Устройство усилителя рулевого управления - RU2742498C2
Код документа: RU2742498C2
Чертежи

















Описание
Область техники
[0001] Настоящее изобретение относится к устройству усилителя рулевого управления, применимому, например, к автомобильному транспортному средству.
Уровень техники
[0002] Устройство усилителя рулевого управления этого вида известно из патентного документа 1.
[0003] В технологии, описанной в упомянутом патентном документе 1, датчик капель воды устанавливается на внутренней периферии контактного вывода картера коробки передач. Когда этот датчик капель воды определяет каплю воды, прилипшую к зубчатой рейке, водитель транспортного средства информируется в отношении того, что анормальность формируется в устройстве усилителя рулевого управления.
Предварительно опубликованные документы
Патентные документы
[0004] Патентный документ 1. Первая публикация заявки на патент (Япония) (tokkai): № 2006-111032.
Сущность изобретения
Задачи, решаемые изобретением
[0005] Тем не менее, в вышеописанном традиционном устройстве усилителя рулевого управления, определение анормальностей основано на проникновении воды. Следовательно, устанавливается еще один элемент (вышеописанный датчик капель воды) в дополнение к компонентам устройства. Таким образом, невозможно избежать увеличения затрат на устройство.
[0006] Помимо этого, даже в случае, если капля воды прилипает к валу зубчатой рейки, зачастую возникают случаи, в которых не появляется серьезное неудобство на основе коррозии, развивающейся вследствие капли воды, такое как фиксация вала зубчатой рейки. Тем не менее, когда определяется капля воды, традиционное устройство немедленно определяет возникновение анормальности. В это время, имеется вероятность того, что выполняется не всегда необходимая замена компонента (или замена всего устройства).
[0007] С учетом вышеописанной задачи, цель настоящего изобретения заключается в том, чтобы предоставить устройство усилителя рулевого управления, которое допускает определение только анормальности, требуемой для устройства, без увеличения затрат.
Средство для решения задачи
[0008] Согласно настоящему изобретению, устройство усилителя рулевого управления содержит: схему вычисления средних значений нагрузки по рулению, которая вычисляет среднее значение для соответствующего значения нагрузки по рулению, которое представляет собой, в частности, любое из крутящего момента поворота при рулении в течение предварительно определенного интервала времени, командного тока электромотора, который управляет с возможностью приведения в действие электромотором, и фактического тока электромотора, который фактически протекает через электромотор; и схему определения анормальностей, которая сравнивает среднее значение для соответствующего значения нагрузки по рулению с заданным значением, сохраненным в модуле управления, чтобы определять анормальность устройства, когда среднее значение превышает заданное значение.
Преимущества изобретения
[0009] Согласно настоящему изобретению, состояние, в котором среднее значение, введенное из существующей конструкции устройства, превышает заданное значение, задается как анормальность, и выполняется определение анормальностей. Появляется возможность определять степень распространения коррозии, развивающейся в механизме рулевого управления за счет нагрузки по рулению устройства. Таким образом, только требуемая анормальность может определяться без использования другого элемента.
[0010] Другими словами, даже если коррозия развивается в механизме рулевого управления, сразу не формируется серьезное неудобство, такое как фиксация механизма рулевого управления. Нагрузка по рулению увеличивается вместе со степенью распространения коррозии, и в качестве конечной стадии, формируется серьезное неудобство, такое как фиксация механизма рулевого управления. Таким образом, появляется возможность определять только действительно опасную анормальность для устройства посредством определения нагрузки по рулению, которая увеличивается вместе со степенью распространения коррозии, как описано выше.
Краткое описание чертежей
[0011] Фиг. 1 является видом примерной конфигурации устройства усилителя рулевого управления согласно настоящему изобретению.
Фиг. 2 является видом со стрелками устройства усилителя рулевого управления при просмотре из направления A, показанного на фиг. 1.
Фиг. 3 является видом в поперечном сечении вдоль линии B-B на фиг. 2.
Фиг. 4 является блок-схемой управления ECU, показанного на фиг. 1, представляющей первый предпочтительный вариант осуществления устройства усилителя рулевого управления согласно настоящему изобретению.
Фиг. 5 является блок-схемой последовательности операций способа, представляющей последовательность операций управления секции определения коррозии на фиг. 4.
Фиг. 6 является блок-схемой последовательности операций способа, представляющей подробные сведения по процессу усреднения на фиг. 5.
Фиг. 7 является блок-схемой последовательности операций способа, представляющей управление по фиг. 5 с учетом угла поворота при рулении и скорости руления.
Фиг. 8 является блок-схемой последовательности операций способа, представляющей управление по фиг. 7 с добавлением определения тряски руля.
Фиг. 9 является блок-схемой последовательности операций способа, представляющей управление по фиг. 5 с учетом угла поворота при рулении и скорости относительно вертикальной оси.
Фиг. 10 является блок-схемой последовательности операций способа, представляющей управление по фиг. 5 с учетом скорости вращения ходовых колес.
Фиг. 11 является блок-схемой последовательности операций способа, представляющей управление по фиг. 5 с учетом среднего значения непосредственно перед выключением (переключателя) зажигания в предшествующее время.
Фиг. 12 является блок-схемой последовательности операций способа, представляющей подробные сведения по процессу усреднения по фиг. 10.
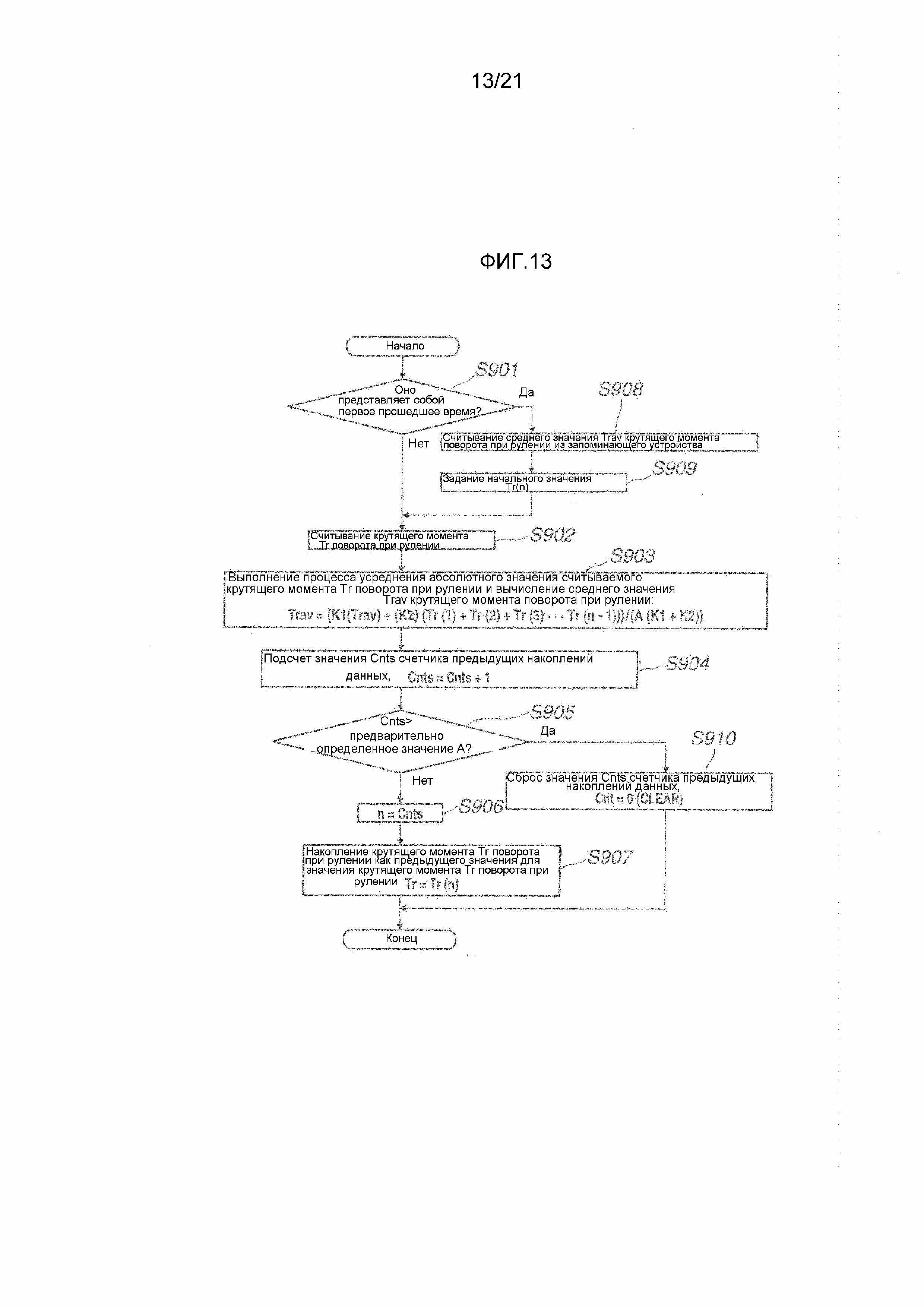
Фиг. 13 является блок-схемой последовательности операций способа, представляющей процесс усреднения по фиг. 12 с добавлением взвешивания.
Фиг. 14 является блок-схемой последовательности операций способа, представляющей управление по фиг. 5 с добавлением процесса постепенного уменьшения командного тока электромотора.
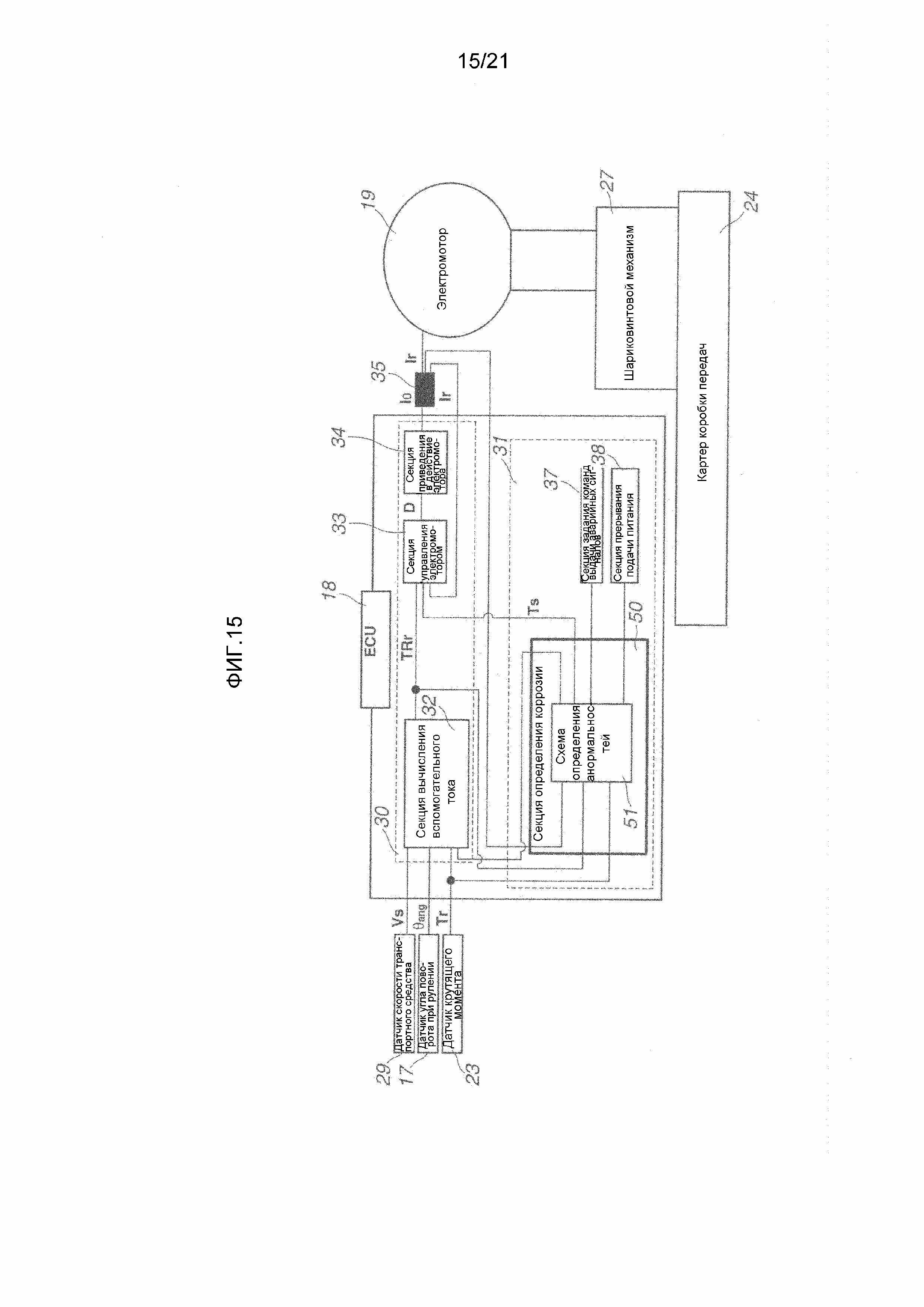
Фиг. 15 является блок-схемой управления ECU, показанного на фиг. 1, представляющей второй предпочтительный вариант осуществления устройства усилителя рулевого управления согласно настоящему изобретению.
Фиг. 16 является блок-схемой последовательности операций способа, представляющей последовательность операций управления секции определения коррозии на фиг. 15.
Фиг. 17 является блок-схемой последовательности операций способа, представляющей управление по фиг. 16 с добавлением процесса в соответствии со значением частоты возникновения анормальности.
Фиг. 18 является блок-схемой последовательности операций способа, представляющей управление по фиг. 16 с использованием командного тока электромотора вместо крутящего момента поворота при рулении при управлении по фиг. 16.
