Исполнительный механизм, узел шасси летательного аппарата, летательный аппарат и набор деталей для изготовления исполнительного механизма - RU2486104C2
Код документа: RU2486104C2
Чертежи




Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к исполнительным механизмам, в частности, но не исключительно, электромеханическим исполнительным механизмам, защищенным от заклинивания и служащим для приведения в движение компонентов летательного аппарата.
Уровень техники
Исполнительные механизмы могут использоваться для того, чтобы вызвать движение таких компонентов летательного аппарата, как шасси. Система исполнительного механизма для выдвижения (выпуска) шасси летательного аппарата должна, разумеется, обладать высокой целостностью и иметь очень малую вероятность отказа. Этого можно, например, обеспечить за счет применения вторичной, или аварийной, системы выдвижения шасси из убранного положения (перед посадкой) и для открывания дверей отсека шасси в случае отказа нормальной системы выпуска шасси. Подобная аварийная система выдвижения должна потребоваться не только для выдвижения шасси из убранного положения, но также и из любого промежуточного положения, например в случае невозможности полностью выпустить шасси.
Известная система выпуска шасси, использующая гидромеханический исполнительный механизм, содержит как обычную систему выдвижения шасси, которая основана на активной работе гидромеханического исполнительного механизма, но также и аварийную систему выдвижения.
Аварийная система выдвижения, известная также как система выпускающегося шасси под действием собственной массы, позволяет выпускать шасси и открывать двери под действием силы тяжести. При работе аварийной системы выпуска шасси динамика гидравлической жидкости в гидромеханическом исполнительном механизме при выпуске шасси обеспечивает достаточное демпфирование (в направлении нижнего фиксированного положения), которое позволяет предотвратить повреждение шасси. Гидромеханический исполнительный механизм построен таким образом, что, когда шасси достигает полностью развернутого положения, исполнительный механизм не испытывает никакой нагрузки при изгибающем моменте, воздействующем на шасси или корпус летательного аппарата (с другой стороны, предполагается, что скольжение поршня гидравлического исполнительного механизма внутри цилиндра исполнительного механизма не исключается).
Существует потребность уменьшить зависимость больших коммерческих самолетов от гидравлических систем и, следовательно, текущая необходимость использовать электрические исполнительные механизмы там, где ранее применялись гидромеханические. Существует два типа электрических исполнительных механизмов, которые могли бы быть здесь использованы, - это приводные исполнительные механизмы непрямого действия и приводные исполнительные механизмы прямого действия.
Исполнительные механизмы непрямого действия используют коробки передач, червячные передачи или аналогичные механизмы для преобразования вращательного движения электрического двигателя либо в низкоскоростное поступательное (линейное) движение с большой силой тяги, либо в низкоскоростное вращательное движение с большим вращательным моментом, в то время как исполнительные механизмы прямого действия (известные также под названием линейные двигатели) непосредственно преобразуют электрическую энергию в линейное перемещение.
Исполнительные механизмы прямого действия имеют высокую надежность, но не всегда способны удовлетворять требованиям, касающимся системы втягивания и выпуска шасси для определенных применений на летательном аппарате. Исполнительные механизмы непрямого действия способны удовлетворять многим подобным требованиям (таким, как масса, занимаемый объем, выходная мощность, достигаемое вытяжение), однако в них существует повышенная вероятность заклинивания по сравнению с исполнительными механизмами прямого действия или гидравлическими цилиндрами за счет использования механизмов для преобразования движения двигателя в требуемое рабочее перемещение.
Настоящее изобретение имеет своей целью получить такой исполнительный механизм, который уменьшал бы влияние одного или нескольких упомянутых выше недостатков. С другой стороны, или в дополнение к указанному выше, настоящее изобретение имеет своей целью создать усовершенствованный исполнительный механизм. С другой стороны, или в дополнение к указанному выше, настоящее изобретение имеет своей целью создать исполнительный механизм, защищенный от заклинивания для использования на летательном аппарате, который не зависел бы от центральной гидравлической системы летательного аппарата, например исполнительный механизм, выполненный в виде приводного электрического исполнительного механизма непрямого действия.
Раскрытие изобретения
Настоящее изобретение предлагает исполнительный механизм, содержащий первое и второе устройства линейного перемещения, в котором первое устройство линейного перемещения содержит первый винт линейного перемещения, первую гайку и первый первичный движитель, выполненные таким образом, чтобы обеспечивать относительное линейное перемещение между первым винтом линейного перемещения и первой гайкой, второе устройство линейного перемещения содержит второй винт линейного перемещения, вторую гайку и второй первичный движитель, выполненные таким образом, чтобы обеспечивать относительное линейное перемещение между вторым винтом линейного перемещения и второй гайкой, исполнительный механизм выполнен таким образом, что он выдвигается либо в результате относительного движения между первым винтом линейного перемещения и первой гайкой, либо в результате относительного движения между вторым винтом линейного перемещения и второй гайкой, и первое, и второе устройства линейного перемещения выполнены таким образом, что в случае заклинивания одного устройства линейного перемещения, первого или второго, работа другого устройства линейного перемещения, первого или второго, не прерывается.
