Система для складирования единиц хранения - RU2713674C1
Код документа: RU2713674C1
Чертежи


Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ, И УРОВЕНЬ ТЕХНИКИ
Изобретение относится к системе для складирования единиц хранения или аналогичных средств в виде последовательных рядов, расположенных на основании, содержащая, по меньшей мере, один поперечный транспортер для переноса единиц хранения, причем упомянутый поперечный транспортер расположен параллельно упомянутым рядям в горизонтальном направлении и непосредственно над упомянутым основанием, при этом поперечный транспортер выполнен с возможностью перемещения в направлении, по существу, параллельном плоскости основания и перпендикулярном его продольному направлению, манипуляционный механизм, которым оснащен упомянутый поперечный транспортер и который выполнен с возможностью перемещения в продольном направлении поперечного транспортера и имеет средства для захвата единиц хранения с целью перемещения единиц хранения и переноса единиц хранения в ряд с транспортера или наоборот, для разгрузки их из ряда, и, по меньшей мере, один продольный транспортер, который предусмотрен на одном конце и на том же уровне, что и поперечный транспортер, и который соединен с упомянутым концом поперечного транспортера для перемещения единиц хранения между поперечным транспортером и продольным транспортером, и блок управления, предназначенный для управления поперечным транспортером, упомянутым, по меньшей мере, одним продольным транспортером и манипуляционным механизмом.
В документе FI 96107B предложено решение, касающееся одноуровневого хранилища, которое доказало свою практичности и полезность при изменяющихся потребностях в хранилищах.
Вместе с тем, по-прежнему сохраняется непреходящая потребность в более адаптируемых и универсальных системах для складирования единиц хранения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Рассматривая первый аспект, отмечаем, что может быть предложена система для складирования единиц хранения или аналогичных средств в виде последовательных рядов, расположенных на основании, содержащая, по меньшей мере, один поперечный транспортер для переноса единиц хранения, причем упомянутый поперечный транспортер расположен параллельно упомянутым рядам в горизонтальном направлении и непосредственно над упомянутым основанием, при этом поперечный транспортер выполнен с возможностью перемещения в направлении, по существу, параллельном плоскости основания и перпендикулярном его продольному направлению, манипуляционный механизм, которым оснащен упомянутый поперечный транспортер и который выполнен с возможностью перемещения в продольном направлении поперечного транспортера и имеет средства для захвата единицы хранения с целью перемещения единицы хранения, и для переноса единиц хранения в ряд с транспортера, или наоборот, для выгрузки их из ряда, и, по меньшей мере, один продольный транспортер, который предусмотрен на одном конце и на том же уровне, что и поперечный транспортер, и который соединен с упомянутым концом поперечного транспортера с целью перемещения единиц хранения между поперечным транспортером и продольным транспортером, и блок управления, предназначенный для управления поперечным транспортером, упомянутым, по меньшей мере, одним продольным транспортером и манипуляционным механизмом. При этом блок управления дополнительно содержит блок информирования о единице хранения, оснащенный средством информирования о единице хранения с целью связи упомянутой единицы хранения с информацией о единице хранения, характерной для упомянутой единицы хранения, и базу данных с целью хранения упомянутой информации о единице хранения для дальнейшего использования.
Тем самым можно достичь адаптируемой и универсальной системы.