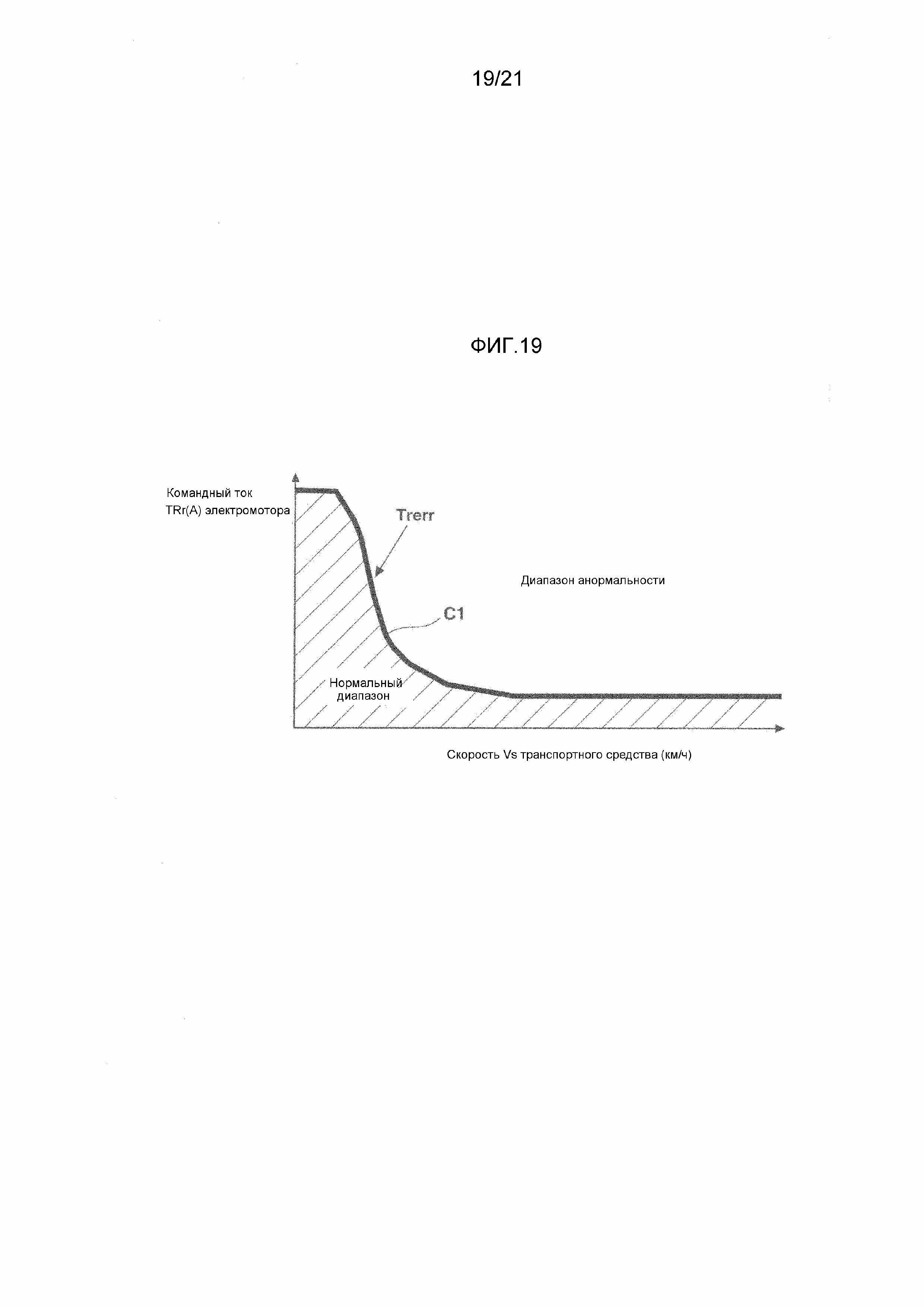
Фиг. 19 является представлением в форме карты, представляющим подробные сведения по диапазону MAP1 анормальности, показанному на фиг. 18.
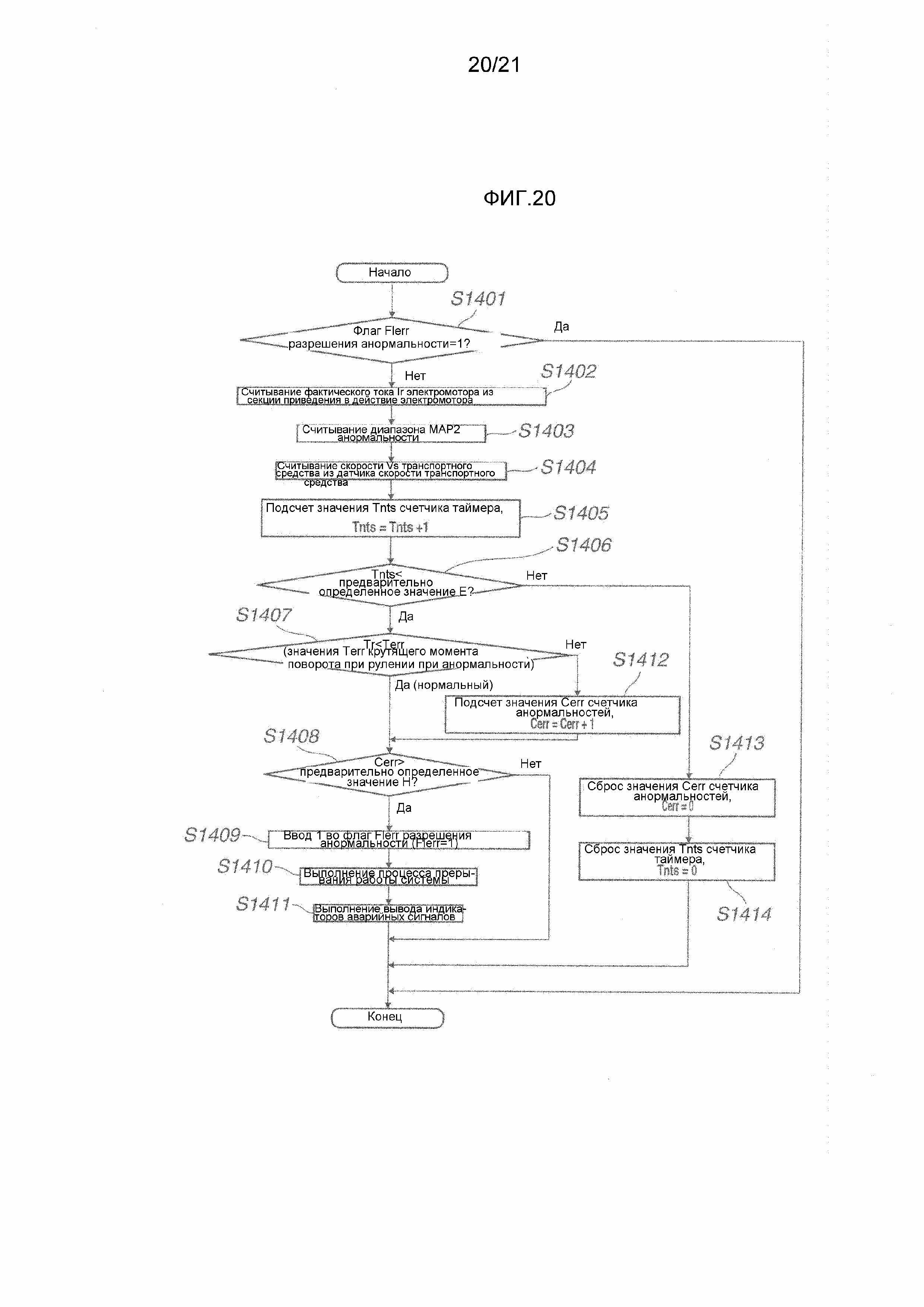
Фиг. 20 является блок-схемой последовательности операций способа, представляющей управление по фиг. 16 с использованием фактического тока электромотора в качестве замены крутящего момента поворота при рулении.
Фиг. 21 является видом, представляющим подробные сведения по диапазону MAP2 анормальности на фиг. 21.
Подробное описание вариантов осуществления изобретения
[0012] Первый вариант осуществления
В дальнейшем в этом документе описываются предпочтительные варианты осуществления устройства усилителя рулевого управления согласно настоящему изобретению на основе чертежей.
[0013] Как показано на фиг. 1-3 руль 1, расположенный в кабине водителя транспортного средства 3, и управляемые колеса 2, 3, которые представляют собой передние правое и левое ходовые колеса, механически сцепляются между собой посредством механизма рулевого управления. Этот механизм рулевого управления включает в себя: рулевой вал 6, неразъемно сцепленный с возможностью вращения через промежуточный вал 4 и универсальный карданный шарнир 5; вал 7 шестерни, изготовленный из стального материала и сцепленный с рулевым валом 6 через торсионный вал (не показан); и зубчатую рейку 8, изготовленную из стального материала, на внешней периферии которой рейка 8A, в зацеплении с ведущей шестерней 7A, устанавливается на внешней периферии вала 7 шестерни. Обе концевых секции зубчатой рейки 8 сцеплены с соответствующими управляемыми колесами 2, 3 через шаровые шарниры 9, 10, поперечные рулевые тяги 11, 12, рычаги 13, 14 поворотных кулаков и т.д.
[0014] В такой конструкции, как описано выше, когда водитель выполняет операцию поворота руля 1, промежуточный вал 4 и рулевой вал 6, соответственно, вращаются вокруг своих осей, так что торсионный вал скручивается. Сила упругости торсионного вала, сформированная за счет этого, заставляет вал 7 шестерни вращаться после рулевого вала 6. Таким образом, вращательное движение вала 7 шестерни преобразуется в линейное движение вдоль осевого направления зубчатой рейки 8 посредством механизма реечной передачи, описанного выше. Направление управляемых колес 2, 3 модифицируется посредством тяги рычагов 13, 14 поворотных кулаков в направлении ширины транспортного средства через шаровые шарниры 9, 10 и поперечные рулевые тяги 11, 12.
[0015] В кожухе 16 датчиков, размещающем периферию рулевого вала 6 и вала 7 шестерни, в качестве элементов датчика для того, чтобы определять различные виды информации руления, размещены датчик 17 угла поворота при рулении для определения угла поворота при рулении рулевого вала 6 (фиг. 4) и датчик 23 крутящего момента для определения крутящего момента поворота при рулении, введенного в рулевой вал 6, на основе относительной разности углов оборота между рулевым валом 6 и валом 7 шестерни вследствие скручивания торсионного вала (фиг. 4).
[0016] Кроме того, гофрированные пыльники 25, 26 располагаются вдоль внешней периферии одной торцевой стороны поперечных рулевых тяг 11, 12 на обоих осевых концах картера 24 коробки передач, размещающего периферию зубчатой рейки 8. Эти пыльники 25, 26 формируются с тем, чтобы обеспечивать предварительно определенную гибкость, например, посредством материала из синтетического каучука и т.п., и эти пыльники 25, 26 предотвращают проникновение воды, пыли и т.д. в зубчатую рейку 8 и шариковинтовой механизм 27, который описывается ниже.
[0017] Электромотор 19 сцеплен с зубчатой рейкой 8 посредством соединения шкива 21 входного вала, прикрепленного к внешней периферии верхушки выходного вала 20 электромотора 19, со шкивом 22 выходного вала, прикрепленным к внешней периферии зубчатой рейки 8 через ремень 15. Следует отметить, что оба шкива 21, 22 и ремень 15 составляют трансмиссионный механизм. Затем шариковинтовой механизм 27, который представляет собой редукторный механизм и имеет форму канавки со спиральной навивкой, размещается между шкивом 22 и зубчатой рейкой 8.
[0018] Вышеописанный шариковинтовой механизм 27 содержит: канавку 8A под шариковый винт на стороне зубчатой рейки, установленную на внешней периферийной стороне зубчатой рейки 8 и имеющую форму спиральной канавки; гайку 44, кольцеобразно установленную таким образом, что в ней размещается зубчатая рейка 8, и расположенную с возможностью вращения относительно зубчатой рейки 8; канавку 44A под шариковый винт на стороне гайки, установленную на внутренней периферийной стороне гайки 44, имеющую форму спиральной канавки и составляющую канавку 45 для кругового движения шариков вместе с канавкой 8A под шариковый винт на стороне зубчатой рейки; множество металлических шариков 28, установленных внутри канавки 45 для кругового движения шариков; и трубку (элемент кругового движения), изготовленную из металла на основе железа (не показана), соединенную между одной торцевой стороной канавки 45 для кругового движения шариков, так что шарик 28 может совершать круговое движение от одной торцевой стороны канавки 45 для кругового движения шариков к другой торцевой стороне.
Частота вращения электромотора 19, передаваемого через ремень 15, уменьшается и преобразуется в прямолинейное движение зубчатой рейки 8.
[0019] Модуль 18 управления (ECU) сконструирован неразъемно с электромотором 19, имеет функцию сохранения и выполнения различных видов процессов управления и управляет с возможностью приведения в действие электромотором 19, который предоставляет крутящий момент усиления при рулении для механизма рулевого управления на основе информации руления в отношении угла поворота при рулении, крутящего момента поворота при рулении, скорости транспортного средства и т.д.
Ниже подробно описывается конкретная управляющая структура модуля 18 управления на основе фиг. 4.
[0020] Фиг. 4 является блок-схемой управления, представляющей подробные сведения по управляющей структуре модуля 18 управления.
[0021] Модуль 18 управления (ECU) включает в себя: секцию 30 задания команд управления вспомогательным током, которая вычисляет ток Io приведения в действие, приводящий в действие электромотор 19, на основе сигнала крутящего момента Tr поворота при рулении (в дальнейшем в этом документе называемого "крутящим моментом Tr поворота при рулении"), который представляет собой сигнал крутящего момента поворота при рулении, определенный посредством датчика 23 крутящего момента, сигнала Vs скорости транспортного средства (в дальнейшем в этом документе называемого "скоростью Vs транспортного средства"), определенного посредством датчика 29 скорости транспортного средства, например, установленного на дифференциале (не показан) и т.д., и выводит этот ток приведения в действие на сторону электромотора 19; и секцию 31 задания команд для определения анормальностей, которая определяет анормальность в устройстве усилителя рулевого управления на основе крутящего момента Tr поворота при рулении и т.д. и управляет секцией 30 задания команд управления вспомогательным током и т.д.
