усилий. Привод переходит в режим эквивалентного отказа в случае возникновения помехи в волновой передаче. В этом режиме отказа система сохраняет свою способность передавать крутящий момент непосредственно от двух входных электродвигателей. Однако в этом режиме отказа ограничена возможность совместного вращения двух редукторов друг с другом, и рассогласование вращения между редукторами может вызвать противодействие, а также стать причиной тепловой и электрической нагрузки.
Режим высокого крутящего момента
В этом режиме знак действующей энергии для двух трактов передачи энергии противоположен и используют дифференциальное передаточное отношение. Здесь эквивалентный режим отказа отсутствует.
Режим торможения высокоскоростного тракта передачи энергии
В этом режиме используют полное дифференциальное передаточное отношение. Редуктор должен работать на пониженной скорости, но при правильном выборе передаточных отношений привод способен сохранять 100%-ный крутящий момент на ведомом валу. Привод переходит в эквивалентный режим отказа в случае возникновения помехи в высокоскоростном тракте передачи энергии.
Режим торможения высокомоментного тракта передачи энергии
В этом режиме используют полное дифференциальное передаточное отношение. Редуктор должен работать на пониженной скорости, но при правильном выборе передаточных отношений привод способен сохранять 100%-ный крутящий момент на ведомом валу. Привод переходит в эквивалентный режим отказа в случае возникновения помехи в высокомоментном тракте передачи энергии.
Режим торможения/торможения
В описанном варианте осуществления для того, чтобы система не могла двигаться в обратном направлении, достаточно использовать тормоза небольшого размера.
Компоненты высокоскоростного тракта передачи энергии (а именно электродвигатель 5, редуктор 6-10 и тормоз 4) должны быть способны выдержать крутящий момент при полной нагрузке, так как они работают параллельно с высокомоментным трактом передачи энергии. Тем самым, при работе с большими нагрузками, предотвращается ситуация, когда компоненты высокомоментного тракта двигаются быстрее компонентов высокоскоростного тракта.
В приводе 1, показанном на фиг.1, в качестве ведомого элемента использовано гибкое колесо 18. Поэтому, когда заблокирован высокоскоростной тракт передачи энергии (включающий в себя жесткое колесо 11), передаточное отношение равно -R. Аналогичным образом, когда заблокирован высокомоментный тракт передачи энергии (включающий в себя волновой генератор 17), передаточное отношение равно R/R+1.
Если привод двигается в обратном направлении (в этом случае гибкое колесо 18 становится ведущим элементом), то при заблокированном жестком колесе 11 передаточное отношение равно -1/R, а при заблокированном волновом генераторе 17 передаточное отношение равно (R+1)/R.
В редукторе альтернативной конструкции (не показан) может быть предусмотрен тормоз для блокировки гибкого колеса 18. Тем самым обеспечиваются две дополнительные возможности:
- когда жесткое колесо 11 используют в качестве ведущего элемента, а волновой генератор 17 - в качестве ведомого элемента, передаточное отношение равно 1/R+1; и
- когда волновой генератор 17 используют в качестве ведущего элемента, а жесткое колесо 11 - в качестве ведомого элемента, передаточное отношение равно R+1.
Размер тормозов 4, 12 выбирают таким, чтобы в случае выхода их из строя соответствующие электродвигатели 5, 13 могли преодолевать их воздействие.
Обращаем внимание на то, что оба редуктора могут двигаться в обратном направлении.
В реверсивном режиме, или режиме отказа привод обычно должен обеспечивать полную производительность по крутящему моменту для данной области применения, но часто допускается уменьшение достигаемого значения.
Производительность привода по нагрузке и скорости для двух трактов нагружения показана на фиг.5 (фиг.5 показывает производительность перед дополнительной конической передачей с передаточным отношением 2:1 на выходе). В зависимости от напряжения питания может возникнуть необходимость в искусственном ограничении скорости электродвигателя, из-за физического ограничения компонентов редуктора и тормоза по допустимой угловой скорости.
Обращаем внимание на то, что волновая передача действует как дифференциальная, и поэтому все нагрузки и скорости, ограничиваемые графиком производительности высокоскоростного тракта, могут быть фактически достигнуты путем объединения входных параметров для двух трактов нагружения.