Эта система отличается тем, что изложено в отличительной части независимого пункта формулы изобретения. Несколько других вариантов осуществления отличаются тем, что изложено в других пунктах формулы изобретения. Предлагаемые варианты осуществления также раскрыты в описании и на чертежах данной заявки на патент. Содержание изобретательского замысла этой заявки на патент можно также охарактеризовать не так, как это сделано в нижеследующей формуле изобретения. Содержание изобретательского замысла можно также оформить в нескольких отдельных изобретениях, особенно в случаях, если изобретение проходит экспертизу в свете явно или неявно выраженных подзадач или ввиду получаемых выгод либо групп выгод. Некоторые из определений, содержащихся в нижеследующей формуле изобретения, могут оказаться затем ненужными ввиду отдельных изобретательских замыслов. В рамках объема притязаний согласно основному изобретательскому замыслу, признаки разных вариантов осуществления изобретения применимы к другим вариантам осуществления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Несколько вариантов осуществления, иллюстрирующих данное изобретение, описаны подробнее в связи с прилагаемыми чертежами, при этом:
на фиг.1 представлен схематический вид сверху системы складирования;
на фиг.2 представлено схематическое перспективное изображение системы складирования, показанной на фиг.1; и
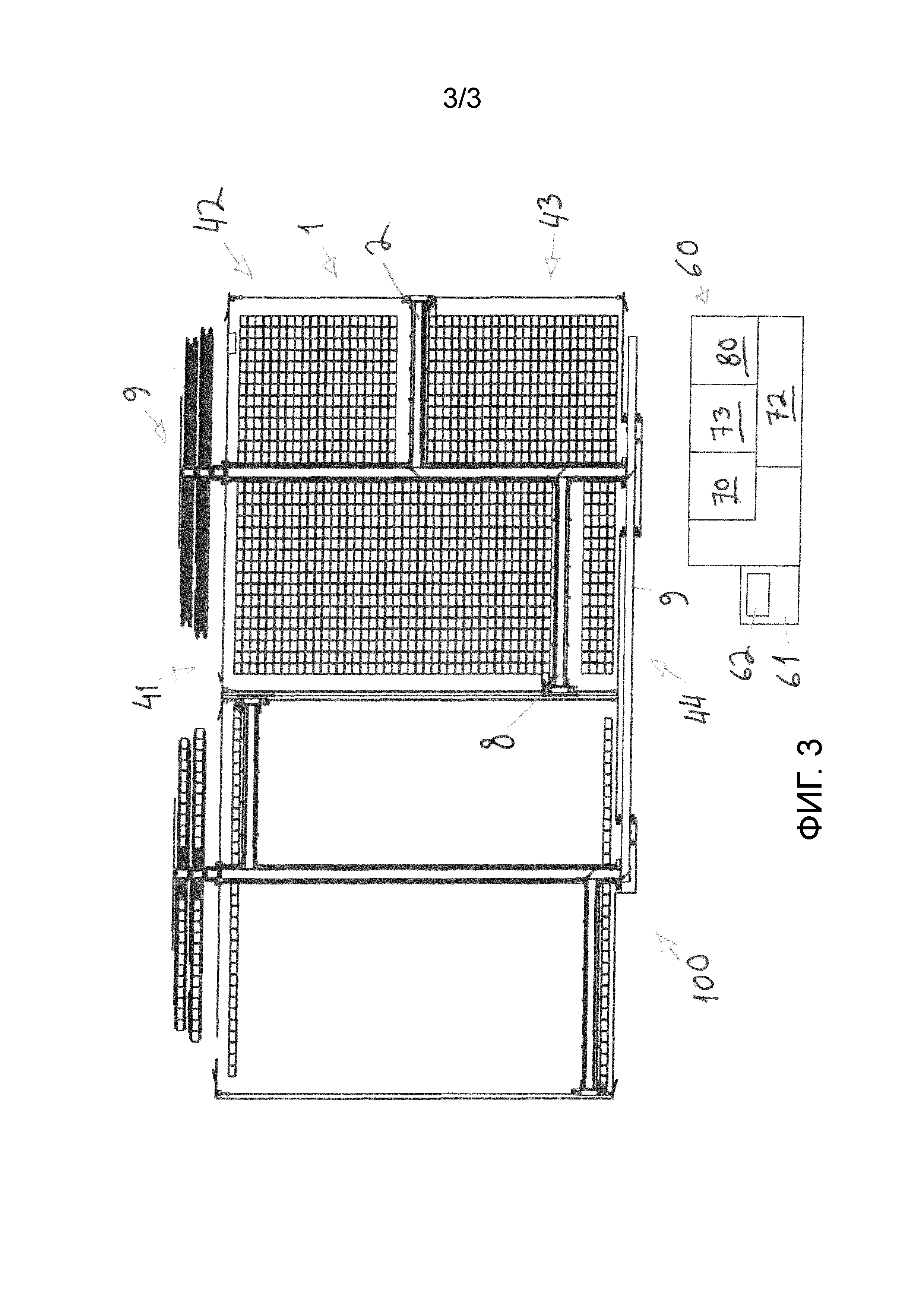
на фиг.3 представлен схематический вид сверху еще одной системы складирования.