Такой исполнительный механизм является, следовательно, защищенным от заклинивания в том отношении, что, если одно из устройств линейного перемещения, первое или второе, заклинивает, то другое может быть использовано для выдвижения исполнительного механизма. В некоторых вариантах исполнения первое и второе устройства линейного перемещения могут быть выполнены таким образом, что исполнительный механизм может двигаться к полностью выдвинутому состоянию в результате работы только первого или только второго устройства линейного перемещения. Иными словами, как первое, так и второе устройства линейного перемещения могут быть выполнены таким образом, что каждое из устройств линейного перемещения может независимо обеспечивать полное выдвижение исполнительного механизма в случае отказа другого устройства линейного перемещения.
Конечно, по меньшей мере, одно (а желательно оба) устройство линейного перемещения выполнено таким образом, чтобы оно вызывало бы движение, позволяющее производить процесс втягивания исполнительного механизма. Для некоторых применений втягивание исполнительного механизма может оказаться менее важным, чем его надежное выдвижение.
Существуют известные примеры исполнительных механизмов, которые обеспечивают устойчивость к заклиниванию, в частности раскрытые в патентах США 4,637,272 и 5,144,851. В каждом из этих патентов описан электрический исполнительный механизм, устойчивый к заклиниванию и в определенной степени использующий дублирование, однако обоим исполнительным механизмам свойственны существенные недостатки.
Исполнительный механизм, описанный в патенте США 4,637,272, использует один общий винт линейного перемещения, связанный с двумя отдельными и независимыми приводными устройствами. Недостаток подобной организации заключается в том, что длина исполнительного механизма в этом случае превышает необходимую. Исполнительный механизм по патенту США US 5,144,851 использует один общий двигатель, но имеет при этом два пути подачи энергии, в результате чего исполнительный механизм оказывается устойчивым к заклиниванию одного из путей подачи энергии. Однако при этом исполнительный механизм, описанный в патенте США 5,144,851, не является устойчивым к отказу или заклиниванию двигателя.
Желательно, чтобы оси первого и второго винтов линейного перемещения были бы параллельны. Части первого и второго винтов линейного перемещения могут быть выполнены таким образом, что они будут находиться в одном и том же положении вдоль этих винтов, когда исполнительный механизм находится во втянутом состоянии. Подобное устройство позволяет получить существенный выигрыш в пространстве, которое занимает исполнительный механизм. Часть одного, первого и второго, винтов линейного перемещения может быть выполнена таким образом, что она будет располагаться внутри, по крайней мере, части другого, первого или второго, винта линейного перемещения, когда исполнительный механизм находится во втянутом положении. Например, один винт линейного перемещения может иметь канал, образованный, по крайней мере, на части его длины, который создает открытый конец данного винта линейного перемещения, при этом другой винт линейного перемещения располагается внутри этого канала.
Первое устройство линейного перемещения может иметь обратный ход. Это позволяет при использовании исполнительного механизма ограничить его перемещение для того, чтобы скомпенсировать перемещение, вызванное, например, изгибающим моментом компонента, на который воздействует исполнительный механизм, или изгибающим моментом конструкции, в которой исполнительный механизм размещается, что позволяет тем самым уменьшить или исключить любую результирующую реактивную нагрузку, действующую через исполнительный механизм.
Первое устройство линейного перемещения может быть выполнено таким образом, что оно будет являться первичным средством, обеспечивающим выдвижение и втягивание исполнительного механизма.
Таким образом, второе устройство линейного перемещения может рассматриваться как резервное средство на случай отказа первого устройства линейного перемещения. В частности, там, где первое устройство линейного перемещения действует в качестве резервного средства, второе устройство линейного перемещения может не иметь обратного хода. Второе устройство линейного перемещения, таким образом, не только способно действовать как исполнительное средство, но позволяет также фиксировать положение под нагрузкой, не требуя при этом, чтобы второй двигатель сообщал вращающий момент какой-либо части этого устройства. Второе устройство линейного перемещения может иметь обратный ход с низким кпд. Как первое, так и второе устройства линейного перемещения могут иметь обратный ход, но при этом механический кпд второго устройства линейного перемещения может быть ниже, чем первого. Поэтому, чтобы второе устройство смогло выдерживать положение под нагрузкой, оно должно быть дополнительно оснащено тормозом.