[0022] Секция 30 задания команд управления вспомогательным током содержит: секцию 32 вычисления вспомогательного тока, которая вычисляет командный ток TRr электромотора, который управляет с возможностью приведения в действие электромотором 19, на основе скорости Vs транспортного средства, сигнала θang угла поворота при рулении (в дальнейшем в этом документе называемого "углом θang поворота при рулении") и крутящего момента Tr поворота при рулении; секцию 33 управления электромотором, которая формирует сигнал D приведения в действие электромотора для электромотора 19 на основе командного тока TRr электромотора; и секцию 34 приведения в действие электромотора, которая подает ток Io приведения в действие электромотора для электромотора 19 в соответствии с сигналом D приведения в действие электромотора. Секция 35 определения тока электромотора, размещенная между секцией 34 приведения в действие электромотора и электромотором 19, служит для того, чтобы возвращать фактический ток Ir электромотора, фактически протекающий через электромотор 19, в секцию 33 управления электромотором.
[0023] Следует отметить, что каждый из крутящего момента Tr поворота при рулении, командного тока TRr электромотора и фактического тока Ir электромотора соответствует надлежащему значению нагрузки по рулению, описанному в формуле изобретения.
[0024] Секция 31 задания команд для определения анормальностей включает в себя: секцию 36 определения коррозии; секцию 37 задания команд выдачи аварийных сигналов, которая выполняет отображение индикатора аварийных сигналов для лампы аварийной сигнализации (не показана) в соответствии с процессом секции 36 определения коррозии; и секцию 38 прерывания подачи питания, которая прерывает подачу питания для электромотора 19 в соответствии с процессом в секции 36 определения коррозии. Секция 31 задания команд для определения анормальностей определяет анормальность на основе формирования коррозии в зубчатой рейке 8 и шариковинтовом механизме 27 и информирует водителя в отношении анормальности, чтобы привлекать внимание.
[0025] Секция 36 определения коррозии включает в себя: схему 39 вычисления средних значений нагрузки по рулению, которая вводит крутящий момент Tr поворота при рулении и вычисляет среднее значение крутящего момента поворота при рулении в течение предварительно определенного интервала времени; и схему 40 определения анормальностей, которая определяет присутствие или отсутствие анормальности в соответствии с результатом вычисления схемы 39 вычисления средних значений нагрузки по рулению.
[0026] Схема 39 вычисления средних значений нагрузки по рулению и схема 40 определения анормальностей вводят, в дополнение к крутящему моменту Tr поворота при рулении, скорости Vs транспортного средства, углу θang поворота при рулении, сигнал Yw скорости относительно вертикальной оси, определенный посредством установленного датчика 41 скорости относительно вертикальной оси, например, в центральной по весу секции транспортного средства (в дальнейшем в этом документе сокращенно называемый "скоростью Yw относительно вертикальной оси"), сигнал Vwr скорости вращения правого ходового колеса, который представляет собой сигнал скорости вращения правого ходового колеса, определенный посредством датчика 42 скорости вращения правого ходового колеса, установленного на управляемом колесе 2 (в дальнейшем в этом документе сокращенно называемый "скоростью Vwr вращения правого ходового колеса"), и сигнал Vwl скорости вращения левого ходового колеса, который представляет собой сигнал скорости вращения левого ходового колеса, определенный посредством датчика 43 скорости вращения левого ходового колеса, установленного на управляемом колесе 3 (в дальнейшем в этом документе сокращенно называемый "скоростью Vwl вращения левого ходового колеса"). Каждые из этих значений сигналов предоставляются для определения анормальностей в схеме 40 определения анормальностей.
Помимо этого, схема 40 определения анормальностей сравнивает среднее значение с каждым заданным значением, ранее сохраненным в энергонезависимом запоминающем устройстве ECU (не показано), и определяет присутствие или отсутствие анормальности в соответствии с результатом сравнения и выводит предварительно определенную команду в секцию 37 задания команд выдачи аварийных сигналов, секцию 38 прерывания подачи питания и секцию 32 вычисления вспомогательного тока.
[0027] В дальнейшем в этом документе подробно поясняется содержимое управления секции 36 определения коррозии на основе фиг. 5-14.
[0028] Фиг. 5 показывает блок-схему последовательности операций способа, представляющую последовательность операций управления секции 36 определения коррозии.
[0029] Другими словами, секция 36 определения коррозии сначала определяет то, вводится или нет 1 во флаг Flerr разрешения анормальности, а именно, определяет то, определена или нет уже анормальность при предыдущем процессе (этап S101). Если Flerr равен 1 (подача питания в электромотор 19 прерывается), последовательность операций по фиг. 5 завершается.
С другой стороны, если Flerr равен 0 (подача питания для электромотора 19 не прерывается), секция 36 определения коррозии считывает крутящий момент поворота при рулении из датчика 23 крутящего момента (этап S102), и после этого вычисляет среднее значение Trav крутящего момента поворота при рулении в качестве среднего значения нагрузки по рулению посредством процесса усреднения (подробные сведения описываются ниже) абсолютного значения крутящего момента Tr поворота при рулении (этап S103), и после этого считывает заданное значение Trrf крутящего момента поворота при рулении, ранее сохраненное в энергонезависимом запоминающем устройстве (этап S104). Следует отметить, что заданное значение Trrf крутящего момента поворота при рулении обозначает крутящий момент Tr поворота при рулении в нормальном состоянии и соответствует заданному значению в формуле изобретения.
[0030] Затем секция 36 определения коррозии определяет абсолютную величину среднего значения Trav крутящего момента поворота при рулении относительно значения для заданного значения Trrf крутящего момента поворота при рулении, умноженного на 1,2 (этап S105). В случае, если среднее значение Trav крутящего момента поворота при рулении меньше значения, умноженного на 1,2, умноженного на заданное значение Trrf крутящего момента поворота при рулении, а именно, если устанавливается взаимосвязь "Trav<1,2*Trrf", секция 36 определения коррозии определяет то, что анормальность не обнаружена, и последовательность операций управления завершается.
[0031] С другой стороны, если среднее значение Trav крутящего момента поворота при рулении равно или выше заданного значения Trrf крутящего момента поворота при рулении, умноженного на 1,2, а именно, не устанавливается взаимосвязь "Trav<1,2*Trrf", процедура переходит к этапу S106, на котором секция 36 определения коррозии определяет абсолютную величину среднего значения Trav крутящего момента поворота при рулении относительно заданного значения Trrf крутящего момента поворота при рулении, умноженного на 2,5.
[0032] Если среднее значение, Trav крутящего момента поворота при рулении меньше заданного значения Trrf крутящего момента поворота при рулении, умноженного на 2,5, а именно, если устанавливается взаимосвязь "Trav<2,5*Trrf", секция 36 определения коррозии определяет то, что присутствует анормальность, но степень анормальности является небольшой, и выполняет вывод индикаторов аварийных сигналов, который представляет собой команду загорания лампы аварийной сигнализации, для секции 37 задания команд выдачи аварийных сигналов. После этого последовательность операций по фиг. 5 завершается.
С другой стороны, если среднее значение Trav крутящего момента поворота при рулении равно или выше заданного значения Trrf крутящего момента поворота при рулении, умноженного на 2,5, а именно, если не устанавливается взаимосвязь "Trav<2,5*Trrf", секция 36 определения коррозии определяет то, что степень анормальности является большой, выполняет процесс прерывания работы системы для секции 38 прерывания подачи питания, который представляет собой команду прерывания подачи питания для электромотора 19 (этап S107), после этого выполняет вывод индикаторов аварийных сигналов (этап S108), и вводит 1 во флаг Flerr разрешения анормальности (этап S109). После этого последовательность операций управления по фиг. 5 завершается.
[0033] Фиг. 6 показывает блок-схему последовательности операций способа, представляющую подробные сведения по процессу усреднения, показанному на фиг. 5.
[0034] Другими словами, в процессе усреднения, секция 36 определения коррозии считывает крутящий момент Tr поворота при рулении (этап S201) и прибавляет сумму (Tr(2)+Tr(3)... Tr(n-1)) крутящих моментов поворота при рулении, ранее обработанных и накопленных в энергонезависимом запоминающем устройстве, к крутящему моменту Tr(1) поворота при рулении, считываемому на этапе S201, и делит это прибавленное значение на вычитаемое значение (A-1) в 1 из ранее сохраненного предварительно определенного значения A, для того чтобы вычислять среднее значение Trav крутящего момента поворота при рулении (этап 202). После этого, секция 36 определения коррозии подсчитывает значение Cnts счетчика предыдущих накоплений данных, представляющее число накоплений крутящего момента Tr поворота при рулении (этап S203).
[0035] Затем секция 36 определения коррозии определяет абсолютную величину между значением Cnts счетчика предыдущих накоплений данных и предварительно определенным значением A (соответствует предварительно определенному интервалу времени согласно настоящему изобретению) (этап S204). Если значение значения Cnts счетчика предыдущих накоплений данных равно или меньше предварительно определенного значения A, а именно, число раз, когда выполняется процесс этапа S203, не превышает предварительно определенное значение A (соответствует предварительно определенному интервалу времени в настоящем изобретении), так что не устанавливается взаимосвязь "Cnts>предварительно определенное значение A", значение Cnts счетчика предыдущих накоплений данных, подсчитанное на этапе S203, вводится в качестве n раз (этап S205). Затем крутящий момент Tr(1) поворота при рулении, считываемый на этапе S201, накапливается таким образом, что он плавно переходит к предыдущему значению Tr(2) (этап S206). После этого, последовательность операций управления по фиг. 6 завершается.
[0036] Здесь следует отметить, что, если на этапе S204 значение Cnts счетчика предыдущих накоплений данных превышает предварительно определенное значение A, а именно, процесс этапа S203 повторяется таким образом, что значение Cnts счетчика предыдущих накоплений данных превышает предварительно определенное значение A, и устанавливается взаимосвязь "Cnts>предварительно определенное значение A", сбрасывается значение Cnts счетчика предыдущих накоплений данных (этап S207), и последовательность операций управления по фиг. 6 завершается.
[0037] Поскольку в устройстве усилителя рулевого управления, которое имеет такую конструкцию, как описано выше, состояние, в котором среднее значение Trav крутящего момента поворота при рулении, введенное посредством существующей конструкции, превышает заданное значение Trrf крутящего момента поворота при рулении, задается как анормальность, и выполняется определение анормальностей. Таким образом, появляется возможность определять степень распространения коррозии, развивающейся на зубчатой рейке 8 и шариковинтовом механизме 27, на основе нагрузки по рулению устройства. Таким образом, без использования другого элемента, может определяться только требуемая анормальность.
[0038] Другими словами, даже если коррозия развивается на зубчатой рейке 8 и шариковинтовом механизме 27, серьезный дефект (неудобство), такой как застревание (или фиксация) зубчатой рейки 8 и шариковинтового механизма 27, не развивается сразу. Нагрузка по рулению увеличивается вследствие степени распространения коррозии, и в качестве конечной стадии, развивается серьезный дефект, такой как застревание.
Следовательно, поскольку определяется нагрузка по рулению, которая увеличивается вследствие степени распространения коррозии, может определяться только действительно опасная анормальность в устройстве.
[0039] Кроме того, в устройстве усилителя рулевого управления, когда анормальность определяется, выполняется процесс прерывания работы системы, описанный выше. Следовательно, вследствие ощущения при рулении руля 1, развитие анормальности может точно передаваться водителю. Таким образом, посредством сообщения в отношении необходимости технического обслуживания, к примеру, замены компонента, может заблаговременно исключаться серьезное неудобство вследствие распространения коррозии.
[0040] Помимо этого, в случае, если, в ходе процесса определения анормальностей, определенная анормальность является небольшой, вывод индикаторов аварийных сигналов выполняется в качестве предварительной стадии процесса прерывания работы системы. Таким образом, внимание привлекается до того, как анормальность развивается до серьезного неудобства, и может сообщаться необходимость технического обслуживания. Следовательно, водитель может справляться с анормальностью устройства до того, как увеличивается нагрузка по рулению, на основе процесса прерывания работы системы.
[0041] Кроме того, при определении анормальности, определение анормальности в некоторой степени основано на среднем значении (среднем значении Trav крутящего момента поворота при рулении) множества крутящих моментов Tr поворота при рулении за определенное число раз (предварительно определенный интервал времени), а не на мгновенном крутящем моменте Tr поворота при рулении. Например, в таком состоянии, в котором управляемые колеса 2, 3 движутся по обочине дороги, или в таком состоянии, в котором руль 1 ударяется (трясется) об объект, может подавляться ошибочное определение того, что крутящий момент Tr поворота при рулении мгновенно увеличивается не по причине посредством развития коррозии в качестве определения анормальности.
[0042] Помимо этого, когда выполнено определение с разделением на предварительно определенного числа раз (предварительно определенный интервал), значение Cnts счетчика предыдущих накоплений данных подсчитывается вместе с вычислением среднего значения Trav крутящего момента поворота при рулении, и когда значение счетчика становится больше предварительно определенного значения A, сбрасывается значение Cnts счетчика предыдущих накоплений данных, может предотвращаться сохранение определения анормальностей вследствие увеличения мгновенного крутящего момента Tr поворота при рулении, вызываемого не посредством развития коррозии, и может выполняться более надлежащее определение анормальностей.
[0043] Фиг. 7 показывает блок-схему последовательности операций способа, представляющую первую модификацию устройства усилителя рулевого управления согласно настоящему изобретению и представляющую содержимое управления по фиг. 5 с учетом угла поворота при рулении и скорости руления.