На чертежах несколько вариантов осуществления показаны упрощенными из соображений ясности изложения. Аналогичные части обозначены одинаковыми позициями на чертежах.
ПОДРОБНОЕ ОПИСАНИЕ
На фиг.1 представлен схематический вид сверху системы складирования, а на фиг.2 представлено схематическое перспективное изображение системы складирования, показанной на фиг.1.
Система 100 хранения содержит так называемое одноуровневое хранилище, которое содержит сплошное горизонтальное основание или средство поддержки, обозначенное позицией 1, такое, как пол складского помещения. Термин «горизонтальное» в данном случае означает не только абсолютно горизонтальную плоскость, но и плоскости, которые несколько наклонены, например, для направления воды в заранее определенном направлении. Структура основания может быть сплошной, рельсовой, решетчатой, сетчатой, и т.д.
Хранилище используется для складирования единиц 50 хранения или аналогичных средств в виде последовательных рядов 3, расположенных на основании 1.
Единица 50 хранения может быть ящиком, контейнером, упаковочной клетью, коробкой, бочкой и т.д.
В соответствии с одним аспектом, единица 50 хранения представляет собой штабель из двух или более субъединиц хранения, в котором субъединица хранения может быть ящиком, контейнером, упаковочной клетью, коробкой, бочкой и т.д.
Система 100 хранения содержит, по меньшей мере, один поперечный транспортер. Вариант осуществления, показанный на фиг.1, содержит один поперечный транспортер 2 для переноса единиц 50 хранения в ряд 3 или выгрузки из рядов 3. Поперечный транспортер расположен параллельно рядам 3 в горизонтальном направлении и непосредственно над основанием 1. Поперечный транспортер 2 выполнен с возможностью перемещения в направлении 4, по существу, параллельном плоскости основания 1 и перпендикулярном продольному направлению поперечного транспортера. Таким образом, поперечный транспортер 2 всегда может допускать некоторое определенное положение относительно пространства рядов 3 единиц 50 хранения, которыми надлежит манипулировать на следующей стадии.
В одном варианте осуществления продольный транспортер 6 представляет собой транспортер, имеющий фиксированную длину, такой, как роликовый транспортер или ленточный транспортер. В другом варианте осуществления продольный транспортер 6 представляет собой транспортер, длина которого - величина переменная, такой, как телескопический транспортер. В еще одном варианте осуществления продольный транспортер 6 представляет собой передаточную тележку или робокар.
Поперечный транспортер 2 оснащен манипуляционным механизмом 5, который может двигаться в продольном направлении поперечного транспортера.
Манипуляционный механизм 5 оснащен средствами для захвата единицы 50 хранения и переноса ее с поперечного транспортера 2 в один из рядов 3, или наоборот, переноса единицы 50 хранения на поперечный транспортер 2.
В случае, если единица 50 хранения содержит штабель субъединиц хранения, манипуляционный механизм 5 выполнен с возможностью переноса всего штабеля в один из рядов 3 или всего штабеля на поперечный транспортер 2.
В одном варианте осуществления система 100 хранения содержит, по меньшей мере, один продольный транспортер 6, который предусмотрен на одном конце и на том же уровне, что и поперечный транспортер 2.
Продольный транспортер 6 соединен с упомянутым концом поперечного транспортера 2 для перемещения единиц 50 хранения между поперечным транспортером 2 и продольным транспортером 6.
Операциями системы 100 управляет блок 60 управления, который управляет, например, поперечным транспортером 2, продольным транспортером 6, 7 и манипуляционным механизмом 5.
Блок 60 управления может быть воплощен, например, посредством программируемого логического контроллера (ПЛК), персонального компьютера (ПК), искусственного интеллекта, микроконтроллера, релейного устройства, числового программного управления (ЧПУ), мобильного устройства, и т.д., или может быть воплощен как комбинация одного или нескольких этих вариантов.