Каждое из устройств линейного перемещения (первое или второе) либо оба могут быть выполнены таким образом, что винт линейного перемещения и гайка соответствующего устройства выполняются в виде узла (сборки), содержащего ролико-винтовую передачу (пару). Узел ролико-винтовой передачи может быть выполнен в любой подходящей форме, например в виде узла планетарной ролико-винтовой передачи или узла рециркуляционной ролико-винтовой передачи. Винт линейного перемещения и гайка также могут быть выполнены в виде узла рециркуляционной шариково-винтовой передачи (пары). Винт линейного перемещения и гайка могут также быть выполнены в виде узла, содержащего передачу (пару) винт-гайка скольжения (конструкция ACME).
Первичный движитель каждого из устройств линейного перемещения или обоих может представлять собой электрический двигатель. Первичный движитель, связанный с первым устройством линейного перемещения, может быть больше, массивнее и (или) мощнее первичного движителя второго устройства линейного перемещения.
Первичный движитель каждого из устройств линейного перемещения или обоих может быть непосредственно соединен с узлом винта линейного перемещения или гайки. Первичный движитель может быть также соединен с узлом винта линейного перемещения или гайкой в сборе не напрямую, а, например, посредством коробки передач.
Относительное линейное перемещение (движение), которое может быть вызвано одним устройством линейного перемещения, первым или вторым, может вызвать относительное линейное перемещение между гайкой и первичным движителем этого устройства линейного перемещения. Относительное линейное перемещение, которое может быть вызвано одним устройством линейного перемещения, первым или вторым, может вызвать относительное линейное перемещение между винтом линейного перемещения и первичным движителем данного устройства линейного перемещения. Одно из устройств линейного перемещения может вызывать относительное перемещение между гайкой и первичным движителем данного устройства линейного перемещения, в то время как другое устройство линейного перемещения может вызвать относительное линейное движение между винтом линейного перемещения и первичным движителем другого устройства линейного перемещения. Относительное линейное движение, которое может быть вызвано одним устройством линейного перемещения, первым или вторым, может вызвать движение, по меньшей мере, одного, первого или второго, первичного движителя.
Исполнительный механизм выполнен, преимущественно, таким образом, чтобы он позволял вызывать перемещение компонентов летательного аппарата, в частности шасси.
Настоящее изобретение включает в себя также узел шасси, содержащий опору шасси, поддерживающую, по меньшей мере, одно колесо летательного аппарата и исполнительный механизм для выдвижения шасси.
При этом данный исполнительный механизм представляет собой исполнительный механизм, который соответствует всем аспектам описываемого здесь изобретения. Данное изобретение включает в себя также летательный аппарат, содержащий подобный узел шасси. Сухой вес летательного аппарата может превышать 50 тонн, а предпочтительнее 200 тонн. Размер летательного аппарата может быть эквивалентен размеру воздушного судна, предназначенного для перевозки более 75 пассажиров, а предпочтительнее более 200 пассажиров. Будет, конечно, понятно, что признаки различных аспектов настоящего изобретения, касающиеся исполнительного механизма по данному изобретению, могут быть включены в узел шасси и летательный аппарат по данному изобретению.
Настоящее изобретение предлагает также набор деталей для изготовления исполнительного механизма в соответствии со всеми аспектами описанного здесь изобретения. Этот набор может содержать первый и второй винты линейного перемещения, а также первую и вторую гайки линейного перемещения. Набор может также содержать первый и второй первичные движители. Будет, конечно, понятно, что признаки различных аспектов настоящего изобретения, касающиеся исполнительного механизма по данному изобретению, могут быть включены в данный аспект изобретения, касающийся набора деталей.
Краткое описание чертежей
Ниже, исключительно в качестве примера, будет описан один из вариантов исполнения настоящего изобретения со ссылками на следующие чертежи:
Фигура 1 - Вид в разрезе исполнительного механизма в соответствии с рассматриваемым вариантом исполнения настоящего изобретения.
Фигуры с 2 по 4 показывают вид в разрезе отдельных частей, представленных на Фигуре 1.
Фигуры с 5 по 8 показывают вид в разрезе исполнительного механизма в различных состояниях.
Осуществление изобретения
На Фигурах иллюстрируется один из вариантов исполнения настоящего изобретения, касающийся защищенного от заклинивания электромеханического приводного исполнительного механизма непрямого действия, предназначенного для использования в системе втягивания и выпуска переднего шасси больших коммерческих пассажирских самолетов.
Преимущество исполнительного механизма данного варианта исполнения перед электрическими линейными двигателями прямого действия заключается в способности преобразовывать высокоскоростное вращательное движение электрического двигателя с малым вращательным моментом в низкоскоростное движение с большим моментом.