[0044] Другими словами, секция 36 определения коррозии в этой последовательности операций определяет то, вводится или нет 1 в Flerr, который представляет собой флаг разрешения анормальности (этап S301). Если Flerr равен 1, последовательность операций завершается. С другой стороны, если Flerr равен 0, процедура переходит к этапу S302, на котором считывается угол θang поворота при рулении из датчика 17 угла поворота при рулении. После этого, угловая скорость ω руления вычисляется посредством дифференцирования во времени этого угла θang поворота при рулении, либо угловая скорость ω руления считывается из датчика (не показан) (этап S303). Затем выполняется предварительно определенное определение на этапе S304.
[0045] На этапе S304, секция 36 определения коррозии определяет то, меньше или нет абсолютное значение угла θang поворота при рулении ранее сохраненного предварительно определенного значения B, либо определяет то, меньше или нет абсолютное значение скорости ω руления ранее сохраненного предварительно определенного значения D, а именно, устанавливается либо нет взаимосвязь "|θang|<предварительно определенное значение B" или "|ω|<предварительно определенное значение D". Если устанавливается взаимосвязь, последовательность операций завершается.
[0046] С другой стороны, в случае, если не устанавливается вышеописанная взаимосвязь, а именно, например, в случае, если руль 1 вращается в некоторой степени, и скорость ω руления развивается в некоторой степени, а именно, не устанавливается взаимосвязь "|θang|<предварительно определенное значение B или "|ω|<предварительно определенное значение D", секция 36 определения коррозии считывает крутящий момент Tr поворота при рулении (этап S305) и выполняет процесс усреднения для абсолютного значения крутящего момента Tr поворота при рулении, считываемого на этапе S305, для того чтобы вычислять среднее значение Trav крутящего момента поворота при рулении (этап S306). После этого, заданное значение Trrf крутящего момента поворота при рулении считывается (этап S307).
[0047] После этого, секция 36 определения коррозии определяет абсолютную величину между средним значением Trav крутящего момента поворота при рулении, вычисленным на этапе S306, и значением 1,2, умноженным на заданное значение Trrf крутящего момента поворота при рулении, считываемое на этапе S307 (этап S308). Если среднее значение Trav крутящего момента поворота при рулении меньше значения 1,2, умноженного на заданное значение Trrf крутящего момента поворота при рулении, а именно, если устанавливается взаимосвязь "Trav<1,2*Trrf", секция 36 определения коррозии определяет то, что анормальность не присутствует, и последовательность операций по фиг. 7 завершается. С другой стороны, если среднее значение Trav крутящего момента поворота при рулении равно или выше значения для заданного значения Trrf крутящего момента поворота при рулении, умноженного на 1,2, а именно, в случае, если не устанавливается взаимосвязь "Trav<1,2*Trrf", секция 36 определения коррозии определяет то, что присутствует анормальность, и выполняет предварительно определенное определение на этапе S309, как описано ниже.
[0048] На этапе S309, секция 36 определения коррозии определяет абсолютную величину между средним значением Trav крутящего момента поворота при рулении и значением 2,5, умноженным на заданное значение Trrf крутящего момента поворота при рулении. Затем если среднее значение Trav крутящего момента поворота при рулении меньше значения 2,5, умноженного на заданное значение Trrf крутящего момента поворота при рулении, а именно, в случае, если устанавливается взаимосвязь "Trav<2,5*Trrf", секция 36 определения коррозии определяет то, что присутствует анормальность, но степень анормальности является небольшой, и выполняет вывод индикатора аварийных сигналов (этап S313). После этого последовательность операций по фиг. 7 завершается.
С другой стороны, среднее значение Trav крутящего момента поворота при рулении равно или выше заданного значения Trrf крутящего момента поворота при рулении, умноженного на 2,5, а именно, если не устанавливается взаимосвязь "Trav<2,5*Trrf", определяется то, что степень анормальности является большой. Затем секция 36 определения коррозии выполняет процесс прерывания работы системы (этап S310), выполняет вывод индикаторов аварийных сигналов (этап S311), и в завершение, вводит 1 во флаг Flerr разрешения анормальности (этап S312). После этого последовательность операций завершается.
[0049] Согласно первой модификации с такой структурой, структуры этапов S302, S303 и S304 добавляются в последовательность операций управления по фиг. 5, а другие структуры являются идентичными. Таким образом, получаются работа и преимущество, идентичные работе и преимуществу по фиг. 5. В частности, в этой модификации, в случае, если устанавливается взаимосвязь "|θang|<предварительно определенное значение B" или "|ω|<предварительно определенное значение D", процесс управления завершается. Следовательно, такое состояние движения транспортного средства, в котором крутящий момент поворота при рулении почти не формируется, например, транспортное средство движется в состоянии движения по прямой, или транспортное средство движется в состоянии постоянного угла поворота при рулении, исключается из цели определения анормальностей. Другими словами, состояние, в котором руль 1 вращается в некоторой степени, и скорость ω руления формируется в некоторой степени, может представлять собой цель определения анормальностей. Следовательно, только состояние, в котором анормальность при рулении вследствие развития коррозии может восприниматься, может быть включено в цель определения анормальностей, и в силу этого может повышаться точность определения анормальностей.
[0050] Фиг. 8 показывает блок-схему последовательности операций способа, представляющую вторую модификацию устройства усилителя рулевого управления согласно настоящему изобретению и представляющую содержимое управления по фиг. 7 с добавлением определения удара (тряски).
[0051] Другими словами, секция 36 определения коррозии в этой последовательности операций определяет то, вводится или нет 1 во флаг Flerr разрешения анормальности (этап S401). Если Flerr равен 1, последовательность операций завершается. С другой стороны, если Flerr равен 0, угол θang поворота при рулении считывается (этап S402). Затем скорость ω руления вычисляется посредством дифференцирования этого угла θang поворота при рулении относительно времени или считывания скорости ω руления через датчик (не показан) (этап S403). После этого, предварительно определенное определение выполняется на этапе S404, как описано ниже.
[0052] На этапе S404, секция 36 определения коррозии определяет то, меньше или нет абсолютное значение угла θang поворота при рулении ранее сохраненного предварительно определенного значения B, либо меньше или нет абсолютное значение скорости ω руления ранее сохраненного предварительно определенного значения D. Другими словами, например, состояние движения по прямой транспортного средства или состояние поддержания руления транспортного средства определяется, устанавливается или нет взаимосвязь "|θang|<предварительно определенное значение A" или "|ω|<предварительно определенное значение D" (этап S404). Если устанавливается вышеописанная взаимосвязь ("Да"), последовательность операций завершается.
[0053] С другой стороны, если не устанавливается вышеописанная взаимосвязь, а именно, если не устанавливается взаимосвязь "|θang|<предварительно определенное значение B или |ω|<предварительно определенное значение D", секция 36 определения коррозии определяет абсолютную величину между абсолютным значением угла θang поворота при рулении и предварительно определенным значением R (этап S405).
[0054] На этапе S405, если абсолютное значение угла θang поворота при рулении превышает абсолютное значение R, указывающее близость удара (тряски) руля 1, а именно, устанавливается взаимосвязь "|θang|>предварительно определенное значение R", последовательность операций завершается. С другой стороны, если абсолютное значение угла θang поворота при рулении равно или меньше предварительно определенного значения R, а именно, не устанавливается взаимосвязь "|θang|>предварительно определенное значение R", секция 36 определения коррозии считывает крутящий момент Tr поворота при рулении (этап S406). Затем секция 36 определения коррозии выполняет процесс усреднения, описанный выше, для абсолютного значения крутящего момента поворота при рулении, считываемого на этапе S406, для того чтобы вычислять среднее значение Trav крутящего момента поворота при рулении (этап S407), и считывает заданное значение Trrf крутящего момента поворота при рулении (этап S408).
[0055] После этого, секция 36 определения коррозии определяет абсолютную величину между средним значением Trav крутящего момента поворота при рулении, вычисленным посредством этапа S407, и заданным значением Trrf крутящего момента поворота при рулении, считываемое на этапе S408 и умноженное на 1,2 (этап S409). Если среднее значение Trav крутящего момента поворота при рулении меньше 1,2, умноженного на заданное значение Trrf крутящего момента поворота при рулении, а именно, устанавливается взаимосвязь "Trav<1,2*Trrf", секция 36 определения коррозии определяет то, что не присутствует анормальность, и последовательность операций завершается. С другой стороны, если среднее значение Trav крутящего момента поворота при рулении равно или выше заданного значения Trrf крутящего момента поворота при рулении, умноженного на 1,2, а именно, в случае, если не устанавливается взаимосвязь "Trav<1,2*Trrf", секция 36 определения коррозии определяет то, что присутствует анормальность, и выполняет предварительно определенное определение на этапе S410.
[0056] На этапе S410, секция 36 определения коррозии определяет абсолютную величину между средним значением Trav крутящего момента поворота при рулении и 2,5, умноженным на заданное значение Trrf крутящего момента поворота при рулении (этап S410). Затем если среднее значение Trav крутящего момента поворота при рулении меньше, 2,5, умноженного на указываемый крутящий момент Trrf поворота при рулении, а именно, среднее значение Trav крутящего момента поворота при рулении меньше 2,5, умноженного на указываемое значение Trrf руления, а именно, в случае, если устанавливается взаимосвязь "Trav<2,5*Trrf", секция 36 определения коррозии определяет то, что присутствует анормальность, но степень анормальности является небольшой, выполняет вывод индикаторов аварийных сигналов (этап S414), и после этого последовательность операций завершается.
С другой стороны, в случае, если среднее значение Trav крутящего момента поворота при рулении равно или выше 2,5, умноженного на заданное значение Trrf крутящего момента поворота при рулении, а именно, если не устанавливается взаимосвязь "Trav<2,5*Trrf", секция 36 определения коррозии выполняет процесс прерывания работы системы (этап S411), выполняет вывод индикаторов аварийных сигналов (этап S412), и в завершение, 1 вводится во флаг Flerr разрешения анормальности (этап S413). После этого последовательность операций завершается.
[0057] Согласно второй модификации, описанной выше, этап S405 добавляется в первую модификацию. Другие структуры являются идентичными структурам по первой модификации. Получаются работа и преимущества, идентичные работе и преимущества по первой модификации. В частности, при определении на этапе S405, в случае, если устанавливается взаимосвязь "|θang|>предварительно определенное значение R", последовательность операций завершается.
Следовательно, если предварительно определенное значение R, например, задано как позиция около удара (тряски) руля 1. Случай, в котором крутящий момент поворота при рулении увеличивается вследствие удара (тряски) руля, а не вследствие развития коррозии, может исключаться из определения анормальностей. Следовательно, может достигаться дальнейшее повышение точности определения анормальностей.
[0058] Фиг. 9 показывает блок-схему последовательности операций способа, представляющую третью модификацию устройства усилителя рулевого управления согласно настоящему изобретению и представляющую содержимое управления по фиг. 5 с учетом угла поворота при рулении и скорости относительно вертикальной оси.
[0059] Другими словами, секция 36 определения коррозии в этой последовательности операций определяет то, вводится или нет 1 во флаг Flerr разрешения анормальности (этап S501). Если Flerr указывает 1, последовательность операций завершается. С другой стороны, если Flerr равен 0, угол θang поворота при рулении считывается (этап S502), и скорость Yw относительно вертикальной оси считывается из датчика 41 скорости относительно вертикальной оси (этап S503).
[0060] Затем если абсолютное значение угла θang поворота при рулении меньше ранее сохраненного предварительно определенного значения B, или абсолютное значение скорости Yw относительно вертикальной оси меньше ранее сохраненного предварительно определенного значения J, а именно, состояние движения транспортного средства соответствует, например, состоянию движения по прямой транспортного средства, состоянию увода, в котором шины не сцепляются с поверхностью дороги, так что секция 36 определения коррозии определяет то, устанавливается или нет взаимосвязь "|θang|<предварительно определенный угол B или |Yw|<предварительно определенное значение J" (этап S504). Если устанавливается вышеописанная взаимосвязь, секция 36 определения коррозии определяет то, что не присутствует анормальность, и последовательность операций завершается. С другой стороны, в случае, если не устанавливается вышеописанная взаимосвязь, секция 36 определения коррозии считывает крутящий момент Tr поворота при рулении (этап S505), вычисляет среднее значение Trav крутящего момента поворота при рулении посредством выполнения процесса усреднения для абсолютного значения считываемого крутящего момента Tr поворота при рулении (этап S506), и после этого считывает заданное значение Trrf крутящего момента поворота при рулении (этап S507).
[0061] Затем секция 36 определения коррозии определяет абсолютную величину между средним значением Trav крутящего момента поворота при рулении, вычисленным на этапе S506, и 1,2, умноженным на заданное значение Trrf крутящего момента поворота при рулении, считываемое на этапе S507 (этап S508). Если среднее значение Trav крутящего момента поворота при рулении меньше 1,2, умноженного на заданное значение Trrf крутящего момента поворота при рулении, а именно, в случае, если устанавливается взаимосвязь "Trav<1,2*Trrf", секция 36 определения коррозии определяет то, что не присутствует анормальность, и последовательность операций завершается.
С другой стороны, в случае, если среднее значение Trav крутящего момента поворота при рулении равно или выше 1,2, умноженного на заданное значение Trrf крутящего момента поворота при рулении, а именно, не устанавливается взаимосвязь "Trav<1,2*Trrf", секция 36 определения коррозии определяет абсолютную величину между средним значением Trav крутящего момента поворота при рулении и заданным значением Trrf крутящего момента поворота при рулении, умноженным на 2,5 (этап S509).