Блок 60 управления содержит блок 70 информирования о единице хранения, оснащенный средством 71 информирования о единице хранения, которое выполнено с возможностью осуществления связи единицы 50 хранения с информацией 51 о единице хранения, характерной для единицы 50 хранения.
Блок 70 информирования о единице хранения может содержать компьютерный программный продукт, загружаемый в память блока 60 управления. Компьютерный программный продукт содержит код программы, который при исполнении процессором блока 60 управления воплощает упомянутую связь информации 51 о единице хранения с единицей 50 хранения.
Помимо этого, блок 60 управления содержит базу 72 данных для хранения упомянутой информации 51 о единице хранения с целью дальнейшего использования. В одном варианте осуществления база 72 данных расположена в пределах физической сущности блока 60 управления.
В другом варианте осуществления база 72 данных расположена на сетевом сервере, который соединен с блоком 60 управления посредством провода или беспроводной связи, например - посредством Internet- или Intranet-соединения.
В еще одном варианте осуществления база 72 данных расположена в отдельном внешнем запоминающем средстве, таком, как USB флэш-накопитель, SD-карта или постоянное запоминающее устройство на компакт-диске (CD-ROM), соединяемое с блоком 60 управления.
Блок 60 управления также содержит пользовательский интерфейс 61, посредством которого оператор, пользующийся системой 100, может управлять ее функциями. В одном варианте осуществления пользовательский интерфейс 61 содержит дисплей 62, посредством которого можно визуализировать информацию 51 о единице хранения. В одном варианте осуществления информацию 51 о единице хранения показывают с помощью цветовых кодов. Вместе с тем, информацию 51 о единице хранения также можно показывать с помощью графических кодов или символов, графов, числовых значений или любых визуализируемых символов или их комбинаций.
Можно также показывать некоторую дополнительную информацию и - по выбору - хранить ее в базе 72 данных в дополнение к информации 51 о единице хранения. Эта дополнительная информация может содержать, например, иноформацию о месте хранения, подробнее обсуждаемую ниже в этом описании.
В одном варианте осуществления информация 51 о единице хранения содержит информацию о местонахождении единицы 50 хранения в системе 100.
Преимущество заключается в том, что ситуацией системы 100 можно надлежащим образом управлять, а события хранилища можно прогнозировать.
Местонахождение можно обнаруживать, по меньшей мере, на одном из транспортеров 2, 6, или, по меньшей мере, на некотором его заранее определенном участке, в манипуляционным механизме 5 и/или на основании 1. В одном варианте осуществления местонахождение обнаруживают на определенных участках или местах системы 100, таких, как на переднем конце транспортера. В другом варианте осуществления местонахождения непрерывно обнаруживают на всем пути транспортировки единицы 50 хранения через систему 100.
Местонахождение единицы 50 хранения может быть определено, например, с помощью оборудования машинного зрения, фотоэлемента (фотоэлементов), ультразвукового датчика (ультразвуковых датчиков), концевого выключателя (концевых выключателей), лазера (лазеров), емкостного или индуктивного датчика (емкостных или индуктивных датчиков), радара (радаров) и т.д., или их комбинации. Местонахождение может быть обнаружено непосредственно исходя из единицы 50 хранения. В одном варианте осуществления местонахождение обнаруживают косвенным путем, например, на основе системы измерения положения на транспортере 2, 6, транспортирующем единицу 50 хранения. Система измерения положения на транспортере может содержать импульсный кодер (импульсные кодеры), кодовый датчик абсолютного положения (кодовые датчики абсолютного положения), лазерный кодер (лазерные кодеры), информацию о положении, вычисляемую исходя из скорости транспортера, или комбинацию одного или нескольких из этих вариантов.
В одном варианте осуществления информация 51 о единице хранения содержит информацию о местонахождении единицы 50 хранения, оттранспортированной в ряд 3. Иными словами, речь может идти о месте единицы 50 хранения, расположенной на основании 1.