На Фигуре 1 показан разрез приводного исполнительного механизма непрямого действия, соответствующий рассматриваемому варианту исполнения настоящего изобретения. Исполнительный механизм 2 содержит первое и второе устройства линейного перемещения, каждое из которых обеспечивает выдвижение исполнительного механизма или его втягивание (если перед этим он был выдвинут этим устройством) в зависимости от направления, в котором это устройство приводится в движение. Таким образом, противоположные концы 4а и 4в исполнительного механизма, при помощи которых последний может быть соединен соответственно с фиксированной конструкцией и с подвижным компонентом, могут двигаться в направлении друг к другу или друг от друга. Исполнительный механизм связан с передним шасси за счет соединения подвижного конца 4b исполнительного механизма 2 с опорой шасси.
Каждое устройство линейного перемещения содержит винт линейного перемещения и гайку в виде ролико-винтовой передачи (пары). Гайка выполняет роль планетарной составляющей ролико-винтовой передачи. Она вращается вокруг оси и перемещается вверх и вниз по длине винта. Кроме того, устройство линейного перемещения оснащено электрическим бесщеточным двигателем постоянного тока, служащим для создания относительного перемещения между гайкой и винтом. Таким образом, первый винт линейного перемещения 10, первая гайка 12 и первый электрический двигатель 14 образуют первое устройство линейного перемещения, а второй винт линейного перемещения 20, вторая гайка 22 и второй электрический двигатель 24 образуют второе устройство линейного перемещения. Оба двигателя, 14 и 24, располагаются на одном конце главного корпуса 30, который простирается за пределы этих двигателей и практически охватывает оба винта линейного перемещения 10 и 20, когда исполнительный механизм находится во втянутом положении (это положение показано на Фигуре 1).
Первый винт линейного перемещения 10 имеет внутреннюю поверхность, образующую канал 18, в котором перемещается второй винт 20. Первый винт линейного перемещения 10 представляет собой винт обратного хода с высоким кпд, который непосредственно соединен с первым двигателем 14, что позволяет избежать использования коробки передач, которая могла бы увеличить вероятность заклинивания. Второй винт линейного перемещения 20 представляет собой винт только прямого хода с низким кпд (малым шагом). Кроме того, второй винт линейного перемещения 20 приводится в движение непрямым воздействием двигателя 24, который имеет меньшие размеры и более низкую мощность по сравнению с первым двигателем 14.
Один конец исполнительного механизма 4а, который соединен с прилегающей фиксированной конструкцией летательного аппарата, расположен на конце второго винта линейного перемещения 20. Другой конец 4в, который соединен с опорой переднего шасси, располагается на конце корпуса 32 гайки, в котором размещается первая гайка 12. Таким образом, один конец исполнительного механизма 4а может быть назван фиксированным концом 4а, а второй конец 4в - подвижным концом 4в.
Первый электрический двигатель 14 выполнен таким образом, что он производит вращение первого винта линейного перемещения 10, в результате чего гайка 12 линейно перемещается по всей длине этого винта. Движение гайки 12, которая связана с корпусом 32, заставляет корпус 32 этой гайки и, соответственно, подвижный конец 4в исполнительного механизма перемещаться относительно фиксированного конца 4а. Таким образом, исполнительный механизм 2 может втягиваться или выдвигаться в результате относительного линейного движения первого винта линейного перемещения 10 и первой гайки 12.
Второй электрический двигатель 24 выполнен таким образом, что он производит вращение второй гайки 22, в результате чего гайка 22 линейно перемещается по всей длине винта линейного перемещения 20. Гайка 22, соединенная со вторым электрическим двигателем, который, в свою очередь, соединен с главным корпусом 30, двигается вместе с главным корпусом 30, двигателями 14 и 24, первым винтом линейного перемещения 10, первой гайкой 12 и корпусом гайки 32. Таким образом, движение гайки 22 вызывает перемещение подвижного конца 4в относительно неподвижного конца 4а. Таким образом, исполнительный механизм 2 может выдвигаться в результате относительного линейного перемещения второго винта линейного перемещения 20 и второй гайки 22.
Первое и второе устройства линейного перемещения выполнены таким образом, что они работают независимо друг от друга. В результате заклинивание первого устройства линейного перемещения не прерывает работу второго устройства линейного перемещения. Исполнительный механизм является таким образом защищенным от заклинивания в том отношении, что в нем обеспечивается дублирование за счет существования первого и второго независимых устройств линейного перемещения.