[0062] Кроме того, в случае, если среднее значение Trav крутящего момента поворота при рулении меньше 2,5, умноженного на заданное значение Trrf крутящего момента поворота при рулении, а именно, в случае, если устанавливается взаимосвязь "Trav<2,5*Trrf", секция 36 определения коррозии определяет то, что присутствует анормальность, но степень анормальности является небольшой, и выполняет вывод индикаторов аварийных сигналов (этап S513). После этого последовательность операций завершается. С другой стороны, в случае, если среднее значение Trav крутящего момента поворота при рулении равно или выше 2,5, умноженного на заданное значение Trrf крутящего момента поворота при рулении, а именно, в случае, если не устанавливается взаимосвязь "Trav<2,5*Trrf", секция 36 определения коррозии определяет то, что степень анормальности является большой, выполняет вывод индикаторов аварийных сигналов (этап S511), и в завершение, вводит 1 во флаг Flerr разрешения анормальности (этап S512). После этого последовательность операций завершается.
[0063] Согласно третьей модификации, этапы S502-S504 добавляются в первый предпочтительный вариант осуществления. Другие структуры являются идентичными первому предпочтительному варианту осуществления. Таким образом, получаются работа и преимущество, идентичные работе и преимуществу по первому предпочтительному варианту осуществления. В частности, в этой модификации, секция 36 определения коррозии определяет то, устанавливается или нет взаимосвязь "|θang|<предварительно определенное значение B" или "|Yw|<предварительно определенное значение J", и если устанавливается эта взаимосвязь, процесс завершается. Следовательно, состояние, в котором движется транспортное средство, представляет собой движение по прямой, и увеличение крутящего момента поворота при рулении в специальном состоянии движения, к примеру, в состоянии увода, в котором шины не сцепляются с поверхностью дороги, может исключаться из цели определения анормальностей. Может достигаться дальнейшее повышение точности определения анормальностей.
[0064] Фиг. 10 показывает блок-схему последовательности операций способа, представляющую четвертую модификацию устройство усилителя рулевого управления согласно настоящему изобретению и представляющую содержимое управления по фиг. 5 с учетом скоростей вращения ходовых колес.
[0065] Другими словами, секция 36 определения коррозии определяет то, вводится или нет 1 во флаг Flerr разрешения анормальности (этап S601). Если Flerr равен 1, последовательность операций завершается. С другой стороны, если Flerr равен 0, секция 36 определения коррозии считывает скорость Vwr вращения правого ходового колеса из датчика 42 скорости вращения правого ходового колеса и считывает скорость Vwl вращения левого ходового колеса из датчика 43 скорости вращения левого ходового колеса (этап S602) и вычитает скорость Vwl вращения левого ходового колеса из скорости Vwr вращения правого ходового колеса, для того чтобы вычислять разность Vwθ между скоростью вращения левого и правого передних ходовых колес (этап S603).
[0066] Затем секция 36 определения коррозии определяет то, меньше или нет абсолютное значение разности Vwθ между скоростью вращения левого и правого передних ходовых колес ранее сохраненного предварительно определенного значения K, а именно, устанавливается или нет взаимосвязь "|Vwθ|<предварительно определенное значение K" (этап S604). Если устанавливается эта взаимосвязь, секция 36 определения коррозии определяет то, что не присутствует анормальность, и последовательность операций завершается.
[0067] С другой стороны, если не устанавливается вышеописанная взаимосвязь, секция 36 определения коррозии считывает крутящий момент Tr поворота при рулении (этап S605), выполняет процесс усреднения для абсолютного значения крутящего момента Tr поворота при рулении, для того чтобы вычислять среднее значение Trav крутящего момента поворота при рулении (этап S606), и после этого считывает заданное значение Trrf крутящего момента поворота при рулении (этап S607).
[0068] Затем секция 36 определения коррозии определяет абсолютную величину между средним значением Trav крутящего момента поворота при рулении, вычисленным на этапе S606, и 1,2, умноженным на заданное значение Trrf крутящего момента поворота при рулении (этап S608). Затем если среднее значение Trav крутящего момента поворота при рулении меньше 1,2, умноженного на заданное значение Trrf крутящего момента поворота при рулении, а именно, если устанавливается взаимосвязь "Trav<1,2*Trrf", секция 36 определения коррозии определяет то, что анормальность не присутствует, и последовательность операций завершается. С другой стороны, если среднее значение Trav крутящего момента поворота при рулении равно или выше значения 1,2, умноженного на заданное значение Trrf крутящего момента поворота при рулении, а именно, если не устанавливается взаимосвязь "Trav<1,2*Trrf", секция 36 определения коррозии определяет абсолютную величину между средним значением Trav крутящего момента поворота при рулении и 2,5, умноженным на заданное значение Trrf крутящего момента поворота при рулении (этап S609).
[0069] На этапе S609, если среднее значение Trav крутящего момента поворота при рулении меньше 2,5, умноженного на заданное значение Trrf крутящего момента поворота при рулении, а именно, если устанавливается взаимосвязь "Trav<2,5*Trrf", секция 36 определения коррозии определяет то, что, хотя присутствует анормальность, степень анормальности является небольшой. Затем после того, как секция 36 определения коррозии выполняет вывод индикаторов аварийных сигналов (этап S613), последовательность операций завершается. С другой стороны, в случае, если среднее значение Trav крутящего момента поворота при рулении равно или выше 2,5, умноженного на заданное значение Trrf крутящего момента поворота при рулении, а именно, если не устанавливается взаимосвязь "Trav<2,5*Trrf", секция 36 определения коррозии определяет то, что степень анормальности является большой, выполняет процесс прерывания работы системы (этап S610), выполняет вывод индикаторов аварийных сигналов (этап S611), и в завершение, 1 вводится во флаг Flerr разрешения анормальности (этап S612), и эта последовательность операций завершается.
[0070] Согласно четвертой модификации со структурой, описанной выше, этапы S602-S604 добавляются в первый предпочтительный вариант осуществления. При этом другая структура является идентичной первому варианту осуществления. Таким образом, могут получаться работа и преимущество, идентичные работе и преимуществу по первому варианту осуществления. В частности, в этой модификации, вместо считывания угла θang поворота при рулении, вычисляется разность Vwθ между скоростью вращения левого и правого передних ходовых колес из скоростей Vwr, Vwl вращения левого и правого ходовых колес, и если устанавливается взаимосвязь "Vwθ<предварительно определенное значение K", процесс завершается. Таким образом, состояние движения, которое соответствует состоянию движения по прямой, может исключаться из цели определения анормальностей. Следует отметить, что посредством комбинации угловой скорости руления в качестве первой модификации, так называемое состояние поддержания постоянного угла поворота при рулении может исключаться из цели определения анормальностей. Помимо этого, комбинация скорости Yw относительно вертикальной оси в качестве третьей модификации, состояние увода может исключаться из цели определения анормальностей.
[0071] Фиг. 11 показывает блок-схему последовательности операций способа, представляющую пятую модификацию устройства усилителя рулевого управления согласно настоящему изобретению и представляющую содержимое управления по фиг. 5 с учетом среднего значения непосредственно перед тем, как переключатель зажигания выключается в предшествующее время.
[0072] Другими словами, секция 36 определения коррозии определяет то, представляет оно собой или нет первое прошедшее время, когда переключатель зажигания включается (этап S701). В случае, если оно не представляет собой первое прошедшее время, а именно, в случае, если процесс последовательности операций на фиг. 11 выполнен один раз или более с момента, когда включается переключатель зажигания, секция 36 определения коррозии определяет то, вводится или нет 1 во флаг Flerr разрешения анормальности (этап S702). Если 1 вводится во флаг Flerr разрешения анормальности, процедура переходит к этапу S712, как описано ниже.
[0073] С другой стороны, в случае, если оно представляет собой первое прошедшее время на этапе S701, а именно, процесс последовательности операций по фиг. 11 более не выполняется с момента, когда переключатель зажигания включается, секция 36 определения коррозии считывает среднее значение Trav крутящего момента поворота при рулении непосредственно перед тем, как предыдущий переключатель зажигания выключается, и сохраняется в запоминающем устройстве на этапе S716 (который описывается ниже) (этап S713), и задает значение Tr(n) в непосредственно предшествующее время, как описано ниже, в качестве начального значения (этап S714), и после этого процедура переходит к этапу S702.
[0074] В случае, если Flerr определяется равным 0 на этапе S702, секция 36 определения коррозии считывает крутящий момент Tr поворота при рулении (этап S703), выполняет процесс усреднения для абсолютного значения считываемого крутящего момента Tr поворота при рулении, для того чтобы вычислять среднее значение Trav крутящего момента поворота при рулении (этап S704), и после этого считывает заданное значение Trrf крутящего момента поворота при рулении (этап S705).
[0075] Затем секция 36 определения коррозии определяет абсолютную величину между средним значением Trav крутящего момента поворота при рулении, вычисленным на этапе S704, и значением 1,2, умноженным на заданное значение Trrf крутящего момента поворота при рулении, считываемое на этапе S705 (этап S706). Если среднее значение Trav крутящего момента поворота при рулении меньше 1,2, умноженного на заданное значение Trrf крутящего момента поворота при рулении, а именно, если устанавливается взаимосвязь "Trav<1,2*Trrf", процедура переходит к этапу S712, как описано ниже.
[0076] С другой стороны, в случае, если среднее значение Trav крутящего момента поворота при рулении равно или выше 1,2, умноженного на заданное значение Trrf крутящего момента поворота при рулении, а именно, если не устанавливается взаимосвязь "Trav<1,2*Trrf", секция 36 определения коррозии определяет то, что присутствует анормальность, и после этого определяет абсолютную величину между средним значением Trav крутящего момента поворота при рулении и определяет абсолютную величину между средним значением Trav крутящего момента поворота при рулении и значением 2,5, умноженным на заданное значение Trrf крутящего момента поворота при рулении (этап S707).
[0077] Затем в случае, если определяется то, что среднее значение Trav крутящего момента поворота при рулении меньше 2,5, умноженного на заданное значение Trrf крутящего момента поворота при рулении, а именно, в случае, если устанавливается взаимосвязь "Trav<2,5*Trrf", анормальность присутствует, но степень анормальности является небольшой. Затем секция 36 определения коррозии выполняет вывод индикаторов аварийных сигналов (этап S711), и процедура переходит к этапу S712, как описано ниже.
[0078] С другой стороны, в случае, если, на этапе S707, среднее значение Trav крутящего момента поворота при рулении равно или выше значения 2,5, умноженного на заданное значение Trrf крутящего момента поворота при рулении, а именно, если не устанавливается взаимосвязь "Trav<2,5*Trrf", секция 36 определения коррозии определяет то, что степень анормальности является большой, после этого выполняет процесс прерывания работы системы (этап S708), и после этого вывод индикаторов аварийных сигналов выполняется (этап S709), 1 вводится во флаг Flerr разрешения анормальности (этап S710). После этого, на этапе S712, секция 36 определения коррозии определяет то, выключен или нет переключатель IGN зажигания (этап S712).
[0079] Затем если переключатель IGN зажигания выключается ("Да") на этапе S712, секция 36 определения коррозии начинает самоблокировку подачи питания в микрокомпьютер (этап S715) и сохраняет среднее значение Trav крутящего момента поворота при рулении в энергонезависимом запоминающем устройстве (этап S716), и в завершение, подача питания в микрокомпьютер прекращается (этап S717). Затем настоящая последовательность операций завершается.
С другой стороны, в случае, если секция 36 определения коррозии определяет то, что переключатель IGN зажигания не выключен на этапе S712, последовательность операций немедленно завершается.
[0080] Фиг. 12 показывает блок-схему последовательности операций способа, представляющую подробные сведения по процессу усреднения, показанному на фиг. 11.
[0081] Другими словами, секция 36 определения коррозии в этой последовательности операций определяет то, является или нет настоящая процедура первым периодом времени во время включенного переключателя зажигания (этап S801). Если секция 36 определения коррозии определяет то, что оно не представляет собой первое прошедшее время, секция 36 определения коррозии считывает крутящий момент Tr поворота при рулении (этап S802).
[0082] С другой стороны, в случае первого периода времени ("Да" на этапе S801), секция 36 определения коррозии считывает среднее значение Trav крутящего момента поворота при рулении непосредственно перед предыдущим выключением зажигания, сохраненное в энергонезависимом запоминающем устройстве (этап S808), и задает равным непосредственно предшествующему значению Tr(n) в качестве начального значения (этап S809). После этого, процедура переходит к этапу S802.
[0083] Сумма среднего значения Trav крутящего момента поворота при рулении (в случае первого периода времени) непосредственно перед предыдущим выключением переключателя зажигания, считываемого на этапе S808, или среднего значения Trav крутящего момента поворота при рулении, вычисленного при процессе в предыдущий период времени, с крутящим моментом поворота при рулении после включения переключателя зажигания (Tr(1)+Tr(2)+Tr(3)+...Tr(n-1)), делится на ранее сохраненное предварительно определенное значение A, для того чтобы вычислять среднее значение Trav крутящего момента поворота при рулении (этап S803). После этого, подсчитывается значение Cnts счетчика предыдущих накоплений данных, указывающее число накоплений крутящего момента Tr поворота при рулении (этап S804).
[0084] Затем секция 36 определения коррозии определяет абсолютную величину между значением Cnts счетчика предыдущих накоплений данных, полученным при вышеописанном этапе S803, и предварительно определенным значением A (этап S805). Если значение Cnts счетчика предыдущих накоплений превышает предварительно определенное значение A ("Да"), а именно, процесс на этапе S804 повторяется, и значение Cnts счетчика предыдущих накоплений данных превышает предварительно определенное значение, так что устанавливается взаимосвязь "Cnts>предварительно определенное значение". В этом случае, после того, как сбрасывается значение Cnts счетчика предыдущих накоплений данных (этап S810), последовательность операций завершается.
[0085] С другой стороны, в случае, если значение Cnts счетчика предыдущих накоплений данных равно или меньше предварительно определенного значения A, а именно, в случае, если число раз, которое процесс на этапе S804 выполняется, не выше предварительно определенного значения A (предварительно определенного интервала времени), так что не устанавливается взаимосвязь "Cnts>предварительно определенное значение A", значение Cnts счетчика предыдущих накоплений данных, подсчитанное на этапе S804, вводится в качестве n-ого числа раз (этап S806), крутящий момент Tr поворота при рулении, считываемый на этапе S802, накапливается как предыдущее значение Tr(2) (этап S807), и после этого последовательность операций завершается.