Преимущество заключается в том, что эта информация делает возможным еще лучшее управление на всем протяжении хранилища и воплощение дополнительных функций и видов активности выполняемые системой 100. Еще одно преимущество заключается в том, что оказывается возможным хранение единиц 50 хранения с оставлением некоторого расстояния между ними. Это особенно выгодно при хранении изделий, нуждающихся в циркуляции воздуха вокруг них. Можно также оставлять довольно широкие не нагруженные полосы основания 1 между единицами 50 хранения и таким образом создавать промежутки, которые способны воспрепятствовать распространение пожара (если он имеет место) в хранилище.
Блок 60 управления может также содержать систему 30 противодействия столкновениям, которая выполнена с возможностью сравнения местонахождения манипуляционного механизма 5 и местонахождения единиц 50 хранения, а также с возможностью ограничения движения манипуляционного механизма 5 в случае риска столкновения.
Преимущество заключается в том, что можно предотвратить или, по меньшей мере, минимизировать прерывания функций хранилища и потребность в работах по уборке, обуславливаемых столкновениями.
Другое преимущество заключается в том, что можно повысить скорость манипуляционного механизма 5, когда нет риска столкновения.
В одном варианте осуществления информация 51 о единице хранения содержит информацию о моменте загрузки единицы 50 хранения, прибывающей в систему 100, на поперечный транспортер 2 и/или продольный транспортер 6.
Преимущество заключается в том, что промежуток времени, в течение которого единица 50 хранения хранилась в хранилище, может быть известным, обеспечивая, например, использование хранилища, тесно связанное с воплощением принципа «первым вошел - первым вышел» (FIFO) в системе 100. Таким образом можно избежать практики воплощения принципа «последним вошел - первым вышел» (LIFO), характерного в известных одноуровневых хранилищах. На практике, это может означать, что манипуляционный механизм 5 направляется на разгрузку конца хранилища или субхранилища, содержащего единицы 50 хранения, характеризуемую наибольшим промежутком времени. В отличие от этого, блоки 50 памяти, прибывающие в хранилище 40, загружаются в ячейках 4 хранения на другом конце хранилища или в другом субхранилище. В одном варианте осуществления блок 60 управления выполнен с возможностью наблюдения за соотношением поступающих единиц 50 хранения и единиц 50 хранения, подлежащих выгрузке. Если это соотношение изменяется более, чем на некоторое заранее фиксированное предельное значение, то изменяют положение поперечного транспортера 2 на другом конце хранилища или в другом субхранилище.
Выгрузка дольше всего присутствующих единиц 50 хранения может также дать преимущество, заключающееся в том, что все области основания 1 будут освобождаться от единиц 50 хранения время от времени. Таким образом, во всех областях основания 1 соответственно возможна уборка, например, мойка. Это важное преимущество, например, когда нужно хранить продукты питания.
В одном варианте осуществления, блок 60 управления содержит блок 73 архивных данных. Упомянутый блок 73 архивных данных содержит архивные данные об информации о единицах хранения, охватывающие период времени, который начался раньше и является более длительным, чем соответствующий информации о единицах хранения, касающейся единиц 50 хранения, присутствующих в хранилище. В одном варианте осуществления, архивные данные содержат информацию об активности системы 100 на почасовой основе. В другом варианте осуществления архивные данные содержат информацию об активности системы 100 не ежедневной основе. В еще одном варианте осуществления архивные данные содержат информацию об активности системы 100 на основе времен года или вне времен года, касающуюся складируемых товаров.
В одном варианте осуществления блок 60 управления использует архивные данные, когда управляет системой 100. Например, если архивные данные демонстрируют высокую активность в определенной части хранилища по утрам в каждый четверг, блок управления может обеспечивать движение поперечного транспортера 2 в упомянутой части хранилища уже в среду вечером. В архивных данных также может уделяться особое внимание периодам времени, когда в хранилище поступает гораздо больше единиц хранения, чем выгружается из хранилища. Тогда блок 60 управления может обеспечивать заблаговременное движение поперечного транспортера 2 в тот конец хранилища, где находящиеся в нем единицы 50 хранения содержатся дольше всего.