Первое устройство линейного перемещения 10, 12, 14 исполнительного механизма 2 действует как обычная система выдвижения-втягивания шасси и, следовательно, сконструировано на весь жизненный цикл (т.е. на полный срок службы летательного аппарата). При нормальных условиях работы исполнительный механизм 2 при помощи первого устройства линейного перемещения 10, 12, 14 может выпускать (или убирать) шасси за 12 секунд. Как уже было упомянуто выше, сборка ролико-винтовой передачи 10, 12 первого устройства линейного перемещения имеет обратный ход и, следовательно, способно уменьшить нагрузку, возникающую при изгибающем моменте, оказываемом на корпус летательного аппарата и шасси при любом состоянии исполнительного механизма (полностью выдвинутого или полностью втянутого). Первое устройство линейного перемещения содержит тормоза (не показаны) для торможения двигателя 14 и удерживания таким образом исполнительного механизма 2 в выдвинутом состоянии. Второе устройство линейного перемещения 20, 22, 24 обеспечивает возможность аварийного выпуска шасси в случае пропадания электропитания или заклинивания первого устройства. Винт 20 и гайка 22 второго устройства линейного перемещения номинально не имеют обратного хода, но для торможения двигателя 24 предусмотрен тормоз 36. Второе устройство линейного перемещения 20, 22, 24 предназначено исключительно для ограниченного рабочего цикла, который предполагает, что второе устройство линейного перемещения используется только в качестве резервной системы, которая применяется, в первую очередь, при аварийных ситуациях. Поскольку второе устройство линейного перемещения 20, 22, 24 предназначено только для ограниченного рабочего цикла, его размеры могут быть уменьшены (например, по сравнению с первым устройством линейного перемещения 10, 12, 14). Соответственно, размеры второго устройства линейного перемещения, используемого в иллюстративном варианте исполнения, дают возможность поместить его внутри первого устройства линейного перемещения 10, 12, 14, позволяя тем самым сохранить общую длину исполнительного механизма.
Шаг исполнительного механизма составляет примерно 350 мм, а длина хода - порядка 370 мм (примерно по 10 мм на каждый конец). Длина исполнительного механизма в полностью втянутом состоянии порядка 850 мм, а диаметр в самой широкой части равен примерно 240 мм. Тяговая сила исполнительного механизма при работе первого устройства линейного перемещения составляет величину порядка 75 кН. Максимальная механическая мощность, необходимая для выработки этого усилия, составляет примерно 2.2 кВт, что соответствует максимальной электрической мощности двигателя 14 исполнительного механизма порядка 5 кВт. Общий вес исполнительного механизма равен примерно 20 кГ.
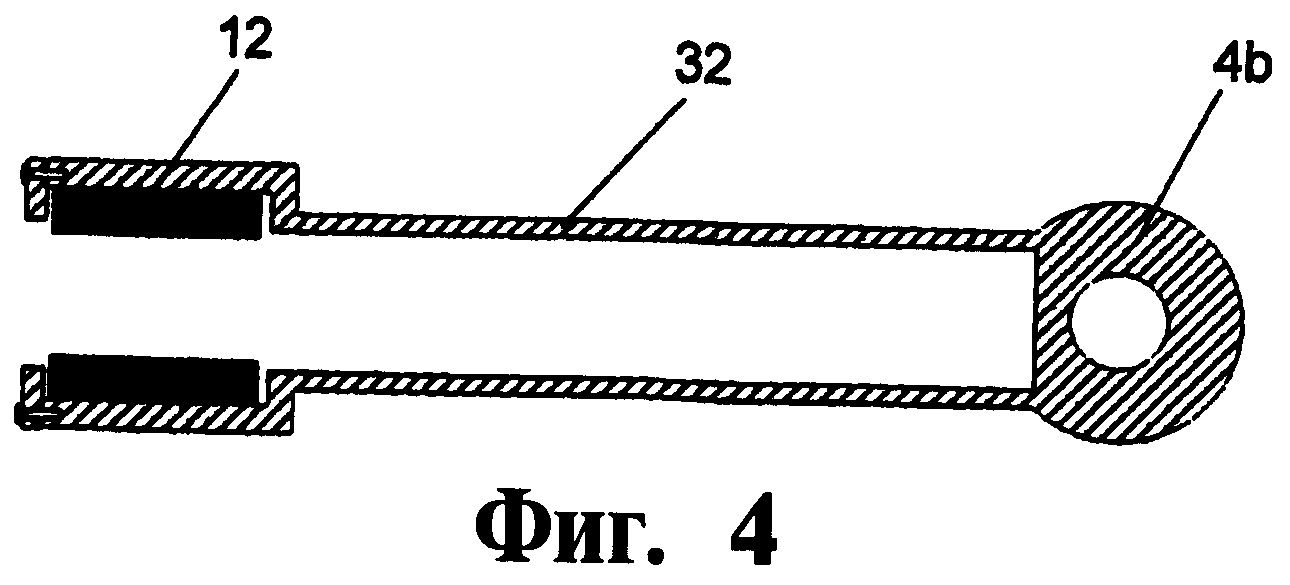
Отдельные составные элементы исполнительного механизма показаны в разрезе на Фигурах 2, 3 и 4. На Фигуре 2 показан второй винт линейного перемещения 20 и левосторонний фиксированный конец 4а, объединенные в единое целое. На Фигуре 3 показан первый двигатель 14, расположенный в первой части 30а главного корпуса 30, в котором также размещается первый пустотелый винт 10. На Фигуре 3 показан второй двигатель 24, расположенный во второй части 30в главного корпуса 30, в котором также размещается вторая гайка 22 и тормоз 36, установленный между гайкой 22 и второй частью 30b главного корпуса 30. При использовании обеих частей 30а, 30b корпуса 30 они соединяются между собой несколькими болтами 34, специально предусмотренными для этой цели. На Фигуре 4 показан корпус гайки 32, в котором размещается первая гайка 12 и располагается правосторонний подвижный конец 4b исполнительного механизма 2. Корпус гайки 32 и главный корпус 30 соединены между собой, например, при помощи шпонок (не показаны), что предотвращает относительное вращение этих двух частей, но допускает относительное линейное движение.