[0086] Согласно пятой модификации со структурой, описанной выше, структуры этапов S712-S717 добавляются в первый предпочтительный вариант осуществления. Другие структуры являются идентичными первому предпочтительному варианту осуществления. Таким образом, могут получаться работа и преимущества, идентичные работе и преимуществам по первому предпочтительному варианту осуществления. В частности, в пятой модификации, поскольку среднее значение Trav крутящего момента поворота при рулении непосредственно перед тем, как прекращается подача питания в микрокомпьютер посредством выключения переключателя зажигания, сохраняется в энергонезависимом запоминающем устройстве, может использоваться информация среднего значения Trav крутящего момента поворота при рулении перед тем, как переключатель зажигания выключается, при последующем включении переключателя зажигания. Например, в случае, если транспортное средство оставляется неиспользуемым в течение постоянного интервала времени, так что коррозия распространяется, определение анормальности вследствие коррозии может выполняться на ранней стадии. Следовательно, может достигаться дальнейшее повышение точности определения анормальностей.
[0087] Фиг. 13 показывает блок-схему последовательности операций способа, представляющую шестую модификацию устройства усилителя рулевого управления согласно настоящему изобретению и представляющую добавление взвешивания в процесс усреднения на этапе S803 по фиг. 12.
[0088] Другими словами, секция 36 определения коррозии в этой последовательности операций определяет то, соответствует или нет это случаю первого периода времени во время включения переключателя зажигания (этап S901). Если секция 36 определения коррозии определяет то, что оно не представляет собой первое прошедшее время, секция 36 определения коррозии считывает крутящий момент Tr поворота при рулении (этап S902).
[0089] С другой стороны, в случае, если это соответствует первому периоду времени ("Да" на этапе S901), секция 36 определения коррозии считывает среднее значение Trav крутящего момента поворота при рулении непосредственно перед предыдущим выключением (переключателя) зажигания, сохраненное в энергонезависимом запоминающем устройстве (этап S908). Затем при этом считываемом значении в качестве начального значения, секция 36 определения коррозии задает начальное значение равным непосредственно предыдущему значению Tr(n) крутящего момента поворота при рулении (этап S909), и процедура переходит к этапу S902.
[0090] Затем сумма значения весового коэффициента K1, умноженного на среднее значение Trav крутящего момента поворота при рулении (в случае первого периода времени) непосредственно перед предыдущим выключением (переключателя) зажигания, считываемое на этапе S908, или среднего значения Trav крутящего момента поворота при рулении, вычисленного при процессе в первом периоде времени, и значения другого весового коэффициента K2, умноженного на сумму крутящего момента поворота при рулении после того, как включается переключатель зажигания (Tr(1)+Tr(2)+Tr(3)... Tr(n-1)), делится на значение суммы весовых коэффициентов K1+K2, умноженное на ранее сохраненное предварительно определенное значение A, для того чтобы вычислять среднее значение Trav крутящего момента поворота при рулении (этап S903). После этого, подсчитывается значение Cnts счетчика предыдущих накоплений данных, представляющее число накоплений крутящего момента Tr поворота при рулении (этап S904).
[0091] Затем, секция 36 определения коррозии определяет абсолютную величину между значением Cnts счетчика предыдущих накоплений данных, полученным на этапе S904, и предварительно определенным значением A (этап S905). Если значение Cnts счетчика предыдущих накоплений данных превышает предварительно определенное значение A, а именно, в случае, если процесс этапа S904 повторяется в течение предварительно определенного интервала времени, значение Cnts счетчика предыдущих накоплений данных выше предварительно определенного значения, и устанавливается взаимосвязь "Cnts>предварительно определенное значение A", сбрасывается значение Cnts счетчика предыдущих накоплений данных (этап S910), и после этого последовательность операций завершается.
[0092] С другой стороны, в случае, если значение Cnts счетчика предыдущих накоплений данных равно или меньше предварительно определенного значения A, а именно, в случае, если число раз, когда выполняется процесс этапа S904, не выше предварительно определенного значения A (предварительно определенного интервала времени), и не устанавливается взаимосвязь "Cnts>предварительно определенное значение A", значение Cnts счетчика предыдущих накоплений данных, подсчитанное на этапе S904, вводится в качестве n-ого числа раз (этап S906), крутящий момент Tr поворота при рулении, считываемый на этапе S902, накапливается как предыдущее значение Tr(2) (этап S907), и после этого последовательность операций завершается.
[0093] Согласно шестой модификации со структурой, описанной выше, взвешивание выполняется для средних значений Trav крутящего момента поворота при рулении непосредственно перед предыдущим выключением (переключателя) зажигания и после выключения (переключателя) зажигания, так что может эффективно использоваться среднее значение Trav крутящего момента поворота при рулении непосредственно перед предыдущим выключением (переключателя) зажигания, дискретизированное в течение длительного времени. Таким образом, может вычисляться более точное среднее значение Trav крутящего момента поворота при рулении.
[0094] Фиг. 14 показывает блок-схему последовательности операций способа, представляющую седьмую модификацию устройства усилителя рулевого управления согласно настоящему изобретению и представляющую содержимое управления по фиг. 5, в который добавляется процесс постепенно уменьшающегося командного тока TRr электромотора.
[0095] Другими словами, секция 36 определения коррозии в этой последовательности операций определяет то, вводится или нет 1 во флаг Flerr разрешения анормальности (этап S1001). Если Flerr равен 1, последовательность операций завершается. С другой стороны, если Flerr равен 0, секция 36 определения коррозии считывает крутящий момент Tr поворота при рулении (этап S1002) и выполняет процесс усреднения, как описано со ссылкой на фиг. 6, для абсолютного значения считываемого крутящего момента Tr поворота при рулении, для того чтобы вычислять среднее значение Trav крутящего момента поворота при рулении (этап S1003), и после этого считывает заданное значение Trrf крутящего момента поворота при рулении (этап S1004).
[0096] Затем секция 36 определения коррозии определяет абсолютную величину между средним значением Trav крутящего момента поворота при рулении, вычисленным на этапе S1003, и 1,2, умноженным на заданное значение Trrf крутящего момента поворота при рулении, считываемое на этапе S1004 (этап S1005). В случае, если среднее значение Trav крутящего момента поворота при рулении равно или выше 1,2, умноженного на заданное значение Trrf крутящего момента поворота при рулении, а именно, в случае, если не устанавливается взаимосвязь "Trav<1,2*Trrf", секция 36 определения коррозии определяет то, что присутствует анормальность, и после этого определяет абсолютную величину между средним значением Trav крутящего момента поворота при рулении и 2,5, умноженным на заданное значение Trrf крутящего момента поворота при рулении (этап S1006).
[0097] В случае, если среднее значение Trav крутящего момента поворота при рулении равно или выше 2,5, умноженного на заданное значение Trrf крутящего момента поворота при рулении, а именно, в случае, если не устанавливается взаимосвязь "Trav<2,5*Trrf, секция 36 определения коррозии определяет то, что степень анормальности является большой, выполняет процесс прерывания работы системы (этап S1007), и выполняет вывод индикаторов аварийных сигналов (этап S1008). Затем в завершение, секция 36 определения коррозии вводит 1 во флаг Flerr разрешения анормальности (этап S1009), и последовательность операций завершается.
[0098] С другой стороны, на этапе S1006, в случае, если секция 36 определения коррозии определяет то, что среднее значение Trav крутящего момента поворота при рулении меньше 2,5, умноженного на заданное значение Trrf крутящего момента поворота при рулении, а именно, в случае, если устанавливается взаимосвязь "Trav<2,5*Trrf", секция 36 определения коррозии определяет то, что присутствует анормальность, но степень анормальности является небольшой, выполняет вывод индикаторов аварийных сигналов (этап S1010) и выполняет процесс постепенного уменьшения командного тока TRr электромотора (этап S1011). После этого последовательность операций завершается.
[0099] Помимо этого, на этапе S1005, в случае, если секция 36 определения коррозии определяет то, что среднее значение Trav крутящего момента поворота при рулении меньше 1,2, умноженного на заданное значение Trrf крутящего момента поворота при рулении, а именно, в случае, если устанавливается взаимосвязь "Trav<1,2*Trrf", секция 36 определения коррозии определяет то, что анормальность не присутствует, или анормальность исключается, и выполняет процесс постепенного увеличения командного тока TRr электромотора (этап S1012). После этого последовательность операций завершается.
[0100] Согласно седьмой модификации, как описано выше, структуры этапов S1011 и S1012 добавляются в первый предпочтительный вариант осуществления. Другие структуры являются идентичными первому предпочтительному варианту осуществления.
Таким образом, могут достигаться работа и преимущество, идентичные работе и преимуществу по первому предпочтительному варианту осуществления. В частности, в этой модификации, когда секция 36 определения коррозии определяет то, что присутствует анормальность, но степень анормальности является небольшой, командный ток TRr электромотора подвергается процессу постепенного уменьшения. Таким образом, анормальность может сообщаться водителю без приложения резкой нагрузки для водителя, как и в случае процесса прерывания работы системы.
[0101] Помимо этого, в этой модификации, командный ток TRr электромотора подвергается процессу постепенного уменьшения в соответствии со средним значением Trav крутящего момента поворота при рулении. Таким образом, по сравнению, например, со случаем, в котором командный ток TRr электромотора подвергается процессу постепенного уменьшения в соответствии со временем, сможет предотвращаться резкое увеличение нагрузки по рулению на водителя до и после состояния движения по прямой. Следует отметить, что, вместо процесса постепенного уменьшения командного тока TRr электромотора, верхнее предельное значение крутящего момента электромотора может подвергаться процессу постепенного уменьшения от заданного верхнего предельного значения.
[0102] Как описано выше, в первом предпочтительном варианте осуществления и в соответствующих модификациях, связанных с первым предпочтительным вариантом осуществления, вычисляется среднее значение Trav крутящего момента поворота при рулении, и анормальность определяется посредством сравнения среднего значения Trav крутящего момента поворота при рулении и заданного значения Trrf крутящего момента поворота при рулении. Тем не менее, параметры определения анормальностей могут надлежащим образом свободно задаваться в соответствии с техническими требованиями устройства. Помимо этого, вместо крутящего момента Tr поворота при рулении, может использоваться командный ток TRr электромотора или фактический ток Ir электромотора. В этом случае, вместо среднего значения Trav крутящего момента поворота при рулении, используется среднее значение командного тока TRr электромотора или фактического тока Ir электромотора.
Второй вариант осуществления
Фиг. 15 является блок-схемой управления, представляющей подробные сведения, связанные со вторым предпочтительным вариантом осуществления, из числа управляющей структуры модуля 18 управления (ECU), показанного на фиг. 1.
[0103] В этом модуле 18 управления, секция 50 определения коррозии состоит только из схемы 51 определения анормальностей. В этой схеме 51 определения анормальностей, командный ток TRr электромотора и фактический ток Ir электромотора вводятся в схему 51 определения анормальностей. Этот аспект отличается от первого предпочтительного варианта осуществления. Когда эти значения (соответствующее значение нагрузки по рулению) сравниваются с заданным значением, и частота, с которой соответствующее значение нагрузки по рулению превышает заданное значение, превышает предварительно определенное значение, определяется анормальность устройства. Помимо этого, схема 51 определения анормальностей выводит сигнал Ts управления крутящим моментом, который ограничивает верхнее предельное значение крутящего момента электромотора 19 при предварительно определенном условии, в секцию 33 управления электромотором.
[0104] В дальнейшем в этом документе подробно поясняется содержимое управления секции 50 определения коррозии на основе фиг. 16-21.
[0105] Фиг. 16 показывает блок-схему последовательности операций способа, представляющую содержимое процесса определения анормальности посредством вычисления частоты анормальности вместо процесса усреднения из содержимого управления по фиг. 5.
[0106] Другими словами, секция 50 определения коррозии в этой последовательности операций определяет то, вводится или нет 1 во флаг Flerr разрешения анормальности (этап S1101).
Если Flerr равен 1, последовательность операций завершается. С другой стороны, если Flerr равен 0, секция 50 определения коррозии считывает крутящий момент Tr поворота при рулении (этап S1102). Затем секция 50 определения коррозии считывает значение Terr крутящего момента поворота при рулении при анормальности, ранее сохраненное в качестве заданного значения, которое предоставляет критерий определения анормальностей (этап S1103). После этого, секция 50 определения коррозии подсчитывает значение Tnts счетчика таймера, которое служит в качестве подтверждения частоты возникновения анормальности, в течение предварительно определенного числа дискретизаций (соответствует предварительно определенному интервалу времени в настоящем изобретении) (1 прибавляется к значению Tnts счетчика таймера) (этап S1104).
[0107] Затем, секция 50 определения коррозии определяет абсолютную величину между значением Tnts счетчика таймера, полученным на этапе S1104, и ранее сохраненным предварительно определенным значением E (этап S1105). В случае, если значение Tnts счетчика таймера меньше предварительно определенного значения E, а именно, в случае, если устанавливается взаимосвязь "Tnts<предварительно определенное значение E", секция 50 определения коррозии определяет абсолютную величину между крутящим моментом Tr поворота при рулении, считываемым на этапе S1102, и ранее сохраненным значением Terr крутящего момента поворота при рулении при анормальности (этап S1106).