Таким образом, система 100 способна предвидеть потребность в видах активности и ускорять операции, имеющие место в хранилище.
В одном варианте осуществления содержимое единицы 50 хранения или изделия (изделий), заключенного (заключенных) в единице 50 хранения, включается в информацию 51 о единице хранения. Эта информация может состоять из информации об отдельных единицах хранения, скомпонованных в штабель, составляющий единицу 50 хранения, или может содержать такую информацию. Например, система 100 может содержать устройство считывания некоторой метки радиочастотной идентификации (РЧИД (RFID)), штрих-кода, кода быстрого реагирования (QR кода), и т.д., выполненное с возможностью считывания соответствующих меток в единицах 50 хранения. Информация об отдельной единице хранения может содержать, например, тип единицы хранения и/или информацию об изделии (изделиях), расположенном (расположенных) в единице хранения.
В одном варианте осуществления информация 51 о единице хранения содержит информацию о доставке или поставщике единицы 50 хранения. Преимущество заключается в том, что количество единиц хранения, поставляемых от некоторого определенного поставщика, становится известным.
В одном варианте осуществления информация 51 о единице хранения содержит информацию об ориентации единицы 50 хранения. В некоторых системах 100 ориентацию единицы 50 хранения можно изменять. Информация об ориентации оказывается особенно выгодной, если форма или конструкция единицы хранения на первом конце системы отличается от имеющейся на втором ее конце. Информацию об ориентации можно использовать при управлении движениями манипуляционного механизма 5 во время приложения захвата к единице 50 хранения.
В соответствии одним аспектом, блок 60 управления дополнительно содержит блок 80 информирования о месте хранения, оснащенный средством 81 информирования о месте хранения. Область основания 1 или некоторые его части разделена или разделены на множество мест 4 хранения, расположенных в рядах 3.
Блок 80 информирования о месте хранения выполнен с возможностью связывания мест 4 хранения с информацией 82 о месте хранения, характерной для упомянутого места хранения. Информацию 82 о месте хранения можно хранить в базе 72 данных для дальнейшего использования и демонстрировать посредством пользовательского интерфейса 61.
Преимущество блока 80 информированиия о месте хранения заключается в том, что посредством упомянутой информации место хранения можно индивидуализировать.
В одном варианте осуществления информация 82 о месте хранения содержит информацию о допустимости использования места 4 хранения. Преимущество заключается в том, что оказывается возможным распознавание места 4 хранения, некорректного или недоступного по какой-либо причине. Таким образом, манипуляционный механизм 5 можно направлять так, что он минует упомянутое место 4 хранения и оттранспортирует единицу хранения в следующее допустимое место 4 хранения.
В одном варианте осуществления система 100 дополнительно содержит измерительное оборудование 10 для измерения параметров поверхности, предназначенный для измерения рельефа места 4 хранения. Информация о рельефе может быть частью информации 82 о месте хранения. В одном варианте осуществления информацию о рельефе используют для того, чтобы установить коэффициент регулировки по высоте для места 4 хранения. Потом можно сохранить коэффициент регулировки по высоте в базе 72 данных. Блок управления учитывает коэффициент регулировки по высоте при определении правильного положения манипуляционного механизма 5 по высоте на месте хранения. Поэтому манипуляционный механизм способен правильно захватывать единицу 50 хранения.
В одном варианте осуществления существуют, по меньшей мере, два коэффициента регулировки по высоте для места 4 хранения. Причина этого заключается в том, что манипуляционный механизм проводить загрузку на место хранения или выгрузку из него, по меньшей мере, с двух его сторон, а положение по высоте может изменяться соответственно. Преимущество заключается в том, что коэффициент положения по высоте оказывается точнее, а загрузку и выгрузку на месте хранения можно сделать безопасной независимо от стороны, с которой загрузку или выгрузку производят.
Измерительное оборудование 10 для измерения параметров поверхности может быть расположен, например, в манипуляционным механизме 5. Измерительное оборудование 10 может содержать, например, лазерные измерительные средства, концевой выключатель (концевые выключатели) измерительного зонда, ультразвуковые средства, и т.д.