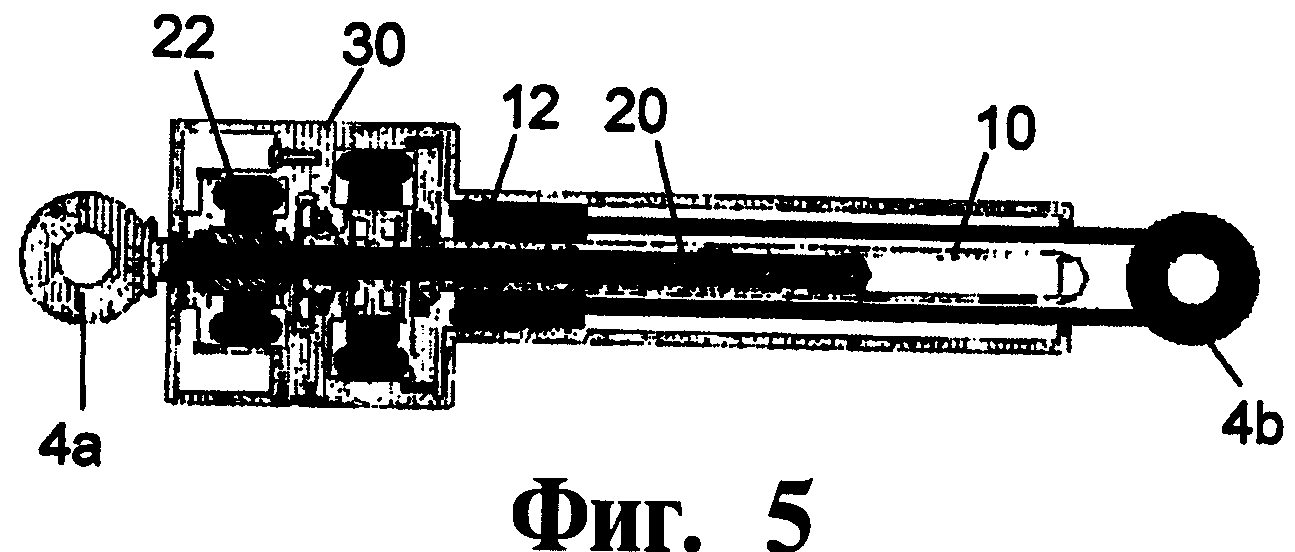
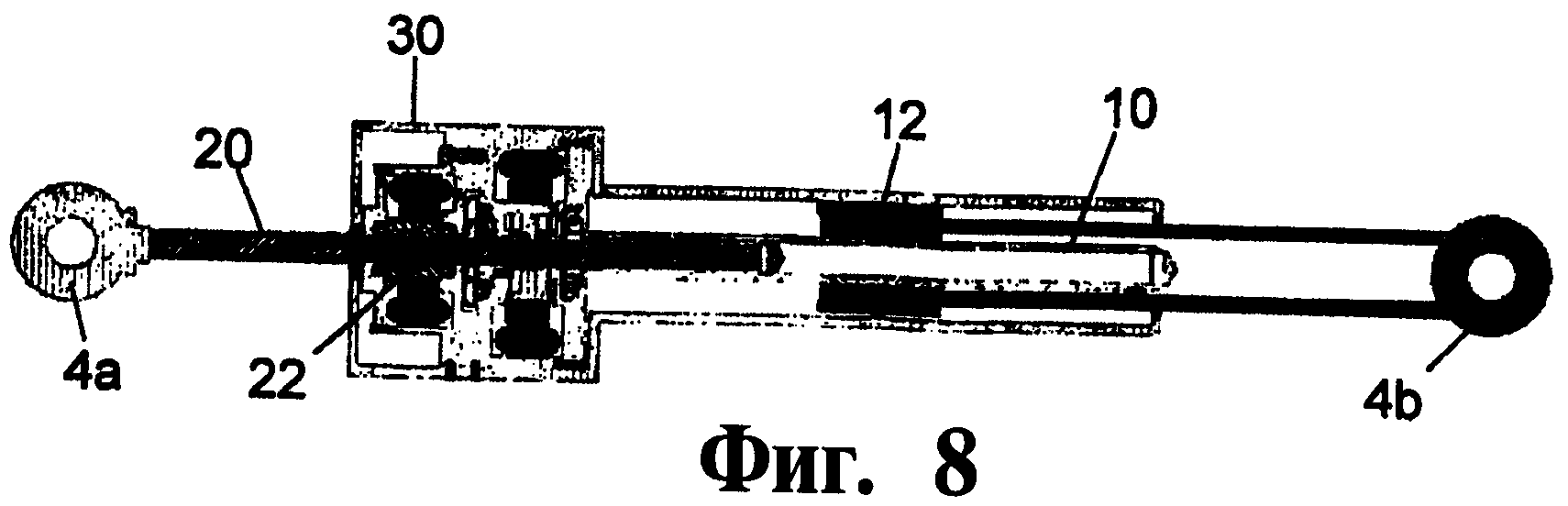
Далее работа исполнительного механизма будет описываться со ссылками на Фигуры 5-8. На Фигуре 5 показан исполнительный механизм в полностью втянутом положении. В таком положении первая гайка 12 располагается на левом конце первого винта 10 (как показано на Фигуре 5), а вторая гайка 22 помещается на левом конце второго винта 20. При нормальной работе первое устройство линейного перемещения используется для втягивания и выдвижения исполнительного механизма 2, который, в свою очередь, выпускает и убирает шасси летательного аппарата. На Фигуре 6 показан исполнительный механизм при полностью выдвинутом положении в результате работы только первого устройства линейного перемещения. В этом положении первая гайка 12 располагается на правом конце первого винта 10, в то время как вторая гайка 22 располагается на левом конце второго винта 20. Если первое устройство линейного перемещения не исправно и не может выдвинуть исполнительный механизм, то для его выдвижения и, следовательно, выпуска шасси может быть использовано второе устройство линейного перемещения. На Фигуре 7 исполнительный механизм показан в полностью выдвинутом состоянии, в котором он оказался в результате работы только второго устройства линейного перемещения. В этом положении первая гайка 12 располагается на левом конце первого винта 10, в то время как вторая гайка 22 располагается на правом конце второго винта 20. Если во время выдвижения исполнительного механизма первое устройство линейного перемещения вышло из строя и не может завершить выпуск шасси, то для завершения выдвижения исполнительного механизма может быть использовано второе устройство линейного перемещения, несмотря на то что выдвижение уже частично было произведено первым устройством линейного перемещения. На Фигуре 8 показан исполнительный механизм 2 в полностью выдвинутом положении, когда в результате работы первого устройства