[0108] Следует отметить, что в случае, если крутящий момент Tr поворота при рулении равен или выше значения Terr крутящего момента поворота при рулении при анормальности, а именно, в случае, если не устанавливается взаимосвязь "Tr [0109] Помимо этого, на этапе S1105, в случае, если значение Tnts счетчика таймера равно или выше предварительно определенного значения E, а именно, в случае, если предварительно определенное число дискретизаций E достигнуто, и не устанавливается взаимосвязь "Tnts<предварительно определенное значение E", сбрасывается значение Cerr счетчика анормальностей (этап S1112), и сбрасывается значение Tnts счетчика таймера (этап S1113). После этого последовательность операций завершается. [0110] Затем на этапе S1107, в случае, если значение Cerr счетчика анормальностей равно или меньше предварительно определенного значения H, а именно, в случае, если не устанавливается взаимосвязь "Cerr>предварительно определенное значение H", секция 50 определения коррозии определяет то, что не присутствует анормальность, и последовательность операций завершается. С другой стороны, в случае, если значение Cerr счетчика анормальностей превышает предварительно определенное значение H, а именно, в случае, если устанавливается взаимосвязь "Cerr>предварительно определенное значение H", секция 50 определения коррозии определяет то, что присутствует анормальность. Затем секция 50 определения коррозии вводит 1 во флаг Flerr разрешения анормальности (этап S1108), выполняет процесс прерывания работы системы (этап S1109), и выполняет вывод индикаторов аварийных сигналов (этап S1110). После этого последовательность операций завершается. [0111] Согласно второму предпочтительному варианту осуществления, описанному выше, когда частота, с которой крутящий момент Tr поворота при рулении в качестве соответствующего значения нагрузки по рулению превышает значение Terr крутящего момента поворота при рулении при анормальности в качестве заданного значения, превышает предварительно определенное значение H, определяется анормальность. Аналогично первому предпочтительному варианту осуществления, другие элементы не требуются, и только анормальность может определяться. [0112] Помимо этого, во втором предпочтительном варианте осуществления, присутствие или отсутствие анормальности устройства определяется согласно частоте возникновения анормальности вместо среднего значения Trav крутящего момента поворота при рулении. Следовательно, даже в случае, если такая ситуация, что крутящий момент Tr поворота при рулении мгновенно увеличен не вследствие развития коррозии, а вследствие такого состояния движения, при котором руль 1 ударяется (трясется) о стенку, или шины наезжают на бордюрный камень, влияние выполнения определения анормальностей является небольшим по сравнению с первым предпочтительным вариантом осуществления, и может достигаться более высокоточное определение анормальностей. [0113] Кроме того, когда значение Tnts счетчика таймера достигает предварительно определенного числа дискретизаций (предварительно определенного значения E), сбрасывается значение Cerr счетчика анормальностей, и после этого сбрасывается значение Tnts счетчика таймера. Кроме того, уменьшается влияние кумулятивного увеличения крутящего момента Tr поворота при рулении, сформированного вследствие состояния движения, не вызываемого посредством развития коррозии. [0114] Фиг. 17 показывает блок-схему последовательности операций способа, представляющую первую модификацию второго предпочтительного варианта осуществления и представляющую добавление процесса в соответствии со значением частоты возникновения анормальности в управление по фиг. 16. [0115] Другими словами, секция 50 определения коррозии определяет то, вводится или нет 1 во флаг Flerr разрешения анормальности (этап S1201). Если Flerr равен 1, последовательность операций завершается. С другой стороны, если Flerr равен 0, секция 50 определения коррозии считывает крутящий момент Tr поворота при рулении (этап S1202). Затем секция 50 определения коррозии считывает значение Terr крутящего момента поворота при рулении при анормальности (этап S1203), и после этого подсчитывает значение Tnts счетчика таймера (1 прибавляется к значению Tnts счетчика таймера) (этап S1204). [0116] Затем секция 50 определения коррозии определяет абсолютную величину между значением Tnts счетчика таймера, полученным на этапе S1204, и ранее сохраненным предварительно определенным значением E (этап S1205). В случае, если значение Tnts счетчика таймера меньше предварительно определенного значения E, а именно, в случае, если устанавливается взаимосвязь "Tnts<предварительно определенное значение E", секция 50 определения коррозии определяет абсолютную величину между крутящим моментом Tr поворота при рулении, считываемым на этапе S1202, и ранее сохраненным значением Terr крутящего момента поворота при рулении при анормальности (этап S1206). [0117] В случае, если крутящий момент Tr поворота при рулении равен или выше значения Terr крутящего момента поворота при рулении при анормальности, а именно, в случае, если не устанавливается взаимосвязь "Tr [0118] Затем на этапе S1207, в случае, если значение Cerr счетчика анормальностей превышает предварительно определенное значение H1, а именно, в случае, если устанавливается взаимосвязь "Cerr>предварительно определенное значение H1", секция 50 определения коррозии определяет то, что анормальность, степень которой является большой, присутствует, 1 вводится во флаг Flerr разрешения анормальности (этап S1208), выполняет процесс прерывания работы системы (этап S1209), и в завершение, выполняет вывод индикаторов аварийных сигналов (этап S1210). После этого последовательность операций завершается. [0119] С другой стороны, в случае, если значение Cerr счетчика анормальностей равно или меньше предварительно определенного значения H1, а именно, в случае, если не устанавливается взаимосвязь "Cerr>предварительно определенное значение H1", секция 50 определения коррозии определяет то, что, по меньшей мере, серьезная анормальность не возникает, и определяет абсолютную величину между значением Cerr счетчика анормальностей и предварительно определенным значением H2 (этап S1212). [0120] Затем в случае, если значение Cerr счетчика анормальностей превышает предварительно определенное значение H2, а именно, в случае, если устанавливается взаимосвязь "Cerr>предварительно определенное значение H2", секция 50 определения коррозии определяет то, что степень анормальности является средней. Затем секция 50 определения коррозии выполняет вывод индикаторов аварийных сигналов (этап S1213), задает верхний предел крутящего момента электромотора равным 30% от заданного значения (этап S1214), и последовательность операций завершается. [0121] С другой стороны, на этапе S1212, в случае, если значение Cerr счетчика анормальностей равно или меньше предварительно определенного значения H3, а именно, в случае, если не устанавливается взаимосвязь "Cerr>предварительно определенное значение H2", секция 50 определения коррозии определяет то, что, по меньшей мере, средняя степень анормальности не возникает, и определяет абсолютную величину значения Cerr счетчика анормальностей и предварительно определенного значения H3 (этап S1215). [0122] Затем на этапе S1215, в случае, если значение Cerr счетчика анормальностей превышает предварительно определенное значение H3, а именно, в случае, если устанавливается взаимосвязь "Cerr>предварительно определенное значение H3", секция 50 определения коррозии определяет то, что анормальность в небольшой степени присутствует, выполняет вывод индикаторов аварийных сигналов (этап S1216) и задает верхний предел крутящего момента электромотора равным 50% от заданного верхнего предельного значения (этап S1217). После этого последовательность операций завершается. [0123] С другой стороны, на этапе S1215, в случае, если значение Cerr счетчика анормальностей равно или меньше предварительно определенного значения H3, а именно, в случае, если не устанавливается взаимосвязь "Cerr>предварительно определенное значение H3", секция 50 определения коррозии определяет то, что не присутствует анормальность, и последовательность операций завершается. [0124] Помимо этого, на этапе S1205, в случае, если значение Tnts счетчика таймера равно или выше предварительно определенного значения E, а именно, предварительно определенное число дискретизаций достигнуто, и не устанавливается взаимосвязь "Tnts<предварительно определенное значение E", сбрасывается значение Cerr счетчика анормальностей (этап S1218), и сбрасывается значение Tnts счетчика таймера (этап S1219). После этого, последовательность операций завершается. [0125] Согласно первой модификации, описанной выше, этапы S1215-S1217 добавляются во второй предпочтительный вариант осуществления. Другие структуры являются идентичными второму предпочтительному варианту осуществления. Таким образом, могут достигаться работа и преимущество, идентичные работе и преимуществу по второму предпочтительному варианту осуществления. В частности, в этой модификации выполняется такой пошаговый процесс, в котором в случае, если определяется то, что возникает анормальность в небольшой степени, верхнее предельное значение крутящего момента электромотора задается равным 50% от заданного значения, в случае, если определяется то, что возникает анормальность в средней степени, верхнее предельное значение крутящего момента электромотора задается равным 30% от заданного значения, а в случае, если определяется то, что возникает анормальность в большой степени, процесс прерывания работы системы выполняется. Таким образом, анормальность устройства может более четко сообщаться водителю посредством пошагового увеличения нагрузки по рулению. Совместимость предупреждений и предотвращение резкого увеличения нагрузки по рулению на водителя становится возможной. [0126] Следует отметить, что, вместо пошаговой нагрузки, может выполняться процесс постепенного уменьшения командного тока TRr электромотора, как пояснено со ссылкой на фиг. 14. [0127] Фиг. 18 показывает блок-схему последовательности операций способа, представляющую вторую модификацию второго предпочтительного варианта осуществления и представляющую использование командного тока TRr электромотора вместо крутящего момента Tr поворота при рулении при управлении по фиг. 16. [0128] Другими словами, секция 50 определения коррозии в этой последовательности операций определяет то, вводится или нет 1 во флаг Flerr разрешения анормальности (этап S1301). Если Flerr равен 1, последовательность операций завершается. С другой стороны, если Flerr равен 0, секция 50 определения коррозии считывает командный ток TRr электромотора из секции 32 вычисления вспомогательного тока (этап S1302), считывает ранее сохраненный диапазон MAP1 анормальности (этап S1303), считывает скорость Vs транспортного средства из датчика 29 скорости транспортного средства (этап 1304) и подсчитывает значение Tnts счетчика таймера (1 прибавляется к значению Tnts счетчика таймера) (этап S1305). [0129] Затем секция 50 определения коррозии определяет абсолютную величину между значением Tnts счетчика таймера, полученным на этапе S1305, и ранее сохраненным предварительно определенным значением E (этап S1306). Если значение Tnts счетчика таймера меньше предварительно определенного значения E, а именно, в случае, если устанавливается взаимосвязь "Tnts<предварительно определенное значение E", секция 50 определения коррозии определяет абсолютную величину между командным током TRr электромотора, считываемым на этапе S1302, и значением Trerr в диапазоне анормальности в пределах диапазона MAP1 анормальности, считываемым на этапе S1303 (этап S1307). [0130] Следует отметить, что ниже поясняются подробные сведения по диапазону MAP1 анормальности. Как показано на фиг. 19, командный ток TRr электромотора относительно скорости Vs транспортного средства попадает в пределы нормального диапазона нижней части фиг. 19 со значением Trerr в диапазоне анормальности, обозначаемым посредством кривой линии C1 в качестве границы. Верхняя часть фиг. 19 представляет собой диапазон анормальности. Следует отметить, что когда командный ток TRr электромотора относительно скорости Vs транспортного средства попадает на значение Terr в диапазоне анормальности, диапазон анормальности включается. [0131] Затем на этапе S1307 по фиг. 18, в случае, если командный ток TRr электромотора равен или выше анормального значения Trerr крутящего момента поворота при рулении, а именно, в случае, если командный ток TRr электромотора относительно скорости Vs транспортного средства попадает в диапазон анормальности по фиг. 19, так что не устанавливается взаимосвязь "TRr [0132] Помимо этого, на этапе S1306, в случае, если значение Tnts счетчика таймера равно или выше предварительно определенного значения E, а именно, предварительно определенное число дискретизаций E достигнуто, и не устанавливается взаимосвязь "Tnts<предварительно определенное значение E", секция 50 определения коррозии сбрасывает значение Cerr счетчика анормальностей (этап S1313) и сбрасывает значение Tnts счетчика таймера (этап S1314). После этого последовательность операций завершается. [0133] Затем на этапе S1308, в случае, если значение Cerr счетчика анормальностей равно или меньше предварительно определенного значения H, а именно, в случае, если не устанавливается взаимосвязь "Cerr>предварительно определенное значение H", секция 50 определения коррозии определяет то, что анормальность не присутствует, и последовательность операций завершается. С другой стороны, на этапе S1308, в случае, если значение Cerr счетчика анормальностей превышает предварительно определенное значение H, а именно, в случае, если устанавливается взаимосвязь "Cerr>предварительно определенное значение H", секция 50 определения коррозии определяет то, что присутствует анормальность, прибавляет 1 к флагу Flerr разрешения анормальности (этап S1309), выполняет процесс прерывания работы системы (этап S1310), и в завершение, выполняет вывод индикаторов аварийных сигналов (этап S1311). После этого последовательность операций завершается. [0134] Как описано выше, согласно второй модификации, когда частота, с которой командный ток электромотора в качестве соответствующего значения нагрузки по рулению превышает значение Trerr в диапазоне анормальности в качестве заданного значения, превышает предварительно определенное значение H, определяется анормальность. Следовательно, аналогично второму предпочтительному варианту осуществления, не требуется отдельного элемента, как в традиционной технологии, и может определяться только требуемая анормальность. [0135] Фиг. 20 показывает блок-схему последовательности операций способа, представляющую третью модификацию второго предпочтительного варианта осуществления и представляющую использование фактического тока Ir электромотора вместо крутящего момента Tr поворота при рулении при управлении по фиг. 16. [0136] Другими словами, секция 50 определения коррозии в этой последовательности операций определяет то, прибавляется или нет 1 к флагу Flerr разрешения анормальности (этап S1401). Если Flerr равен 1, последовательность операций завершается. С другой стороны, если Flerr равен 0, секция 50 определения коррозии считывает фактический ток Ir электромотора из секции 34 приведения в действие электромотора (этап S1402), считывает ранее сохраненный диапазон MAP2 анормальности (этап S1403) и считывает скорость Vs транспортного средства из датчика 29 скорости транспортного средства (этап S1404). После этого, секция 50 определения коррозии подсчитывает значение Tnts счетчика таймера (1 прибавляется к значению Tnts счетчика таймера) (этап S1405). [0137] Затем секция 50 определения коррозии определяет абсолютную величину между значением Tnts счетчика таймера, полученным на этапе S1405, и ранее сохраненным предварительно определенным значением E (этап S1406). В случае, если значение Tnts счетчика таймера меньше предварительно определенного значения E, а именно, в случае, если устанавливается взаимосвязь "Tnts<предварительно определенное значение E", секция 50 определения коррозии определяет абсолютную величину между фактическим током Ir электромотора, считываемым на этапе S1402, и значением lerr в диапазоне анормальности в пределах диапазона MAP2 анормальности, считываемым на этапе S1403 (этап S1407). [0138] Следует отметить, что ниже поясняются подробные сведения по карте MAP2 диапазона анормальности. Как показано на фиг. 21, фактический ток Ir электромотора относительно скорости Vs транспортного средства попадает в пределы нормального диапазона нижней части фиг. 19 со значением lerr в диапазоне анормальности, обозначаемым посредством кривой линии C2 в качестве границы. Верхняя часть фиг. 21 представляет собой диапазон анормальности. Следует отметить, что когда фактический ток Ir электромотора относительно скорости Vs транспортного средства попадает на значение lerr в диапазоне анормальности, диапазон анормальности включается. [0139] Затем на этапе S1407 по фиг. 20, если фактический ток Ir электромотора равен или выше значения lerr в диапазоне анормальности, а именно, в случае, если фактический ток Ir электромотора относительно скорости Vs транспортного средства попадает в диапазон анормальности на фиг. 21, так что не устанавливается взаимосвязь "Ir [0140] Помимо этого, на этапе S1406, в случае, если значение Tnts счетчика таймера равно или выше предварительно определенного значения E, а именно, предварительно определенное число дискретизаций E достигнуто, и не устанавливается взаимосвязь "Tnts<предварительно определенное значение E", секция 50 определения коррозии сбрасывает счетчик Cerr анормальностей (этап S1413) и сбрасывает значение Tnts счетчика таймера (этап S1414). После этого последовательность операций завершается. [0141] Затем на этапе S1408, в случае, если значение Cerr счетчика анормальностей равно или меньше предварительно определенного значения H, а именно, в случае, если не устанавливается взаимосвязь "Cerr>предварительно определенное значение H", секция 50 определения коррозии определяет то, что не присутствует анормальность, и последовательность операций завершается. С другой стороны, в случае, если значение Cerr счетчика анормальностей превышает предварительно определенное значение H, а именно, в случае, если устанавливается взаимосвязь "Cerr>предварительно определенное значение H", секция 50 определения коррозии определяет то, что присутствует анормальность. Затем секция 50 определения коррозии вводит 1 во флаг Flerr разрешения анормальности (этап S1409), выполняет процесс прерывания работы системы (этап S1410), и после этого выполняет вывод индикаторов аварийных сигналов (этап S1411). После этого последовательность операций завершается. [0142] Как описано выше, согласно третьей модификации, когда частота, с которой значение фактического тока электромотора Ir в качестве соответствующего значения нагрузки по рулению превышает значение lerr в диапазоне анормальности в качестве заданного значения, превышает предварительно определенное значение H, определяется анормальность. Таким образом, аналогично второму предпочтительному варианту осуществления, не требуется отдельных элементов, как в традиционной технологии, и может определяться только требуемая анормальность. [0143] Следует отметить, что во втором предпочтительном варианте осуществления в и каждой из связанных модификаций, добавляется процесс, как показано на фиг. 7-9, так что состояние движения по прямой, состояние поддержания постоянного руления может исключаться из определения анормальностей. [0144] Как описано выше, настоящее изобретение не ограничено соответствующими вариантами осуществления и т.д. Свободные модификации структур являются возможными без отступления от сущности настоящего изобретения. [0145] В частности, в каждом из предпочтительных вариантов осуществления, настоящее изобретение применяется к устройству усилителя рулевого управления так называемого типа вспомогательного усиления, прикладываемого к зубчатой рейке. Тем не менее, настоящее изобретение не ограничено этим. Другими словами, настоящее изобретение является применимым к устройству усилителя рулевого управления, отличному от типа вспомогательного усиления, прикладываемого к зубчатой рейке, например, к устройству усилителя рулевого управления со вспомогательным усилением, прикладываемым к рулевой колонке, или со вспомогательным усилением, прикладываемым к ведущей шестерне. В этом случае, вал рулевой колонки и вал шестерни, составляющие механизм рулевого управления, изготовлены из стальных материалов. Следовательно, имеется вероятность появления неудобств вследствие коррозии, описанных выше. Даже если устройство усилителя рулевого управления имеет тип, описанный выше, вариант применения настоящего изобретения может пользоваться преимуществами определения анормальностей. [0146] Ниже описывается изобретение, понимаемое из соответствующих предпочтительных вариантов осуществления и не описанное в формуле изобретения. [0147] Пункт a формулы изобретения Устройство усилителя рулевого управления по п. 1, в котором схема вычисления средних значений нагрузки по рулению сохраняет самое последнее значение для среднего значения для соответствующего значения нагрузки по рулению в энергонезависимом запоминающем устройстве, когда переключатель зажигания транспортное средство выключается. [0148] Согласно этому изобретению, когда переключатель зажигания выключается, прекращается подача питания в модуль управления. Тем не менее, поскольку самое последнее значение для среднего значения для соответствующего значения нагрузки по рулению сохраняется в энергонезависимом запоминающем устройстве, информация до того, как переключатель зажигания выключается, может использоваться во время повторного зажигания (когда переключатель зажигания снова включен). [0149] Пункт b формулы изобретения Устройство усилителя рулевого управления по п. a, в котором схема вычисления средних значений нагрузки по рулению вычисляет среднее значение для соответствующего значения нагрузки по рулению на основе информации среднего значения для соответствующего значения нагрузки по рулению, сохраненного в энергонезависимом запоминающем устройстве, и соответствующего значения нагрузки по рулению после того, как включается переключатель зажигания, когда переключатель зажигания транспортное средство включается. [0150] Согласно этому изобретению, среднее значение для соответствующего значения нагрузки по рулению может вычисляться как на основе информации до того, так и на основе после того, как включается переключатель зажигания. Таким образом, может выполняться более высокоточное вычисление среднего значения. [0151] Пункт c формулы изобретения Устройство усилителя рулевого управления по п. b, в котором схема вычисления средних значений нагрузки по рулению вычисляет среднее значение для соответствующего значения нагрузки по рулению посредством задания весового коэффициента среднего значения для соответствующего значения нагрузки по рулению, сохраненного в энергонезависимом запоминающем устройстве, большим соответствующего значения нагрузки по рулению после того, как включается переключатель зажигания. [0152] Согласно этому изобретению, среднее значение для соответствующего значения нагрузки по рулению, сохраненного в энергонезависимом запоминающем устройстве, является средним значением для соответствующего значения нагрузки по рулению, дискретизированного в течение длительного времени. Следовательно, посредством увеличения весового коэффициента среднего значения во время вычисления среднего значения, может достигаться более точное вычисление среднего значения. [0153] Пункт d формулы изобретения Устройство усилителя рулевого управления по п. 1, в котором схема определения анормальностей включает световой аварийный сигнал, установленный в транспортном средстве, когда схема определения анормальностей определяет анормальность устройства. [0154] Согласно этому изобретению, загорание светового аварийного сигнала информирует водителя в отношении анормальности устройства для обеспечения возможности привлечения внимания. [0155] Пункт e формулы изобретения Устройство усилителя рулевого управления по п. d, в котором модуль управления выводит командный ток электромотора, который имеет меньшее значение, чем командный ток электромотора, когда анормальность устройства не присутствует, когда схема определения анормальностей определяет анормальность устройства. [0156] Согласно этому изобретению, помощь при рулении не прекращается во время возникновения анормальности, но командный ток электромотора снижается, чтобы выполнять помощь при рулении. Таким образом, в то время как резкое увеличение нагрузки по рулению на водителя не допускается, анормальность устройства может сообщаться водителю. [0157] Пункт f формулы изобретения Устройство усилителя рулевого управления по п. e, в котором модуль управления вычисляет командный ток электромотора в форме постепенного уменьшения командного тока электромотора, когда схема определения анормальностей определяет анормальность устройства. [0158] Согласно этому изобретению, в то время как резкое увеличение нагрузки по рулению на водителя не допускается, анормальность устройства может сообщаться водителю. [0159] Пункт g формулы изобретения Устройство усилителя рулевого управления по п. f, в котором модуль управления постепенно уменьшает командный ток электромотора в соответствии с соответствующим значением нагрузки по рулению. [0160] Согласно этому изобретению, может подавляться ухудшение ощущения при рулении вследствие увеличения нагрузки по рулению. [0161] Пункт h формулы изобретения Устройство усилителя рулевого управления по п. d, в котором модуль управления обнуляет командный ток электромотора после постепенного уменьшения командного тока электромотора. [0162] Согласно этому изобретению, в завершение, обнуляется командный ток электромотора. Следовательно, при том, что нагрузка постепенно уменьшается, может становиться возможным более точное привлечение внимания. Может подавляться продолжение вождения водителем в течение длительного времени в состоянии, в котором анормальность возникает. [0163] Пункт i формулы изобретения Устройство усилителя рулевого управления по п. 1, в котором механизм рулевого управления включает в себя зубчатую рейку, которая аксиально перемещается вследствие оборота руля для того, чтобы рулить управляемыми колесами, и редукторный механизм включает в себя шариковинтовый механизм, имеющий: канавку под шариковый винт на стороне зубчатой рейки, установленную на внешней периферийной стороне зубчатой рейки и имеющую форму спиральной канавки; гайку, кольцеобразно установленную таким образом, что в ней размещается зубчатая рейка, и установленную с возможностью вращения относительно зубчатой рейки; канавку под шариковый винт на стороне гайки, установленную на внутренней периферийной стороне гайки, имеющую форму спиральной канавки и составляющую канавку для кругового движения шариков вместе с шариковым винтом на стороне рулевого вала; множество шариков, установленных внутри канавки для кругового движения шариков; и элемент кругового движения, установленный на внешней стороне радиального направления гайки и соединяющий одну торцевую сторону канавки для шарика и его другую сторону для обеспечения кругового движения множества шариков от одной торцевой стороны канавки для кругового движения шариков к другой торцевой стороне, и трансмиссионный механизм, который передает вращение электромотора на гайку. [0164] Согласно этому изобретению, даже если коррозия развивается в канавке для кругового движения шариков шариковинтового механизма, развитие (распространение) коррозии может определяться на основе среднего значения для соответствующего значения нагрузки по рулению. [0165] Пункт j формулы изобретения Устройство усилителя рулевого управления по п. 6, в котором схема определения анормальностей сравнивает соответствующее значение нагрузки по рулению, когда руль подвергается операции руления, с заданным значением, для того чтобы вычислять частоту. [0166] Если частота соответствующего значения нагрузки по рулению, которое превышает заданный крутящий момент, что включает в себя такую ситуацию, что нагрузка по рулению не формируется, как в состоянии движения по прямой, частота распознается как низкая, и имеется вероятность того, что определение распространения коррозии задерживается (выполняется позднее), даже если коррозия развивается. Тем не менее, согласно этому изобретению, нагрузка по рулению, когда операция руления не выполняется, исключается из вычисления частоты. Таким образом, более точное вычисление частоты становится возможным, и развитие (распространение) коррозии может определяться раньше. [0167] Пункт k формулы изобретения Устройство усилителя рулевого управления по п. j, в котором схема определения анормальностей определяет состояние, в котором руль подвергается операции руления, на основе скорости руления, момента относительно вертикальной оси транспортного средства или разности скоростей вращения левого и правого управляемых колес. [0168] Согласно этому изобретению, состояние операции руления может определяться на основе произвольных параметров. [0169] Пункт l формулы изобретения Устройство усилителя рулевого управления по п. 6, в котором модуль управления выводит командный ток электромотора, который имеет меньшее значение, чем командный ток электромотора, когда анормальность устройства не присутствует, когда схема определения анормальностей определяет анормальность устройства. [0170] Согласно этому изобретению, помощь при рулении не прекращается во время возникновения анормальности, но командный ток электромотора снижается, чтобы выполнять помощь при рулении. Таким образом, в то время как резкое увеличение нагрузки по рулению на водителя не допускается, анормальность устройства может сообщаться водителю. [0171] Пункт m формулы изобретения Устройство усилителя рулевого управления по п. l, в котором модуль управления вычисляет командный ток электромотора в форме постепенного уменьшения командного тока электромотора, когда схема определения анормальностей определяет анормальность устройства. [0172] Согласно настоящему изобретению, в то время как резкое увеличение нагрузки по рулению на водителя не допускается, анормальность устройства может сообщаться водителю. Пояснение позиционных обозначений [0173] 1 – руль 2 – управляемое колесо 3 – управляемое колесо 18 – ECU (модуль управления) 19 – электромотор 23 –датчик крутящего момента 27 – шариковинтовой механизм (редукторный механизм) 39 – схема вычисления средних значений нагрузки по рулению 40 – схема определения анормальностей Tr – крутящий момент поворота при рулении TRr – командный ток электромотора Ir – фактический ток электромотора Trav – среднее значение крутящего момента поворота при рулении (среднее значение) Trrf – заданное значение крутящего момента поворота при рулении (заданное значение).
Реферат
Изобретение относится к устройству усилителя рулевого управления. Устройство усилителя рулевого управления содержит механизм рулевого управления, который рулит управляемыми колесами в соответствии с операцией руления руля, электромотор, который предоставляет силу поворота при рулении для механизма рулевого управления, трансмиссионный механизм, который передает силу вращения электромотора в механизм рулевого управления, датчик крутящего момента, который определяет крутящий момент поворота при рулении, сформированный в механизме рулевого управления, и модуль управления. Модуль управления вычисляет командный ток электромотора, управляющий с возможностью приведения в действие электромотором на основе крутящего момента поворота при рулении, и выводит командный ток электромотора в электромотор. Модуль управления получает сигналы, связанные с нагрузкой по рулению во время операции руления в течение предварительно определенного интервала времени, и обнаруживает анормальность упомянутого устройства на основе усредненного обработанного значения сигналов. Достигается повышение безопасности эксплуатации транспортного средства. 11 з.п. ф-лы, 21 ил.
Комментарии