Шина 44 аварийного электропитания напряжением 28 В может быть предусмотрена для обеспечения работоспособности привода 1 в случае выхода из строя обеих высоковольтных шин 30, 31 постоянного тока. Предполагается, что во время работы шины аварийного электропитания допускается значительное снижение рабочих параметров. На фиг.6 показана производительность тракта нагружения по нагрузке и скорости во время работы при номинальном напряжении 28 В. Система может достичь максимального крутящего момента на скорости до 0,9 град/с, и максимальной скорости 4 град/с без нагрузки. Режимы замедления и свободно ориентирующегося носового колеса по-прежнему могут использоваться в полной мере.
При нормальных условиях управления движением, в соответствии с законом управления, два электродвигателя работают одновременно в некотором режиме между предельными случаями режима высокой скорости и режима высокого крутящего момента. В нормальных условиях закон управления действует в соответствии с определенным критерием оптимальных рабочих характеристик. Например, управление системой можно осуществлять таким образом, чтобы уменьшить до минимума потребление тока электродвигателями или потребление тока питания. С этой целью регулируют мощность на входе каждого электродвигателя.
Тормоза 4, 12 могут быть заменены устройствами с двумя устойчивыми состояниями.
Кроме того, имеется возможность для замедления: торможение высокоскоростного электродвигателя 5 и замыкание накоротко или глушение высокомоментного электродвигателя 13, что ведет к огромному выигрышу в передаточном отношении применительно к высокоскоростному электродвигателю 5. Предварительные оценки дают основание предположить, что может быть достигнута скорость замедления 80 кНмс/рад (предполагая нулевое электромагнитное скольжение). Представляется, что этого более чем достаточно для большинства требований к торможению.
Представлена концепция облегченного электромеханического привода, сохраняющего работоспособность при отказе отдельных элементов. Эта концепция обладает следующими конструктивными преимуществами:
1. Очень высокая удельная мощность (на единицу массы).
2. Полное механическое резервирование и сохранение работоспособности при возникновении помех.
3. Отсутствие режимов неявных отказов.
4. Разнородные тракты передачи энергии (типы электродвигателей и редукторов могут быть отличны друг от друга, но заведомо отличаются по размеру).
5. При нормальных условиях в приводе невозможно противодействие усилий.
6. Очень низкие затраты, обусловленные массой тормоза.
7. Плавное регулирование крутящего момента/скорости в очень широком диапазоне.
8. Снижена вероятность повреждения из-за движения в обратном направлении.
9. Возможность движения в обратном направлении в обычном режиме (для реализации этой функции не нужно никаких дополнительных компонентов).
10. Отсутствие неясности при установлении причины отказа.
11. Резервирование электрической системы, с возможностью применения строенной или учетверенной компоновки.
12. Возможность для переналадки в несущей конструкции воздушного судна.
13. Очень высокая способность к замедлению.
14. Возможность эксплуатации в очень широком диапазоне рабочих напряжений.
Несмотря на то что описание настоящего изобретения было сделано посредством одного или более предпочтительных вариантов осуществления изобретения, оно не ограничивается этим описанием, а предполагает изменение или модифицирование самыми различными способами, без отхода от содержания изобретения, в соответствии с пунктами прилагаемой формулы изобретения.
Реферат
Изобретение относится к приводам с двумя электродвигателями, приводящими в движение общий ведомый элемент. Привод (1) содержит два электродвигателя (5, 13), два тормоза (4, 12), волновую передачу и ведомый элемент. Волновая передача содержит эллиптический волновой генератор (5), гибкое колесо (18), связанное с волновым генератором при помощи подшипника (19) и с ведомым элементом, и жесткое колесо (11), которое окружает гибкое колесо, выполнено с возможностью вхождения с ним в зацепление и связано со вторым электродвигателем (13). Первый тормоз (4) выполнен с возможностью приложения тормозного усилия к волновому генератору, а второй тормоз (12) - к жесткому колесу. Привод используется в воздушном судне, а также для фиксации опоры шасси воздушного судна в убранном положении. Изобретение обеспечивает высокую удельную мощность, полное механическое резервирование и сохранение работоспособности при возникновении помех. 4 н. и 6 з.п. ф-лы, 2 табл., 6 ил.
Комментарии