линейного перемещения он был сначала перемещен в промежуточное положение, а затем полное выдвижение было завешено при помощи второго устройства линейного перемещения. В этом положении первая гайка 12 располагается вдоль винта 10 в средней его части, а вторая гайка 22 помещается в средней части второго винта 20. Из рассмотрения Фигур 7 и 8 должно быть понятно, что при использовании в работе исполнительного механизма второго, аварийного, устройства линейного перемещения главный корпус 30, включая двигатели 14, 24, перемещается вместе с подвижным концом 4b исполнительного механизма 2.
Таким образом, данный вариант исполнения настоящего изобретения представляет собой исполнительный механизм, использующий резервирование замещением и состоящий из двух спаренных (спина к спине) ролико-винтовых передач, каждая из которых использует независимый электрический двигатель. В результате применения подобной конструкции и независимости первого и второго устройств линейного перемещения для аварийного выпуска шасси не требуется отсоединять или перекомпоновывать отказавшее устройство линейного перемещения.
Варианты исполнения настоящего изобретения преимущественно предлагают, главным образом, исполнительный механизм, который использует два полностью независимых устройства линейного перемещения. Например, устройства линейного перемещения исполнительного механизма в соответствии с некоторыми вариантами исполнения настоящего изобретения не имеют взаимных соединений или взаимосвязей, поскольку каждое устройство линейного перемещения содержит независимые винт, гайку и двигатель. Каждое устройство перемещения может действовать независимо, обеспечивая полное выдвижение исполнительного механизма. Несмотря на то что настоящее изобретение описано и проиллюстрировано со ссылкой на конкретный вариант исполнения, специалисту средней квалификации должно быть понятно, что данное изобретение может иметь различные варианты исполнения, здесь не проиллюстрированные.