В одном варианте осуществления система 100 дополнительно содержит измерительное оборудование 20 для измерения параметров основания, предназначенный для измерения профиля основания 1. В некоторых случаях хранилище приходится приподнимать на основании, которое не представляет собой совершенно горизонтальную плоскость. Измерительное оборудование 20 для измерения параметров основания способен автоматически замерять положение по вертикали в определенных точках основания 1 и сохранять информацию о профиле в базе 72 данных. Блок управления может учитывать профиль основания при определении правильного положения манипуляционного механизма 5 по высоте в место хранения. Поэтому манипуляционный механизм способен правильно захватывать единицу 50 хранения.
Следует отметить, что передача автоматических функций, упоминаемых в этом описании, возможна посредством вводов, осуществляемых оператором системы 100, принадлежащей транспортной компании, заботящейся о переносе единиц хранения в хранилище и из него, и/или сигналов, вводимых в систему из некоторой внешней системы, такой, как система управления, обладающая более высоким приоритетом, чем блок 60 управления.
Движение единиц 50 хранения в системе 100, показанной на фиг.1, можно осуществлять следующим образом.
Продольный транспортер 6 адаптирован для подачи единиц 50 хранения, поступающих с правой стороны согласно фиг.1, на транспортер 2 хранилища, связанный с хранилищем 40, для расположения единиц 50 хранения в хранилище 40. Направление продвижения на продольном транспортере 6 показано стрелкой R. Вместе с тем, следует отметить, что направление продвижения может быть противоположным тому, которое показано стрелкой R. Направление R продвижения можно также изменять при необходимости.
Таким образом, в одном варианте осуществления, когда единицы хранения покидают систему, новые единицы хранения, поступающие в хранилище, могут попадать в систему 100 с противоположного конца на продольном транспортере 6. В этом варианте осуществления положение направляющего элемента 83, позволяющее направлять движение единиц хранения, заменяется на обеспечивающее направление поступающих единиц хранения на поперечном транспортере 2 и покидание системы единицами хранения на продольном транспортере 6 в направлении R.
В другом варианте осуществления единицы хранения, поступающие в хранилище, могут попадать в систему 100 с того же конца на продольном транспортере 6, когда единицы хранения покидают систему.
В еще одном варианте осуществления единицы хранения, поступающие в хранилище, могут попадать в систему 100 с либо с того же конца, либо с противоположного конца, на продольном транспортере 6, когда единицы хранения покидают систему.
Продольный транспортер 6 также выполнен с возможностью приема единиц 50 хранения, выгружаемых из хранилища 40, и подачи их на левую сторону согласно фиг.1.
Манипуляционный механизм 5 заботится о загрузке единиц 50 хранения на основание 1 в находящихся на нем местах 4 хранения или о выгрузке упомянутых единиц хранения с основания 1 на транспортер 2 хранилища.
Операциями и функциями системы 100 управляет блок 60 управления.
На фиг.3 представлен схематический вид сверху еще одной системы складирования. В соответствии одним аспектом система 100 выполнена с возможностью переноса единиц 50 хранения (по меньшей мере) в двух субхранилищах. В варианте осуществления, показанном на фиг.3, имеются четыре субхранилища 41, 42, 43 и 44 на правой стороне согласно фиг.3. Левая сторона согласно фиг.3 может содержать хранилище 100, идентичное находящимся на правой стороне.
В одном варианте осуществления все субхранилища 41-44 используются для складирования аналогичных единиц 50 хранения. В другом варианте осуществления каждое из субхранилищ 41-44 используется для складирования единиц 50 хранения, которые отличаются от единиц 50 хранения в других субхранилищах 41-44. В еще одном варианте осуществления первая пара субхранилищ 41 и 42 используется для складирования первых единиц 50 хранения, тогда как вторая пара хранилищ 43 и 44 используется для складирования вторых единиц 50 хранения, которые отличаются от первых единиц 50 хранения.
Система 100 может содержать один или несколько поперечных транспортеров, а также один или несколько продольных транспортеров.