Описанный выше вариант исполнения предполагает, что только первое устройство линейного перемещения может втягивать исполнительный механизм (который был выдвинут этим устройством) и, следовательно, перемещать шасси из выпущенного, или промежуточного, положения в убранное положение. Таким образом, данный вариант исполнения предполагает, что в случае заклинивания первого устройства линейного перемещения в положении полностью или частично выпущенного шасси второе устройство линейного перемещения не сможет полностью втянуть исполнительный механизм. Однако, если заклинивание или отказ первого устройства линейного перемещения произошел при полностью втянутом положении, второе устройство линейного перемещения смогло бы полностью выдвинуть, а затем полностью втянуть исполнительный механизм. Данный исполнительный механизм может быть модифицирован таким образом, что в случае, когда первое устройство линейного перемещения исполнительного механизма заклинило или отказало, находясь в любом положении, второе устройство линейного перемещения может быть использовано для втягивания исполнительного механизма. Такие функциональные возможности могут быть обеспечены, например, путем удвоения длины второго винта и центрирования этого винта на гайке (в нейтральном положении второго устройства линейного перемещения).
Проигрыш по весу в такой модификации был бы незначительным ввиду малой длины этого винтового блока. Второе устройство линейного перемещения может, следовательно, использоваться в ограниченные периоды времени (например, до конца дня) как для выдвижения, так и для втягивания исполнительного механизма и, соответственно, шасси независимо от того, в каком положении заклинило или отказало первое устройство линейного перемещения. Тем самым может быть повышена заявленная надежность летательного аппарата.
Состояние первого винта линейного перемещения может активно контролироваться при помощи системы контроля рабочего состояния оборудования с целью обнаружения и предотвращения какого-либо ухудшения его работы, которое может привести к заклиниванию. За счет текущего контроля рабочего состояния винта и устранения всех малейших дефектов до того, как они приведут к положению, при котором вероятность заклинивания окажется существенной, второй, резервный, винт линейного перемещения может быть зарезервирован только для аварийного использования. Надежность при этом потребуется даже меньше количества рабочих циклов на протяжении его срока эксплуатации. Подобная система контроля текущего рабочего состояния может содержать датчики положения, силы и тока для отслеживания усилий, вырабатываемых исполнительным механизмом, и обнаруживать износ и ухудшение работы.
Хотя описанный выше вариант исполнения использует планетарные ролико-винтовые передачи, тем не менее здесь может быть использовано любое подходящее устройство преобразования вращательного движения в линейное перемещение, например шариково-винтовые передачи.
Там где упоминаемые в вышеприведенном описании узлы или элементы имеют известные, очевидные или предсказуемые эквивалентные варианты исполнения, то предполагается, что эти эквиваленты включены в настоящее описание как ранее отдельно изложенные. Для определения истинной области притязаний настоящего изобретения следует обратиться к формуле изобретения, которая предполагает охват всех этих эквивалентных вариантов исполнения. Лицу, знакомящемуся с сущностью данного изобретения, должно быть понятно, что узлы или признаки настоящего изобретения, которые описаны здесь в качестве предпочтительных, преимущественных, удобных и т.п., являются лишь возможными вариантами и не ограничивают область притязаний независимых пунктов формулы изобретения.
Реферат
Настоящее изобретение относится к исполнительным механизмам, защищенным от заклинивания и служащим для приведения в движение компонентов летательного аппарата. Исполнительный механизм перемещения находящегося под нагрузкой изгибающего момента компонента летательного аппарата состоит из первого устройства линейного перемещения и второго устройства линейного перемещения. Первое устройство линейного перемещения содержит первый винт линейного перемещения, первую гайку и первый первичный движитель, выполненные таким образом, что они обеспечивают относительное движение между винтом и гайкой. Второе устройство линейного перемещения содержит второй винт линейного перемещения, вторую гайку и второй первичный движитель, выполненные таким образом, что они обеспечивают относительное движение между вторым винтом и гайкой. Каждое из упомянутых устройств линейного перемещения позволяет выдвигать исполнительный механизм и выполнено таким образом, что в случае заклинивания одного устройства линейного перемещения, первого или второго, нормальная работа другого не нарушается. Первое устройство линейного перемещения установлено с возможностью обратного перемещения. Техническим результатом является уменьшение вероятности заклинивания исполнительных механизмов. 4 н. и 5 з.п. ф-лы, 8 ил.
Комментарии