В варианте осуществления, показанном на фиг.2, имеются два поперечных транспортера 2, 8 и один продольный транспортер 6. Помимо этого, продольный транспортер соединен с двумя дополнительными транспортерами 9, первый из которых адаптирован для подачи по продольному транспортеру 6 единиц 50 хранения, а второй из них адаптирован к приему единиц 50 хранения с продольного транспортера 6.
Информацию 51 о единице хранения, хранимую и используемую блоком 60 управления, можно использовать в усложненных компоновках хранилищ, одна из которых показана на фиг.2. Например, весьма полезным в усложненных компоновках хранилищ может оказаться уже упоминавшийся признак, в соответствии с которым информацию о моменте загрузки на поперечный транспортер и/или продольный транспортер обнаруживают и сохраняют, чтобы обеспечить операции, тесно связанные с воплощением принципа «первым вошел - первым вышел» (FIFO).
В одном варианте осуществления для блока 60 управления предусмотрен временной предел максимального периода хранения для единиц 50 хранения. Если случается так, что упомянутый временной предел превышается в одном из субхранилищ 41-44, блок управления будет направлять поперечный транспортер 2, 8 и манипуляционный механизм 5 на нем, обеспечивая выгрузку из упомянутого одного из субхранилищ 41-44. Преимущество заключается в том, что можно уменьшить нерациональное использование складируемых товаров.
Изобретение не ограничивается только вышеописанными вариантами осуществления, а вместо этого возможны многочисленные изменения в рамках объема изобретательского замысла, охарактеризованного в нижеследующей формуле изобретения. В рамках объема изобретательского замысла, атрибуты и приложения разных вариантов осуществления можно использовать совместно с атрибутами и приложением другого варианта осуществления или взамен их. В рамках объема изобретательского замысла, охарактеризованного в нижеследующей формуле изобретения, подробности изобретения можно изменять.
Позиции чертежей
1 Основаниее
2, 8 Поперечный транспортер
3 Ряд
4 Место хранения
5 Манипуляционный механизм
6, 7 Продольный транспортер
8, 9 Дополнительный транспортер
10 Измерительное оборудование для измерения параметров поверхности
20 Измерительное оборудование для измерения параметров основания
30 Система противодействия столкновениям
40 Хранилище
41-44 Субхранилище
50 Единица хранения
51 Информация о единице хранения
60 Блок управления
61 Пользовательский интерфейс
62 Лисплей
70 Блок информирования о единице хранения
71 Средство информирования о единице хранения
72 База данных
73 Блок архивных данных
80 Блок информирования о месте хранения
81 Средство информирования о месте хранения
82 Информация о месте хранения
83 Направляющий элемент
100 Система
R Направление продвижения.
Реферат
Система для складирования единиц хранения в виде последовательных рядов (3), расположенных на основании (1), содержит поперечный транспортер (2, 8) для переноса единиц хранения, который расположен параллельно рядам (3) в горизонтальном направлении и непосредственно над основанием (1) и выполнен с возможностью перемещения в направлении, (4) параллельном плоскости основания (1) и перпендикулярном его продольному направлению; манипуляционный механизм (5), который выполнен с возможностью перемещения в продольном направлении поперечного транспортера (2, 8) и имеет средства для захвата единицы хранения и для переноса единиц хранения в ряд (3) с транспортера (2, 8), или наоборот, для выгрузки их из ряда (3); продольный транспортер (6, 7), который соединен с концом поперечного транспортера (2, 8) с целью перемещения единиц (50) хранения между поперечным транспортером и продольным транспортером (6, 7); и блок (60) управления. Блок управления содержит блок информирования о единице хранения, оснащенный: средством информирования о информации, о местонахождении единицы хранения в системе, и базу данных с целью хранения упомянутой информации о единице хранения для дальнейшего использования. Улучшается адаптируемость системы. 13 з.п. ф-лы, 3 ил.
Формула
Документы, цитированные в отчёте о поиске
Оборудование для укладки не имеющих поддонов упаковок различных размеров на стеллажи товарного склада
Комментарии